Académique Documents
Professionnel Documents
Culture Documents
SCD T 2008 0094 Martinez-Martinez
Transféré par
Krasic MilosTitre original
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
SCD T 2008 0094 Martinez-Martinez
Transféré par
Krasic MilosDroits d'auteur :
Formats disponibles
AVERTISSEMENT
Ce document est le fruit d'un long travail approuv par le
jury de soutenance et mis disposition de l'ensemble de la
communaut universitaire largie.
Il est soumis la proprit intellectuelle de l'auteur. Ceci
implique une obligation de citation et de rfrencement lors
de lutilisation de ce document.
Toute contrefaon, plagiat, reproduction illicite encourt une
poursuite pnale.
Contact SCD Nancy 1 : theses.sciences@scd.uhp-nancy.fr
LIENS
Code de la Proprit Intellectuelle. articles L 122. 4
Code de la Proprit Intellectuelle. articles L 335.2- L 335.10
http://www.cfcopies.com/V2/leg/leg_droi.php
http://www.culture.gouv.fr/culture/infos-pratiques/droits/protection.htm
Universite Henri Poincare Nancy I Centre de Recherche en Automatique de Nancy
Analyse des proprietes structurelles
dobservabilite de letat et de lentree
inconnue des syst`emes lineaires par
approche graphique
TH
`
ESE
presentee et soutenue publiquement le 27 mai 2008
pour lobtention du
Doctorat de luniversite Henri Poincare Nancy 1
(specialite Automatique)
par
Sinuhe Martnez Martnez
Composition du jury
Rapporteurs : Pr. Olivier SENAME
Dr. Mohamed DJEMAI
Examinateurs : Pr. Efrain ALCORTA GARC
IA
Pr. Didier MAQUIN
Directeurs de th`ese : Pr. Frederic HAMELIN
Dr. Taha BOUKHOBZA
Departement de formation doctorale en Automatique
Ecole doctorale IAEM Lorraine
UFR STMIA
Mis en page avec la classe thloria.
Table des mati`eres
Chapitre 1 Introduction 3
1.1 Syst`emes lineaires structures . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.1.1 Proprietes generiques . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.1.2 Rang generique dune matrice structuree . . . . . . . . . . . . . . . 10
1.2 Representation graphique des syst`emes lineaires structures . . . . . . . . . 11
1.2.1 Graphe oriente associe `a un syst`eme lineaire structure . . . . . . . . 12
1.2.2 Notations et denitions . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.2.3 Graphe biparti associe `a un syst`eme lineaire structure . . . . . . . . 17
1.3 Les problematiques abordees dans ce travail . . . . . . . . . . . . . . . . . 18
Chapitre 2 Observabilite generique de letat et de lentree des syst`emes
lineaires structures 23
2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.2 Observabilite totale de letat et de lentree dun syst`eme lineaire structure . 25
2.2.1 Position du probl`eme . . . . . . . . . . . . . . . . . . . . . . . . . . 26
2.2.2 Subdivision du syst`eme lineaire structure . . . . . . . . . . . . . . . 27
2.2.3 Conditions dobservabilite totale de lentree et de letat . . . . . . . 33
2.3 Observabilite partielle de letat et de lentree dun syst`eme lineaire structure 44
2.3.1 Position du probl`eme . . . . . . . . . . . . . . . . . . . . . . . . . . 44
2.3.2 Denitions et notations . . . . . . . . . . . . . . . . . . . . . . . . . 45
2.3.3 Condition dobservabilite dun ensemble donne de composantes de
letat et de lentree . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
2.3.4 Observabilite forte de letat dun syst`eme lineaire structure . . . . 55
2.4 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
1
2
Chapitre 3 Placement de capteurs pour le recouvrement de lobservabilite
forte ou dune partie de letat et de lentree 61
3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
3.2 Placement de capteurs pour le recouvrement de lobservabilite forte dune
partie de letat dun syst`eme . . . . . . . . . . . . . . . . . . . . . . . . . . 62
3.2.1 Position du Probl`eme . . . . . . . . . . . . . . . . . . . . . . . . . . 63
3.2.2 Recouvrement de la condition de connectivite ` a la sortie . . . . . . 64
3.2.3 Recouvrement de la condition . . . . . . . . . . . . . . . . . . . 67
3.3 Placement de capteurs pour le recouvrement de lobservabilite forte . . . . 71
3.3.1 Position du probl`eme . . . . . . . . . . . . . . . . . . . . . . . . . . 72
3.3.2 Recouvrement de la condition de connectivite ` a la sortie . . . . . . 73
3.3.3 Recouvrement de la condition de couplage . . . . . . . . . . . . . . 74
3.3.4 Recouvrement de la condition de distance . . . . . . . . . . . . . . 77
3.4 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
Chapitre 4 Bote `a outils danalyse structurelle LISA et divers aspects
algorithmiques 83
4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
4.2 Description generale de lisa . . . . . . . . . . . . . . . . . . . . . . . . . 84
4.3 Algorithmes de base de LISA . . . . . . . . . . . . . . . . . . . . . . . . . 87
4.4 Algorithmes pour lanalyse des proprietes dobservabilite et de diagnosti-
cabilite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
4.4.1 Implementation de lanalyse de lobservabilite de letat et de lentree 96
4.4.2 Detectabilite et localisabilite des defauts . . . . . . . . . . . . . . . 97
4.5 Perspectives et algorithmes implementables ` a court terme dans LISA . . . 101
4.5.1 Observabilite forte de tout letat . . . . . . . . . . . . . . . . . . . . 102
4.5.2 Observabilite forte dune partie donnee de lentree et de letat . . . 102
4.5.3 Placement de capteurs pour lobservabilite forte de tout letat . . . 104
4.5.4 Placement de capteurs pour lobservabilite partielle . . . . . . . . . 104
4.5.5 Implementation doutils danalyse dautres proprietes structurelles 105
4.6 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
Chapitre 5 Conclusions 107
Bibliographie 111
1
Introduction
Lobjectif assez classique de la theorie de lautomatique est la synth`ese de schemas
de commande, dobservation, de diagnostic ou de supervision an de rendre un syst`eme
plus performant, plus s ur, plus able, plus durable et plus aise `a matriser. Une etape im-
portante prealable ` a toute synth`ese est lanalyse du syst`eme ` a considerer. Cette analyse
permet de mieux connatre le syst`eme, ses limites et ses capacites. Elle est fondee sur le-
tude de diverses caracteristiques de ce syst`eme. Parmi ces proprietes, les plus importantes
sont la commandabilite, lobservabilite, les rangs, les zeros ou la structure de certaines
matrices particuli`eres, les dimensions de certains sous-espaces. . . qui peuvent traduire la
solvabilite totale ou partielle de plusieurs probl`emes fondamentaux dautomatique.
Ainsi, divers crit`eres de commandabilite, dobservabilite ou de solubilite de probl`emes de
decouplage, rejet de perturbations, de detection et localisation de defauts ont ete etablis
et font partie des connaissances de base en automatique. Ces crit`eres sont pour la majorite
dentre eux fondes sur des approches algebriques ou geometriques [Zadeh et Desoer, 1963,
Rosenbrock, 1970, Kailath, 1980, Wonham, 1985] sexprimant donc par des conditions de
rang de matrices ou de dimension de sous-espaces vectoriels. En eet, la representation la
plus usuelle des syst`emes lineaires reste la representation detat ou celle par fonctions et
matrices de transfert. Il sest avere que, lors de lanalyse dun syst`eme lineaire numerique-
ment specie, un grand nombre de caracteristiques dependent plus de la structure du
3
4
syst`eme proprement dite que des valeurs des dierents param`etres constituant les matri-
ces de la representation detat par exemple. Il est alors judicieux detudier ces proprietes
en considerant le syst`eme sans valeur numerique precise des param`etres. Letude de ce
type de syst`emes dits structures ne necessite alors que la connaissance de la repartition
des elements nuls/non-nuls dans les diverses matrices de sa representation. Il est alors
possible de traiter les syst`emes non-species numeriquement ou non compl`etement spe-
cies, en phase de conception ou encore les syst`emes incertains par exemple. Ce type
detude permet de mieux degager les proprietes structurelles en se concentrant non plus
sur une realisation donnee par une combinaison numerique xe des param`etres mais sur
la structure du syst`eme denie en grande partie par lexistence ou non des interactions
entre les variables qui le caracterisent. De plus, lanalyse ainsi menee permet detudier les
syst`emes d`es leur phase de conception.
Evidemment, Cette analyse nautorise pas letude
des proprietes importantes telles que la stabilite qui est tr`es liee justement `a la valeur des
param`etres.
[Lin, 1974] est la toute premi`ere etude par approche graphique relative ` a la command-
abilite des syst`emes structures qui sont caracterises par une representation detat o` u toutes
les matrices ont, soit des elements nuls xes, soit des elements non nuls symbolises par
des param`etres supposes independants. Le syst`eme lineaire est represente par un graphe
oriente et les conditions de commandabilite sont exprimees de fa con tr`es simple et intu-
itive : existence de cycles, de chemins formant des cactus . . . .
Lelegance, loriginalite et la simplicite des resultats obtenus dans [Lin, 1974]
ont encourage dautres etudes sur lanalyse structurelle par approche graphique.
Ainsi, les proprietes structurelles de commandabilite, observabilite, la caracterisa-
tion graphique de certains sous-espaces invariants, le rang generique des fonctions
de transfert, la structure ` a linni ainsi que le nombre generique de dierents types
de zeros des syst`emes structures ont ete graphiquement caracterises. Plus tard des
conditions de solubilite des probl`emes classiques de decouplage [Linnemann, 1981,
Chapitre 1. Introduction 5
Yamada et Saga, 1985, Dion et Commault, 1993, Commault et al., 1999], de rejet de per-
turbations par retour detat [van der Woude et Murota, 1995, Commault et al., 1991] ou
par retour de sortie [van der Woude, 1996, Commault et al., 1993, Commault et al., 1997,
van der Woude, 1993, Dion et al., 1994] et de generation de residus pour la detection et
la localisation de defauts [Commault et al., 2002a] ont ete etablis.
Les avantages de la representation graphique des syst`emes structures ont ete mis en ex-
ergue d`es les travaux de [Lin, 1974]. En eet, les graphes, en contenant toute linformation
du mod`ele structure, permettent de mieux visualiser certaines proprietes du syst`eme. L-
expression de divers resultats danalyse est alors tr`es simple, intuitive et (parfois) elegante
[Andre, 1985, Murota, 1987, Reinschke, 1988]. Enn, la verication de ces proprietes fait
appel ` a des algorithmes classiques de la theorie des graphes dont les ordres de complexite
restent polynomiaux et non exponentielx. Cela permet notamment detudier des syst`emes
de grande dimension et ce d`es la phase de conception.
Dans ce memoire de th`ese nous nous consacrons `a lanalyse graphique de cer-
taines proprietes liees ` a lobservabilite de letat et des entrees de syst`emes lineaires
structures ` a entrees inconnues. Les entrees et letat dun syst`eme sont generiquement
observables lorsque ce dernier est simultanement fortement observable et inversible
` a gauche [Trentelman et al., 2001]. Les conditions geometriques ou algebriques, pour
la validite de ces proprietes sont analysees notamment dans [Sain et Massey, 1969,
Silverman, 1969, Basile et Marro, 1969, Guidorzi et Marro, 1971, Basile et Marro, 1973,
Basile et al., 1981, Hautus, 1983, Kratz, 1995, Hou et Patton, 1998]. Comme le montre le
nombre de ces references (parmi tant dautres), ces proprietes ont ete tr`es etudiees, en
particulier dans lobjectif dune synth`ese dobservateurs ` a entrees inconnues et/ou dune
reconstruction dentrees inconnues.
Lobservation conjointe de letat et des entrees inconnues est dailleurs encore un su-
jet detude ouvert comme en temoignent les recentes publications dans le domaine. Ainsi,
[Floquet et Barbot, 2006] demontrent que tout syst`eme fortement observable et inversible
` a gauche se met sous une forme dobservabilite particuli`ere, puis un observateur `a modes
6
glissants est suggere pour une telle forme.
Dans le travail realise dans cette th`ese, nous ne nous sommes pas interesses ` a la synth`ese
dobservateurs mais plut ot aux conditions structurelles dobservabilite de tout ou dune
partie choisie de letat et des entree. La premi`ere question ` a laquelle nous avons repondu, ` a
partir de la representation dun syst`eme structure par un graphe oriente, est : les mesures
contiennent-elles susamment dinformation pour permettre de reconstruire, du moins
theoriquement, les variables inconnues du syst`eme ? De mani`ere equivalente, est-il pos-
sible dexprimer tout ou une partie des entrees et de letat du syst`eme uniquement en
fonction des mesures et de leurs derivees ?
Des reponses ` a cette question avaient ete donnees, evidemment, par des etudes utilisant des
outils algebriques et geometriques. Neanmoins, cela pas encore ete realise par lapproche
graphique, qui setait arretee ` a la caracterisation de lobservabilite classique de letat pour
des syst`emes sans entree inconnue. Notons que les conditions graphiques dexistence dun
observateur causal `a entrees inconnues permettant destimer letat dun syst`eme lineaire
avec une dynamique de lerreur destimation independante des entrees inconnues ont ete
donnees dans [Commault et al., 2001]. Elles sont logiquement plus restrictives que les con-
ditions dobservabilite de letat et de lentree.
Nos recherches ont abouti ` a letablissement de conditions graphiques necessaires et su-
isantes de lobservabilite de tout ou dune partie donnee de letat et des entrees inconnues
dun syst`eme lineaire structure.
Le second probl`eme que nous avons aborde est celui du placement de capteurs qui perme-
ttrait le recouvrement de lobservabilite dune partie desiree des entrees et de letat dun
syst`eme structure. Deux principales approches sont employees dans la litterature pour
traiter le probl`eme general du placement de capteurs. La premi`ere concerne lutilisation de
techniques doptimisation dun crit`ere reetant un grammien dobservabilite ou des fonc-
tions de sensibilite . . . . Elle a fait lobjet de plusieurs travaux dont certains sont rapportes
dans [van de Wal et de Jager, 2001, Demetriou, 2005, Khosrowjerdi et al., 2007]. La sec-
onde regroupe des etudes plus structurelles telles que [Liu et al., 2003, Ragot et al., 1992,
Maquin et al., 1994, Meyer et al., 1994] qui presente une strategie de placement de cap-
Chapitre 1. Introduction 7
teurs et dactionneurs dans lobjectif de garantir des proprietes telles que linversibilite
. . . .
Letude menee ici peut etre vue comme lextension aux syst`emes ` a entrees inconnues de
[Commault et al., 2005b] qui traitent des conditions graphiques de placement de capteurs
pour le recouvrement de la propriete dobservabilite dun syst`eme sans entrees inconnues.
En fait, il sagit de proposer une strategie de placement de capteurs reposant enti`ere-
ment sur la structure du syst`eme et qui permettrait, dans un premier temps, de rendre
observables letat et les entrees du syst`eme. Ce probl`eme reste original par rapport `a
ceux precedemment cites en raison de la presence des entrees inconnues qui ne sont pas
supposees constantes ou lentement variables. Deux groupes de conditions sur les capteurs
additionnels ont ete etablis. Les premi`eres conditions sont necessaires et les secondes,
enoncees sous forme dun syst`eme de relations graphiques, sont susantes.
Enn, an de rendre plus concret lapport de lanalyse structurelle par approche
graphique que nous proposons, il a ete important, dimplementer tous les resultats trouves
et meme tous ceux disponibles dans la litterature pour mettre `a disposition de la commu-
naute un outil danalyse structurelle pertinent pour les syst`emes lineaires et bilineaires.
La bote `a outils lisa a ete concue dans cet esprit. Elle dispose pour linstant des outils
de base et comprend quelques implementations de resultats sur lobservabilite.
Plus precisement, lisa est une bote `a outils danalyse structurelle graphique dediee aux
syst`emes lineaires et bilineaires structures [Martinez-Martinez et al., 2007]. Elle a comme
objectif detre utilisee pour lanalyse et la conception de syst`emes de grande dimension.
Une attention particuli`ere a ete portee sur loptimalite de laspect calculatoire, evolutivite,
modularite, portabilite et convivialite.
8 1.1. Syst`emes lineaires structures
1.1 Syst`emes lineaires structures
Nous etudions les proprietes structurelles des syst`emes lineaires invariant dans le temps
de la forme :
_
_
_
x(t) = Ax(t) + Bu(t)
y(t) = Cx(t) + Du(t)
(1.1)
o` u x(t) R
n
represente le vecteur detat du syst`eme, u(t) R
q
le vecteur des entrees
et y(t) R
p
le vecteur des sorties. A, B, C et D sont des matrices de dimension appropriee.
