Vous aimerez peut-être aussi
- COURS Théorie Des Mécanismes PDFDocument5 pagesCOURS Théorie Des Mécanismes PDFMohamed NaciriPas encore d'évaluation
- Theorie Des Mecanismes Hyperstatisme, Mobilite, Liaison EquivalenteDocument8 pagesTheorie Des Mecanismes Hyperstatisme, Mobilite, Liaison EquivalenteothmanePas encore d'évaluation
- 4-Notion de Théorie Des Mécanismes PDFDocument5 pages4-Notion de Théorie Des Mécanismes PDFhamzaPas encore d'évaluation
- ANALYSE de MécanismeDocument53 pagesANALYSE de MécanismeAchref Sallami100% (1)
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- TD Chaines de SolidesDocument2 pagesTD Chaines de Solidessoufiane8fka100% (2)
- Cours Analyse Des MecanismesDocument10 pagesCours Analyse Des MecanismesNeoXana01Pas encore d'évaluation
- Examen Theorie Des Mécanismes 2016 (Solution)Document3 pagesExamen Theorie Des Mécanismes 2016 (Solution)Abdou EssamyPas encore d'évaluation
- Série 01 Avec Solution TypeDocument3 pagesSérie 01 Avec Solution Typenafaa_ali1375Pas encore d'évaluation
- Ci02td 2Document5 pagesCi02td 2Samy BoujihaPas encore d'évaluation
- (TDM) (CO) Theorie Des MecanismesDocument6 pages(TDM) (CO) Theorie Des MecanismesSimoMonkadPas encore d'évaluation
- DS1 ECAM3aDocument4 pagesDS1 ECAM3aQuentin MoalPas encore d'évaluation
- CATIA V5 DocumentDocument6 pagesCATIA V5 DocumentChokri AtefPas encore d'évaluation
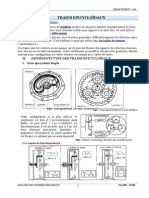
- Train ÉpicycloïdauxDocument9 pagesTrain ÉpicycloïdauxKamel Bousnina100% (1)
- TCM Cours GIM 1 ZINE PDFDocument64 pagesTCM Cours GIM 1 ZINE PDFAbdelmajid AittalebPas encore d'évaluation
- Mecanismes ExercicesDocument6 pagesMecanismes ExercicesOumaima BK0% (1)
- GM DS9-2013 CorrigéDocument4 pagesGM DS9-2013 CorrigéGray AbPas encore d'évaluation
- 13 9 TD - Transmission PDFDocument10 pages13 9 TD - Transmission PDFRanya ouherrouPas encore d'évaluation
- Max PIDDocument19 pagesMax PIDmarinmikaelPas encore d'évaluation
- TD 17 Corrigé - Liaisons ÉquivalentesDocument6 pagesTD 17 Corrigé - Liaisons ÉquivalentesJawad Hamriti50% (2)
- Chapitre 2 - Méca Transf de Mvts Par Syst Bielle ManivelleDocument14 pagesChapitre 2 - Méca Transf de Mvts Par Syst Bielle Manivelleelking gingstarsPas encore d'évaluation
- La Théorie Des MécanismesDocument13 pagesLa Théorie Des MécanismesMohamed Ali ElouaerPas encore d'évaluation
- Hyperstatisme Et Mobilité: Liaisons en ParallèleDocument11 pagesHyperstatisme Et Mobilité: Liaisons en ParallèleMohamed OuaggaPas encore d'évaluation
- Cours Theorie Des Mecanismes PDFDocument12 pagesCours Theorie Des Mecanismes PDFmaraghni_hassine7592100% (2)
- Correction TD 3 Schéma CinématiqueDocument7 pagesCorrection TD 3 Schéma CinématiqueShooting StarPas encore d'évaluation
- Théorie de MécanismeDocument10 pagesThéorie de Mécanismemejri merinPas encore d'évaluation
- Exo2 - Composition Des MouvementsDocument6 pagesExo2 - Composition Des MouvementsToufikJalalEddinePas encore d'évaluation
- TD 4 Loi Entrée Sortie Par Fermeture CinématiqueDocument2 pagesTD 4 Loi Entrée Sortie Par Fermeture CinématiqueAb DouPas encore d'évaluation
- 32 Fermeture Geo ExercicesDocument4 pages32 Fermeture Geo Exerciceslaalai faicelPas encore d'évaluation
- Cours Theorie MecanismeDocument15 pagesCours Theorie Mecanismemaraghni_hassine7592Pas encore d'évaluation
- TD - Théorie Des Mécanismes Pompe À Piston Radial: CorrigéDocument8 pagesTD - Théorie Des Mécanismes Pompe À Piston Radial: Corrigéسكينة مريم100% (2)
- TD 10 - Comportement Cinématique Des SystèmesDocument4 pagesTD 10 - Comportement Cinématique Des Systèmesbhs channelPas encore d'évaluation
