Vous aimerez peut-être aussi
- TD Trains Epicycloidaux PDFDocument3 pagesTD Trains Epicycloidaux PDFHechmi Chermiti100% (2)
- TD 20 - Lois Entrée-Sortie en Position Et en VitesseDocument10 pagesTD 20 - Lois Entrée-Sortie en Position Et en Vitessebhs channelPas encore d'évaluation
- Chap08 MAS PDFDocument4 pagesChap08 MAS PDFCheikh Brahim Elkhadar100% (1)
- TD Train ÉpicycloïdalDocument5 pagesTD Train Épicycloïdalpapouch1350% (2)
- Train ÉpicycloidalDocument3 pagesTrain ÉpicycloidalAhmed Farahidi75% (4)
- TdengrenageDocument5 pagesTdengrenageImane FarrassPas encore d'évaluation
- CIN06 TD Sujet - Déterminer La Loi Entrée-Sortie Cinématique D'un Réducteur Ou D'un Multiplicateur de Vitesse À Train Épicycloïdal PDFDocument6 pagesCIN06 TD Sujet - Déterminer La Loi Entrée-Sortie Cinématique D'un Réducteur Ou D'un Multiplicateur de Vitesse À Train Épicycloïdal PDFBouslama NPas encore d'évaluation
- CI03 TD09 Sujet - Modéliser Le Comportement Cinématique Des Trains ÉpicycloïdauxDocument6 pagesCI03 TD09 Sujet - Modéliser Le Comportement Cinématique Des Trains ÉpicycloïdauxIsmail El MoufakirPas encore d'évaluation
- Cours EngrenagesDocument5 pagesCours EngrenagesJesuis ContentPas encore d'évaluation
- Corrigé TD 15 - Liaisons - Schéma CinématiqueDocument6 pagesCorrigé TD 15 - Liaisons - Schéma Cinématiquebhs channelPas encore d'évaluation
- Thème 1 - Poulie Redex-1Document1 pageThème 1 - Poulie Redex-1Anime forever 20160% (1)
- TP - TambMot Concep Complet A4Document2 pagesTP - TambMot Concep Complet A4Tagne yvanPas encore d'évaluation
- TD 19 - Lois Entrée-Sortie en Position Et en VitesseDocument10 pagesTD 19 - Lois Entrée-Sortie en Position Et en Vitessebhs channel100% (2)
- TD N°3 Cinématique Du Contact PonctuelDocument4 pagesTD N°3 Cinématique Du Contact PonctuelAmine RbzPas encore d'évaluation
- 03 Cours Le Schema CinematiqueDocument7 pages03 Cours Le Schema CinematiqueMohammed El azhariPas encore d'évaluation
- Système D Ouverture - Fermeture Motorisé Du Coffre de L Audi A8 PDFDocument10 pagesSystème D Ouverture - Fermeture Motorisé Du Coffre de L Audi A8 PDFtaiebshowPas encore d'évaluation
- TD-Presse MotoDocument7 pagesTD-Presse MotoSegaAlainCoulibalyPas encore d'évaluation
- Résumé de TransmissionDocument3 pagesRésumé de TransmissionHafida EnnajiPas encore d'évaluation
- TD TRAIN EpicycloidalesDocument2 pagesTD TRAIN EpicycloidalesIlyas MhammediPas encore d'évaluation
- 08 Maquette Embrayag DisqueDocument5 pages08 Maquette Embrayag Disquederwiche100% (1)
- Train Epicycloidal Simple PDFDocument4 pagesTrain Epicycloidal Simple PDFEdgar ÉtapePas encore d'évaluation
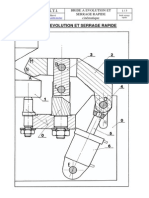
- Bride Serrage RapideDocument3 pagesBride Serrage RapideRedaAbdraouf0% (2)
- Serie Des TD N°4 Engrenages EMDocument6 pagesSerie Des TD N°4 Engrenages EMGrine Salah EddinePas encore d'évaluation
- TD Vis EcrouDocument3 pagesTD Vis EcrouHoussam Had0% (1)
- Controle Acc Emb FreinDocument7 pagesControle Acc Emb FreinkhayachiPas encore d'évaluation
- 03 Exercice Roue Et Vis Sans FinDocument1 page03 Exercice Roue Et Vis Sans FinAhmed NajjarPas encore d'évaluation
- Dossier Réponse CorrigéDocument5 pagesDossier Réponse CorrigéMrnadhir MecaniquePas encore d'évaluation