Nous supposons que seule est connue la structure du syst`eme, cest ` a dire lexistence ou
non de relations entre les dierentes variables du syst`eme. Lorsquil ny a pas de relation
entre les variables, nous inscrivons une valeur zero dans lelement correspondant de la
matrice, tandis que lexistence dune relation est traduite par un element non nul dans la
matrice materialisee par un param`etre reel. Les syst`emes ainsi parametres peuvent etre
representes par le syst`eme lineaire structure denote
decrit comme suit :
_
_
_
x(t) = A
x(t) + B
u(t)
y(t) = C
x(t) + D
u(t)
(1.2)
o` u les matrices A
, B
, C
, D
du syst`eme structure
sont des matrices dites structurees.
Les param`etres sont rassembles dans le vecteur =
1
,
2
, ...,
k
. Les param`etres du
vecteur ne presentent aucune relation commune entre eux et sont dits independants.
Ces syst`emes structures peuvent representer une grande categorie de syst`emes lineaires
numeriquement species.
Il faut noter quici nous considerons les elements zeros des matrices comme etant
xes. Dautres approches consid`erent le cas o` u ces valeurs peuvent etre dierentes de
zero en raison precisement des incertitudes du syst`eme. Cest notamment le cas lorsque
ces zeros proviennent de la dierence de deux valeurs a priori connues et xent. Cest
egalement le cas en ce qui concerne certains param`etres libres, lorsque des composantes
du vecteur detat impliquent certaines valeurs xes constantes dans la matrice. Cest le
cas dune relation de type x
1
(t) = x
2
(t), par exemple. Ces deux cas sont consideres dans
[Willems, 1986, Murota, 1987].
Chapitre 1. Introduction 9
Dans certaines parties de ce memoire, nous aurons ` a manipuler syst`emes lineaires
representes par des matrices polynomiales. Cela aidera `a mieux analyser leur structure.
Ainsi, au syst`eme lineaire structure (1.2), il peut etre associe une matrice polynomiale
P
(s) =
_
_
A
sI
n
B
_
_
(1.3)
appelee faisceau de matrices du syst`eme
. Cette matrice contient une grande partie de
linformation importante relative ` a la structure du syst`eme.
1.1.1 Proprietes generiques
Lun des avantages de lanalyse des proprietes des syst`emes lineaires structures est
la genericite des resultats obtenus. En eet, la validite des proprietes telles que la com-
mandabilite, lobservabilite, est vraie non seulement pour une combinaison donnee des
param`etres du syst`eme, mais aussi pour presque toutes les valeurs quils peuvent prendre.
Ces proprietes, dites structurelles car liees `a la structure du syst`eme, ont ainsi une validite
generique par rapport aux valeurs des param`etres.
Il faut noter que laspect generique des proprietes structurelles par rapport aux param`etres
du syst`eme nimplique en rien leur validite pour toutes les combinaisons numeriques pos-
sibles des param`etres. Cest par exemple le cas pour lobservabilite du syst`eme lineaire
structure suivant ayant par entree connue u(t)
x(t) =
_
_
1
0
0
2
_
_
x(t) +
_
_
6
_
_
u(t)
y(t) =
_
3
4
_
x(t)
(1.4)
La matrice dobservabilite est donnee par O =
_
_
C
CA
_
_
o` u
O =
_
_
3
4
3
2
4
_
_
10 1.1. Syst`emes lineaires structures
Le syst`eme est observable si le rang de la matrice O est egal ` a 2, cest ` a dire ` a la dimension
du syst`eme. Le determinant etant donne par
det (O) =
2
4
(
2
1
)
le syst`eme est donc observable pour toute valeur des param`etres
1
,
2
,
3
,
4
sauf pour
3
= 0 ou
4
= 0 ou
2
1
= 0. Ainsi, le syst`eme (1.4) est observable pour presque
toutes les valeurs de . Dans le cas des syst`emes lineaires structures, il est considere que
le syst`eme donne par lequation (1.4) est generiquement observable.
Nous avons parle ci-dessus de la propriete dobservabilite, mais aussi du rang dune
matrice. Le rang generique dune matrice structuree est une notion importante dans ce
travail de th`ese. Le paragraphe suivant approfondit cette notion.
1.1.2 Rang generique dune matrice structuree
Dans le cas des syst`emes numeriquement species, le rang du faisceau de matrices
P(s) est le nombre maximal de lignes ou colonnes lineairement independantes que lon
peut avoir dans cette matrice. Pour une valeur complexe particuli`ere s, le rang de P( s)
est naturellement note rang(P( s)). Le rang normal du faisceau P(s) est alors le rang de
P( s) pour presque toutes les valeurs de s C et il est denote par n-rang(P(s)).
Dans le cadre des syst`emes lineaires structures, ` a chaque valeur de lensemble des
param`etres R
k
, il est possible dassocier un syst`eme numeriquement specie et une
valeur du rang de la matrice de transfert du syst`eme. De la section 1.1.1, nous savons que le
rang de la matrice de transfert de tous ces syst`emes species nest pas toujours egal au rang
normal puisquil depend des param`etres. Denissons la matrice de transfert du syst`eme
structure comme T
(s) = C
(sI A
)
1
B
+D
et assumons que rang(T
(s)) = q. La de-
nition suivante precise la notion de rang generique [van der Woude, 1991, van der Woude, 1991].
Denition 1.1. Soit
un syst`eme lineaire structure avec pour matrice de transfert
T
(s) = C
(sI A
)
1
B
+ D
. Le rang generique, note g-rang, de T
(s) est deni
Chapitre 1. Introduction 11
comme
g-rang(T
(s)) = max
R
k
rang(T
(s))
Cela signie que le rang de la matrice de transfert T
(s) est egal a q pour presque
toutes les valeurs de R
k
, o` u presque toutes doit etre compris comme toutes les
valeurs
i
sauf celles qui se trouvent dans une variete propre [Wonham, 1985].
Jusquici, nous avons parle de limportance de letude des proprietes des syst`emes
structures et de la notion de genericite. Nous avons aussi deni le rang generique dune
matrice de transfert pour les syst`emes lineaires structures. La section suivante est con-
sacree `a la representation graphique des syst`emes lineaires structures et, plus precisement,
` a lassociation dun graphe oriente `a tout syst`eme lineaire structure ainsi qu` a la denition
de certaines notions simples utiles ` a la synth`ese et ` a lenonce des resultats presentes dans
ce manuscrit.
1.2 Representation graphique des syst`emes lineaires
structures
D`es les annees 1970, une nouvelle approche reposant sur la representation par graphe
oriente du mod`ele detat des syst`emes structures, en a autorise une analyse pertinente
et ecace. La propriete de commandabilite a ete la premi`ere `a etre etudiee [Lin, 1974,
Shields et Pearson, 1976, Glover et Silverman, 1976]. Bien que les preuves restent fondees
sur des arguments algebriques ou geometriques, les resultats enonces sont tr`es simples `a
appliquer et ` a comprendre. En eet, les crit`eres de commandabilite trouves sont relatifs ` a
lexistence de chemins, de cycles, au calcul du nombre maximal de chemins disjoints . . . .
En outre, ces notions etant assez communes dans la theorie des graphes, des
algorithmes optimises existent pour leur manipulation. La simplicite et le fait que
lapproche graphique permette de se defaire de certaines dicultes numeriques in-
herentes aux approches geometrique et algebrique ont conduit ` a une serie detudes
basees sur lapproche graphique. Ainsi, apr`es la commandabilite, lobservabilite, la
12 1.2. Representation graphique des syst`emes lineaires structures
solubilite des probl`emes de decouplage, de rejet de perturbations, les dimensions des
sous-espaces invariants, la structure nie et ` a linni des syst`emes, la detectabil-
ite, la localisabilite des defauts ont ete traites [Murota, 1987, Reinschke, 1988,
van der Woude et Murota, 1995, van der Woude, 1996, Dion et al., 2001,
Commault et al., 2002a, Commault et al., 2002b, van der Woude et al., 2003]. La
majorite des proprietes des syst`emes lineaires ont ete caracterisees graphiquement en
utilisant le plus souvent les notions de nombre et de longueur de chemins et de cycles
disjoints.
Dautres types de representations graphiques ont ete utilisees pour lanalyse de pro-
prietes structurelles des syst`emes lineaires. Cest le cas de [Rahmani et al., 1997] o` u les
auteurs, en sappuyant sur la theorie des bond-graphes, proposent une methode pour
lanalyse structurelle de proprietes telles que la commandabilite et lobservabilite des sys-
t`emes lineaires. Une approche basee sur le comportement du syst`eme est utilisee dans
[Blanke et al., 2003],...
Dans ce travail, deux types de representations sont utilisees : graphes orientes et
graphes bipartis. Dans un premier temps, nous presentons la representation par graphes
orientes, plus amplement utilisee dans ce memoire. Ensuite, la representation par graphes
bipartis est abordee. La representation des syst`emes lineaires structures par graphes ori-
entes et bipartis est utilisee classiquement dans les travaux danalyse structurelle par ap-
proche graphique [Murota, 1987, Reinschke, 1988, Dion et al., 2003]. Ensuite, nous don-
nons quelques denitions utiles `a lanalyse des proprietes dobservabilite que nous nous
proposons de mener.
1.2.1 Graphe oriente associe `a un syst`eme lineaire structure
Un graphe oriente denote ((
) peut etre associe au syst`eme structure
. Il est
compose dun ensemble de sommets note V et dun ensemble darcs E. Lensemble des
sommets V est associe aux variables du syst`eme, cest ` a dire aux composantes de letat,
aux composantes de lentree inconnue (perturbations, defauts, etc.) et aux composantes
des mesures du syst`eme structure. Lensemble des arcs E represente lexistence de relations
Chapitre 1. Introduction 13
statiques ou dynamiques entre les variables du syst`eme.
Plus precisement : V = XYU o` u X = x
1
, . . . , x
n
est lensemble de sommets-etats,
Y = y
1
, . . . , y
p
est lensemble de sommets-sorties et U = u
1
, . . . , u
q
est lensemble
de sommets-entrees.
Lensemble darcs E = A-arcs B-arcs C-arcs D-arcs est tel que
A-arcs =
_
(x
j
, x
i
) [ A
(i, j) ,= 0
_
, B-arcs =
_
(u
j
, x
i
) [ B
(i, j) ,= 0
_
,
C-arcs =
_
(x
j
, y
i
) [ C
(i, j) ,= 0
_
, D-arcs =
_
(u
j
, y
i
) [ D
(i, j) ,= 0
_
.
Les matrices A
, B
, C
et D
sont des matrices structurees. Lelement (i, j) de la
matrice structuree M
est represente par M
(i, j).
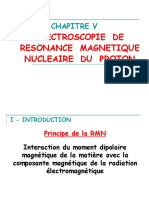
Pour illustrer le graphe oriente propose, nous utilisons un exemple simple de syst`eme
structure
Exemple 1.1. Soient les matrices
A
=
_
_
_
_
_
_
_
_
_
_
_
_
_
_
_
_
_
0 0 0
1
0 0 0
0 0 0
2
0 0 0
0 0 0 0
3
0 0
0 0 0 0 0
4
0
0 0 0 0 0 0 0
0 0 0 0 0 0
5
0 0 0 0 0
6
0
_
_
_
_
_
_
_
_
_
_
_
_
_
_
_
_
_
, B
=
_
_
_
_
_
_
_
_
_
_
_
_
_
_
_
_
_
0 0
0 0
0 0
7
0
8
0
0 0
0 0
_
_
_
_
_
_
_
_
_
_
_
_
_
_
_
_
_
,
C
=
_
_
_
_
_
9
10
0 0 0 0 0 0
0
11
12
0 0 0 0 0
0 0 0 0
13
0 0 0
_
_
_
_
_
et D
=
_
_
_
_
_
0 0
0 0
0
14
_
_
_
_
_
Le graphe oriente associe `a un tel syst`eme structure est presente `a la gure 1.1.
14 1.2. Representation graphique des syst`emes lineaires structures
Fig. 1.1 Representation graphique du syst`eme structure
de lexemple 1.1
1.2.2 Notations et denitions
Ci-dessous, nous donnons quelques denitions utiles aux analyses presentees lors des
paragraphes suivants.
Un arc e E est note par e = (v
i
, v
j
) o` u v
i
est le sommet de depart ou initial et v
j
est
le sommet darrivee ou nal de larc e.
Deux arcs e
1
= (v
1
, v
1
) et e
2
= (v
2
, v
2
) sont v-disjoints si leurs sommets de debut ainsi
que leurs sommets de n sont mutuellement distincts i.e. v
1
,= v
2
et v
1
,= v
2
. Des arcs
sont v-disjoints sils sont v-disjoints deux ` a deux. Il est `a noter que e
1
et e
2
peuvent etre
v-disjoints meme si v
2
= v
1
et v
1
= v
2
.
Par exemple, dans la gure 1.1, les arcs (x
4
, x
1
) et (x
4
, x
2
) ou (x
1
, y
1
) et (x
2
, y
1
) ne
sont pas v-disjoints. En revanche, (x
4
, x
2
) et (x
2
, y
1
) sont v-disjoints, ainsi que (x
6
, x
4
)
et (x
4
, x
2
).
Un chemin consiste en une sequence darcs (v
r
j
, v
r
j+1
) E pour j = 0, 1, . . . , i 1 et il
est note par P = v
r
0
v
r
1
v
r
i
Un chemin est dit simple lorsquil ne passe pas deux fois par le meme sommet.
Un cycle est un chemin de la forme v
r
0
v
r
1
. . . v
r
i
v
r
0
, o` u tous les sommets
v
r
0
, v
r
1
,. . . , v
r
i
sont distincts.
Un chemin U-racine est un chemin qui a comme sommet de depart un element de
lensemble U.
Un chemin Y-cime est un chemin qui a comme sommet de n un element de lensemble
Y.
Chapitre 1. Introduction 15
Des chemins sont disjoints sils nont aucun sommet commun.
La longueur dun chemin est denie comme le nombre darcs quil contient, chaque arc
etant compte autant de fois quil apparat dans le chemin.
Soient V
1
et V
2
deux sous-ensembles de sommets de V. Le cardinal de lensemble V
1
(respectivement V
2
) est note card(V
1
) (respectivement card(V
2
)).
Un chemin dont le sommet de depart appartient `a V
1
et le sommet de n appartient `a
V
2
, est appele chemin V
1
-V
2
. De plus, sil ny a que le sommet de depart du chemin P
qui appartient ` a V
1
et que le sommet de n qui appartient ` a V
2
, alors le chemin P est
appele chemin V
1
-V
2
direct.
Lensemble de chemins V
1
-V
2
disjoints est appele un lien (linking) V
1
-V
2
de taille .
Les liens composes dun nombre maximal de chemins disjoints sont appeles liens V
1
-V
2
maximaux. La taille dun tel lien est denie comme
(V
1
, V
2
) = nombre maximal de chemins V
1
-V
2
disjoints
la longueur dun lien V
1
-V
2
est denie comme etant la somme des longueurs de tous les
chemins composant ce lien. La longueur minimale dun lien est le nombre minimal darcs
necessaires pour composer ce lien.
On denit aussi (V
1
, V
2
) par le nombre minimal de sommets appartenant ` a un lien
V
1
-V
2
maximal et
_
V
1
, V
2
_
par le nombre maximal darcs v-disjoints dont les sommets
de debut sont dans V
1
et les sommets de n dans V
2
.
Notons que la longueur minimale dun lien V
1
-V
2
maximal est egale `a (V
1
, V
2
)(V
1
, V
2
)
Lexemple simple suivant illustre les denitions enoncees ci-dessus.
Exemple 1.2. Considerons le graphe oriente ( de la gure 1.2.
Fig. 1.2 Lien maximal dun graphe
16 1.2. Representation graphique des syst`emes lineaires structures
Il existe quatre chemins U-Y possibles :
P
11
: u
1
x
3
x
1
y
1
,
P
12
: u
1
x
3
y
2
,
P
21
: u
2
x
4
x
1
y
1
,
P
22
: u
2
x
4
x
2
y
2
Il est possible davoir au maximum deux chemins U-Y disjoints. Les liens U-Y maximaux
sont alors P
11
, P
22
et P
12
, P
21
. On a donc (U, Y) = 2, (U, Y) = 7 alors que
(U, Y) = 0.
Lensemble de sommets note V
ess
(V
1
, V
2
) regroupe les sommets communs ` a tous les
liens V
1
-V
2
maximaux. Ces sommets sont dits sommets essentiels dans les liens V
1
-V
2
maximaux.
Un ensemble de sommets S(V
1
, V
2
) est appele separateur entre V
1
et V
2
si chaque
chemin V
1
-V
2
contient au moins un sommet appartenant ` a S. Un separateur est dit
minimal sil contient un nombre minimal delements. Ce nombre est egal ` a
_
V
1
, V
2
_
dapr`es le theor`eme de Menger.
Lunion de tous les separateurs est egale ` a lensemble des sommets essentiels V
ess
(V
1
, V
2
).
