Vous aimerez peut-être aussi
- Autodesk Inventor | étape par étape: Conception CAO et Simulation FEM avec Autodesk Inventor pour les DébutantsD'EverandAutodesk Inventor | étape par étape: Conception CAO et Simulation FEM avec Autodesk Inventor pour les DébutantsPas encore d'évaluation
- TP FiletageDocument5 pagesTP FiletageSaid Djaballah100% (2)
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesD'EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesPas encore d'évaluation
- Fusion 360 | étape par étape: Conception CAO, Simulation FEM & FAO pour les débutants. Le guide complet de la Fusion 360 d'Autodesk !D'EverandFusion 360 | étape par étape: Conception CAO, Simulation FEM & FAO pour les débutants. Le guide complet de la Fusion 360 d'Autodesk !Pas encore d'évaluation
- Le Compte RenduDocument21 pagesLe Compte Rendunajat derfoufiPas encore d'évaluation
- (Tec) (TD) Dimensionnement de RoulementsDocument4 pages(Tec) (TD) Dimensionnement de RoulementsBouba Rabeb100% (2)
- Guide PrestashopDocument189 pagesGuide PrestashopXavier Gauwin100% (2)
- Controle Acc Emb FreinDocument7 pagesControle Acc Emb FreinkhayachiPas encore d'évaluation
- Liaisons TableauDocument1 pageLiaisons Tableaubhsbhs19Pas encore d'évaluation
- Exo2 - Composition Des MouvementsDocument6 pagesExo2 - Composition Des MouvementsToufikJalalEddinePas encore d'évaluation
- Les MateriauxDocument13 pagesLes Materiauxbhsbhs19Pas encore d'évaluation
- Conception Et Réalisation D Un Hélicoptère À Rotors Coaxiaux Contrarotatifs Pour Le Concours Micro Drones ONERA DGADocument81 pagesConception Et Réalisation D Un Hélicoptère À Rotors Coaxiaux Contrarotatifs Pour Le Concours Micro Drones ONERA DGAStephane Durel Mbida100% (1)
- Procedé Soudage Mig Mag TigDocument60 pagesProcedé Soudage Mig Mag Tigbhsbhs19Pas encore d'évaluation
- Série D'exercices - Génie Mécanique - Variéte - Bac Technique (2019-2020) MR BEN AMMAR MUSTAPHADocument24 pagesSérie D'exercices - Génie Mécanique - Variéte - Bac Technique (2019-2020) MR BEN AMMAR MUSTAPHAElarbi Jaffel100% (3)
- Sicam Iset HazemDocument20 pagesSicam Iset HazemHazem AmdouniPas encore d'évaluation
- TP CAO SPE 2015-2016 v2Document17 pagesTP CAO SPE 2015-2016 v2Mohammed Amine DahbiPas encore d'évaluation
- CH1 Théorie de La CoupeDocument14 pagesCH1 Théorie de La CoupeEya Essayel100% (1)
- IDESYS Gouvernance SIDocument11 pagesIDESYS Gouvernance SIjlmarie367100% (2)
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- Train ÉpicycloidalDocument3 pagesTrain ÉpicycloidalAhmed Farahidi75% (4)
- Chapitre 2 - Méca Transf de Mvts Par Syst Bielle ManivelleDocument14 pagesChapitre 2 - Méca Transf de Mvts Par Syst Bielle Manivelleelking gingstarsPas encore d'évaluation
- TP10 Meca3D Scie SauteuseDocument3 pagesTP10 Meca3D Scie SauteuseC'est Yana100% (1)
- 191 LesengrenagesDocument8 pages191 LesengrenagesMoncef MhasniPas encore d'évaluation
- Evaluation Roulement AjustementDocument1 pageEvaluation Roulement AjustementElla Kabongo100% (2)
- CI06 TD22 Corrigé - Déterminer La Loi Entrée-Sortie D'un Train ÉpicycloïdalDocument4 pagesCI06 TD22 Corrigé - Déterminer La Loi Entrée-Sortie D'un Train ÉpicycloïdalYounes KaderPas encore d'évaluation
