Vous aimerez peut-être aussi
- Treuil Sujet Et CorrigeDocument3 pagesTreuil Sujet Et CorrigeThierry OUAMBO FOTSOPas encore d'évaluation
- Devoir Sq8 StatiqueDocument8 pagesDevoir Sq8 StatiqueRuben100% (1)
- Construction Mécanique - TD Spéciaux - MkaDocument13 pagesConstruction Mécanique - TD Spéciaux - MkaJordan Yakam0% (1)
- DeutzDocument228 pagesDeutzAlin Varga50% (4)
- 43 Exercices EngrenageDocument9 pages43 Exercices EngrenageIlyas MhammediPas encore d'évaluation
- CI03 TD09 Sujet - Modéliser Le Comportement Cinématique Des Trains ÉpicycloïdauxDocument6 pagesCI03 TD09 Sujet - Modéliser Le Comportement Cinématique Des Trains ÉpicycloïdauxIsmail El MoufakirPas encore d'évaluation
- 03 Cours Le Schema CinematiqueDocument7 pages03 Cours Le Schema CinematiqueMohammed El azhariPas encore d'évaluation
- Exercice Cotes ToleranDocument2 pagesExercice Cotes Toleransamir ghebouli100% (1)
- TD 3 StatiqueDocument18 pagesTD 3 Statiquefoufoua100% (1)
- 1-Guidage en RotationDocument5 pages1-Guidage en RotationHsjidi DjjdjdPas encore d'évaluation
- TD Cinematique CHARIOT FILOGUIDE PDFDocument4 pagesTD Cinematique CHARIOT FILOGUIDE PDFanassPas encore d'évaluation
- Cours - Génie Mécanique - Guidage en Rotation - Bac Technique (2015-2016) MR H.sabeurDocument6 pagesCours - Génie Mécanique - Guidage en Rotation - Bac Technique (2015-2016) MR H.sabeurReda Anebari100% (2)
- FC05b Statique GraphiqueDocument7 pagesFC05b Statique Graphiquepouvoir Koussou100% (1)
- TD N°3 Cinématique Du Contact PonctuelDocument4 pagesTD N°3 Cinématique Du Contact PonctuelAmine RbzPas encore d'évaluation
- SERIE TD2 - Cinematique - 2020 2021Document10 pagesSERIE TD2 - Cinematique - 2020 2021Nowe AhmadePas encore d'évaluation
- Devoir de Synthese N°2 1as Lycee Bir Lahmar Azzabi Moez-2020-2021 - 095211Document6 pagesDevoir de Synthese N°2 1as Lycee Bir Lahmar Azzabi Moez-2020-2021 - 095211Imed MoussaPas encore d'évaluation
- Devoir N2 Cotation Fonctionelle 2 As Griffe 2012Document4 pagesDevoir N2 Cotation Fonctionelle 2 As Griffe 2012haykel71Pas encore d'évaluation
- Exercice Schema CinematiqueDocument4 pagesExercice Schema CinematiqueNeji Hmani100% (2)
- TechniqueDocument8 pagesTechniqueFredj Kriaa100% (2)
- TD 1Document2 pagesTD 1hello 128Pas encore d'évaluation
- TD Vis EcrouDocument3 pagesTD Vis EcrouHoussam HadPas encore d'évaluation
- CH 5 Circuits Lineaires en Regime Sinusoidal MonophaseDocument17 pagesCH 5 Circuits Lineaires en Regime Sinusoidal Monophasekonan ezekielPas encore d'évaluation
- 8c64r Projection PDFDocument21 pages8c64r Projection PDFkhalid3mendounPas encore d'évaluation
- Technologie: Note: ./20Document3 pagesTechnologie: Note: ./20Marouen MekkiPas encore d'évaluation
- Cours Exercices TCT 1ère ST... Et 2 Ème SM-BDocument20 pagesCours Exercices TCT 1ère ST... Et 2 Ème SM-BMrnadhir MecaniquePas encore d'évaluation