Il existe deux separateurs minimaux particuliers et uniques : le separateur dentree et le
separateur de sortie notes respectivement S
i
(V
1
, V
2
) et S
o
(V
1
, V
2
) et denis comme suit :
- S
i
(V
1
, V
2
) est lensemble des sommets de n de tous les chemins V
1
-V
ess
(V
1
, 1
2
) directs
en prenant en compte les chemins de longueur nulle.
- S
o
(V
1
, V
2
) est lensemble des sommets de debut de tous les chemins V
ess
(V
1
, V
2
) V
2
directs, en prenant en compte les chemins de longueur nulle.
Une consequence directe de ces denitions est que V
ess
(V
1
, V
2
) V
1
S
i
(V
1
, V
2
) et
V
ess
(V
1
, V
2
) V
2
S
o
(V
1
, V
2
).
Une union disjointe de chemins et de cycles est un ensemble de chemins et de cycles
nayant aucun sommet commun. Une telle union couvre un sommet v, sil existe un chemin
appartenant ` a cette union qui passe par v.
Chapitre 1. Introduction 17
Un graphe partiel de ((
) engendre par un ensemble darcs o
E
c est note o
G
=
(o
V
, o
E
) o` u lensemble de sommets o
V
1 est constitue des sommets de debut et de n
de tous les arcs de o
E
.
Exemple 1.3. Considerons le syst`eme structure represente par le graphe oriente de la
gure 1.3. Nous constatons quil y a au maximum 3 chemins disjoints entre U et Y,
(U, Y) = 3. Ainsi, le separateur minimal est constitue de 3 sommets. Nous pouvons citer
quelques separateurs minimaux composes de trois sommets : S
1
(U, Y) = x
3
, x
4
, y
4
,
S
2
(U, Y) = x
3
, x
4
, x
5
, S
3
(U, Y) = x
6
, x
7
, x
8
et S
4
(U, Y) = x
6
, x
7
, u
4
par exem-
ple. Lensemble de sommets essentiels est donne par V
ess
(U, Y) = x
3
, x
4
, x
5
, x
6
, x
7
, x
8
, u
4
, y
4
.
Fig. 1.3 Exemple illustrant les sommets essentiels et les separateurs
Parmi les separateurs minimaux, il est facile de distinguer le separateur dentree
comme etant S
i
(U, Y) = x
6
, x
7
, u
4
et le separateur de sortie S
o
(U, Y) = x
3
, x
4
, y
4
.
1.2.3 Graphe biparti associe `a un syst`eme lineaire structure
Une autre representation graphique utile ` a lanalyse des syst`eme structures est celui de
graphes bipartis. Un graphe biparti denote B(
) peut etre associe au syst`eme structure
. Il est compose de deux ensemble de sommets disjoints V
+
et V
et dun ensem-
ble darcs W. Les ensembles V
+
et V
sont associes aux composantes de letat, aux
composantes de lentree inconnue et aux composantes des mesures. Lensemble darcs
represente les relations entre les variables du syst`eme.
18 1.3. Les problematiques abordees dans ce travail
Plus precisement, lensemble de sommets V
+
= X
+
U
+
et V
= Y
avec
X
+
= x
+
1
, x
+
2
, . . . , x
+
n
, U
+
1
= u
+
1
, u
+
2
, . . . , u
+
q
, X
= x
1
, x
2
, . . . , x
n
, Y
1
=
y
1
, y
2
, . . . , y
p
. Lensemble darcs W est deni par
_
(x
+
j
, x
i
) [ A
(i, j) ,= 0
_
_
(u
+
j
, x
i
) [ B
(i, j) ,= 0
__
(x
+
j
, y
i
) [ C
(i, j) ,= 0
__
(u
+
j
, y
i
) [ D
(i, j) ,= 0
_
.
En fait, il existe dans le graphe biparti un arc (v
+
i
, v
j
) sil existe un arc correspondant
(v
i
, v
j
) dans le graphe oriente ((
).
Un couplage dans un graphe biparti B(
) = (V
+
, V
, W) est un ensemble M W
darcs disjoints (et donc v-disjoints car le graphe est biparti). Un couplage est maximal sil
contient un nombre darcs egal ` a (V
+
, V
). Nous notons par
+
M (resp.
M) lensem-
ble des sommets de V
+
(resp. de V
) incidents aux arcs inclus dans M.
Exemple 1.4.
Les deux principaux representations graphiques utilisees dans ce document etant dej`a
presentees, le paragraphe suivant est dedie `a lexpose des principaux objectifs et motiva-
tions de ce memoire.
1.3 Les problematiques abordees dans ce travail
Observabilite forte de letat et de lentree inconnue pour les syst`emes lineaires structures
Lobservabilite forte traduisant lobservabilite des variables detat dun syst`eme pour
toute valeur dentree ainsi que lobservabilite conjointe de letat et de lentree inconnue
restent encore des proprietes des syst`emes lineaires structures non abordees graphique-
ment. Ces proprietes un peu plus fortes que lobservabilite de letat ou que la detection
et la localisation dentrees inconnues de type defauts sont utiles et pertinentes ` a etudier
au sein de lequipe projet dimodic du cran ` a laquelle jappartient dont les thematiques
de recherches gravitent autour du diagnostic et de la synth`ese de commandes tolerantes
aux defauts avec des applications recentes aux syst`emes distribues en reseaux. En eet,
Chapitre 1. Introduction 19
les syst`emes ` a entrees inconnues peuvent par exemple representer des syst`emes soumis ` a
des defauts dont lestimation pourrait servir dans le cadre de la synth`ese de commandes
tolerantes aux defauts. De meme, les syst`emes distribues en reseaux peuvent etre con-
sideres comme etant un assemblage de syst`emes independants dont les interactions sont
representees par des entrees inconnues. Letude de lobservabilite forte de letat consisterait
suivant les cas ` a savoir si les defauts symbolises par des entrees inconnues ne deteriorent
pas la capacite `a estimer les composantes de letat ou si un syst`eme distribue en reseau
reste observable en distribuant les schemas dobservation localement sur les sous-syst`emes
qui le composent.
Ainsi motivee, notre analyse graphique de lobservabilite des syst`emes ` a entrees in-
connues a pris en compte plusieurs cas. En premier lieu, nous nous sommes interesses
` a lobservabilite de toutes les composantes de letat et de lentree. Ensuite, nous avons
etudie les conditions dobservabilite forte dune partie donnee de letat et/ou de lentree.
Enn, lobservabilite forte de tout letat est consideree. Cela correspond sommairement
aux cas detudes que nous avons juges les plus interessants dans le contexte des syst`emes
` a entrees inconnues.
Placement de capteurs pour le recouvrement de lobservabilite
Le rajout de capteurs pour le recouvrement dune propriete donnee a dej` a ete etudie
dans le cadre des syst`emes lineaires structures. Dans [Commault et al., 2005b], les au-
teurs sinteressent au recouvrement de la propriete dobservabilite. Le probl`eme est divise
en deux parties. La premi`ere partie consiste ` a assurer que le syst`eme est connecte ` a la
sortie. Ensuite, il sagit de faire en sorte quil ny ait aucune contraction dans le graphe
associe au syst`eme, ou plus precisement, il doit exister un ensemble de chemins et/ou de
cycles disjoints qui couvrent tout letat. Plus recemment, dans [Commault et Dion, 2007,
Commault et al., 2006], les auteurs donnent par approche graphique, une classication
des capteurs et de leur localisation permettant de resoudre le probl`eme de detection de
defauts `a base dobservateurs.
Dautres travaux sur le placement de capteurs utilisent des representations graphiques
dierentes. Ainsi, les diagrammes de ots de donnees representant les informations dob-
20 1.3. Les problematiques abordees dans ce travail
servation sur les syst`emes sont utilises dans [Maquin et al., 1995, Maquin et al., 1994]
pour resoudre des probl`emes dobservabilite ou de diagnosticabilite. Les graphes
bipartis sont employes dans [Frisk et Krysander, 2007, Trave-Massuy`es et al., 2001,
Trave-Massuyes et al., 2006], qui comparent la capacite structurelle dun ensemble donne
de congurations de capteurs ` a detecter et localiser des defauts. Citons aussi les approches
fondees sur les bond-graphes [Khemliche et al., 2006] qui aboutissent `a des procedures de
placement de capteurs `a des ns de diagnostic applicables ` a des syst`emes assez complexes.
Dans ce contexte, il nous a paru interessant de completer notre analyse de lobserv-
abilite des syst`emes ` a entrees inconnues par une etude de placement de capteurs pour le
recouvrement des proprietes considerees. L`a aussi, en relation avec les proprietes etudiees,
nous avons considere separement le recouvrement de lobservabilite forte en presence den-
trees inconnues dune partie donnee de letat puis celle de tout letat.
Letude consiste ` a placer des capteurs de sorte que le syst`eme devienne, suivant le cas,
soit compl`etement observable, soit tel quun ensemble donne de composantes de letat et
de lentree inconnue soit observable. Pour ce faire, il est evident que lune des premi`eres
conditions est la condition de conectivite `a la sortie puisque il doit etre garanti que tous les
etats et les entree inconnues ont un lien avec la sortie. Cela signie que tout changement
dans detats et dentrees inconnues est reete par les mesures. Ensuite, Il sagit de sat-
isfaire aux conditions dobservabilite forte du syst`eme. Les resultats trouves donnent des
conditions necessaires et susantes au placement de capteurs, ` a savoir, leur localisation.
Le nombre minimal de capteurs ` a rajouter pour le recouvrement de lobservabilite forte
dune partie de letat na pas ete trouve. Seulement une borne superieure ` a ce nombre `a
ete obtenue.
Bote `a outils LISA
Enn, une fa con de concretiser nos travaux a ete de participer ` a la conception dun
logiciel sous la forme dune bote ` a outils danalyse structurelle dont lobjectif est de pro-
poser une panoplie dalgorithmes permettant de caracteriser des proprietes structurelles
ou la solubilite de probl`emes classiques de commande.
Chapitre 1. Introduction 21
Nos travaux de th`ese ont donne lieu `a un article de revue :
T. Boukhobza, F. Hamelin et S. Martinez-Martinez. State and input observ-
ability for structured linear Systems : a graph-theoretic approach. Automatica, 43(7),
12041210, 2007,
un article de congr`es international avec comite de lecture :
S. Martinez-Martinez, T. Mader, T. Boukhobza et F. Hamelin. LISA : a linear
structured system analysis program. Dans IFAC Symposium on System, Structure and
Control (SSSC), Foz do Iguacu, Bresil, 2007,
et ` a la soumission dun article en revue :
T. Boukhobza, F. Hamelin, S. Martinez-Martinez et D. Sauter . Partial state
and input observability for structured linear Systems : a graph-theoretic approach. Soumis
`a European Journal of Control, 2008.
Lobjectif de ce manuscrit est de decrire les travaux eectues lors de cette th`ese. Les
divers resultats sont illustres par des exemples simples permettant aux lecteurs non fam-
iliers avec lapproche graphique de mieux comprendre les developpements theoriques de
notre travail. Le premier chapitre, des trois que comporte ce document, regroupe tous
les resultats danalyse dobservabilite pour les syst`emes ` a entrees inconnues. Le second
chapitre traite de laspect placement de capteurs pour le recouvrement des proprietes
dobservabilite etudiees. Enn, le dernier chapitre est dedie ` a la presentation de la bote
` a outils danalyse structurelle lisa. Sans rentrer dans les details de programmation, une
description des fonctionnalites et une discussion des ordres de complexite des dierents
algorithmes implementes sont exposees. Enn, une conclusion et quelques perspectives
` a ce travail, notamment en ce qui concerne les probl`emes de placements de capteurs et
lenrichissement de lisa, sont donnees.
22 1.3. Les problematiques abordees dans ce travail
2
Observabilite generique de letat et
de lentree des syst`emes lineaires
structures
2.1 Introduction
La propriete dobservabilite qui consiste ` a garantir que les mesures faites sur un sys-
t`eme sont susamment informatives pour pouvoir en deduire toutes les variables non
mesurees du syst`eme, est une propriete fondamentale en automatique. Ainsi, il est im-
portant de faire letude de cette propriete lorsquil sagit de construire un observateur
permettant lestimation de letat et des entrees dun syst`eme. Cela est evidemment utile
dans le contexte de la commande, si les lois de commande doivent utiliser des variables
non mesurees mais aussi du diagnostic pour la construction et la generation de residus,
de la commande tolerante aux defauts pour laquelle lobservation des amplitudes des de-
fauts peut etre un avantage ou tout simplement dans le cadre de la supervision et de la
surveillance de processus.
Aussi, lobservabilite est lune des premi`eres proprietes, avec la commandabilite, ` a avoir
fait lobjet de caracterisations diverses par lutilisation de multiples outils mathematiques.
23
24 2.1. Introduction
Les conditions classiques dobservabilite pour les syst`emes lineaires utilisent les notions
de dimension de sous-espaces vectoriels, de rang de matrices ou de faisceaux de matrices
[Zadeh et Desoer, 1963, Kalman, 1968, Kailath, 1980, Rosenbrock, 1970, Wonham, 1985].
Cela est aussi le cas pour lanalyse de lobservabilite des syst`emes ` a entrees inconnues
[Sain et Massey, 1969, Basile et Marro, 1969, Guidorzi et Marro, 1971]
[Basile et Marro, 1973, Basile et al., 1981, Hautus, 1983]. Du fait des outils utilises, la
majorite des crit`eres dobservabilite necessitent pour leur application la connaissance des
param`etres du syst`eme etudie. Or, dune part, la valeur des param`etres nest pas toujours
connue, notamment lors de la phase de conception du syst`eme. Dautre part, il est etabli
[Willems, 1986] que la propriete dobservabilite est une propriete qui depend beaucoup
plus de la structure du syst`eme considere que de la valeur des param`etres de ce syst`eme.
Aussi, comme cela a ete argumente dans lintroduction generale de ce manuscrit, lap-
proche graphique permet detudier ecacement des syst`emes dont on ne connat que la
structure i.e. la repartition des termes nul/non-nuls dans les matrices detat par exemple.
Les conditions graphiques de lobservabilite de letat dun syst`eme sans entree inconnue
sont rappelees dans [Murota, 1987, Reinschke, 1988, Dion et al., 2003]. Elles sexpriment
en termes de connectivite `a la sortie et de couplage maximal dans un graphe biparti ou
par lexistence dun ensemble de chemins simples et de cycles disjoints recouvrant tous les
sommets dun graphe. Notre objectif est detendre lanalyse graphique de lobservabilite
aux syst`emes a entrees inconnues sans faire dhypoth`eses sur ces derni`eres. En eet, si
nous supposons les entrees lentement variables, le probl`eme etudie se ram`ene, par exten-
sion de letat du syst`eme, ` a celui de letude de lobservabilite dun syst`eme sans entree
inconnue. Nous considererons dans ce memoire des entrees inconnues exog`enes sans con-
trainte ou connaissance sur leur dynamique. Une analyse de lexistence dun observateur
causal permettant lestimation de letat en decouplant lerreur dobservation des entrees
inconnues a ete eectuee dans [Commault et al., 2001]. Ces conditions sont evidemment
des conditions susantes dobservabilite forte de letat. Notre travail danalyse mene ici
est dierent de [Commault et al., 2001], car nous ne nous interessons pas ` a la synth`ese
dun observateur, bien que ce probl`eme soit egalement dun grand interet. Cest bien la
Chapitre 2. Observabilite generique de letat et de lentree des syst`emes lineaires structures 25
propriete dobservabilite seule que nous avons tente de cerner, cest ` a dire la capacite in-
formative des mesures eectuees sur le syst`eme. Par ailleurs, il a ete prouve dans le cadre
des syst`emes singuliers [Hou et M uller, 1999], que lobservabilite forte est une condition
necessaire et susante ` a lexistence dun observateur non causal qui permettrait la recon-
struction de letat mais qui utiliserait les derivees des signaux de mesure.
Plus precisement, nous nous interesserons dans ce chapitre `a trois cas distincts. Le pre-
mier consiste `a donner les conditions pour que le syst`eme lineaire structure soit totale-
ment fortement observable, cest ` a dire, des conditions pour que toutes les composantes
des vecteurs detat et dentree soient observables. Ensuite, lorsque le syst`eme nest pas
compl`etement observable, nous etudierons lobservabilite forte dune partie donnee des
composantes de letat et de lentree inconnue. Enn, nous nous interesserons `a la pro-
priete dobservabilite forte de letat qui est notamment utile dans le cadre de la synth`ese
dobservateurs pour lanalyse de tolerance aux defauts ou de lautonomie des syst`emes
distribues en reseaux.
2.2 Observabilite totale de letat et de lentree dun
syst`eme lineaire structure
Le premier probl`eme aborde dans ce chapitre est lanalyse graphique de lobservabilite
generique de lentree et de letat de
. Avant cela, nous donnons dabord la denition de
la propriete dobservabilite totale. Ensuite, quelques resultats concernant la caracterisation
algebrique et geometrique de cette propriete sont rappeles. Une subdivision particuli`ere
du syst`eme est alors presentee avant lenonce de notre principal resultat. A la n de cette
section, un exemple est presente pour illustrer lapplicabilite de lapproche proposee.