- TD 19 - Loi Entrée-Sortie Par Fermeture CinématiqueDocument4 pagesTD 19 - Loi Entrée-Sortie Par Fermeture CinématiqueDrisse Achar60% (5)
- 32-Roue de FrictionDocument4 pages32-Roue de FrictionHamza Kerroum100% (2)
- 10 Accouplements TemporairesDocument20 pages10 Accouplements Temporaireszouhour brahmi100% (1)
- Ci02td 2Document5 pagesCi02td 2Samy BoujihaPas encore d'évaluation
- 04 Exercice CremaillereDocument1 page04 Exercice CremaillereAhmed Najjar100% (1)
- Chapitre 3 Mécanismes À CAMES + Applications VETDocument18 pagesChapitre 3 Mécanismes À CAMES + Applications VETelking gingstars100% (1)
- Roues de FrictionDocument2 pagesRoues de FrictionKamel Bousnina0% (1)
- TD 2 EngrenagesDocument4 pagesTD 2 EngrenagesPFEPas encore d'évaluation
- TD 20 Corrigé - Loi Entrée-Sortie À L'aide D'un Produit Scalaire Constant de Deux Vecteurs D'orientationDocument6 pagesTD 20 Corrigé - Loi Entrée-Sortie À L'aide D'un Produit Scalaire Constant de Deux Vecteurs D'orientationMönsîeur Abd NourPas encore d'évaluation
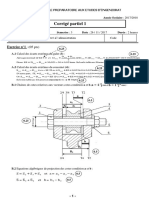
- Corrigé Partiel 1-2018Document4 pagesCorrigé Partiel 1-2018Ramdane BoulahiaPas encore d'évaluation
- Embrayages Frein 10 11 12 PDFDocument7 pagesEmbrayages Frein 10 11 12 PDFmohamed1101100% (1)
- TD 17 Corrigé - Liaisons ÉquivalentesDocument6 pagesTD 17 Corrigé - Liaisons ÉquivalentesJawad Hamriti50% (2)
- 19 Reducteur MultiplicateurDocument10 pages19 Reducteur MultiplicateurYoussef Trimech100% (3)
- Chapitre 2 - Méca Transf de Mvts Par Syst Bielle ManivelleDocument14 pagesChapitre 2 - Méca Transf de Mvts Par Syst Bielle Manivelleelking gingstarsPas encore d'évaluation
- TD20 Correction PDFDocument3 pagesTD20 Correction PDFPapa Gning100% (1)
- Exo2 - Composition Des MouvementsDocument6 pagesExo2 - Composition Des MouvementsToufikJalalEddinePas encore d'évaluation
- Cours EngrenageDocument6 pagesCours EngrenageMohsen LaabidiPas encore d'évaluation
- 43 Exercices EngrenageDocument9 pages43 Exercices EngrenageIlyas MhammediPas encore d'évaluation
- Repdes AppDocument15 pagesRepdes Appkuzgun cebeciPas encore d'évaluation
- TD TE 6.3 Train EpiDocument4 pagesTD TE 6.3 Train EpiKamel BousninaPas encore d'évaluation
- Série 01 Avec Solution TypeDocument3 pagesSérie 01 Avec Solution Typenafaa_ali1375Pas encore d'évaluation
- 4 - Roues de FrictionDocument8 pages4 - Roues de Frictionesloch100% (2)
- 17 TransformationDocument10 pages17 TransformationMohamed NaciriPas encore d'évaluation
- Transmission de PuissanceDocument19 pagesTransmission de Puissancesayr0sPas encore d'évaluation
- 17 Train ÉpicycloïdauxDocument9 pages17 Train Épicycloïdauxzouhour brahmiPas encore d'évaluation
- Reduct EursDocument5 pagesReduct EursAmine BouatraPas encore d'évaluation
- Cours EngrenagesDocument12 pagesCours Engrenagestopjob100% (4)
- Train EpicycloidalDocument12 pagesTrain EpicycloidalNaima LaaroussiPas encore d'évaluation
- TD Conception MécaniqueDocument10 pagesTD Conception MécaniqueConception & Fabrication Mécanique100% (1)
- Train Valseur Dernière PageDocument6 pagesTrain Valseur Dernière PageNaoufel Fares100% (1)
- Train PicycloidalDocument24 pagesTrain PicycloidalYoussef KhaliPas encore d'évaluation
- Exo TrainDocument3 pagesExo TrainAmadou DiawaraPas encore d'évaluation