- Transmission de Puissance HydrauliqueDocument95 pagesTransmission de Puissance HydrauliqueSam Dallali0% (1)
- Amdec Processus PDFDocument18 pagesAmdec Processus PDFAdil Abdou100% (2)
- Examens Et TD Corrigés EngrenagesDocument14 pagesExamens Et TD Corrigés EngrenagesYOUSSEF BOUTIOUREPas encore d'évaluation
- DS2 PDFDocument8 pagesDS2 PDFAbdelilah Elmesbahi100% (1)
- Définition Et Cotation Fonctionnelle Des Pièces Mécaniques PDFDocument86 pagesDéfinition Et Cotation Fonctionnelle Des Pièces Mécaniques PDFGuy Ygal100% (1)
- Cours Gestion de Projet Partie 1Document33 pagesCours Gestion de Projet Partie 1omarPas encore d'évaluation
- Lecon D'injection Plastique Pat PDFDocument16 pagesLecon D'injection Plastique Pat PDFPatrick BeniePas encore d'évaluation
- 5-Td-Scie A BoisDocument4 pages5-Td-Scie A BoisC'est Yana100% (2)
- Essai DuriezDocument6 pagesEssai Duriezfareshassen199689% (9)
- Abaque NoiretDocument8 pagesAbaque NoirethubfaigPas encore d'évaluation
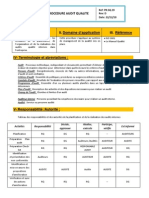
- Procedure Audit Qualite Repare 0Document2 pagesProcedure Audit Qualite Repare 0udacgPas encore d'évaluation
- TP Catia (Assemblage Moteur)Document95 pagesTP Catia (Assemblage Moteur)Semlali ZakariaPas encore d'évaluation
- Notice Quick Start Installation Chauffe Eau SauterDocument2 pagesNotice Quick Start Installation Chauffe Eau SauterBingxun WuPas encore d'évaluation
- Cahier Des Charges Fonctionnel SSI Ind 0Document36 pagesCahier Des Charges Fonctionnel SSI Ind 0Pierre SkripnikoffPas encore d'évaluation
- Contrôle de Mécanique Embrayage Frein Limiteur de CoupleDocument6 pagesContrôle de Mécanique Embrayage Frein Limiteur de CoupleMeryemHmouriPas encore d'évaluation
- TP - TambMot Concep Complet A4Document2 pagesTP - TambMot Concep Complet A4Tagne yvanPas encore d'évaluation
- Calcul Des ArbresDocument8 pagesCalcul Des ArbresKamel Bousnina100% (1)
- Chapitre 3 Calcul ArbreDocument8 pagesChapitre 3 Calcul ArbreYousif AliPas encore d'évaluation
- Comment Dimensionner Un Moto-ReducteurDocument1 pageComment Dimensionner Un Moto-ReducteurMB OPas encore d'évaluation
- PROJET DE Transmission PuissanceDocument59 pagesPROJET DE Transmission Puissancewoukouo100% (1)
- Correction de DentureDocument5 pagesCorrection de DenturetopjobPas encore d'évaluation
- TD 3 Loi Entrée Sortie Par Fermeture GéométriqueDocument4 pagesTD 3 Loi Entrée Sortie Par Fermeture GéométriqueChokri AtefPas encore d'évaluation
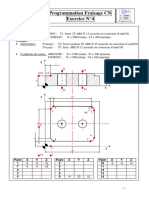
- Exercice 4Document2 pagesExercice 4Ahmed DjebbiPas encore d'évaluation
- Trains EngrenagesDocument10 pagesTrains EngrenagesZied HechmiPas encore d'évaluation
- Variateurs de VitesseDocument2 pagesVariateurs de VitesseYekini Zulle DiattaPas encore d'évaluation
- Embrayages Frein 10 11 12Document7 pagesEmbrayages Frein 10 11 12Heraiz Rachid100% (4)
- Calcul Des Roulements 2Document11 pagesCalcul Des Roulements 2NeoXana01Pas encore d'évaluation
- APPLICATIONDocument1 pageAPPLICATIONmatozo100% (1)
- Cours EngrenagesDocument5 pagesCours Engrenagessub-ka100% (1)