26 2.2. Observabilite totale de letat et de lentree dun syst`eme lineaire structure
2.2.1 Position du probl`eme
Considerons le syst`eme lineaire structure
_
_
_
x(t) = A
x(t) + B
u(t)
y(t) = C
x(t) + D
u(t)
Letat et lentree du syst`eme lineaire structure
sont generiquement observables si toute
variation de lentree ou de letat initial se re`ete sur la sortie, ce qui peut secrire plus
formellement :
Denition 2.1. Letat et lentree du syst`eme lineaire structure
sont generiquement
observables lorsque pour tout etat initial x
0
et pour tout signal dentree u(t), legalite
y(t) = 0, t 0 implique x(t) = 0, t 0 et u(t) = 0, t > 0.
En dautres termes, lobservabilite totale de lentree et de letat est equivalente ` a
la possibilite dexprimer toutes les composantes de letat et de lentree en fonction des
sorties et de leur derivees. Cela nest evidemment possible que si les mesures eectuees
sur le syst`eme, symbolisees ici par les sorties y(t), sont susamment informatives pour
pouvoir reeter toute variation de letat et/ou de lentree.
Ainsi, letat et lentree dun syst`eme sont generiquement observables si et seulement si
ce dernier est generiquement fortement observable et inversible `a gauche
[Trentelman et al., 2001].
Des crit`eres algebriques et geometriques dobservabilite totale de lentree et de letat
existent depuis les annees 1970. En eet, Il est possible de deduire de [Hautus, 1983] :
Theor`eme 2.1. Considerons le syst`eme structure
et soit P
(s) =
_
_
A
sI
n
B
_
_
le faisceau de matrices de
.
Letat et lentree du syst`eme lineaire structure
sont generiquement observables si et
seulement si
s C, g-rang(P(s)) = n + q
Chapitre 2. Observabilite generique de letat et de lentree des syst`emes lineaires structures 27
Un crit`ere geometrique utilisant la notion de sous-espace dobservabilite peut aussi etre
deduit de [Basile et Marro, 1969, Basile et Marro, 1973, Basile et al., 1981]. Pour cela,
nous notons E = (I
nn
[ 0
nq
) o` u I
nn
est la matrice identite de rang n et 0
nq
est la
matrice nulle ayant n lignes et q colonnes.
A = (A
[ B
) et
C = (C
[ D
). Considerons
alors la suite de sous-espaces obtenus par la recurrence
_
_
_
0
E,
A,
C
= Im
_
C
T
_
i+1
E,
A,
C
=
i
E,
A,
C
+
A
T
E
_
i
E,
A,
C
Im
_
E
T
_
_
(2.1)
Cette suite est une suite non decroissante et comme elle est bornee, elle converge en moins
de n+q iterations. Soit
le sous-espace maximal donne par cette suite. Nous avons alors
Theor`eme 2.2. Letat et lentree du syst`eme lineaire structure
sont generiquement
observables si et seulement si g-dim(
) = n + q.
o` u g-dim(
) represente la dimension generique du sous-espace
, cest `a dire, la dimen-
sion de
pour presque toutes les valeurs de .
Ce resultat, prouve dans [Boukhobza et al., 2005], est assez aisement deductible du Theor`eme
2.1 de [Basile et Marro, 1969] ou de [Basile et al., 1981] qui donnent le sous-espace inob-
servable Q
1
dans lespace detat pour un syst`eme `a entrees inconnues : Q
1
est le plus grand
sous-espace (A
, B
) invariant inclus dans ker C
i.e. A
Q
1
Q
1
+ImB
et Q
1
ker C
.
Lobjectif que nous nous sommes xe, dans un premier temps, est de donner des condi-
tions graphiques equivalentes ` a celles des theor`emes 2.1 et 2.2 en tenant compte si possible
de laspect calculatoire an dobtenir un outil danalyse adapte aux syst`emes de grande
dimension.
2.2.2 Subdivision du syst`eme lineaire structure
Le calcul de la dimension generique du sous-espace dobservabilite est tr`es lie au nom-
bre generique de zeros invariants du syst`eme considere. La caracterisation graphique de
ce nombre a fait lobjet de plusieurs publications parmi lesquelles [van der Woude, 2000,
van der Woude et al., 2003]. Lutilisation des resultats de [van der Woude, 2000] a sem-
ble plus judicieuse dans le contexte de lanalyse de lobservabilite totale. Cependant les
28 2.2. Observabilite totale de letat et de lentree dun syst`eme lineaire structure
deux theor`emes principaux de cette publication concernent des syst`emes carres (autant
dentrees que de sorties) ou des syst`emes rectangulaires particuliers. Ainsi, pour pouvoir
appliquer ces deux theor`emes au calcul du nombre generique de zeros invariants dun
syst`eme quelconque, il faut faire apparatre ces deux types de syst`emes. A cette n, les
ensembles de sommets suivants sont introduits :
Denition 2.2. Soit le syst`eme lineaire structure
represente par le graphe oriente
((
). Lensemble des sommets du graphe oriente ((
) est subdivise en plusieurs sous-
ensembles
0
def
=
_
x
i
X[
_
U x
i
, Y
_
=
_
U, Y
_
_
;
X
1
def
=
_
x
i
X[
_
U x
i
, Y
_
>
_
U, Y
_
_
;
Y
0
def
=
_
y
i
Y[
_
U, Y
_
>
_
U, Y y
i
__
;
Y
1
def
= Y Y
0
;
U
0
def
=
_
u
i
U[
_
u
i
, X
1
Y
1
_
= 0
_
;
U
1
def
= U U
0
;
S
o
def
= S
o
(U
0
, Y) ;
X
s
def
= S
o
X;
X
0
def
=
0
X
s
.
Avant dinterpreter la decomposition proposee dans la denition ci-dessus, un exemple
est presente an de lillustrer.
Exemple 2.1. Considerons le syst`eme structure represente par le graphe oriente de la
gure 2.1. Calculons tout dabord le nombre maximal de chemins disjoints entre lentree et
la sortie. Nous avons,
_
U, Y
_
= 3. Considerons maintenant chacun des sommets x
i
. A
partir des sommets dentree et du sommet x
5
par exemple, il nest pas possible davoir plus
de 3 chemins disjoints vers la sortie, alors
_
U x
5
, Y
_
=
_
U, Y
_
et le sommet x
5
appartient au sous-ensemble
0
. En faisant la meme demarche avec les autres sommets,
nous obtenons
0
= x
1
, x
5
, x
6
, x
7
, x
10
, x
11
. En revanche, pour le sommet x
3
, le nombre
maximal de chemins disjoints entre x
3
U vers Y est plus grand que celui entre U vers
Y. Nous avons en eet
_
Ux
3
, Y
_
= 4 >
_
U, Y
_
. Il en est de meme pour les autre
Chapitre 2. Observabilite generique de letat et de lentree des syst`emes lineaires structures 29
sommets qui nappartiennent pas `a
0
. Par consequent, X
1
= x
2
, x
3
, x
4
, x
8
, x
9
.
Fig. 2.1 Decomposition du syst`eme
En ce qui concerne les sorties, nous constatons que
_
U, Y y
1
_
= 2 <
_
U, Y
_
.
La sortie y
1
est donc essentielle. Dailleurs, y
1
est la seule sortie essentielle car,
_
U, Y
y
2
_
=
_
U, Y y
3
_
=
_
U, Y y
4
_
=
_
U, Y
_
. Nous trouvons alors Y
0
= y
1
et Y
1
= y
2
, y
3
, y
4
.
Avec les sous-ensembles precedents, nous constatons facilement quaucun arc ne relie
u
1
, u
2
`a un quelconque sommet de X
1
Y
1
, et alors U
0
= u
1
, u
2
et U
1
= u
3
.
Le separateur de sortie est S
o
(U
0
, Y) = x
7
, y
1
. On en deduit facilement X
s
= x
7
et
nalement, X
0
= x
1
, x
5
, x
6
, x
10
, x
11
.
Les quelques remarques suivantes permettent de mieux comprendre la decomposition
introduite ` a la denition 2.2 :
En considerant un syst`eme structure sans entree inconnue, lensemble X
0
regrouperait
les sommets etat qui nont pas de chemin vers la sortie ou autrement dit non con-
nectes aux sommets sortie.
En general,
0
regroupe les sommets etat qui
soit ne sont pas connectes aux sommets de sortie,
soit font partie des sommets essentiels pour les liens U-Y maximaux i.e. V
ess
(U, Y)
X
0
. En outre, aucun element de X
1
Y
1
nest inclus dans V
ess
(U, Y) ou
en dautres termes V
ess
(U, Y) X
0
.
30 2.2. Observabilite totale de letat et de lentree dun syst`eme lineaire structure
soit sont tels que tous les chemins les reliant aux sorties passent obligatoirement
par un sommet essentiel pour les liens U-Y maximaux. En eet, si cela netait pas
le cas, i.e. sil existait des elements v
i
0
et un chemin P partant de v
i
vers Y
qui ne contienne aucun element de V
ess
(U, Y), alors il ny aurait aucun element de
S
o
(U, Y) dans P et donc card(S
o
(U v
i
, Y)) > card(S
o
(U, Y)). Or, dapr`es
le theor`eme de Menger, cela impliquerait que (U v
i
, Y) > (U, Y), ce qui
contredit le fait que v
i
0
.
Directement ` a partir de la denition de Y
0
, nous avons Y
0
V
ess
(U, Y) et donc
Y
0
S
o
(U, Y).
En supposant que (U, Y) = q, alors (U
1
, Y) = card(U
1
). Dans ce cas, U
1
V
ess
(U, Y) et par consequent U
1
S
i
(U, Y). Dautre part, comme (X
1
Y
1
)
V
ess
(U, Y) = , tous les elements de U
1
sont les sommets de depart de chemins
V
ess
(U, Y) Y directs et donc U
1
S
o
(U, Y). Par ailleurs, U
1
S
i
(U, Y) et
U
1
S
o
(U, Y) impliquent que, dans un lien U-Y maximal, tous les sommets
inclus dans un chemin partant de U
1
ne sont pas inclus dans V
ess
(U, Y) et donc ne
peuvent appartenir `a
0
. En conclusion,
V
ess
(U, Y) = U
1
V
ess
(U
0
, Y) (2.2)
A partir de chaque sommet x
i
X
1
, il existe un chemin Y-cime disjoint ` a tous les
chemins dau moins un lien U-Y maximal. Par consequent, pour tout x
i
X
1
, il
existe un chemin Y-cime constitue uniquement delements de X
1
et Y
1
. De meme,
x
i
X
1
, dans tous les liens U x
i
Y maximaux, les chemins partant de
sommets appartenant `a U
1
x
i
ne passent necessairement que par des sommets
de X
1
Y
1
. Pareillement, y
i
Y
1
, dans tous les liens UYy
i
maximaux, les
chemins partant de U
1
ne passent necessairement que par des sommets de X
1
Y
1
.
En resume, x
i
X
1
et y
i
Y
1
,
V
ess
(U x
i
, Y) (
0
Y
0
) = V
ess
(U, Y y
i
) (
0
Y
0
) = V
ess
(U
0
, Y)
(2.3)
Dautres proprietes essentielles de la decomposition sont formalisees dans le lemme suiv-
ant :
Chapitre 2. Observabilite generique de letat et de lentree des syst`emes lineaires structures 31
Lemme 2.3. Soit le syst`eme lineaire structure
represente par le graphe oriente ((
).
En supposant (U, Y) = q et en utilisant la decomposition de la denition 2.2, nous
avons :
St1. S
o
(U
0
, Y) (X
1
Y
1
) = ;
St2. v
i
0
U
0
, v
i
S
o
(U
0
, Y) (v
i
, X
1
Y
1
) ,= 0 ;
St3. (X
s
, X
1
Y
1
) = card(X
s
) = n
s
;
St4. S
o
(U
0
, Y) U
0
= ;
St5. (X
0
, X
1
Y
1
) = 0 ;
St6. Y
0
S
o
(U
0
, Y).
Preuve :
[St1.] Dapr`es les denitions de X
1
et de Y
1
, (X
1
Y
1
)V
ess
(U, Y) = . Or, S
o
(U
0
, Y)
V
ess
(U
0
, Y) V
ess
(U, Y). Nous avons donc S
o
(U
0
, Y) (X
1
Y
1
) = .
[St2.] Dabord, nous allons montrer que, v
i
0
, si (v
i
, X
1
Y
1
) ,= 0 alors v
i
S
o
(U, Y).
Nous savons que v
i
0
et (v
i
, X
1
Y
1
) ,= 0 impliquent que v
i
V
ess
(U, Y). En
eet, si ce netait pas le cas alors dapr`es la relation (2.3), x
j
X
1
, v
i
/ V
ess
(Ux
j
, Y)
et y
k
Y
1
, v
i
/ V
ess
(U, Y y
k
). Or, comme v
i
est directement relie ` a un element de
X
1
Y
1
, il existe un chemin v
i
Y qui est disjoint de tous les chemins formant un
lien U-Y maximal. Cela est equivalent `a dire que (U v
i
, Y) > (U, Y), ce qui est
en contradiction avec le fait que v
i
0
. De plus, non seulement v
i
V
ess
(U, Y) mais
aussi il est le sommet de depart dun chemin V
ess
(U, Y) Y direct. Cela entrane que
v
i
S
o
(U, Y).
En outre,le fait que v
i
soit le debut dun chemin V
ess
(U
0
, Y) Y direct et comme
v
i
V
ess
(U
0
, Y) dapr`es legalite (2.2), induisent aussi que v
i
S
o
(U
0
, Y).
Maintenant nous allons montrer que v
i
0
U
0
, (v
i
, X
1
Y
1
) = 0 v
i
/
S
o
(U
0
, Y).
Supposons quil existe un sommet v
i
0
U
0
tel que (v
i
, X
1
Y
1
) = 0 et v
i
32 2.2. Observabilite totale de letat et de lentree dun syst`eme lineaire structure
S
o
(U
0
, Y).
Evidemment, v
i
S
o
(U
0
, Y) implique que v
i
appartient ` a tout lien U
0
-
Y maximal. Considerons alors un quelconque lien U
0
Y maximal. Ce dernier inclut
necessairement un chemin de la forme P = u
j
. . . v
i
v
j
1
v
j
2
. . . v
j
k
y
t
.
En premier lieu, notons que comme (v
i
, X
1
Y
1
) = 0 alors v
j
1
0
. Ensuite, pour
r > 1, si v
j
r
X
1
alors dapr`es la deduction faite precedemment v
j
r1
S
o
(U
0
, Y).
Neanmoins, cela est impossible car dans tout lien U
0
-Y maximal, nous avons un et un
seul element de S
o
(U
0
, Y) dans chaque chemin. Aussi, v
j
1
, v
j
2
. . . , v
j
k
sont tous elements
de
0
.
Par ailleurs, y
t
/ Y
1
car autrement v
j
k
S
o
(U
0
, Y). Cela conduirait forcement ` a y
t
Y
0
. Or, par denition, nous avons Y
0
V
ess
(U, Y) et dapr`es legalite (2.2), nous aurions
y
t
V
ess
(U
0
, Y), ce qui conduirait ` a y
t
S
o
(U
0
, Y). Ainsi, dans le chemin P, nous
aurions deux elements de S
o
(U
0
, Y). Comme cela est impossible, lhypoth`ese de depart qui
stipule quil existe un element v
i
0
U
0
tel que (v
i
, X
1
Y
1
) = 0 et v
i
S
o
(U
0
, Y)
est fausse. Cela ach`eve la preuve de [St2].
[St3.] Dans tout lien U
0
-Y maximal, il y a n
s
chemins contenant des elements de X
s
et qui arrivent `a un element de Y
1
. De plus, dapr`es [St2.], dans tous ces chemins, tous
les sommets se trouvant entre les elements de X
s
et ceux de Y
1
appartiennent ` a X
1
.
Donc, il existe n
s
chemins disjoints entre X
s
et Y
1
qui ne couvrent que des sommets de
X
s
X
1
Y
1
. Par consequent, (X
s
, X
1
Y
1
) = n
s
.
[St4.] Comme (U
0
, X
1
Y
1
) = 0, nous avons dapr`es [St2] U
0
S
o
(U
0
, Y) = .
[St5.] Vu que X
0
= X(X
s
X
1
), o` u X
s
= S
o
(U
0
, Y)X, nous avons S
o
(U
0
, Y)X
0
= .
Aussi, il est possible de deduire immediatement de [St2] que (X
0
, X
1
Y
1
) = 0.
