Vous aimerez peut-être aussi
- Validation d'APEF - Cours - CorrigéDocument5 pagesValidation d'APEF - Cours - CorrigéAziz AmtdiPas encore d'évaluation
- Vi - Transfert de Cotes Et Simulation D'usinageDocument25 pagesVi - Transfert de Cotes Et Simulation D'usinageIlu SionPas encore d'évaluation
- Formation 3D par la pratique avec C#5 et WPF: Modeliser des moleculesD'EverandFormation 3D par la pratique avec C#5 et WPF: Modeliser des moleculesPas encore d'évaluation
- Devoir de Synthèse N°3 - Génie Mécanique - Bac Technique (2011-2012) MR Ben Slimen PDFDocument5 pagesDevoir de Synthèse N°3 - Génie Mécanique - Bac Technique (2011-2012) MR Ben Slimen PDFkhocine0% (1)
- Chapitre Isostatisme (Important)Document3 pagesChapitre Isostatisme (Important)honi100% (1)
- Act (Tour Pinacho - Embrayage) P143-147 PDFDocument5 pagesAct (Tour Pinacho - Embrayage) P143-147 PDFnassim100% (1)
- Gamme CorrigéDocument2 pagesGamme CorrigéMohsen SaidiPas encore d'évaluation
- Gamme D'usinageDocument7 pagesGamme D'usinageSawssen GuidaraPas encore d'évaluation
- Chapitre 2Document18 pagesChapitre 2riad chouiterPas encore d'évaluation
- Variateur A Courroies SNTDocument3 pagesVariateur A Courroies SNTThierry LAMBOTTEPas encore d'évaluation
- Simulation D'usinageDocument12 pagesSimulation D'usinagejebril faten100% (1)
- PMOCN Doc ÉleveDocument16 pagesPMOCN Doc Élevedayzen jiffPas encore d'évaluation
- Examens Forge Corrigee (My Ensam)Document43 pagesExamens Forge Corrigee (My Ensam)Awatif BePas encore d'évaluation
- Exercices Isostatisme 2009Document4 pagesExercices Isostatisme 2009maraghni_hassine7592Pas encore d'évaluation
- Geometrie de L'outil Doc-Prof MOUKHTARI - 2Document9 pagesGeometrie de L'outil Doc-Prof MOUKHTARI - 2ELMustaphaELMoukhtari100% (1)
- Avant Projet 'Etude FabricationDocument5 pagesAvant Projet 'Etude Fabricationp bwPas encore d'évaluation
- Chapitre 7 Etude Dispresions Cotes ReglageDocument5 pagesChapitre 7 Etude Dispresions Cotes Reglagesitescompte4Pas encore d'évaluation
- Exam Ratt Forge 18 MinDocument2 pagesExam Ratt Forge 18 Minfsd vxxs100% (1)
- TP10 Meca3D Scie SauteuseDocument3 pagesTP10 Meca3D Scie SauteuseC'est Yana100% (1)
- Sujet-Janvier 2019 - Machine D'essai Mécanique PDFDocument20 pagesSujet-Janvier 2019 - Machine D'essai Mécanique PDFMrnadhir MecaniquePas encore d'évaluation
- CPAV-Ex2 Emb-Frein PDFDocument5 pagesCPAV-Ex2 Emb-Frein PDFHanane TounsiPas encore d'évaluation
- Devoir de Contrôle N°2 - Génie Mécanique - Machine À Pain - 3ème Technique (2016-2017) MR JEMAI LotfiDocument10 pagesDevoir de Contrôle N°2 - Génie Mécanique - Machine À Pain - 3ème Technique (2016-2017) MR JEMAI LotfiYoussef CherniPas encore d'évaluation
- Analyse Des Contraintes D'anterioritesDocument1 pageAnalyse Des Contraintes D'anterioritesazer kizerPas encore d'évaluation
- Chapitre 4 Contrat Des PhasesDocument5 pagesChapitre 4 Contrat Des PhasesAdel ZitouniPas encore d'évaluation
- DS1 2021-DTDocument6 pagesDS1 2021-DTramziPas encore d'évaluation