- Poly Théorie Des MécanismesDocument24 pagesPoly Théorie Des MécanismesJaksMaksPas encore d'évaluation
- TD N°3 PFS AnalytiqueDocument6 pagesTD N°3 PFS AnalytiqueRoubaPas encore d'évaluation
- TD 18 - Lois Entrée-Sortie en Position Et en VitesseDocument6 pagesTD 18 - Lois Entrée-Sortie en Position Et en Vitessebhs channelPas encore d'évaluation
- 31 EmbrayagesDocument12 pages31 EmbrayagesSimoMonkad100% (1)
- Promotion 2020: Les Systèmes Hydrauliques Et PneumatiquesDocument6 pagesPromotion 2020: Les Systèmes Hydrauliques Et PneumatiquesRahma BoufarhPas encore d'évaluation
- PTSI - TD Analyse Des MecanismesDocument6 pagesPTSI - TD Analyse Des MecanismesprincePas encore d'évaluation
- Cours - Cinématique Comprimé PDFDocument42 pagesCours - Cinématique Comprimé PDFMohammed Afkir100% (2)
- Corrigé TD 15 - Liaisons - Schéma CinématiqueDocument6 pagesCorrigé TD 15 - Liaisons - Schéma Cinématiquebhs channelPas encore d'évaluation
- TD Liaisons - Schema Cinematique Corrige - 2Document6 pagesTD Liaisons - Schema Cinematique Corrige - 2Ali OuahmadPas encore d'évaluation
- Chapitre1 - Liaisons MécaniquesDocument9 pagesChapitre1 - Liaisons MécaniquesZakaria BaidPas encore d'évaluation
- SERIE TD2 - Cinematique - 2020 2021Document10 pagesSERIE TD2 - Cinematique - 2020 2021Nowe AhmadePas encore d'évaluation
- Dynamique de Machines TournantesDocument67 pagesDynamique de Machines TournantesTôha MaïgaPas encore d'évaluation
- 43 Exercices EngrenageDocument9 pages43 Exercices EngrenageIlyas MhammediPas encore d'évaluation
- TD 20 - Lois Entrée-Sortie en Position Et en VitesseDocument10 pagesTD 20 - Lois Entrée-Sortie en Position Et en Vitessebhs channelPas encore d'évaluation
- CS-TM1-TD Hyperstatisme Bielle Manivelle CorrectionDocument9 pagesCS-TM1-TD Hyperstatisme Bielle Manivelle CorrectionPierre LancelotPas encore d'évaluation
- Thème 1 - Poulie Redex-1Document1 pageThème 1 - Poulie Redex-1Anime forever 20160% (1)
- Serie Des TD N°4 Engrenages EMDocument6 pagesSerie Des TD N°4 Engrenages EMGrine Salah EddinePas encore d'évaluation
- Association de Liaisons PDFDocument8 pagesAssociation de Liaisons PDFAnis SouissiPas encore d'évaluation
- Chap3 Hyperstatisme Et Mobilité Des MécanismesDocument21 pagesChap3 Hyperstatisme Et Mobilité Des Mécanismesmamadou diopPas encore d'évaluation
- 2011 2012 MP TD Theorie Des MecanismesDocument4 pages2011 2012 MP TD Theorie Des MecanismesJaouad El50% (4)
- Réducteur À Arbre CreuxDocument10 pagesRéducteur À Arbre CreuxBouker Mohamed100% (1)
- TD 25 - PFS Résolution Analytique + AM Dans Les Liaisons ParfaitesDocument6 pagesTD 25 - PFS Résolution Analytique + AM Dans Les Liaisons Parfaitesbhs channel100% (1)
- Fusion 360 | étape par étape: Conception CAO, Simulation FEM & FAO pour les débutants.D'EverandFusion 360 | étape par étape: Conception CAO, Simulation FEM & FAO pour les débutants.Pas encore d'évaluation
- Schema Cinematique CoursDocument4 pagesSchema Cinematique CoursRihabBelgadaPas encore d'évaluation
- MEC-Analyse Des Mécanismes-Isostatisme-HyperstatismeDocument9 pagesMEC-Analyse Des Mécanismes-Isostatisme-HyperstatismeDog RayzPas encore d'évaluation
- TD Robotique M1 Fabrication Mécanique - 21-22 BoutaaniDocument1 pageTD Robotique M1 Fabrication Mécanique - 21-22 BoutaaniFAWZI RONALDOPas encore d'évaluation
- Résumé Avec Exercices - Robotique Industrielle 2021-Partie 01Document5 pagesRésumé Avec Exercices - Robotique Industrielle 2021-Partie 01FAWZI RONALDOPas encore d'évaluation
- Eléments Des Machines OutilsDocument34 pagesEléments Des Machines OutilsFAWZI RONALDOPas encore d'évaluation
- Programmation Des Machines - OutilsDocument27 pagesProgrammation Des Machines - OutilsFAWZI RONALDOPas encore d'évaluation