[St6.] Dapr`es la relation [St2], v
i
S
o
(U
0
, Y) satisfaisant (v
i
, X
1
Y
1
) ,= 0,
nous avons v
i
S
o
(U, Y). Ainsi, S
o
(U
0
, Y) S
o
(U, Y). En outre, U
1
S
o
(U, Y),
U
1
S
o
(U
0
, Y) = et card(S
o
(U, Y)) = q
1
+ q
0
= card(U
1
) + card(S
o
(U
0
, Y)). Donc,
S
o
(U, Y) = S
o
(U
0
, Y)U
1
. Dautre part, Y
0
V
ess
(U, Y) Y
0
S
o
(U, Y) et comme
S
o
(U, Y) = S
o
(U
0
, Y) U
1
, nous avons nalement Y
0
S
o
(U
0
, Y).
Chapitre 2. Observabilite generique de letat et de lentree des syst`emes lineaires structures 33
En resume, avec le lemme precedent nous avons etabli que
_
_
V
ess
(U, Y) = V
ess
(U
0
, Y) U
1
,
(X
s
, X
1
Y
1
) = n
s
,
S
o
(U, Y) = S
o
(U
0
, Y) U
1
= X
s
Y
0
U
1
(X
0
Y
0
, X
1
Y
1
) = 0.
Ces egalites importantes, reetees ` a la gure 2.2, regroupent les principales pro-
prietes de la decomposition graphique de notre syst`eme. Elles vont permettre de sub-
diviser le syst`eme
considere en deux sous-syst`emes particuliers pour lesquels nous
pouvons appliquer les algorithmes de calcul du nombre generique de zeros invariants
[van der Woude, 2000].
Fig. 2.2 Division du syst`eme
2.2.3 Conditions dobservabilite totale de lentree et de letat
Les proprietes de la decomposition proposee `a la denition 2.2, entranent quil nexiste
pas de liens entre X
0
U
0
et X
1
Y
1
. Le syst`eme structure
peut etre decrit par les
34 2.2. Observabilite totale de letat et de lentree dun syst`eme lineaire structure
equations suivantes
_
X
0
(t) = A
0,0
X
0
(t) + A
0,s
X
s
(t) + A
0,1
X
1
(t)+
+B
0,0
U
0
(t) + B
0,1
U
1
(t)
X
s
(t) = A
s,0
X
0
(t) + A
s,s
X
s
(t) + A
s,1
X
1
(t)+
+B
s,0
U
0
(t) + B
s,1
U
1
(t)
X
1
(t) = A
1,s
X
s
(t) + A
1,1
X
1
(t) + B
1,1
U
1
(t)
Y
0
(t) = C
0,0
X
0
(t) + C
0,s
X
s
(t) + C
0,1
X
1
(t)+
+D
0,0
U
0
(t) + D
0,1
U
1
(t)
Y
1
(t) = C
1,s
X
s
(t) + C
1,1
X
1
(t) + D
1,1
U
1
(t)
(2.4)
o` u X
0
, X
s
, U
0
, U
1
, Y
0
and Y
1
representent respectivement les variables associees aux
sommets des ensembles X
0
, X
s
, U
0
, U
1
, Y
0
et Y
1
.
Apr`es la permutation de certaine lignes et colonnes du faisceau de matrices P(s) de
, celui-ci peut etre transforme sous la forme
P(s) =
_
_
_
_
_
_
_
_
_
_
_
A
0,0
sI
n
0
A
0,s
B
0,0
A
0,1
B
0,1
A
s,0
A
s,s
sI
n
s
B
s,0
A
s,1
B
s,1
C
0,0
C
0,s
D
0,0
C
0,1
D
0,1
0 A
1,s
0 A
1,1
sI
n
1
B
1,1
0 C
1,s
0 C
1,1
D
1,1
_
_
_
_
_
_
_
_
_
_
_
.
Notons que [van der Woude et al., 2003] proposent une subdivision en trois sous-syst`emes
similaire `a celle ci-dessus. Dune part, seulement deux sous-syst`emes sont necessaires pour
letude de lobservabilite. Dautre part, la subdivision est ici explicite ce qui nest pas le
cas dans [van der Woude et al., 2003] o` u les auteurs soulignent juste son existence.
En utilisant
P(s), nous allons maintenant enoncer le principal resultat de ce paragraphe
equivalent aux conditions du theor`eme 2.1 :
Chapitre 2. Observabilite generique de letat et de lentree des syst`emes lineaires structures 35
Proposition 2.4. Letat et lentree du syst`eme structure
sont generiquement observ-
ables si et seulement si dans son graphe oriente associe ((
), il existe un graphe partiel
o
G
qui satisfait
Cond1. o
G
couvre tous les sommets de X U;
Cond2. Les sommets x
i
qui seraient couverts par des cycles dans o
G
appartiennent
tous `a X
1
;
Cond3. o
G
contient un lien U
0
-S
o
(U
0
, Y) maximal ayant une longueur egale `a
(U
0
, S
o
(U
0
, Y)) card(S
o
(U
0
, Y)).
Preuve : En premier lieu, nous etablissons la necessite de la condition Cond1
Necessite de la condition Cond1 :
La condition Cond1, qui est equivalente `a lexistence de n + q arcs v-disjoints, implique
que g-rang(P(0)) = n + q. En eet, le nombre darcs v-disjoints dans ((
) est egal au
couplage maximal (maximal matching) dans le graphe biparti [Murota, 1987] quil est
possible dassocier ` a la matrice P(0) et qui est egal ` a g-rang(P(0)).
Par consequent, Cond1 est une condition necessaire ` a lobservabilite generique de lentree
et de letat de
. De plus, Cond1 implique aussi (U, Y) = q, ce qui rend utilisables les
resultats du lemme 2.3.
Evidemment, si cette egalite nest pas veriee, lentree inconnue u ne peut etre observable
et notre analyse peut conclure directement ` a la non validite de la propriete dobservabilite
generique de lentree et de letat du syst`eme
. Dans la suite de la preuve, nous supposons
que la condition Cond1 est veriee et donc que (U, Y) = q.
Subdivision du syst`eme
: Considerons le faisceau de matrices
P(s). Dapr`es legalite
St3 du lemme 2.3, g-rang
_
_
A
1,s
C
1,s
_
_
= (X
s
, X
1
Y
1
) = n
s
. Ainsi P(s) et donc
P(s) sont
de rang plein colonne s C, si et seulement si le faisceau de matrices P
e
(s) est aussi de
36 2.2. Observabilite totale de letat et de lentree dun syst`eme lineaire structure
rang plein colonne s C, o` u
P
e
(s) =
_
_
_
_
_
_
_
_
_
_
_
_
_
_
A
0,0
sI
n
0
A
0,s
B
0,0
A
0,1
B
0,1
0
A
s,0
A
s,s
sI
n
s
B
s,0
A
s,1
B
s,1
0
C
0,0
C
0,s
D
0,0
C
0,1
D
0,1
0
0 I
n
s
0 0 0 0
0 0 0 A
1,1
sI
n
1
B
1,1
A
1,s
0 0 0 C
1,1
D
1,1
C
1,s
_
_
_
_
_
_
_
_
_
_
_
_
_
_
Notons que cette matrice correspond egalement au faisceau de matrices du syst`eme etendu
e
:
_
X
0
(t) = A
0,0
X
0
(t) + A
0,s
X
s
(t) + A
0,1
X
1
(t)+
+B
0,0
U
0
(t) + B
0,1
U
1
(t)
X
s
(t) = A
s,0
X
0
(t) + A
s,s
X
s
(t) + A
s,1
X
1
(t)+
+B
s,0
U
0
(t) + B
s,1
U
1
(t)
X
1
(t) = A
1,s
X
s
(t) + A
1,1
X
1
(t) + B
1,1
U
1
(t)
Y
0
(t) = C
0,0
X
0
(t) + C
0,s
X
s
(t) + C
0,1
X
1
(t)+
+D
0,0
U
0
(t) + D
0,1
U
1
(t)
Y
1
(t) = C
1,s
X
s
(t) + C
1,1
X
1
(t) + D
1,1
U
1
(t)
Y
s
(t) = X
s
(t)
(2.5)
De plus, nous avons (U
0
, Y) = card(U
0
) = q
0
= card(S
o
(U
0
, Y)) = p
0
+ n
s
et donc
P
1
(s)
def
=
_
_
_
_
_
_
_
_
A
0,0
sI
n
0
A
0,s
B
0,0
A
s,0
A
s,s
sI
n
s
B
s,0
C
0,0
C
0,s
D
0,0
0 I
n
s
0
_
_
_
_
_
_
_
_
est une matrice carree. Ainsi,
e
est com-
pose de deux syst`emes :
0
qui a comme entree U
0
, comme vecteur detat X
0
et comme vecteur de sortie
_
_
Y
0
Y
s
_
_
o` u Y
s
= X
s
est un vecteur de sortie virtuel.
1
qui a comme entree le vecteur
_
_
U
1
X
s
_
_
, comme vecteur detat X
1
et comme
vecteur de sortie Y
1
.
Chapitre 2. Observabilite generique de letat et de lentree des syst`emes lineaires structures 37
Cette subdivision est schematisee ` a la gure 2.3. Comme g-rang
_
_
A
1,s
C
1,s
_
_
= (X
s
, X
1
Fig. 2.3 Division du graphe associe ((
) du syst`eme
Y
1
) = n
s
, la matrice P
e
(s) est generiquement de rang plein colonne s C si et seule-
ment si P
1
(s) et P
2
(s) sont toutes deux generiquement de rang plein colonne s C, o` u
P
2
(s)
def
=
_
_
A
1,1
sI
n
1
B
1,1
A
1,s
C
1,1
D
1,1
C
1,s
_
_
.
Necessite et susance des conditions Cond2 et Cond3 :
Concernant P
1
(s) qui represente le faisceau de matrices dun syst`eme carre, nous pou-
vons appliquer le theor`eme 5.1 de [van der Woude, 2000]. Ce theor`eme stipule que le
degre en s du determinant de P
1
(s) est generiquement egal ` a n
0
+ q
0
moins le nombre
minimal darcs dans un lien U
0
-Y
0
X
s
maximal. Ce nombre minimal darcs peut etre
exprime comme (U
0
, Y
0
X
s
) card(Y
0
X
s
). Le degre du determinant de P
1
(s) est
n
0
+q
0
_
(U
0
, S
o
(U
0
, Y)) card(S
o
(U
0
, Y))
_
, avec evidemment S
o
(U
0
, Y) = Y
0
X
s
.
Ce determinant est dierent de zero pour tout s C si et seulement si son degre en s est
nul et g-rang(P
1
(0)) = n
0
+ q
0
+ n
s
. De plus, comme (X
0
U
0
, X
1
U
1
) = 0, lexis-
tence dun graphe partiel v-disjoint qui couvre X
0
U
0
avec les contraintes enoncees dans
Cond2 et Cond3 est necessaire et susant pour garantir que g-rang(P
1
(0)) = n
0
+q
0
+n
s
et que (U
0
, S
o
(U
0
, Y)) = n
0
+q
0
+card(S
o
(U
0
, Y)). En eet, si la longueur du lien U
0
-
S
o
(U
0
, Y) exc`ede la taille donnee par (U
0
, Y
0
X
s
)card(Y
0
X
s
) le nombre darcs ne
serait pas minimal et le degre du determinant de P
1
(s) ne serait pas egal ` a zero. En outre,
si dans le sous-graphe un cycle disjoint couvrant un element de U
0
X
0
est pris en compte,
le degre du determinant de P
1
(s) serait au moins egal a un [van der Woude, 1991]. Ainsi,
P
1
(s) est generiquement de rang plein pour tout s C, i.e. g-rang(P
1
(s)) = n
0
+q
0
+n
s
,
s C.
38 2.2. Observabilite totale de letat et de lentree dun syst`eme lineaire structure
Susance de la condition Cond1 :
Dapr`es le Theor`eme 5.2 de [van der Woude, 2000], adapte au contexte de lanalyse de la
propriete dobservabilite, nous avons :
Si P
2
(s) est generiquement de rang normal plein colonne meme apr`es leacement dune
de ses lignes, choisie arbitrairement, alors, generiquement, le plus grand diviseur commun
de tous les mineurs principaux dordre (n
1
+ q
1
+ n
s
) de P
2
(s) est un monome en s de
degre n
1
+ q
1
+ n
s
moins le nombre maximal darcs dans une union disjointe dun lien
U
1
X
s
Y maximal, dune famille de chemins Y-cime et dune famille de cycles ne
couvrant que des elements de X
1
.
Dune part, Cond1 implique que (U
1
X
s
, Y
1
) = q
1
+ n
s
et que le nombre maximal
darcs dans une union disjointe dun lien U
1
X
s
-Y maximal, dune famille de chemins Y-
cime et dune famille de cycles ne couvrant que des elements de X
1
est egal ` a n
1
+n
s
+q
1
.
Par consequent, si lhypoth`ese stipulant que P
2
(s) est de rang normal plein colonne meme
apr`es leacement dune de ses lignes, choisie arbitrairement, est vraie alors le plus grand
diviseur commun de tous les mineurs principaux dordre (n
1
+ q
1
+ n
s
) de P
2
(s) est un
monome en s de degre 0. Ce qui induirait que g-rang(P
2
(s)) = n
1
+ q
1
+ n
s
s C i.e.
P
2
(s) est generiquement de rang plein pour tout s C.
Nous allons montrer ci-dessous que cette hypoth`ese est vraie. En dautres termes, il faut
montrer que g-rang(P
2,i
(s)) = n
1
+ n
s
+ q
1
, i = 1, . . . , n
1
+ q
1
, o` u P
2,i
(s), pour tout
i = 1, . . . , n
1
+ q
1
, correspond ` a la matrice P
2
(s) apr`es la suppression de sa i
`eme
ligne.
La suppression de la i
`eme
ligne de
_
A
1,1
sI
n
1
B
1,1
A
1,s
_
dans P
2
(s) est equiv-
alente ` a la suppression de tous les arcs arrivant ` a x
i
1
dans le graphe ((
), o` u x
i
1
est la i
`eme
composante du vecteur X
1
. De plus,
_
U x
i
1
, Y
_
> (U, Y) et donc
(S
o
(U, Y) x
i
1
, Y) > (S
o
(U, Y), Y). En outre, dapr`es le lemme 2.3, S
o
(U, Y) =
U
1
X
s
Y
0
. Sachant que Y
1
= Y Y
0
, nous avons alors (U
1
X
s
x
i
1
, Y
1
) >
(U
1
X
s
, Y
1
) = q
1
+n
s
. En consequence, (U
1
X
s
x
i
1
, Y
1
) = q
1
+n
s
+1. En appli-
quant le resultat de [van der Woude, 2000], nous avons donc pour i < n
1
, g-rang(P
2,i
(s))
qui est egal ` a n
1
1 +(U
1
X
s
x
i
1
, Y
1
). Ainsi, g-rang(P
2,i
(s)) = n
1
+q
1
+n
s
pour
Chapitre 2. Observabilite generique de letat et de lentree des syst`emes lineaires structures 39
tout i n
1
.
La suppression de la i
`eme
ligne de
_
C
1,1
D
1,1
C
1,s
_
dans P
2
(s) est equivalente ` a la sup-
pression de tous les arcs arrivant ` a y
i
1
dans le graphe ((
), o` u y
i
1
est la i
`eme
composante
du vecteur Y
1
. Or, par denition de tous les elements de Y
1
, (U, Y) = (U, Y y
i
1
).
Aussi, (S
o
(U, Y), Y) = (U
1
X
s
Y
0
, Y y
i
1
). Comme Y
1
= Y Y
0
, nous avons
alors (U
1
X
s
, Y
1
y
i
1
) = q
1
+n
s
. Toujours, dapr`es [van der Woude, 2000], nous pou-
vons ecrire que g-rang(P
2,i
(s)), pour n
1
< i n
1
+p
1
, est egal ` a n
1
+(U
1
X
s
, Y
1
y
i
1
).
Toutefois, aucun des elements de Y
1
netant essentiel, (U
1
X
s
, Y
1
y
i
1
) = q
1
+ n
s
.
Nous pouvons deduire que pour tout n
1
< i n
1
+ p
1
, g-rang(P
2,i
(s)) = n
1
+ q
1
+ n
s
.
En resume, la condition Cond1 de la proposition 2.4 garantit que :
- le nombre maximal darcs dans une union disjointe dun lien U
1
X
s
Y maximal,
dune famille de chemins Y-cime et dune famille de cycles ne couvrant que des elements
de X
1
est egal ` a n
1
+ n
s
+ q
1
;
- P
2
(s) est de n-rang plein colonne meme apr`es leacement dune de ses lignes, choisie
arbitrairement.
Par consequent, le plus grand diviseur commun de tous les mineurs dordre (n
1
+q
1
+n
s
) de
P
2
(s) est generiquement un mon ome de degre 0 en s. Comme g-rang(P
2
(0)) = n
1
+n
s
+q
1
,
alors P
2
(s) est generiquement de rang plein colonne s C.
En conclusion, g-rang(P
2
(s)) = n + q, s C.
Ainsi, les trois conditions de la proposition 2.4 sont necessaires et susantes pour etablir
quaussi bien P
1
(s) que P
2
(s) sont generiquement de rang plein s C ce qui implique
que P
e
(s) et donc P(s) le sont aussi.