- TD1 Complet2Document4 pagesTD1 Complet2Tafotchin KonePas encore d'évaluation
- Template IJARTechDocument3 pagesTemplate IJARTechKamel BousninaPas encore d'évaluation
- Fiche Descriptive Cours - EnligneDocument2 pagesFiche Descriptive Cours - EnligneKamel BousninaPas encore d'évaluation
- Ar Corrige PDFDocument3 pagesAr Corrige PDFKamel BousninaPas encore d'évaluation
- Wird & Warid PDFDocument53 pagesWird & Warid PDFKamel BousninaPas encore d'évaluation
- RESEAU-ISET-Guide de L'inscription Pour L'étudiantDocument15 pagesRESEAU-ISET-Guide de L'inscription Pour L'étudiantKamel BousninaPas encore d'évaluation
- Créer Des Cours en Ligne - UVT - V2Document25 pagesCréer Des Cours en Ligne - UVT - V2SaadBourouisPas encore d'évaluation
- Usure Des Outils ProfDocument11 pagesUsure Des Outils ProfKamel Bousnina0% (1)
- 2 EmbouDocument9 pages2 EmbouKamel BousninaPas encore d'évaluation
- FormulaireDocument4 pagesFormulaireKamel BousninaPas encore d'évaluation
- FORMAT Arduino 1er FethiDocument15 pagesFORMAT Arduino 1er FethiKamel Bousnina100% (3)
- 6-Roues Et ChaînesDocument5 pages6-Roues Et ChaînesKamel BousninaPas encore d'évaluation
- 1 DDLDocument14 pages1 DDLKamel BousninaPas encore d'évaluation
- Motoreducteur Écorché PDFDocument1 pageMotoreducteur Écorché PDFKamel BousninaPas encore d'évaluation
- Liaisons EquivalDocument5 pagesLiaisons EquivalKamel BousninaPas encore d'évaluation
- Ponts Roulants Piraprez EugèneDocument61 pagesPonts Roulants Piraprez EugènehansloPas encore d'évaluation
- Chapitre 2 Generalites Sur Les Lubrifiants PDFDocument14 pagesChapitre 2 Generalites Sur Les Lubrifiants PDFbachaer100% (1)
- 2016 CC GcgeoDocument3 pages2016 CC GcgeoKamel BousninaPas encore d'évaluation
- Chapitre 3 Categories Courantes Huiles Industrielles PDFDocument9 pagesChapitre 3 Categories Courantes Huiles Industrielles PDFKamel Bousnina100% (1)
- 2015 CC Gcgeo CorrigeDocument7 pages2015 CC Gcgeo CorrigeKamel BousninaPas encore d'évaluation
- Fascicule de TP Cao SolidworksDocument38 pagesFascicule de TP Cao SolidworksMed Ali100% (5)
- Prod Anim 1997 10 5 05Document14 pagesProd Anim 1997 10 5 05Kamel BousninaPas encore d'évaluation
- Chapitre 3 Categories Courantes Huiles Industrielles PDFDocument9 pagesChapitre 3 Categories Courantes Huiles Industrielles PDFKamel Bousnina100% (1)
- Presentation Du Logiciel Automation StudioDocument10 pagesPresentation Du Logiciel Automation StudioMohamed SomaiPas encore d'évaluation
- Chapitre 4 Controle Des Huiles PDFDocument9 pagesChapitre 4 Controle Des Huiles PDFSoufiane Kadar100% (1)
- TP 4 Etude Systeme DifferentielDocument10 pagesTP 4 Etude Systeme DifferentielKamel BousninaPas encore d'évaluation
- Chapitre 5 Lubrification Des RoulementsDocument19 pagesChapitre 5 Lubrification Des RoulementsKamel BousninaPas encore d'évaluation
- 9758Document4 pages9758Kamel BousninaPas encore d'évaluation
- DIMO Fiche Metier Education 2017 FRDocument2 pagesDIMO Fiche Metier Education 2017 FRKamel BousninaPas encore d'évaluation
- TP 7 Etude Chaine Transmission Puissance PDFDocument22 pagesTP 7 Etude Chaine Transmission Puissance PDFAGBAPas encore d'évaluation
- Prod Anim 1997 10 5 05Document14 pagesProd Anim 1997 10 5 05Kamel BousninaPas encore d'évaluation
