Vous aimerez peut-être aussi
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- ds20304r1 ModelDocument14 pagesds20304r1 ModelChokri Atef50% (2)
- Examen Theorie Des Mécanismes 2016 (Solution)Document3 pagesExamen Theorie Des Mécanismes 2016 (Solution)Abdou EssamyPas encore d'évaluation
- Usinage Par Enlevement de MatiereDocument8 pagesUsinage Par Enlevement de Matieremaraghni_hassine7592Pas encore d'évaluation
- Chapitre Isostatisme (Important)Document3 pagesChapitre Isostatisme (Important)honi100% (1)
- Usinage Par Enlèvement de MatièreDocument11 pagesUsinage Par Enlèvement de MatièreMou Hamoudi100% (2)
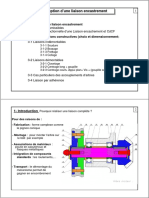
- Cours Liaison EncastrementDocument12 pagesCours Liaison Encastrementsou souPas encore d'évaluation
- Fraisage 02Document13 pagesFraisage 02Nezar DhiaPas encore d'évaluation
- Méthodologies de ConceptionDocument138 pagesMéthodologies de ConceptionAziz Tu0% (1)
- Etude de L'isostatismeDocument7 pagesEtude de L'isostatismekamal belkacemPas encore d'évaluation
- Les Machines À Commande NumériqueDocument9 pagesLes Machines À Commande NumériqueSemi ZoghlamiPas encore d'évaluation
- Promotion 2020: Les Systèmes Hydrauliques Et PneumatiquesDocument6 pagesPromotion 2020: Les Systèmes Hydrauliques Et PneumatiquesRahma BoufarhPas encore d'évaluation
- SciesauteusecorrectionDocument3 pagesSciesauteusecorrectionyumiPas encore d'évaluation
- Définition Normalisée Des Axes Numériques D'une MOCNDocument3 pagesDéfinition Normalisée Des Axes Numériques D'une MOCNhp3bpPas encore d'évaluation
- Cours-Poulies-Courroie. WordDocument26 pagesCours-Poulies-Courroie. Wordciber ramzi100% (2)
- Rapport BE1Document51 pagesRapport BE1ahmed017100% (1)
- Vitesse de Coupe Et de RotationDocument7 pagesVitesse de Coupe Et de RotationkldmntPas encore d'évaluation
- Résumé TransmettreDocument18 pagesRésumé TransmettreMehdi Ben Zouine100% (3)
- Cours EmbrayageDocument5 pagesCours EmbrayageHasibKaabi100% (1)
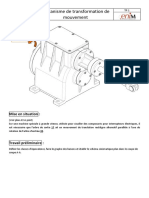
- Sujet - Mécanisme de Transformation de MouvementDocument2 pagesSujet - Mécanisme de Transformation de Mouvementhaziq ridzuanPas encore d'évaluation
- Cours FraisageDocument11 pagesCours FraisageCrazy ytPas encore d'évaluation
- Usinage Par Enlèvement de Matière Doc-ELEVE MOUKHTARI2Document10 pagesUsinage Par Enlèvement de Matière Doc-ELEVE MOUKHTARI2ELMustaphaELMoukhtariPas encore d'évaluation
- Cours CN 1-Prof V3Document24 pagesCours CN 1-Prof V3abdo tm0% (1)
- Efforts Et Puisance de CoupeDocument7 pagesEfforts Et Puisance de CoupeAnouarPas encore d'évaluation
- TP Boite de Vitesses D'un Tour Parallèle 2014 (DR) PDFDocument6 pagesTP Boite de Vitesses D'un Tour Parallèle 2014 (DR) PDFKarim Kilani100% (2)
- Exm2015-CorrigeDocument7 pagesExm2015-CorrigeToxic DEVPas encore d'évaluation
- 34 06 Outils de Coupe en Tournage PDFDocument3 pages34 06 Outils de Coupe en Tournage PDFAyoub Otasse100% (2)
- 0 - Activité 3Document6 pages0 - Activité 3Kamel TayahiPas encore d'évaluation
- TD Synthèse-TOUR SEMI-AUTOMATIQUEDocument26 pagesTD Synthèse-TOUR SEMI-AUTOMATIQUEAb HanaePas encore d'évaluation
- Rendu TP Fabrication Tour PDFDocument7 pagesRendu TP Fabrication Tour PDFIzem NumidiePas encore d'évaluation