Un corollaire plus simple et plus aisement implementable peut etre deduit de la proposition
2.4 :
Corollaire 2.5. Soit le syst`eme lineaire structure
represente par le graphe oriente
((
). Lentree et letat de
sont generiquement observables si et seulement si dans
((
),
Cond. a.
_
U X, X Y
_
= n + q,
40 2.2. Observabilite totale de letat et de lentree dun syst`eme lineaire structure
Cond. b. X
0
U
0
V
ess
(U
0
, Y
0
X
s
).
Preuve : Dabord, notons que la condition Cond. a. est identique `a la condition
Cond1 de la proposition 2.4. Nous avons donc ` a demontrer seulement que la condition
Cond. b. du corollaire 2.5 est equivalente aux deux conditions Cond2 et Cond3 de la
proposition 2.4.
Necessite :
Si la condition Cond. b. netait pas veriee alors necessairement il existerait des elements
de X
0
U
0
nappartenant pas ` a V
ess
(U
0
, Y
0
X
s
). Cela impliquerait que card(X
0
U
0
) >
(U
0
, S
o
(U
0
, Y)) (U
0
, S
o
(U
0
, Y)). Dans ce cas, nous ne pourrions pas couvrir tous
les elements de X
0
U
0
avec des chemins disjoints dont la longueur totale serait de
(U
0
, S
o
(U
0
, Y)) card(S
o
(U
0
, Y)). Comme, de plus, aucun cycle ne pourrait etre util-
ise pour couvrir les elements de X
0
U
0
, il ne peut donc exister de graphes partiels
v-disjoints couvrant tout X U et satisfaisant aux contraintes Cond2 et Cond3. La
condition Cond. b. du corollaire 2.5 est donc necessaire `a lobservabilite de lentree et de
letat du syst`eme structure
.
Susance : Supposons que la condition Cond. b. soit satisfaite. Elle implique dune part
que (U
0
, Y) = card(U
0
) et dautre part que card(X
0
U
0
) = (U
0
, S
o
(U
0
, Y))
(U
0
, S
o
(U
0
, Y)). Aussi, tous les graphes partiels v-disjoints qui couvriraient X
0
U
0
sont constitues dun lien U
0
-X
s
Y
0
maximal de longueur minimale. Par consequent,
tous les graphes partiels v-disjoints qui couvriraient XU contiennent aussi un lien U
0
-
X
s
Y
0
maximal de longueur minimale, qui lui couvrirait tous les sommets X
0
U
0
ne
contenant pas de cycles incluant des sommets de X
0
X
s
. Cela est susant pour assurer
que les conditions Cond2 et Cond3 de la proposition 2.4 sont satisfaites si la condition
Cond. b. du corollaire 2.5 lest.
Lavantage du corollaire 2.5 est non seulement dans la simplicite de son enonce mais aussi
dans la simplicite de son implementation car cette derni`ere ne fait appel qu` a des algo-
rithmes simples, connus et de complexite polynomiale. Ainsi, pour verier lobservabilite
generique de lentree et de letat dun syst`eme lineaire structure, il sut de :
Chapitre 2. Observabilite generique de letat et de lentree des syst`emes lineaires structures 41
calculer la taille dun couplage maximal dans un graphe biparti,
determiner les ensembles X
0
et U
0
, ce qui revient `a des evaluations et des compara-
isons de tailles de liens maximaux.
Evidemment, la determination des ensembles
X
0
et U
0
necessite le calcul de Y
0
, Y
1
et X
1
notamment. En eet, la condi-
tion Cond. b. peut aussi secrire X
0
U
0
X
s
V
ess
(U
0
, Y
0
X
s
) ou encore
X U
0
X
1
V
ess
(U, Y). Il nest alors plus necessaire deectuer la totalite de la
subdivision.
Laspect algorithmique de lanalyse de lobservabilite de lentree et de letat que nous
proposons est plus detaille dans le chapitre 4.
Enn, notons que les conditions du corollaire 2.5 generalisent explicitement les conditions
bien connues dobservabilite de letat des syst`emes lineaires sans entree inconnue. En eet,
lorsquil ny a pas dentree inconnue i.e. U = , Cond. b. est equivalente ` a X
0
= et
donc ` a ce que chaque sommet etat soit connecte par un chemin `a au moins un sommet de
sortie ou quil existe un chemin Y-cime partant de chaque sommet de X. Dautre part,
la condition Cond. a. est equivalente ` a lexistence dune union disjointe de chemins Y-
cime et de cycles qui couvrirait tous les sommets de X. Ces deux conditions sont celles
de lobservabilite de letat des syst`emes lineaires sans entree inconnue rappelees dans
[Murota, 1987, Reinschke, 1988, Dion et al., 2003].
Exemple 2.2. Considerons le syst`eme structure represente par le graphe oriente de la g-
ure 2.4. Dabord, notons que (U, Y) = 4. Dapr`es la denition 2.2, nous trouvons
0
=
x
1
, x
2
, x
3
, x
4
, x
5
, x
6
, x
7
, x
8
, x
9
, X
1
= x
10
, x
11
, x
12
, x
13
, x
14
, U
0
= u
2
, u
3
, u
4
, U
1
=
u
1
.
`
A partir du separateur de sortie S
o
(U
0
, Y) = x
1
, x
2
, y
4
, nous trouvons lensem-
ble X
s
= x
1
, x
2
. De ce dernier, il est evident que Y
0
= y
4
et Y
1
= y
1
, y
2
, y
3
. De
plus, X
0
= x
3
, x
4
, x
5
, x
6
, x
7
, x
8
, x
9
. Une fois la division est eectuee, il est assez simple
danalyser le syst`eme. En eet, nous pouvons analyser separement les deux sous-graphes
engendres par la decomposition.
Nous constatons que la condition de connectivite `a la sortie est satisfaite et quil existe un
sous-graphe v-disjoint qui couvre tous les sommets etat ainsi que tous les sommets entree
(condition Cond1). De plus, le sommet x
14
est couvert par un cycle et il appartient au
42 2.2. Observabilite totale de letat et de lentree dun syst`eme lineaire structure
Fig. 2.4 Graphe oriente associe au syst`eme de lexemple 2.2
Fig. 2.5 Graphe oriente associe aux sous-ensembles U
0
, X
0
, X
s
et Y
0
de lexemple 2.2
sous-ensemble X
1
(Cond2). Pour le sous graphe constitue par les sous-ensembles U
1
, X
1
et Y
1
, nous notons, `a la gure 2.6, quil existe un sous-graphe o
G
qui couvre tous ces
sommets. Nous pouvons citer par exemple le lien constitue des chemins u
1
x
13
y
5
,
x
12
x
11
x
10
y
1
, x
1
y
2
et x
2
y
3
satisfaisant la condition Cond1.
Pour la partie constituee des ensembles U
0
, X
0
, X
s
et Y
0
il ny a que la condition Cond3
`a verier. Dailleurs, `a la gure 2.5, nous notons que dans un lien U
0
-S
o
(U
0
, Y) maxi-
mal, (U
0
, S
o
(U
0
, Y)) = 10 et card(S
o
(U
0
, Y)) = 3, la longueur maximale pour couvrir
Chapitre 2. Observabilite generique de letat et de lentree des syst`emes lineaires structures 43
tout letat et lentree est donc de 7. Par ailleurs, card(X
0
U
0
) = 12 ; en consequence, le
syst`eme nest pas generiquement observable puisquil nest pas possible de determiner un
sous-graphe qui couvre X
0
U
0
avec seulement 7 arcs disjoints. Dautre part, si nous calcu-
Fig. 2.6 Graphe oriente associe aux sous-ensembles U
1
, X
s
, X
1
et Y
1
de lexemple 2.2
lons lensemble des sommets essentiels V
ess
(U
0
, X
s
Y
0
) = u
2
, u
3
, u
4
, x
1
, x
2
, x
6
, x
7
, y
4
,
nous constatons que tous les sommets X
0
U
0
ne sont pas inclus dans lensemble V
ess
(U
0
, X
s
Y
0
). Ainsi, la condition Cond.b. du corollaire 2.5 nest pas satisfaite. De plus, il ny a pas
de sous graphe qui couvre tout letat et lentree inconnue avec un maximum de n+q = 18
arcs v-disjoints. En eet, il ny que 14 arcs v-disjoints pour couvrir tout letat et lentree
inconnue. En conclusion, apr`es avoir etudie le syst`eme avec la proposition 2.4 et le corol-
laire 2.5, il sav`ere que le syst`eme nest pas generiquement observable. Dans la section
suivante, nous allons pouvoir determiner les composantes des vecteurs dentree inconnue
et detat observables.
44 2.3. Observabilite partielle de letat et de lentree dun syst`eme lineaire structure
2.3 Observabilite partielle de letat et de lentree dun
syst`eme lineaire structure
Le second probl`eme aborde dans cette partie concerne la caracterisation de lobservabil-
ite dun ensemble donne de composantes des vecteurs dentree et detat. Plus precisement,
il sagit de determiner quelles parties de letat et de lentree sont fortement observables. Ce
probl`eme est particuli`erement interessant lorsque lanalyse precedente a revele que letat
et lentree inconnue netaient pas generiquement observables.
2.3.1 Position du probl`eme
En premier lieu, les syst`emes etudies etant structures, lobservabilite dune fonction-
nelle L
_
_
x
u
_
_
na de sens que si la matrice L est formee de vecteurs de la base canonique
i.e. L
_
_
x
u
_
_
= (x
i
1
, x
i
2
, . . . , x
i
k
, u
j
1
, u
j
2
, . . . , u
j
)
T
.
Aussi, le probl`eme pose est de savoir si la composante de letat x
i
ou de lentree u
j
est fortement observable. La denition dobservabilite forte donnee dans [Hautus, 1983,
Basile et Marro, 1969] pour tout un syst`eme est appliquee ici `a une composante de letat
ou de lentree et ce dans le contexte dun syst`eme structure :
Denition 2.3. La composante de letat x
i
(respectivement de lentree u
j
) du syst`eme
lineaire structure
est generiquement fortement observable lorsque pour tout etat initial
x
0
et pour tout signal dentree u(t), legalite y(t) = 0, t 0 implique x
i
(t) = 0, t 0
(respectivement u
j
(t) = 0, t > 0).
Ainsi, lobservabilite forte dune composante de letat ou de lentree est equivalente
` a dire quune variation de cette composante est necessairement traduite par une varia-
tion des mesures quelles que soient les variations des autres composantes de letat et de
lentree. Cela est aussi equivalent ` a dire quil est possible dexprimer cette composante
seulement en fonction des composantes de sortie et de leurs derivees.
Chapitre 2. Observabilite generique de letat et de lentree des syst`emes lineaires structures 45
Notre objectif, dans un premier temps, est de trouver des conditions graphiques qui carac-
terisent lobservabilite forte dune composante donnee de letat x
i
ou de lentree u
j
de
.
Ensuite, nous caracteriserons lensemble de toutes les composantes de letat et de lentree
qui sont fortement observables.
En utilisant le sous-espace dobservabilite
deni par la sequence 2.1, nous pouvons
aisement etablir que :
Theor`eme 2.6. Soit le syst`eme lineaire structure
represente par le graphe oriente
((
). Une composante de letat x
i
(resp. une composante de lentree u
j
) est generique-
ment fortement observable si et seulement si generiquement e
i
(resp. e
n+j
),
o` u e
k
R
n+q
est le k
`eme
vecteur de la base canonique de R
n+q
.
Notons que les deux conditions du theor`eme 2.6 sont equivalentes respectivement ` a
g-dim(
+ Im(e
i
)) = g-dim(
) et g-dim(
+ Im(e
n+j
)) = g-dim(
) ou encore `a
g-dim(
i
+ Im(e
i
)) = g-dim(
) (2.6)
et
g-dim(
n+j
) = g-dim(
) (2.7)
o` u
k
represente lelement maximal de la sequence
_
_
_
0
E,
A,
C
= Im
_
C
T
_
+ Im(e
k
)
i+1
E,
A,
C
=
i
E,
A,
C
+
A
T
E
_
i
E,
A,
C
Im
_
E
T
_
_
(2.8)
En eet
k
represente lespace dobservabilite forte dans lespace etendu
_
_
x
u
_
_
en ra-
joutant comme mesure au syst`eme y
p+1
= x
k
si k n ou y
p+1
= u
nk
si k > n.
2.3.2 Denitions et notations
Dautres denitions necessaires ` a la formulation des conditions dobservabilite forte
dune composante de letat et/ou de lentree viennent completer celles enoncees au para-
graphe 1.2.2. Notamment, il est necessaire de parametrer les ensembles U
0
, U
1
, X
0
, X
s
,
46 2.3. Observabilite partielle de letat et de lentree dun syst`eme lineaire structure
X
1
, Y
0
et Y
1
denis dans le paragraphe 2.2.2 par un ensemble de sommets V. Nous
denissons alors :
Denition 2.4. Pour tout ensemble de sommets V tel que Y V X Y, nous
denissons les ensembles de sommets suivants :
X(V)
def
= X (V X),
U(V) U tel que card
_
U(V)
_
=
_
U, V
_
=
_
U(V), V
_
et
_
U(V), V
_
=
_
U, V
_
.
Il est clair que lensemble
U(V) existe toujours mais il nest pas necessairement unique.
X
1
(V)
def
=
_
x
i
X(V) [
_
U x
i
, V
_
>
_
U, V
_
_
,
0
(V)
def
=
_
v
i
V[
_
U, V
_
>
_
U, V v
i
__
= V V
ess
(U, V),
1
(V)
def
= V
0
(V),
U
0
(V)
def
=
_
u
i
U(V) [
_
u
i
, X
1
(V)
1
(V)
_
= 0
_
,
U
1
(V)
def
=
U(V) U
0
(V),
S
o
(V)
def
= S
o
(U
0
(V), V),
X
s
(V)
def
= S
o
(V)
X(V).
X
0
(V)
def
=
X(V) (X
1
(V) X
s
(V)).
1
(V) est le nombre maximal de sommets de X
1
(V) X
s
(V) U
1
(V) couverts par une
union disjointe
- dun lien X
s
(V) U
1
(V)-
1
(V) de taille
_
X
s
(V) U
1
(V),
1
(V)
_
,
- dune famille de chemins X
1
(V)-
1
(V) simples
- dune famille de cycles ne couvrant que des elements de X
1
(V).
0
(V)
def
=
_
U
0
(V), S
o
(V)
_
_
U
0
(V), S
o
(V)
_
,
(V)
def
=
1
(V) +
0
(V) + card
_
V Y
_
.
En sinspirant des conditions geometriques du theor`eme 2.6, lensemble V represente
un ensemble de sorties virtuelles regroupant les mesures vraies Y ainsi que les composantes
de letat et de lentree dont on veut etudier lobservabilite forte. Cela correspond au
calcul du sous-espace
k
. Par ailleurs, letude de lobservabilite forte des composantes
de lentree peut se limiter aux composantes des elements de
U(V) car il est aise de voir
que les autres composantes de lentree ne peuvent etre fortement observables. En eet,
Chapitre 2. Observabilite generique de letat et de lentree des syst`emes lineaires structures 47
en utilisant les resultats de [Commault et al., 1997], o` u les auteurs traitent du probl`eme
de rejet de perturbations, les composantes de lentree associees aux sommets inclus dans
U
U(V) peuvent etre rendues inobservables en utilisant les autres entrees. En dautres
termes, il existe des composantes de lentree associees aux sommets de
U(V) telles que
les sorties associees aux sommets de V ne sont pas sensibles aux composantes associees
` a U
U(Y). Par consequent, il est clair que les composantes associees aux sommets de
U
U(Y) ne sont pas fortement observables.
2.3.3 Condition dobservabilite dun ensemble donne de com-
posantes de letat et de lentree
Une etape importante `a lanalyse de lobservabilite forte dune composante de letat
ou de lentree est la caracterisation geometrique de la dimension generique du sous-espace
dobservabilite
. Cette dimension est liee au nombre de zeros invariants du faisceau de
matrices P(s) du syst`eme. En eet, en supposant que P(s) soit generiquement de rang
normal plein et en generalisant aux syst`emes structures des resultats fort connus et rap-
peles dans [Trentelman et al., 2001], nous avons g-dim(
) = n + q g-n
invz
(P(s)) o` u
g-n
invz
(P(s)) est le nombre generique de zeros invariant de P(s) caracterise graphique-
ment dans [van der Woude, 2000].
Le premier lemme ci-dessous est consacre ` a la caracterisation graphique du nombre generique
de zeros invariants du syst`eme structure
.
Evidemment, nous pouvons pour cela utiliser
les resultats de [van der Woude et al., 2003]. Cependant, pour des raisons dhomogeneite
et comme la decomposition dans notre cas est explicite, nous etablirons le calcul de ce
nombre en utilisant les notations de la denition 2.4. Nous notons q = card(
U(V)) comme
resultat de la discussion menee dans la section precedente. Le lemme suivant donne une
caracterisation du nombre g-n
invz
(P(s)) en relation avec la fonction :
Lemme 2.7. Considerons le syst`eme structure
represente par le graphe oriente ((
).