- 02-Exo Schema Cinemat PerforatriceDocument2 pages02-Exo Schema Cinemat PerforatriceMohsen SaidiPas encore d'évaluation
- Correction Sujet 4Document9 pagesCorrection Sujet 4وسيم زعفوريPas encore d'évaluation
- TD20 Correction PDFDocument3 pagesTD20 Correction PDFPapa Gning100% (1)
- Exercice Cotation Fonctionnelle PDFDocument5 pagesExercice Cotation Fonctionnelle PDFNarjiss ShimiPas encore d'évaluation
- 17 TransformationDocument10 pages17 TransformationMohamed NaciriPas encore d'évaluation
- dc2 3tech 2011 2012Document7 pagesdc2 3tech 2011 2012Bouabdellaoui saif ennasrPas encore d'évaluation
- Exercices Specif CorrigeDocument8 pagesExercices Specif CorrigeSalah-eddine ZitiPas encore d'évaluation
- TD Vis EcrouDocument3 pagesTD Vis EcrouHoussam Had100% (1)
- CDC Exercices PDFDocument7 pagesCDC Exercices PDFMohamedBejjaPas encore d'évaluation
- Cours Les Liaison Mecaniques 2016 2017 (ABIDI MOURAD) (Lycée de Fériana)Document8 pagesCours Les Liaison Mecaniques 2016 2017 (ABIDI MOURAD) (Lycée de Fériana)Youssef CherniPas encore d'évaluation
- TD Palan Électrique À Chaine1Document4 pagesTD Palan Électrique À Chaine1xz4 zertoxPas encore d'évaluation
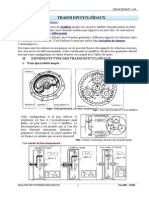
- Train Epicycloidal Simple PDFDocument4 pagesTrain Epicycloidal Simple PDFEdgar ÉtapePas encore d'évaluation
- 01 Exercice BanderoleuseDocument1 page01 Exercice BanderoleuseESSOME ESSOME OLIVIER STEPHANEPas encore d'évaluation
- STI BE - Guidage en RotationDocument14 pagesSTI BE - Guidage en Rotationmeoh eezaPas encore d'évaluation
- TD Boite de CommandeDocument2 pagesTD Boite de CommandeYoussef Trimech100% (1)
- Technologie - Bridage - 3ème Technique (2015-2016) MR Mnejja SlimDocument7 pagesTechnologie - Bridage - 3ème Technique (2015-2016) MR Mnejja Slimammiwester100% (1)
- TD CIN Graphique - Pompe A PetroleDocument3 pagesTD CIN Graphique - Pompe A Petrolesallsmart100% (1)
- Exo Cinematique PerforatriceDocument1 pageExo Cinematique PerforatriceFilaliAbderrahimPas encore d'évaluation
- Cours - Génie Mécanique - Cotation Fonctionnelle - 3ème Technique (2018-2019) MR Dhifaoui Abdelwaheb PDFDocument9 pagesCours - Génie Mécanique - Cotation Fonctionnelle - 3ème Technique (2018-2019) MR Dhifaoui Abdelwaheb PDFYounes YounssPas encore d'évaluation
- Cours EngrenagesDocument5 pagesCours EngrenagesJesuis ContentPas encore d'évaluation
- Technique CDocument8 pagesTechnique CKarim FathiPas encore d'évaluation
- Devoir de Contrôle N°2 - Technologie MEULE MANUELLE - 1ère AS (2022-2023) MR KMIMECH AdelDocument4 pagesDevoir de Contrôle N°2 - Technologie MEULE MANUELLE - 1ère AS (2022-2023) MR KMIMECH AdelAnta diama sambe100% (1)
- Cours Composition de Mouvement de Vitesse LvesDocument5 pagesCours Composition de Mouvement de Vitesse LvesziedttPas encore d'évaluation
- Schéma CinématiqueDocument22 pagesSchéma CinématiquemohamedPas encore d'évaluation
- Vé Réglable 2021Document4 pagesVé Réglable 2021hamrouniPas encore d'évaluation