- CPI1 CONST TD Exercices EngrenagesDocument4 pagesCPI1 CONST TD Exercices Engrenagesyassine lakhalPas encore d'évaluation
- Chap08 MAS PDFDocument4 pagesChap08 MAS PDFCheikh Brahim Elkhadar100% (1)
- Train D'engrenageDocument13 pagesTrain D'engrenageAziza KarirPas encore d'évaluation
- TP Boite de Vitesses D'un Tour Parallèle 2014 (DR) PDFDocument6 pagesTP Boite de Vitesses D'un Tour Parallèle 2014 (DR) PDFKarim Kilani100% (2)
- Cours Guidage TranslationDocument12 pagesCours Guidage TranslationKali Abdennour0% (1)
- Thème 1 - Poulie Redex-1Document1 pageThème 1 - Poulie Redex-1Anime forever 20160% (1)
- Devoir de Maison Janvier 2021Document17 pagesDevoir de Maison Janvier 2021soulaima khederPas encore d'évaluation
- TD TRAIN EpicycloidalesDocument2 pagesTD TRAIN EpicycloidalesIlyas MhammediPas encore d'évaluation
- Potencecorrige 2Document3 pagesPotencecorrige 2spectrum66Pas encore d'évaluation
- RDM - Potence À TirantDocument2 pagesRDM - Potence À Tirantbhsbhs19Pas encore d'évaluation
- Cours - La Liaison CompleteDocument6 pagesCours - La Liaison Completeralph930% (1)
- TD Trains Epicycloidaux PDFDocument3 pagesTD Trains Epicycloidaux PDFHechmi Chermiti100% (2)
- Rondelles BellevilleDocument5 pagesRondelles BellevilleMahrez ZaafouriPas encore d'évaluation
- Guidage en Translation ProfDocument12 pagesGuidage en Translation Profslimani abdelilahPas encore d'évaluation
- Contarainte D'antérioritéDocument16 pagesContarainte D'antérioritéMajed NesrinePas encore d'évaluation
- Les Douille À Billes PDFDocument50 pagesLes Douille À Billes PDFNadia DridiPas encore d'évaluation
- Fiabilité, maintenance prédictive et vibration des machinesD'EverandFiabilité, maintenance prédictive et vibration des machinesPas encore d'évaluation
- Construction Mécanique - TD Spéciaux - MkaDocument13 pagesConstruction Mécanique - TD Spéciaux - MkaJordan Yakam0% (1)
- TD1 Complet2Document4 pagesTD1 Complet2Tafotchin KonePas encore d'évaluation
- TdengrenageDocument5 pagesTdengrenageImane FarrassPas encore d'évaluation
- Courroies Et Chaines - CalculDocument16 pagesCourroies Et Chaines - Calculbhsbhs19Pas encore d'évaluation
- Exerices Dessin Technique+corr PDFDocument18 pagesExerices Dessin Technique+corr PDFbhsbhs19100% (1)
- Lesoutilsdumanagementdelaqualite 131027160216 Phpapp01 PDFDocument37 pagesLesoutilsdumanagementdelaqualite 131027160216 Phpapp01 PDFYesminePas encore d'évaluation
- Pieces Us I NeesDocument43 pagesPieces Us I Neesbhsbhs19Pas encore d'évaluation
- Memento UsinageDocument1 pageMemento Usinagebhsbhs19Pas encore d'évaluation
- Transmission de Puissance Generalites 2011Document28 pagesTransmission de Puissance Generalites 2011bhsbhs19Pas encore d'évaluation
- CAO CroisillonDocument1 pageCAO Croisillonbhsbhs19Pas encore d'évaluation
- DM1Document5 pagesDM1bhsbhs19Pas encore d'évaluation
- RDM - Fiche - Modèles de Résistance Des Matériaux À La FlexionDocument1 pageRDM - Fiche - Modèles de Résistance Des Matériaux À La Flexionbhsbhs19Pas encore d'évaluation
- GT-I9305 QSG Open PDFDocument38 pagesGT-I9305 QSG Open PDFbhsbhs19Pas encore d'évaluation
- Transmission de PuissannceDocument1 pageTransmission de Puissanncebhsbhs19Pas encore d'évaluation