Nous avons
n + q g-n
invz
(P(s)) = (Y)
48 2.3. Observabilite partielle de letat et de lentree dun syst`eme lineaire structure
Preuve : Appliquee au sous-ensemble V = Y, la decomposition de la denition 2.4 est
identique ` a celle de la denition 2.2. Nous gardons donc les memes notations que dans la
preuve de la proposition 2.4. Cependant, comme les composantes associees aux sommets de
U
U(Y) ne sont pas fortement observables, nous allons restreindre le syst`eme aux entrees
representees par les elements de
U(Y). Ainsi, nous obtenons un syst`eme generiquement
de n-rang plein. Aussi, nous notons par
B
(resp.
D
) les sous-matrices de B
(resp.
D
) associees aux entrees de
U(Y). Les matrices
B
(resp.
D
) sont donc constituees
de la concatenation des colonnes B
j
(resp. D
j
) de B
(resp. D
) o` u u
j
U(Y). De
plus, nous notons par
P(s) =
_
_
A
sI
n
B
_
_
le faisceau de matrices du syst`eme
(A
,
B
, C
,
D
).
Nous reutilisons les notations n
0
= card(X
0
(Y)), n
s
= card(X
s
(Y)), n
1
= card(X
1
(Y)),
q
0
= card(U
0
(Y)), q
1
= card(U
1
(Y)), p
0
= card(
0
(Y)) et p
1
= card(
1
(Y)) ainsi que
celles de la recriture du syst`eme etendu (2.4). Le nombre generique de zeros invariants de
P(s) est evidemment egal ` a celui du faisceau de matrices P
e
(s), o` u
P
e
(s) =
_
_
_
_
_
_
_
_
_
_
_
_
_
_
A
0,0
sI
n
0
A
0,s
B
0,0
A
0,1
B
0,1
0
A
s,0
A
s,s
sI
n
s
B
s,0
A
s,1
B
s,1
0
C
0,0
C
0,s
D
0,0
C
0,1
D
0,1
0
0 I
n
s
0 0 0 0
0 0 0 A
1,1
sI
n
1
B
1,1
A
1,s
0 0 0 C
1,1
D
1,1
C
1,s
_
_
_
_
_
_
_
_
_
_
_
_
_
_
=
_
_
P
1
(s) P
1,1
(s)
0 P
2
(s)
_
_
et P
1
(s)
def
=
_
_
_
_
_
_
_
_
A
0,0
sI
n
0
A
0,s
B
0,0
A
s,0
A
s,s
sI
n
s
B
s,0
C
0,0
C
0,s
D
0,0
0 I
n
s
0
_
_
_
_
_
_
_
_
, P
2
(s)
def
=
_
_
A
1,1
sI
n
1
B
1,1
A
1,s
C
1,1
D
1,1
C
1,s
_
_
.
Dapr`es [van der Woude, 2000] g-rang(P
1
(s)) est egal au nombre de lignes de P
1
(s) et
g-rang(P
2
(s)) est egal au nombre de colonnes de P
2
(s). Ainsi, en comptant les zeros in-
variants avec leur multiplicite, le nombre generique de zeros invariants de P
e
(s) est egal ` a
la somme des nombres generiques de zeros invariants de P
1
(s) et de P
2
(s).
Chapitre 2. Observabilite generique de letat et de lentree des syst`emes lineaires structures 49
Dune part, en appliquant le theor`eme 5.1 de [van der Woude, 2000], nous savons que le
nombre generique de zeros invariants de P
1
(s) est egal ` a n
0
+n
s
+q
0
_
U
0
(Y), S
o
(U
0
(Y), Y)
_
+
_
U
0
(Y), S
o
(U
0
(Y), Y)
_
n
s
.
Notons que la presence du terme n
s
est due au fait que la sortie du syst`eme
1
est Y
s
et
non X
s
.
Dautre part, dapr`es le theor`eme 5.2 de [van der Woude, 2000], le nombre generique de
zeros invariants de P
2
(s) est egal ` a n
1
+n
s
+q
1
moins le nombre maximal de sommets de
X
1
(Y) X
s
(Y) U
1
(Y) couverts par une union disjointe :
- dun lien X
s
(Y) U
1
(Y)-
1
(Y) de taille
_
X
s
(Y) U
1
(Y),
1
(Y)
_
,
- dune famille de chemins X
1
(Y)-
1
(Y) simples,
- dune famille de cycles ne couvrant que des elements de X
1
(Y).
Par consequent, en exploitant les notations de la denition 2.4, le nombre generique de
zeros invariants de P
e
(s), et donc aussi de P(s), est egal `a n
0
+ q
0
+ n
1
+ n
s
+ q
1
0
(Y)
1
(Y) = n + q
0
(Y)
1
(Y). Nous en deduisons alors que la dimension
generique de lespace dobservabilite forte de
, note
, est egal `a n + q g-n
invz
=
1
(Y) +
_
U
0
(Y), S
o
(U
0
(Y), Y)
_
_
U
0
(Y), S
o
(U
0
(Y), Y)
_
=
1
(Y) +
0
(Y) = (Y).
Le lemme precedent permet donc de caracteriser graphiquement la dimension de lespace
dobservabilite forte de
dans lespace detat etendu (x
T
, u
T
)
T
. La condition neces-
saire et susante dobservabilite forte se deduit alors immediatement de ce lemme. En
eet, si (Y) < n + q alors letat et lentree de
ne sont pas generiquement observ-
ables. Il peut alors etre interessant de savoir si une composante x
i
quelconque de letat
ou u
j
de lentree est generiquement fortement observable. Pour cela, il sut de com-
parer (Y x
i
) (resp. (Y u
j
)) ` a (Y). En eet, cela revient ` a comparer la
dimension generique de
i
(resp.
n+j
) ` a celle de
pour verier la condition dob-
servabilite forte (2.6) de x
i
(resp. la condition dobservabilite forte (2.7) de u
j
). En fait,
rajouter une mesure virtuelle sur la composante de letat x
i
(resp. la composante de
lentree u
j
) est equivalent ` a rajouter sur le graphe oriente de
un sommet de sortie
50 2.3. Observabilite partielle de letat et de lentree dun syst`eme lineaire structure
y
p+1
et un arc (x
i
, y
p+1
) (resp. (u
j
, y
p+1
)). Pour le nouveau syst`eme ainsi obtenu, le
calcul de la dimension generique de lespace dobservabilite forte dans lespace etendu
(x
T
, u
T
)
T
peut etre eectue en utilisant lexpression (Y y
p+1
). Cependant, cela
necessiterait la denition et le trace dun nouveau graphe oriente avec une nouvelle com-
posante de sortie y
p+1
et un arc (x
i
, y
p+1
) (resp. (u
j
, y
p+1
)). Pour des raisons de sim-
plicite, nous avons choisi de travailler avec un graphe oriente unique. Nous ne rajoutons
donc pas delements au graphe original mais lidee est de considerer le sommet x
i
(resp.
u
j
) comme un sommet de sortie. Ainsi, il est assez aise de deduire ` a partir du lemme
2.7 que (V) =
1
(V) +
_
U
0
(V), S
o
(V)
_
_
U
0
(V), S
o
(V)
_
+ card
_
V Y
_
, pour
V = Y x
i
(resp. V = Y u
j
), represente la dimension generique de
i
(resp.
n+j
). Nous pouvons alors deduire :
Proposition 2.8. Soit le syst`eme lineaire structure
represente par le graphe oriente
((
). Une composante de letat x
i
(resp. une composante de lentree u
j
) est generique-
ment fortement observable si et seulement si x
i
1
obs
def
=
_
v X U, (Y v) =
(Y)
_
(resp. u
j
1
obs
)
Preuve : La preuve de cette proposition est assez immediate dapr`es le lemme 2.7
et la discussion qui sen est suivie. En resume, la composante de letat ou de lentree
est fortement observable si et seulement si une mesure de cette composante rajoutee au
syst`eme ne change pas la dimension de lespace dobservabilite forte. En utilisant les
notations de la denition 2.4, cela revient ` a dire que la composante de letat x
i
(resp. la
composante de lentree u
j
) est fortement observable si et seulement si (Y) = (Yx
i
)
(resp. (Y) = (Y u
j
))
Exemple 2.3. Considerons le syst`eme lineaire structure represente par le graphe oriente
montre `a la gure 2.7. Le graphe est similaire `a lexemple 2.2 mais notons que pour
cet exemple (U, Y) = 4 et quil y a 5 entrees inconnues. Nous observons que (U
u
5
, Y) = (U, Y) et (U u
5
, Y) = (U, Y). Il est donc aise de conclure que
U(Y) = u
1
, u
2
, u
3
, u
4
.
Nous nous sommes interesses `a trouver les etats et les entrees inconnues qui ne
Chapitre 2. Observabilite generique de letat et de lentree des syst`emes lineaires structures 51
Fig. 2.7 Graphe oriente associe au syst`eme de lexemple 2.3
sont pas fortement observables. Pour cela, dapr`es les resultats precedents, nous devons
chercher lensemble des sommets qui appartiennent au sous-espace observable 1
obs
et ainsi
determiner le sous-ensemble inobservable.
Tout dabord, nous calculons la dimension du sous-espace dobservabilite avec les sor-
ties originelles Y. Pour faire cela, nous appliquons la denition 2.4 pour V = Y. Nous
avons
X(Y) = X et
U(Y) = u
1
, u
2
, u
3
, u
4
. Ainsi, nous trouvons X
1
(Y) = x
9
, x
10
, x
11
,
x
12
, x
13
,
1
(Y) = y
1
, y
2
, y
3
, y
5
,
0
(Y) = y
4
, U
1
(Y) = u
1
et U
0
(Y) =
u
2
, u
3
, u
4
. Dapr`es le separateur de sortie S
o
(Y) = x
1
, x
2
, y
4
, nous trouvons lensem-
ble X
s
(Y) = x
1
, x
2
et donc, X
0
(Y) = x
3
, x
4
, x
5
, x
6
, x
7
, x
8
.
Nous pouvons `a present analyser separement les deux sous graphes engendres par
la decomposition. Nous constatons que le nombre maximal de chemins disjoints est
_
U
0
(Y), S
o
(Y)
_
= 3 et le minimum de sommets couverts par ces chemins disjoints
est donne par
_
U
0
(Y), S
o
(Y)
_
= 10, ce qui implique
0
(Y) = 7 dapr`es la denition
2.4.
52 2.3. Observabilite partielle de letat et de lentree dun syst`eme lineaire structure
Fig. 2.8 Graphe oriente associe aux ensembles U
0
(Y), X
0
(Y), X
s
(Y) et
0
(Y) de
lexemple 2.3
Pour le calcul de
1
(Y), nous cherchons le maximum de sommets de U
1
(Y)X
s
(Y)
X
1
(Y) couverts par lunion disjointe dun lien X
s
(Y) U
1
(Y)-
1
(Y) de taille
_
X
s
(Y) U
1
(Y),
1
(Y)
_
, une famille de chemins X
1
(Y)-
1
(Y) simples et une famille
de cycles ne couvrant que des elements de X
1
(Y). Nous pouvons citer par exemple :
- le lien X
s
(Y) U
1
(Y)-
1
(Y) de taille
_
X
s
(Y) U
1
(Y),
1
(Y)
_
= 3 compose
par les chemins : u
1
x
12
y
5
, x
1
y
2
, x
2
y
3
,
- le chemin X
1
(Y)-
1
(Y) simple x
11
x
10
x
9
y
1
et
- le cycle couvrant x
13
de X
1
(Y).
il se trouve que cette conguration couvre une quantite maximale de sommets (8 sommets)
et donc dapr`es la denition 2.4,
1
(Y) = 8. En consequence, (Y) = 7 + 8 = 15. La
dimension de lespace generiquement observable etant plus petite que celle de lespace
etendu (x
T
, u
T
)
T
, il est alors evident que le syst`eme nest pas totalement generiquement
observable(pour lobservabilite totale avec les entrees du syst`eme,(Y) = n + q ).
`
A present, nous allons chercher les composantes de letat et de lentree inconnue qui,
en les mesurant, peuvent rendre plus grande la valeur de et donc la dimension de lespace
observable. Nous constatons que tous les sommets de U
1
(Y)X
s
(Y)X
1
(Y) sont couverts
et donc que la condition Cond. a. du corollaire 2.5 est satisfaite. Une mesure sur lune
des composantes de U
1
(Y) X
s
(Y) X
1
(Y) naugmentera pas la dimension de
1
(Y)
Chapitre 2. Observabilite generique de letat et de lentree des syst`emes lineaires structures 53
Fig. 2.9 Graphe oriente associe aux ensembles U
1
(Y), X
s
(Y), X
1
(Y) et
1
(Y) de
lexemple 2.3
et, par consequent, tous ces sommets se trouvent dans lespace dobservabilite du syst`eme.
En revanche, il est evident que les sommets appartenant `a lensemble U
0
(Y) X
0
(Y) du
graphe ne peuvent pas etre tous couverts par 3 chemins U
0
(Y)-S
o
(Y) disjoints contenant
10 sommets seulement. Cela signie que tous les sommets dans U
0
(Y)X
0
(Y) ne sont pas
essentiels. En eet, lensemble des sommets essentiels est donne par V
ess
(U
0
(Y),
0
(Y)
X
s
(Y)) = u
2
, u
3
, u
4
, x
1
, x
2
, x
6
, x
7
, y
4
et donc la condition Cond. b. du corollaire 2.5
nest pas satisfaite.
Il est evident que considerer lun des sommets detat x
1
et/ou x
2
dans V est inu-
tile. Supposons alors que le sommet x
4
soit mesure. Nous avons alors V = Y x
4
et
X(V) = X x
4
.
U(V) = u
1
, u
2
, u
3
, u
4
reste le meme et le nombre maximal
de chemins
U(V)-V disjoints reste aussi egal `a 4. Dans ce cas, nous constatons que
(
U(V), V) = 4 < (
U(V)x
4
, V) = 5. Ainsi, X
1
(V) = x
1
, x
2
, x
3
, x
4
, x
5
, x
9
, x
10
, x
11
,
x
12
, x
13
,
1
(V) = y
1
, y
2
, y
3
, y
4
, y
5
,
0
(V) = . U
1
(V) = u
1
, u
2
, U
0
(V) =
u
3
, u
4
, X
s
(V) = x
6
, x
7
et X
0
(V) = x
8
.
Pour calculer
1
(V) nous trouvons
- un lien X
s
(V) U
1
(Y)-
1
(Y) de taille
_
X
s
(Y) U
1
(Y),
1
(Y)
_
= 4. Par ex-
emple, u
1
x
12
y
5
, u
2
x
3
x
1
y
2
, x
7
x
5
x
2
y
3
et x
6
y
4
qui
54 2.3. Observabilite partielle de letat et de lentree dun syst`eme lineaire structure
Fig. 2.10 Graphe oriente associe au aux ensembles U
1
(V), X
1
(V), X
s
(V) et
1
(V) de
lexemple 2.3
couvre 9 sommets,
- Deux chemins X
1
(Y)-
1
(Y) simples x
11
x
10
x
9
y
1
et x
4
y
6
qui
couvrent 4 sommets et
- un cycle qui couvre x
13
tous ces sommets formant une union disjointe et couvrant la totalite des sommets de
U
1
(Y) X
s
(Y) X
1
(Y). Il est donc aise de voir que
1
(V) = 14.
Pour
0
(V), nous avons deux chemins U
0
(Y)-S
o
(Y) disjoints couvrant un minimum
de
_
U
0
(V), S
o
(V)
_
= 4 sommets et donc
0
(V) = 2. Nous concluons que (Yx
4
) =
16 et que le sommet x
4
nappartient pas au sous-ensemble observable. En fait, nous avons
(Y x
3
) = (Y x
4
) = (Y x
5
) = (Y x
6
).
Par ailleurs, considerons V = Y x
8
et donc
X(Y) = X x
8
. Dans ce cas
U(V) = U et il y a 5 chemins
U(V)-(V) disjoints. La decomposition du syst`eme nous
donne X
1
(V) = x
9
, x
10
, x
11
, x
12
, x
13
,
1
(V) = y
1
, y
2
, y
3
, y
5
,
0
(V) = x
4
, y
4
,
U
1
(V) = u
1
et U
0
(V) = u
2
, u
3
, u
4
, u
5
. Dapr`es le separateur de sortie S
o
(V) =
u
1
, x
1
, x
2
, x
8
, y
4
, nous trouvons lensemble X
s
(V) = x
1
, x
2
et donc X
0
(V) = x
3
, x
4
,
Chapitre 2. Observabilite generique de letat et de lentree des syst`emes lineaires structures 55
Fig. 2.11 Graphe oriente associe aux ensembles U
0
(Y), X
0
(Y), X
s
(Y) et
0
(Y) de
lexemple 2.3
x
5
, x
6
, x
7
.