- Exercice 03 TP 01Document2 pagesExercice 03 TP 01Wided TouhamiPas encore d'évaluation
- AuchanDocument1 pageAuchanSarah SkPas encore d'évaluation
- Tda 1562Document6 pagesTda 1562Iordan Dan FfnPas encore d'évaluation
- 03 Interrupteurs de Position CapteursDocument109 pages03 Interrupteurs de Position CapteursHyacinthe KossiPas encore d'évaluation
- Correction TD 3 Systèmes D'exploitation I (Suite)Document3 pagesCorrection TD 3 Systèmes D'exploitation I (Suite)ilef jouini100% (3)
- Chap1 Suite GPIOsDocument4 pagesChap1 Suite GPIOsWalid AmriPas encore d'évaluation
- Chapitre 1 - Introduction À La ProgrammationDocument1 pageChapitre 1 - Introduction À La ProgrammationIDRISSA SECK MBAYE100% (1)
- NfoDocument2 pagesNfomansour leyePas encore d'évaluation
- El Oufir El MehdiDocument21 pagesEl Oufir El MehdiEl Oufir El MehdiPas encore d'évaluation
- Anycubic Kobra Max 20230106 V0.1.0 FrancaisDocument60 pagesAnycubic Kobra Max 20230106 V0.1.0 FrancaisTedPas encore d'évaluation
- DVD - Hitachi Dv-Rx7000e SMDocument48 pagesDVD - Hitachi Dv-Rx7000e SMsssccc100Pas encore d'évaluation
- Exposé Système Des Fichiers Exploitation LINUXDocument36 pagesExposé Système Des Fichiers Exploitation LINUXyassinsaw100% (1)
- Storex Mpix357 FRDocument36 pagesStorex Mpix357 FRdaraltaPas encore d'évaluation
- 6eme s0 A1 Activite 2019 CorrectionDocument2 pages6eme s0 A1 Activite 2019 Correctionmasterprofessionnel2023Pas encore d'évaluation
- Micoprocesseur - Microcontrolleur - PIC16F84Document90 pagesMicoprocesseur - Microcontrolleur - PIC16F84Najwa NajmPas encore d'évaluation
- 01 Exercice Clavier Acces Reg CorrectionDocument5 pages01 Exercice Clavier Acces Reg CorrectionAmrouch JridiPas encore d'évaluation
- Data Warehouse & OLAPDocument14 pagesData Warehouse & OLAPfchougrani100% (2)
- Template Cours Caplogy (Ne Mettez Pas Vos Noms Sur Les Slides)Document58 pagesTemplate Cours Caplogy (Ne Mettez Pas Vos Noms Sur Les Slides)Ghita LazrekPas encore d'évaluation
- UP34Ffr FMZ 5000 Centrales de Detection IncendieDocument8 pagesUP34Ffr FMZ 5000 Centrales de Detection IncendierubenvarelafunPas encore d'évaluation
- Invizinimals Regles de JeuxDocument15 pagesInvizinimals Regles de Jeuxmanu carlierPas encore d'évaluation
- Bascules SynchronesDocument7 pagesBascules SynchronesMohamed Ben FredjPas encore d'évaluation
- CDC - Onduleur Salle Info PDFDocument18 pagesCDC - Onduleur Salle Info PDFahcenePas encore d'évaluation
- Politique Physique Et de L'environnementDocument2 pagesPolitique Physique Et de L'environnementBernard OBOUNGAPas encore d'évaluation
- Combivert Keb CommandeDocument28 pagesCombivert Keb CommandeprogrammationPas encore d'évaluation
- Fluids Imf RDocument716 pagesFluids Imf RAlberto OrihuelaPas encore d'évaluation
- Intb PZDS 10198 5Document117 pagesIntb PZDS 10198 5DatajaBerubePas encore d'évaluation
- Componentes FRDocument124 pagesComponentes FRPedro KalvinPas encore d'évaluation
- Cours Seconde C-1Document38 pagesCours Seconde C-1Steve WassoPas encore d'évaluation
- Cours AutocadDocument50 pagesCours AutocadWassim DjennanePas encore d'évaluation
- Dokumen - Tips Microprocesseur 8086Document79 pagesDokumen - Tips Microprocesseur 8086fatihahamel24Pas encore d'évaluation