- Qualification MGP Metrologie Dimensionnelle Et GeometriqueDocument29 pagesQualification MGP Metrologie Dimensionnelle Et GeometriqueHamza Naziha100% (1)
- Evaluation N°5 (Corrigé)Document8 pagesEvaluation N°5 (Corrigé)Wagih MrassiPas encore d'évaluation
- COMPTE RENDU (TP TOUR NUMERIQUE) Yamen Darguech CF22Document16 pagesCOMPTE RENDU (TP TOUR NUMERIQUE) Yamen Darguech CF22Salma Rekik100% (1)
- Chapitre - 2 - Avec Enlèvement de Matière - FM - 2018-2019Document41 pagesChapitre - 2 - Avec Enlèvement de Matière - FM - 2018-2019MAJDA TAHIRIPas encore d'évaluation
- Dossier Manipulation Fraiseuse PDFDocument21 pagesDossier Manipulation Fraiseuse PDFMohamed Larbi100% (1)
- 17 TransformationDocument10 pages17 TransformationMohamed NaciriPas encore d'évaluation
- TPn°1 Tournage PDFDocument17 pagesTPn°1 Tournage PDFZach LeitchPas encore d'évaluation
- Cours Techniques D'usinage AvancéesDocument79 pagesCours Techniques D'usinage AvancéesFadwa ZRPas encore d'évaluation
- Chapitre 5Document13 pagesChapitre 5Mou Héb RzPas encore d'évaluation
- EMBRAYAGETDESADocument10 pagesEMBRAYAGETDESAHafida EnnajiPas encore d'évaluation
- Cri DanDocument6 pagesCri Danmohamed1101Pas encore d'évaluation
- TD Vérin Rotatif Amorti ÉlèveDocument5 pagesTD Vérin Rotatif Amorti ÉlèveZAEKHK ZEIGZA100% (2)
- TP FMDocument15 pagesTP FMMahdiPas encore d'évaluation
- Chapitre V Tournage-4Document6 pagesChapitre V Tournage-4Aziz Kabore100% (1)
- Chapitre 7 - FraisageDocument25 pagesChapitre 7 - FraisageAlexandru Daniel GhermanPas encore d'évaluation
- TD Tournage Niveau 3Document2 pagesTD Tournage Niveau 3Iheb KahouachPas encore d'évaluation
- Rectification:: DépartementDocument5 pagesRectification:: DépartementlamrissPas encore d'évaluation
- FRAISAGEDocument34 pagesFRAISAGERazan KhPas encore d'évaluation
- 9 Acouplements PermenantsDocument10 pages9 Acouplements Permenantszouhour brahmiPas encore d'évaluation
- Liaisons Et Assemblage de Pieces Mecaniques Guidage en RotationDocument10 pagesLiaisons Et Assemblage de Pieces Mecaniques Guidage en RotationKhalil ChhataPas encore d'évaluation
- Exercices Des Trains EpicycloidauxDocument3 pagesExercices Des Trains Epicycloidauxmohamedaloui294Pas encore d'évaluation
- TP1 (Etude de Freins A Disque)Document4 pagesTP1 (Etude de Freins A Disque)zehii ghofran100% (1)
- Résumé (Torsion)Document2 pagesRésumé (Torsion)Mohsen LaabidiPas encore d'évaluation
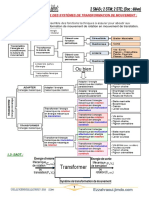
- Chapitre 0 - Introduction Aux Mécanismes de Transformations de Mouvements Sept 2020Document10 pagesChapitre 0 - Introduction Aux Mécanismes de Transformations de Mouvements Sept 2020Touhemi Ben SadokPas encore d'évaluation
- TD - Vérin Rotatif AmortiDocument5 pagesTD - Vérin Rotatif AmortiLAILA BNPas encore d'évaluation
- TP4 - Taillage D'un Pignon Par Fraise Au ModuleDocument1 pageTP4 - Taillage D'un Pignon Par Fraise Au ModuleOussama Ouafik100% (1)
- Cours TCM FinalDocument60 pagesCours TCM FinalMeryem JabranePas encore d'évaluation
- Manuel de Reference 4st Version1Document222 pagesManuel de Reference 4st Version1Zied MakkiPas encore d'évaluation
- Dafri Chayma F1Document128 pagesDafri Chayma F1Fares HDPas encore d'évaluation