- Ds 2 15-16Document4 pagesDs 2 15-16Otman Oto100% (1)
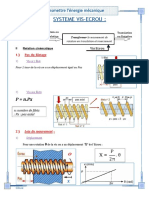
- Mecanisme de Transformation de Mouvement Systeme Vis EcrouDocument5 pagesMecanisme de Transformation de Mouvement Systeme Vis EcrouMhB SaAdPas encore d'évaluation
- Chapitre 3 Fabrication Assistée Par Ordinateur 3 - Code GDocument49 pagesChapitre 3 Fabrication Assistée Par Ordinateur 3 - Code GAs ScofPas encore d'évaluation
- Embrayages Frein 10 11 12Document8 pagesEmbrayages Frein 10 11 12Ah MédPas encore d'évaluation
- A25 Dessin Densemble Scie Sauteuse - Doc Eleve A Completer - Les CoupesDocument1 pageA25 Dessin Densemble Scie Sauteuse - Doc Eleve A Completer - Les CoupesStef TfhPas encore d'évaluation
- CorrigeDocument4 pagesCorrigeHoussamHannad100% (1)
- Devoir de Synthèse N°1 2017 2018 (MR Ghorbel Mamdouh) PDFDocument7 pagesDevoir de Synthèse N°1 2017 2018 (MR Ghorbel Mamdouh) PDFPiere EbrahimPas encore d'évaluation
- Les Tolérances GéométriquesDocument11 pagesLes Tolérances GéométriquesakouPas encore d'évaluation
- Production Mecanique: Cours deDocument111 pagesProduction Mecanique: Cours deAhmed KanounPas encore d'évaluation
- Devoir Corrigé de Contrôle N°2 - Génie Mécanique Emmeteur Terrestre (Support Orientable) - Bac Technique (2013-2014) MR Ben Abdallah Marouan PDFDocument15 pagesDevoir Corrigé de Contrôle N°2 - Génie Mécanique Emmeteur Terrestre (Support Orientable) - Bac Technique (2013-2014) MR Ben Abdallah Marouan PDFabdelbasset11Pas encore d'évaluation
- 13 Calcule Des EngrenagesDocument18 pages13 Calcule Des EngrenagesJosef Darmich100% (1)
- 2 TD AVPEF EquerreDocument1 page2 TD AVPEF EquerreRashid Elaychii100% (1)
- VE Reglable TD PDFDocument4 pagesVE Reglable TD PDFMohammed BouchelarmPas encore d'évaluation
- Bureau Des Méthodes Gam Capot PliageDocument1 pageBureau Des Méthodes Gam Capot Pliagematrani100% (1)
- TD Systèmes ArticulésDocument6 pagesTD Systèmes ArticulésAya El RhayourPas encore d'évaluation
- La Mise en Position 1ere Partie de La Norme - PROFDocument6 pagesLa Mise en Position 1ere Partie de La Norme - PROFAbdelmoghit IdhsainePas encore d'évaluation
- Mortaiseuse PDFDocument4 pagesMortaiseuse PDFOTHMAN MCHACHTIPas encore d'évaluation
- Cours 2eme Traction Et CompressionDocument5 pagesCours 2eme Traction Et CompressiondxsszszPas encore d'évaluation
- Contraintes D'antérioritéDocument3 pagesContraintes D'antérioritéjebril fatenPas encore d'évaluation
- Fiches Matieres GM S3-S4-S5 Construction & Fabrication Mecanique CFM-2019 VFDocument41 pagesFiches Matieres GM S3-S4-S5 Construction & Fabrication Mecanique CFM-2019 VFBoulehmi NizarPas encore d'évaluation
- Dimensionnement Et Choix Des VerinsDocument6 pagesDimensionnement Et Choix Des VerinsAmin ChabchoubPas encore d'évaluation
- Calculs en PliageDocument26 pagesCalculs en PliageWael MaatougPas encore d'évaluation
- CH3-Programmation PGP PDFDocument10 pagesCH3-Programmation PGP PDFahla77100% (1)
- Corrigé Mécanique T1 GP1 2021Document6 pagesCorrigé Mécanique T1 GP1 2021kara baPas encore d'évaluation