- Concours PT 2004 STIDocument15 pagesConcours PT 2004 STIbhsbhs19Pas encore d'évaluation
- Mouvements D'un SolideDocument27 pagesMouvements D'un Solidebhsbhs19Pas encore d'évaluation
- Brochures CCDocument12 pagesBrochures CCصبرين النصريPas encore d'évaluation
- STATIQUEDocument6 pagesSTATIQUEbhsbhs19Pas encore d'évaluation
- Simul InjectionDocument105 pagesSimul Injectionbhsbhs19100% (2)
- Concours PT 2000 STIDocument6 pagesConcours PT 2000 STIbhsbhs19Pas encore d'évaluation
- Prog Conversation en CNDocument1 pageProg Conversation en CNbhsbhs19Pas encore d'évaluation
- Concours PT 2006 STIDocument14 pagesConcours PT 2006 STIbhsbhs19Pas encore d'évaluation
- RDM - Potence À TirantDocument2 pagesRDM - Potence À Tirantbhsbhs19Pas encore d'évaluation
- Mecanique (EOLIENNE TRIPALE)Document12 pagesMecanique (EOLIENNE TRIPALE)Amine100% (3)
- TD-Poulie Embrayage Centrifuge PFDDocument5 pagesTD-Poulie Embrayage Centrifuge PFDbhsbhs19Pas encore d'évaluation
- SMART Sync™ 2011Document120 pagesSMART Sync™ 2011bhsbhs19Pas encore d'évaluation
- 11-Notions Graphiques - PpsDocument82 pages11-Notions Graphiques - Ppsbhsbhs19Pas encore d'évaluation
- Mecanique (EOLIENNE TRIPALE)Document12 pagesMecanique (EOLIENNE TRIPALE)Amine100% (3)
- La Maîtrise Des DélaisDocument28 pagesLa Maîtrise Des Délaishkm78Pas encore d'évaluation
- Fiche Dinscription Upab Aul PDFDocument2 pagesFiche Dinscription Upab Aul PDFkoumaPas encore d'évaluation
- Escalier SDocument5 pagesEscalier SWalid BecharPas encore d'évaluation
- D PliantDocument2 pagesD PliantAYMAN COUKIPas encore d'évaluation
- Guide Produits Parker Legris 1 PDFDocument32 pagesGuide Produits Parker Legris 1 PDFchacha_yousra100% (1)
- TP Elaboration Des Gammes Pieces PrismatiquesDocument9 pagesTP Elaboration Des Gammes Pieces PrismatiquesYahia SamahPas encore d'évaluation
- EtancheiteDocument53 pagesEtancheitemerioumaPas encore d'évaluation
- MQ22 - TP4, Flexion, Coefficient de Poisson, Module de YoungDocument6 pagesMQ22 - TP4, Flexion, Coefficient de Poisson, Module de YoungAnonymous bVFHovPas encore d'évaluation
- APP Met Emballage Metallique FDocument2 pagesAPP Met Emballage Metallique Fmohamed1101Pas encore d'évaluation
- CV Teamvidia RB SQLServerDocument8 pagesCV Teamvidia RB SQLServerAbdelsadok Yassine YoucefPas encore d'évaluation
- Rapport Stage D'initiationDocument31 pagesRapport Stage D'initiationAyoub AcharkiPas encore d'évaluation
- Syderic Catalogue Perceuses 2010Document24 pagesSyderic Catalogue Perceuses 2010imen necibPas encore d'évaluation
- Pfe Yassin V0 Version FinalDocument58 pagesPfe Yassin V0 Version Finalluko berryPas encore d'évaluation
- Amplificateur DifférentielDocument5 pagesAmplificateur DifférentielREZOPas encore d'évaluation
- Amelioration Du Service Mainte - LAAZAAR Kaoutar - 811Document69 pagesAmelioration Du Service Mainte - LAAZAAR Kaoutar - 811aliPas encore d'évaluation
- Ab Manual-FDocument81 pagesAb Manual-FHamza JadiPas encore d'évaluation
- Commo Hebdo 26 JanvierDocument24 pagesCommo Hebdo 26 JanvierAndreea PadureanPas encore d'évaluation
- UML 11 PaquetageDocument13 pagesUML 11 PaquetagedoctechPas encore d'évaluation