- Ingénierie Mécanique - Transmission de Puissance - Tome 1 - 4e Éd.Document272 pagesIngénierie Mécanique - Transmission de Puissance - Tome 1 - 4e Éd.Jacques BONOU100% (1)
- F0rmes Usuelles VocabulairesDocument6 pagesF0rmes Usuelles VocabulairesAbdelmajid AittalebPas encore d'évaluation
- 4materiaux18 2011Document26 pages4materiaux18 2011Mahdi CherifPas encore d'évaluation
- Causes Et PAV3Document18 pagesCauses Et PAV3Abdelmajid AittalebPas encore d'évaluation
- Planning Examen 4A GC Juillet 2020Document1 pagePlanning Examen 4A GC Juillet 2020Abdelmajid AittalebPas encore d'évaluation
- Mini-Projet - Structure AeroglisseurDocument42 pagesMini-Projet - Structure AeroglisseurAbdelmajid AittalebPas encore d'évaluation
- Vincent Rainbold THESE - Finale - 1122014 PDFDocument204 pagesVincent Rainbold THESE - Finale - 1122014 PDFRebahi FaresPas encore d'évaluation
- AbdelDocument5 pagesAbdelAbdelmajid AittalebPas encore d'évaluation
- TD 2 Chaines de CotesDocument2 pagesTD 2 Chaines de CotesAbdelmajid AittalebPas encore d'évaluation
- DESCRIPTIF DU MODULE - CPI25 - Construction Mecanique 2Document4 pagesDESCRIPTIF DU MODULE - CPI25 - Construction Mecanique 2Abdelmajid AittalebPas encore d'évaluation
- TD 1 Chaines de CotesDocument4 pagesTD 1 Chaines de CotesAbdelmajid AittalebPas encore d'évaluation
- TD 1 Chaines de CotesDocument4 pagesTD 1 Chaines de CotesAbdelmajid AittalebPas encore d'évaluation
- 122 p17Document5 pages122 p17Ali TrikiPas encore d'évaluation
- TD 2 Chaines de CotesDocument2 pagesTD 2 Chaines de CotesAbdelmajid AittalebPas encore d'évaluation
- Premier TexDocument1 pagePremier TexAbdelmajid AittalebPas encore d'évaluation
- Liaisons GlissieresDocument65 pagesLiaisons GlissieresImen HammoudaPas encore d'évaluation
- Apprends LatexDocument112 pagesApprends LatexJLALPas encore d'évaluation
- AbdoDocument2 pagesAbdoAbdelmajid AittalebPas encore d'évaluation
- Trans MecaniquesDocument147 pagesTrans MecaniqueschamraphPas encore d'évaluation
- SPM2 Resistance Des Materiaux 2010 2011 PDFDocument56 pagesSPM2 Resistance Des Materiaux 2010 2011 PDFSamir KhPas encore d'évaluation
- ModélisationslaisonsDocument14 pagesModélisationslaisonsAbdelmajid AittalebPas encore d'évaluation
- Cours Liaison GlissiereDocument23 pagesCours Liaison GlissiereAbdelmajid AittalebPas encore d'évaluation
- SPM2 Resistance Des Materiaux 2010 2011 PDFDocument56 pagesSPM2 Resistance Des Materiaux 2010 2011 PDFSamir KhPas encore d'évaluation
- 122 p17Document5 pages122 p17Ali TrikiPas encore d'évaluation
- Beamer Loic 2008Document19 pagesBeamer Loic 2008Abdelmajid AittalebPas encore d'évaluation
- Trans MecaniquesDocument147 pagesTrans MecaniqueschamraphPas encore d'évaluation
- Chaine FonctionnelleDocument30 pagesChaine FonctionnelleAbdelmajid AittalebPas encore d'évaluation
- Cours de Élément MachinesDocument110 pagesCours de Élément MachinesLyricX OnePas encore d'évaluation
- Conditionneuse Medicament SadtDocument4 pagesConditionneuse Medicament SadtAbdelmajid AittalebPas encore d'évaluation
- Compte Rendu TPDocument11 pagesCompte Rendu TPAbdelmajid AittalebPas encore d'évaluation
- Application CapteursDocument2 pagesApplication CapteursAbdelmajid AittalebPas encore d'évaluation
- Chapitre II: FlambementDocument6 pagesChapitre II: Flambementرشاد صيفانPas encore d'évaluation