- Embr 2020Document4 pagesEmbr 2020Mortadha RabahPas encore d'évaluation
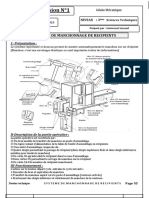
- Suj Et de Révision #1: Systeme de Manchonnage de RecipientsDocument3 pagesSuj Et de Révision #1: Systeme de Manchonnage de Recipientshamrouni100% (2)
- Technique CDocument8 pagesTechnique CAdnen BOUAZIZIPas encore d'évaluation
- Exercices - Cinmatique - Trajectoires - Camion Benne - Chariot Portuaire - Enonc PDFDocument2 pagesExercices - Cinmatique - Trajectoires - Camion Benne - Chariot Portuaire - Enonc PDFspectrum660% (1)
- 03 Exercice Roue Et Vis Sans FinDocument1 page03 Exercice Roue Et Vis Sans FinAhmed NajjarPas encore d'évaluation
- Cours 2eme Traction Et CompressionDocument5 pagesCours 2eme Traction Et CompressiondxsszszPas encore d'évaluation
- Exercices Des Trains EpicycloidauxDocument3 pagesExercices Des Trains Epicycloidauxmohamedaloui294Pas encore d'évaluation
- Icna 2011 SujetDocument26 pagesIcna 2011 SujetgtPas encore d'évaluation
- Sujetquadrirotor Icna2011Document12 pagesSujetquadrirotor Icna2011youssef sahelPas encore d'évaluation
- Examen de Conception Mecanique 2009 CorrigeDocument16 pagesExamen de Conception Mecanique 2009 Corrigebhsbhs19Pas encore d'évaluation
- Exercices d'optique et d'électromagnétismeD'EverandExercices d'optique et d'électromagnétismeÉvaluation : 5 sur 5 étoiles5/5 (1)
- StructuresDocument4 pagesStructuresImane FarrassPas encore d'évaluation
- DL 1305Document1 pageDL 1305Imane FarrassPas encore d'évaluation
- Cours 1 - Introduction À La Maintenance Et TypologieDocument32 pagesCours 1 - Introduction À La Maintenance Et TypologieFarid BenaliPas encore d'évaluation
- Cours 3-Pareto Et IshikawaDocument12 pagesCours 3-Pareto Et IshikawaAyoubPas encore d'évaluation
- Examen A Distance.Document2 pagesExamen A Distance.Imane FarrassPas encore d'évaluation
- RDM Chap 1Document23 pagesRDM Chap 1lahcen essPas encore d'évaluation
- ExamenDocument1 pageExamenImane FarrassPas encore d'évaluation
- RDM Chap 3Document15 pagesRDM Chap 3Imane FarrassPas encore d'évaluation
- ExamenDocument1 pageExamenImane FarrassPas encore d'évaluation
- Manuel Des Freins À Air CompriméDocument92 pagesManuel Des Freins À Air CompriméMirabeau Tchio Dasse100% (1)
- Chapitre 7 TrainsEngrenagesDocument17 pagesChapitre 7 TrainsEngrenagesKaram QaoubPas encore d'évaluation
- Énoncé + Solution Examen 22 Juin 2021Document7 pagesÉnoncé + Solution Examen 22 Juin 2021Hadil SellamiPas encore d'évaluation
- Clar - Vanne D'arret Et de Securite SDV - Offre Miam - Rev01 - 29.03.2019 PDFDocument7 pagesClar - Vanne D'arret Et de Securite SDV - Offre Miam - Rev01 - 29.03.2019 PDFabdelkader benabdallah100% (1)
- Modelisation DevoirDocument12 pagesModelisation DevoirPAUSE RACEPas encore d'évaluation
- B630 - Clapet PapillonDocument4 pagesB630 - Clapet Papillonoussama zairPas encore d'évaluation