- Cours Et Exercices: Cotation Fonctionnelle I. RappelDocument6 pagesCours Et Exercices: Cotation Fonctionnelle I. RappelESSOME ESSOME OLIVIER STEPHANEPas encore d'évaluation
- AccouplementDocument32 pagesAccouplementTimo ShmittPas encore d'évaluation
- Transformtion 2021Document4 pagesTransformtion 2021Zair HafnaouiPas encore d'évaluation
- Correction EX3Document14 pagesCorrection EX3Nizar FerjaouiPas encore d'évaluation
- TP Flexion 2Document3 pagesTP Flexion 2Mrnadhir MecaniquePas encore d'évaluation
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- Fusion 360 | étape par étape: Conception CAO, Simulation FEM & FAO pour les débutants.D'EverandFusion 360 | étape par étape: Conception CAO, Simulation FEM & FAO pour les débutants.Pas encore d'évaluation
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesD'EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesPas encore d'évaluation
- HCH-FAB II - Partie 3Document16 pagesHCH-FAB II - Partie 3Fosseni DialloPas encore d'évaluation
- HCH-FAB II - Partie 3Document18 pagesHCH-FAB II - Partie 3nadiPas encore d'évaluation
- RDM Ossatures ExeossDocument87 pagesRDM Ossatures ExeossAbraham NiyongerePas encore d'évaluation
- app6-STE-STM-SMB - Destribution de TubesDocument21 pagesapp6-STE-STM-SMB - Destribution de TubesMajed NesrinePas encore d'évaluation
- Etude AMDEC de La Machine de L - CHIBOUB Badre - 561Document75 pagesEtude AMDEC de La Machine de L - CHIBOUB Badre - 561Majed NesrinePas encore d'évaluation
- 04 Méthode AMDEC PDFDocument16 pages04 Méthode AMDEC PDFenzoPas encore d'évaluation
- Rasv-Raf-13 06 2013Document67 pagesRasv-Raf-13 06 2013Majed NesrinePas encore d'évaluation
- SystèmefabricationdusavonDocument15 pagesSystèmefabricationdusavonMajed NesrinePas encore d'évaluation
- Métrologie Dimensionnelle Et SurfaceDocument47 pagesMétrologie Dimensionnelle Et SurfaceTomas Muller TipsPas encore d'évaluation
- MetrologieDocument48 pagesMetrologiehalaimia aissaPas encore d'évaluation
- Manuel TP AtelierDocument44 pagesManuel TP AtelierAnonymous 9qKdViDP4Pas encore d'évaluation
- 3 MicromètreDocument2 pages3 Micromètreعالي موسي صارPas encore d'évaluation
- Métrologie Appliquée Au MoteurDocument11 pagesMétrologie Appliquée Au MoteurAbichou IssaPas encore d'évaluation
- TP MesureDocument7 pagesTP MesureYoucef ChakamPas encore d'évaluation
- MicromètreDocument5 pagesMicromètreRaouf Belamri100% (1)
- HCH-FAB II - Partie 3Document18 pagesHCH-FAB II - Partie 3nadiPas encore d'évaluation
- Mesure Et Controle Dimensionnel - 3pagesDocument3 pagesMesure Et Controle Dimensionnel - 3pagesHamza NazihaPas encore d'évaluation
- Outillage D'entretien Et de Réparation PDFDocument43 pagesOutillage D'entretien Et de Réparation PDFHani BouaziziPas encore d'évaluation
- Mesure Avec MicrometreDocument5 pagesMesure Avec Micrometrearistor123Pas encore d'évaluation
- Leçon 4 Vérificateur de QualitéDocument19 pagesLeçon 4 Vérificateur de QualitéYasmine HammamiPas encore d'évaluation