- Equations de LagrangeDocument31 pagesEquations de LagrangekamelPas encore d'évaluation
- Tpe EmbrayageDocument24 pagesTpe EmbrayageGuillaume WoukouoPas encore d'évaluation
- RLC Libre COURSDocument27 pagesRLC Libre COURSmehdi benmassoudPas encore d'évaluation
- Mémoire de Fin D'étude (Enregistré Automatiquement) PDFDocument8 pagesMémoire de Fin D'étude (Enregistré Automatiquement) PDFFarida DehriPas encore d'évaluation
- EXP-MN-SI020-FR-R0 - Mesures en Instrumentation PDFDocument118 pagesEXP-MN-SI020-FR-R0 - Mesures en Instrumentation PDFlotfidk21100% (2)
- MEMOIRE CISSE Version Finle PDFDocument66 pagesMEMOIRE CISSE Version Finle PDFTié Bi Gohi RichardPas encore d'évaluation
- Exercices de Béton PrécontraintDocument11 pagesExercices de Béton Précontraintgueyetapha7785% (13)
- Champ Spire Et SolenoideDocument11 pagesChamp Spire Et SolenoidethekrumpPas encore d'évaluation
- Etude Numerique Du Jet Turbulent A Masse Volumique Variable: B. Imine, O. Imine, B. Sarh, I. GökalpDocument7 pagesEtude Numerique Du Jet Turbulent A Masse Volumique Variable: B. Imine, O. Imine, B. Sarh, I. Gökalpmaya ben mahmoudPas encore d'évaluation
- DS TP Poinconneuse SsflambDocument2 pagesDS TP Poinconneuse Ssflambloic le cot100% (1)
- Mec1210 2021Document46 pagesMec1210 2021Elaziouti AbdelkaderPas encore d'évaluation
- TD2 Cinematique de Solide Beinsciences 2023 2024Document10 pagesTD2 Cinematique de Solide Beinsciences 2023 2024Khalid El100% (1)
- Suspension MotoDocument12 pagesSuspension Motohenri100% (1)
- Cours1 StatiqueDocument20 pagesCours1 StatiqueOmar MbarekPas encore d'évaluation
- FinalDocument74 pagesFinalTPN2608100% (1)
- Progression Machines PF3Document5 pagesProgression Machines PF3Ferdinand SEMEPas encore d'évaluation
- Cours Lois Mecanique Outils 1 PDFDocument13 pagesCours Lois Mecanique Outils 1 PDFPatient AndressPas encore d'évaluation
- 3-Pressions de Terrain1Document68 pages3-Pressions de Terrain1Nada Kobi100% (1)
- Simulation Numerique Effet de Tremblement de Terre PDFDocument216 pagesSimulation Numerique Effet de Tremblement de Terre PDFOum NadirPas encore d'évaluation
- Mini ProjetDocument27 pagesMini ProjetMouhcine AminiPas encore d'évaluation
- Analyse D'une Dipôle RL - SuperprofDocument17 pagesAnalyse D'une Dipôle RL - Superprofالغزيزال الحسن EL GHZIZAL HassanePas encore d'évaluation
- AssemblageDocument15 pagesAssemblageABDPas encore d'évaluation
- Cinématique Analytique: Mouvement de Translation Rectiligne UniformeDocument4 pagesCinématique Analytique: Mouvement de Translation Rectiligne UniformececePas encore d'évaluation
- Chapitre3.Dimensionnement Des Sections Soumises Aux Actions CentréesDocument19 pagesChapitre3.Dimensionnement Des Sections Soumises Aux Actions Centréeskonan kouassi martialPas encore d'évaluation
- Tenseur Des Déformations LinéariséDocument3 pagesTenseur Des Déformations LinéariséAnass EL BOUSSAIDIPas encore d'évaluation
- Bounoua, TinhinaneDocument335 pagesBounoua, TinhinaneHamza HalhouliPas encore d'évaluation
- Joint de Cardan TDDocument4 pagesJoint de Cardan TDLaadim MarouanePas encore d'évaluation
- Chapitre 4.dimensionnement Du Réseau ProjetéDocument11 pagesChapitre 4.dimensionnement Du Réseau Projetéjust ANDROIDPas encore d'évaluation