- Tableau Liaison 10-11 SSIDocument2 pagesTableau Liaison 10-11 SSIMiguel Ferrer Almaraz100% (1)
- DS Micromoteur - Compresseur Clim CORRDocument1 pageDS Micromoteur - Compresseur Clim CORRAdil Hassani IdrissiPas encore d'évaluation
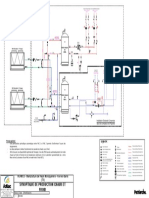
- Synoptique de ProductionDocument1 pageSynoptique de ProductionDumoutier100% (1)
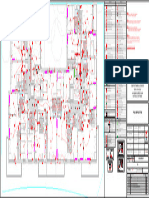
- Elec R+3Document1 pageElec R+3Yagouba WathPas encore d'évaluation
- Train ÉpicycloïdauxDocument9 pagesTrain ÉpicycloïdauxKamel Bousnina100% (1)
- Cours DC3 - M2 - Modéliser Et Schématiser Le Comportement CinématiqueDocument17 pagesCours DC3 - M2 - Modéliser Et Schématiser Le Comportement CinématiqueCh AyaPas encore d'évaluation
- td9 PSP1Document9 pagestd9 PSP1Aness SilverPas encore d'évaluation
- Dynacopumppartlist PDFDocument10 pagesDynacopumppartlist PDFnbgearsPas encore d'évaluation
- RA Rem Placement Du Roulement Pilote Du Vilebrequin (M40)Document2 pagesRA Rem Placement Du Roulement Pilote Du Vilebrequin (M40)api-3765963Pas encore d'évaluation
- Contenu Conception Automobile IIDocument3 pagesContenu Conception Automobile IIchorfi khemissiPas encore d'évaluation
- Upload - Série D'exercices N°8-3tech-Grafcet1-2013-2014Document14 pagesUpload - Série D'exercices N°8-3tech-Grafcet1-2013-2014admmehdiPas encore d'évaluation
- 24 Systeme de FreinageDocument30 pages24 Systeme de Freinageqw2jcz45pkPas encore d'évaluation
- MS02 - MSE02 Poclain A36313VDocument36 pagesMS02 - MSE02 Poclain A36313VSitecsaPas encore d'évaluation
- TD 26 Corrigé - PFS Résolution Analytique (Loi Entrée-Sortie Statique)Document12 pagesTD 26 Corrigé - PFS Résolution Analytique (Loi Entrée-Sortie Statique)Franklin DJERABEPas encore d'évaluation
- SSP 283 Partie 1 Boîte de Vitesse Automatique À 6 Rapports 09E Sur L Audi A8 03Document24 pagesSSP 283 Partie 1 Boîte de Vitesse Automatique À 6 Rapports 09E Sur L Audi A8 03ATMANE ZIDOUHPas encore d'évaluation
- Pompe Leduc CorrDocument6 pagesPompe Leduc CorrKouam kamguaingPas encore d'évaluation
- 70 - 6 - 247562FR - 1 (1) .0.0 Hidraulica M26 MANITOUDocument2 pages70 - 6 - 247562FR - 1 (1) .0.0 Hidraulica M26 MANITOURikii LuquePas encore d'évaluation
- 01 Exercice EngrenageDocument4 pages01 Exercice EngrenageEl Hâfÿîdÿî KamelPas encore d'évaluation
- Porte OutilsDocument4 pagesPorte OutilsJean-michel HuetPas encore d'évaluation
- Transmission Avec Modification de VitesseDocument6 pagesTransmission Avec Modification de VitesseMohamed aziz ben sassiPas encore d'évaluation
- PBE - EPU 04 - Equipment Enginering - ParticipantsDocument25 pagesPBE - EPU 04 - Equipment Enginering - ParticipantsHamidPas encore d'évaluation
- S - Vanne - TypesDocument21 pagesS - Vanne - Typesdaverni bourobou kombilaPas encore d'évaluation
- Travaux Diriges Pour Chapitre N2. Exercice N1Document7 pagesTravaux Diriges Pour Chapitre N2. Exercice N1Shifa JawadPas encore d'évaluation