- Cours Sur La Commande NumériqueDocument12 pagesCours Sur La Commande NumériqueFAWZI RONALDOPas encore d'évaluation
- Sujet TP Transferts ThermiquesDocument1 pageSujet TP Transferts ThermiquesFAWZI RONALDOPas encore d'évaluation
- Examen CM2 2020Document2 pagesExamen CM2 2020FAWZI RONALDOPas encore d'évaluation
- Frein Refroidissement LubrifDocument34 pagesFrein Refroidissement LubrifFAWZI RONALDO100% (1)
- Ex HyperstatismeDocument4 pagesEx HyperstatismeImmamHadramyPas encore d'évaluation
- CH8 Systèmes de TreillisDocument25 pagesCH8 Systèmes de TreillisMery20000Pas encore d'évaluation
- Corps de Precis Meca Appliquee 1 F4Document147 pagesCorps de Precis Meca Appliquee 1 F4Jean Jules Badiang100% (1)
- S623.2 Comportement Des MecanismesDocument3 pagesS623.2 Comportement Des MecanismesGhada Mouedhen100% (2)
- Module 08 Connaissance de La RDM-BTP-TCCTPDocument48 pagesModule 08 Connaissance de La RDM-BTP-TCCTPMansour OuakkariPas encore d'évaluation
- QCM RDMDocument7 pagesQCM RDMhassen100% (6)
- Programme Construction Mecanique CMA-MVTDocument18 pagesProgramme Construction Mecanique CMA-MVTESSOME ESSOME OLIVIER STEPHANEPas encore d'évaluation
- RDM 1Document146 pagesRDM 1Zakaria AzzouziPas encore d'évaluation
- Calcul D'un Portique en Élastoplasticité: M M M M M MDocument9 pagesCalcul D'un Portique en Élastoplasticité: M M M M M MAdnanePas encore d'évaluation
- Contrôle #1 TEC 373: Universite de BatnaDocument9 pagesContrôle #1 TEC 373: Universite de Batnabadia ben abdellahPas encore d'évaluation
- TreillisDocument9 pagesTreillisGérard Claude EssomePas encore d'évaluation
- Préparation À L'examen FinalDocument3 pagesPréparation À L'examen FinalMyriamPas encore d'évaluation
- NZENDJANG SITIO WILFRIED - Pilier Analyse Des StructuresDocument11 pagesNZENDJANG SITIO WILFRIED - Pilier Analyse Des Structureslando de chancePas encore d'évaluation
- Parti Constructif Sismique, DPEA PDFDocument71 pagesParti Constructif Sismique, DPEA PDFLahcen LakdimPas encore d'évaluation
- Dimensionnement Des StructuresDocument87 pagesDimensionnement Des StructuresbeinouPas encore d'évaluation
- TP Pont en Treillis West Point Bridge ELEVE V3Document17 pagesTP Pont en Treillis West Point Bridge ELEVE V3NesboardPas encore d'évaluation
- Cours de RDMDocument133 pagesCours de RDMRomaric TchakoutePas encore d'évaluation
- Rapport CricDocument26 pagesRapport CricNina50% (2)
- Conception Et Dimensionnement de La PrecDocument37 pagesConception Et Dimensionnement de La PrecSâg-atuo Brice Moussa HienPas encore d'évaluation
- Cours RDM - MS1 - Partie 1Document53 pagesCours RDM - MS1 - Partie 1gcd19Pas encore d'évaluation
- Chapitre 5 - Equilibre Des Corps RigidesDocument44 pagesChapitre 5 - Equilibre Des Corps RigidesChadwick TCHALAPas encore d'évaluation
- TGC4 Presentation Intro PDFDocument15 pagesTGC4 Presentation Intro PDFbhjgggggPas encore d'évaluation
- TATSAMBON - Rapport Méthodes ÉnergétiquesDocument15 pagesTATSAMBON - Rapport Méthodes Énergétiqueslando de chancePas encore d'évaluation
- Intro Aux Calculs de Structure - 1Document130 pagesIntro Aux Calculs de Structure - 1manidjuisorellePas encore d'évaluation
- Travaux Pratiques Méthodes Numériques - 240318 - 135502Document27 pagesTravaux Pratiques Méthodes Numériques - 240318 - 135502aboularmachefPas encore d'évaluation
- Machines Outils Porte PiecesDocument13 pagesMachines Outils Porte PiecesMehdi Billah ouassim100% (1)
- TP Poutres SolidworksDocument12 pagesTP Poutres SolidworkswatsopPas encore d'évaluation
- Mobilite Et HyperstatismeDocument6 pagesMobilite Et HyperstatismeImen HammoudaPas encore d'évaluation