- 6FX2001-5WP12 Datasheet FR en PDFDocument2 pages6FX2001-5WP12 Datasheet FR en PDFGrin GoPas encore d'évaluation
- Théorie relative de la musique: Maîtriser le mouvement par la logique des intervallesD'EverandThéorie relative de la musique: Maîtriser le mouvement par la logique des intervallesÉvaluation : 4 sur 5 étoiles4/5 (1)
- Harmonisation Energétique des Personnes: Manuel de Curothérapie 2020D'EverandHarmonisation Energétique des Personnes: Manuel de Curothérapie 2020Évaluation : 4 sur 5 étoiles4/5 (8)
- L'Ombre à l'Univers: La structure des particules élémentaires XIIfD'EverandL'Ombre à l'Univers: La structure des particules élémentaires XIIfPas encore d'évaluation
- Un régime quantiqueD'EverandUn régime quantiqueÉvaluation : 5 sur 5 étoiles5/5 (1)
- Le profilage au service du football: Démarche scientifique pour un recrutement et entraînements optimisésD'EverandLe profilage au service du football: Démarche scientifique pour un recrutement et entraînements optimisésPas encore d'évaluation
- Chevaux de Fer - Locomotives Agricoles et Tracteurs LégendairesD'EverandChevaux de Fer - Locomotives Agricoles et Tracteurs LégendairesPas encore d'évaluation
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsD'EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsÉvaluation : 5 sur 5 étoiles5/5 (1)
- le Phoenix de nos âmes: Les lois énergétiques de la lumière divineD'Everandle Phoenix de nos âmes: Les lois énergétiques de la lumière divinePas encore d'évaluation
- La pensée dirigée: Traité sur le raisonnement et les logiquesD'EverandLa pensée dirigée: Traité sur le raisonnement et les logiquesÉvaluation : 5 sur 5 étoiles5/5 (2)
- Physique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresD'EverandPhysique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresÉvaluation : 5 sur 5 étoiles5/5 (2)
- Voyager à Travers les Mondes Parallèles pour Atteindre vos RêvesD'EverandVoyager à Travers les Mondes Parallèles pour Atteindre vos RêvesÉvaluation : 4 sur 5 étoiles4/5 (11)
- L'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.D'EverandL'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.Pas encore d'évaluation
- Bioénergie et Sciences Occultes: Pour un corps sain et un esprit sain dans un lieu sainD'EverandBioénergie et Sciences Occultes: Pour un corps sain et un esprit sain dans un lieu sainÉvaluation : 4 sur 5 étoiles4/5 (2)
- La Conscience Et L'Univers Existent Sans Commencement Ni FinD'EverandLa Conscience Et L'Univers Existent Sans Commencement Ni FinPas encore d'évaluation
- Sur les fondements de la théorie des ensembles transfinisD'EverandSur les fondements de la théorie des ensembles transfinisPas encore d'évaluation
- Voyage au-delà du corps: L'exploration de nos Univers intérieursD'EverandVoyage au-delà du corps: L'exploration de nos Univers intérieursÉvaluation : 4.5 sur 5 étoiles4.5/5 (20)
- Signe pour le Saint Graal? Énergie infinie avec des possibilités infinies! Mesurer avec l’antenne de Lecher à Carnac et en Bretagne en FranceD'EverandSigne pour le Saint Graal? Énergie infinie avec des possibilités infinies! Mesurer avec l’antenne de Lecher à Carnac et en Bretagne en FrancePas encore d'évaluation