Nous constatons quil y a 4 chemins U
0
(V)-X
s
(V)
0
(V) disjoints qui peuvent
couvrir un minimum de 11 sommets v-disjoints et donc
0
(Yx
8
) = 11. Pour
1
(V) il
est aise de voir quil a la meme valeur que
1
(Y) et donc
1
(Yx
8
) = 6. Finalement,
(Y x
8
) = 17 ,= (Y) et nous concluons que le sommet detat x
8
/ 1
obs
.
Ainsi nalement, nous trouvons que (Y) = (Yu
1
, x
1
, x
2
, x
6
, x
7
, x
9
, x
10
, x
11
, x
12
,
x
13
). Le sous-espace observable est donc 1
obs
= u
1
, x
1
, x
2
, x
7
, x
9
, x
10
, x
11
, x
12
, x
13
.
2.3.4 Observabilite forte de letat dun syst`eme lineaire struc-
ture
La derni`ere partie de ce chapitre est dediee `a letude de lobservabilite forte dune par-
tie de letat. Cette propriete est importante lorsquil est interessant de savoir si des entrees
exog`enes, comme des defauts par exemple, peuvent alterer lobservabilite du syst`eme. Ce
cas detude a aussi ete designe par le vocable observabilite tolerante aux defauts et a ete
aborde dans [Staroswiecki, 2006] en utilisant des graphes bipartis. Cet outil conduit neces-
sairement `a faire lhypoth`ese que les entrees exog`enes sont lentement variables. A limage
de toute lanalyse realisee jusque l` a, nous ne ferons pas cette hypoth`ese. Par ailleurs, lanal-
yse et la synth`ese des divers schemas dobservation possibles pour un syst`eme distribue
seraient aussi un contexte o` u letude de lobservabilite de letat peut saverer utile. En ef-
fet, il est classique [Saif et Guan, 1992, Hou et M uller, 1994] pour les syst`emes distribues
ayant divers types dinterconnexions de considerer des schemas dobservation autonomes
56 2.3. Observabilite partielle de letat et de lentree dun syst`eme lineaire structure
qui se basent sur des observateurs ` a entrees inconnues o` u pour chaque sous-syst`eme, letat
et les entrees des autres sous-syst`emes sont consideres comme etant des entrees inconnues.
Dans ce court paragraphe sont donnees les conditions necessaires et susantes graphiques
dobservabilite de tout letat dun syst`eme lineaire.
La denition de lobservabilite forte generique dun syst`eme lineaire est deduite de
[Basile et Marro, 1969, Hautus, 1983] qui en donnent aussi les caracterisations algebriques
et geometriques. En generalisant ces denitions et resultats aux syst`emes structures, nous
pouvons denir la notion dobservabilite de letat ainsi :
Denition 2.5. Letat et lentree du syst`eme lineaire structure
sont generiquement
observables lorsque pour tout etat initial x
0
et pour tout signal dentree u(t), legalite
y(t) = 0, t 0 implique x(t) = 0, t 0.
Cette denition est relative `a un cas particulier de lobservabilite forte dune partie de
letat et/ou de lentree explicitee dans la denition 2.3.
Une condition algebrique necessaire et susante `a lobservabilite forte generique de letat
de
est deduite de [Trentelman et al., 2001] :
Theor`eme 2.9. Le syst`eme structure
est generiquement fortement observable si et
seulement si
s C, g-rang(P(s)) = n + g-rang
_
_
B
_
_
Evidemment, une condition graphique necessaire et susante peut etre deduite de la
proposition 2.8 :
Corollaire 2.10. Le syst`eme lineaire structure
represente par le graphe oriente ((
)
est generiquement fortement observable si et seulement si (Y X) = (Y).
Cependant, une autre condition plus simple `a mettre en uvre est envisageable. Par-
tant du corollaire 2.5 et de la preuve de la proposition 2.4, nous pouvons etablir :
Chapitre 2. Observabilite generique de letat et de lentree des syst`emes lineaires structures 57
Corollaire 2.11. Soit le syst`eme lineaire structure
represente par le graphe oriente
((
). Letat de
est generiquement fortement observable si et seulement si dans ((
)
Cond. a. X
0
V
ess
(U
0
, Y
0
X
s
),
Cond. b.
_
U
1
X
s
X
1
, X
1
Y
1
_
= n
s
+ n
1
+
_
U
1
, X
1
Y
1
_
.
Preuve : Dabord, nous denissons
U U tel que card
_
U
_
=
_
U, Y
_
=
_
U, Y
_
et
U, Y
_
=
_
U, Y
_
.
U nest pas unique mais existe toujours. Son unicite nest pas, pour
la presente demonstration, tr`es importante. La preuve est assez immediate en remarquant
que lobservabilite forte de letat pour
est equivalente ` a lobservabilite forte de letat
et de lentree du syst`eme
deni par le quadruple (A
,
B
, C
,
D
) o` u
B
(resp.
D
)
represente la sous-matrice de B
(resp. D
) associee aux entrees de
U i.e. les matrices
B
(resp.
D
) sont constituees de la concatenation des colonnes B
j
(resp. D
j
) de B
(resp.
D
) o` u u
j
U.
En eet,
etant par construction inversible ` a gauche, lobservabilite totale de son entree
et de son etat est alors equivalente ` a son observabilite forte qui est elle meme equivalente
` a lobservabilite forte de
. Les conditions Cond. a. et Cond. b. sont deduites di-
rectement du corollaire 2.5.
Exemple 2.4. Nous presentons ici un exemple simple pour verier la condition dobserv-
abilite forte. Considerons le syst`eme associe au graphe oriente de la gure 2.12. Il faut
Fig. 2.12 Graphe oriente associe au syst`eme de lexemple 2.4
dabord noter que u
3
rend inobservable `a u
2
(et vice-versa) puisque card
_
U u
3
_
=
58 2.4. Conclusion
_
U, Y
_
=
_
U u
3
, Y
_
= 2 et
_
U u
3
, Y
_
=
_
U, Y
_
= 8. Choisissons
U =
u
1
, u
2
(
U = u
1
, u
3
peut aussi etre choisi).
Dapr`es la denition 2.2, pour lensemble
U choisi, nous obtenons :
0
= x
7
, x
8
, x
9
,
X
1
= x
1
, x
2
, x
3
, x
4
, x
5
, x
6
, U
0
= u
2
et U
1
= u
1
. Dapr`es le separateur S
o
= x
7
,
nous avons egalement X
s
= x
7
. De ce dernier, il est evident que Y
0
= et Y
1
= Y.
Finalement, X
0
= x
8
, x
9
.
Avec ces sous-ensembles calcules, nous constatons facilement que le nombre maximal
darcs disjoints couvrant un lien U
1
X
s
X
1
-X
1
Y
1
est
_
U
1
X
s
X
1
, X
1
Y
1
_
= 8.
En eet, 8 arcs v-disjoints peuvent couvrir le lien compose des chemins u
1
x
5
y
1
,
x
4
x
3
x
2
y
2
, x
7
x
1
y
3
et x
6
x
6
par exemple. Le nombre maximal darcs
disjoints couvrant un lien U
1
-X
1
Y
1
est
_
U
1
, X
1
Y
1
_
= 1 par exemple u
2
x
5
.
Etant donne que n
s
+ n
1
= 7, la condition Cond. b. es veriee.
Pour la partie composee des ensembles U
0
, X
0
, X
s
et Y
0
, nous constatons que dans un
lien U
0
-X
s
, le sommet x
9
nest pas essentiel, dailleurs
_
U
0
, Y
_
=
_
U x
9
, Y
_
= 1.
En conclusion le syst`eme nest pas fortement observable.
2.4 Conclusion
Dans ce chapitre, divers probl`emes dobservabilite des syst`emes lineaires ` a entrees in-
connues ont ete abordes par une approche graphique. En premier lieu, nous avons donne
les conditions necessaires et susantes ` a lobservabilite generique simultanee de lentree
et de letat. Ces conditions sont aisement veriables car elle ne font appel qu` a des algo-
rithmes classiques de la theorie des graphes ayant de surcrot des ordres de complexite
polyn omiaux. Le second probl`eme etudie est la caracterisation graphique de lobservabil-
ite forte dune partie quelconque de letat et de lentree. Ce probl`eme est le plus general
concernant lobservabilite des syst`emes lineaires standards. Les conditions trouvees sont
moins intuitives et necessitent levaluation dune fonction dont largument est un ensemble
de sommets. Comme cela sera discute plus en details dans le chapitre 4, limplementation
de ces conditions est moins aisee et moins directe. La derni`ere question abordee dans ce
Chapitre 2. Observabilite generique de letat et de lentree des syst`emes lineaires structures 59
chapitre concerne lobservabilite forte de letat. Les conditions necessaires et susantes
obtenues sont aussi simples que celles de lobservabilite totale de lentree et de letat.
Les conditions dobservabilite enoncees dans ce chapitre ne garantissent pas lexistence
dun observateur de Luenberger ou plus generalement causal permettant lestimation des
variables non mesurees du syst`eme. Ce dernier probl`eme, resolu pour la reconstruction de
letat dans [Commault et al., 2001], aboutit evidemment ` a des conditions plus restrictives
que celles assurant (juste) son observabilite.
La notion de zeros invariants a ete tr`es utilisee pour etablir nos resultats. Nous nous
sommes inspires speciquement de resultats de [van der Woude, 2000] qui sappliquent
tr`es bien au probl`eme dobservabilite, une fois eectuee la decomposition introduite dans
la denition 2.2.
Dans le chapitre suivant, nous traitons du probl`eme de placement de capteurs addition-
nels dont lobjectif serait le recouvrement des conditions dobservabilite obtenues dans ce
chapitre.
60 2.4. Conclusion
3
Placement de capteurs pour le
recouvrement de lobservabilite forte
ou dune partie de letat et de
lentree
3.1 Introduction
Dans le chapitre precedent, nous avons etabli les conditions graphiques dobservabilite
forte generique de tout ou dune partie de letat dun syst`eme ` a entrees inconnues. Au cas
o` u ces conditions ne seraient pas veriees, la seule solution pour leur recouvrement est
de placer de nouveaux capteurs. Aussi, lobjectif de letude que nous avons menee est de
proposer des strategies optimisees de placement de capteurs reposant sur une approche
graphique et sur une analyse structurelle du syst`eme. Lapproche graphique permet, dune
part, davoir une vue plus claire des interactions entre les variables du syst`eme et, dautre
part, nous autorise `a disposer doutils et dalgorithmes optimises pour la resolution du
probl`eme considere.
Notre etude est largement inspiree de [Commault et al., 2005b] qui traitent du placement
61
62 3.2. Placement de capteurs pour le recouvrement de lobservabilite forte dune partie de letat dun syst`eme
de capteurs pour le recouvrement de lobservabilite de letat des syst`emes sans entree in-
connue et de [Commault et al., 2005a, Commault et al., 2006, Commault et Dion, 2007]
qui concernent le probl`eme de placement de capteurs pour la solubilite du probl`eme
de detection et de localisation de defauts. Aussi, nous utilisons les memes representa-
tions graphiques, les memes outils et les memes algorithmes classiques de la theorie des
graphes ` a savoir lalgorithme de calcul de ot maximal, de Ford-Fulkerson et de Dulmage-
Mendelsohn.
Ainsi, dans ce chapitre, nous nous proposons de traiter le probl`eme de placement de cap-
teurs an de garantir lobservabilite forte de tout ou dune partie de letat. Dabord, nous
traitons le probl`eme plus complexe qui consiste `a recouvrer lobservabilite de certaines
composantes donnees de letat. La methode que nous adoptons presentant certains points
faibles, nous tenterons par la suite de les supprimer en considerant le probl`eme de recou-
vrement de lobservabilite forte de tout letat du syst`eme. Les deux solutions proposees
sont illustrees, tout au long du chapitre, par des exemples academique assez simples.
3.2 Placement de capteurs pour le recouvrement de
lobservabilite forte dune partie de letat dun
syst`eme
Le premier probl`eme aborde dans ce chapitre concerne donc le recouvrement de la
propriete dobservabilite forte pour une partie donnee de letat dun syst`eme soumis `a des
entrees inconnues. Lobjectif que nous nous xons est de trouver des elements de reponse
` a la question combien et o` u faut-il placer des capteurs pour quun ensemble donne de
composantes de letat du syst`eme considere soit generiquement fortement observable ?.
Cette question peut se poser d`es la conception du syst`eme an dassurer lobservabilite
forte de certaines composantes detat essentielles dans le contexte dune supervision par
exemple. Les conditions que nous allons proposer pour le placement des capteurs addi-
tionnels se repartissent en deux groupes. Le premier regroupe des conditions necessaires
Chapitre 3. Placement de capteurs pour le recouvrement de lobservabilite forte ou dune partie de letat et de lentree63
et le second des conditions susantes. Le second contient des conditions susantes qui,
lorsquelle sont satisfaites, assurent que lensemble des composantes de letat devant etre
fortement observable le sont eectivement.
3.2.1 Position du Probl`eme
Soit X, lensemble des composantes de letat que nous desirons rendre fortement
observables. Lobjectif de cette section est de trouver le nombre et la localisation des
mesures supplementaires symbolisees par lequation z(t) = H
x
x(t) +H
u
u(t) de telle sorte
que pour le syst`eme structure
:
_
_
x(t) = A
x(t) + B
u(t)
y(t) = C
x(t) + D
u(t)
z(t) = H
x
x(t) + H
u
u(t)
(3.1)
toutes les composantes de soient fortement observables alors quelles ne le sont pas
pour le syst`eme
:
_
_
_
x(t) = A
x(t) + B
u(t)
y(t) = C
x(t) + D
u(t)
o` u x(t) R
n
represente le vecteur detat du syst`eme, u(t) R
q
le vecteur des entrees et
y(t) R
p
le vecteur des sorties. A, B, C et D sont des matrices de dimension appropriee.
En dautres termes, dapr`es la proposition 2.8, le syst`eme complete
c
doit verier
(Y Z ) = (Y Z)
Lobjectif etant de trouver le placement des nouveaux capteurs, partir dun graphe represen-
tant le syst`eme complete
c
ne nous parat pas pertinent car, nous ne saurions combien
il y a de sommets relatifs aux capteurs additionnels et ` a quels sommets les relier. Ainsi,
notre etude repose enti`erement sur le graphe oriente du syst`eme dorigine. Par ailleurs, la
decomposition denie dans le paragraphe 2.2.2 est aussi appliquee au syst`eme structure
dorigine
.
Tout comme letude [Commault et al., 2005b], notre strategie comportera, pour des raisons
64 3.2. Placement de capteurs pour le recouvrement de lobservabilite forte dune partie de letat dun syst`eme
de simplicite, deux etapes correspondant respectivement au recouvrement des deux con-
ditions bien speciques. Ainsi, on separe la condition de la proposition 2.8 en les deux
conditions suivantes :
Condition de connectivite ` a la sortie : tout sommet de est le debut dau moins un
chemin atteignant un sommet de Y.
En eet, supposons que la condition de connectivite ` a la sortie ne soit pas satisfaite, i.e.
x
i
` a partir duquel il nexiste pas de chemin Y -cime. Alors, k 0, la i
`eme
colonne
de C
(A
)
k
serait egale ` a zero. Ce qui impliquerait que la composante de letat x
i
nest
pas observable.
condition : v ,
_
Y v
_
= (Y).
Proceder en deux etapes permet dobtenir aussi bien des conditions necessaires que des
conditions susantes. Nous navons pas, pour linstant, trouve des conditions necessaires
et susantes permettant de mieux caracteriser les solutions de recouvrement de lobserv-
abilite forte de par rajout de capteurs.
3.2.2 Recouvrement de la condition de connectivite `a la sortie
Notons par
1
lensemble de tous les sommets de qui ne sont pas au debut dun
chemin Y-cime. Le but est alors de rajouter des mesures sur le syst`eme pour que tous
ces sommets soient connectes `a au moins un capteur. Ce probl`eme est similaire ` a celui
traite dans [Commault et al., 2005b]. Aussi, nous allons utiliser la meme strategie pour le
resoudre. Nous denissons les notations suivantes :
Deux sommets v
i
et v
j
sont dits fortement connectes sil existe un chemin de v
i
` a v
j
et
un autre de v
j
` a v
i
i.e. (v
i
, v
j
) = (v
j
, v
i
) = 1.
Nous supposerons quun sommet est fortement connecte ` a lui-meme.
La relation est fortement connecte `a, notee 1
SC
, est une relation dequivalence et nous
pouvons denir ces classes dequivalence. Chaque classe dequivalence est appelee com-
posante connexe du graphe oriente ((
). Notons que chaque sommet de sortie ainsi que
chaque sommet dentree est une composante connexe ` a lui seul.
Les composantes fortement connexes peuvent etre ordonnees en utilisant une relation dor-
Chapitre 3. Placement de capteurs pour le recouvrement de lobservabilite forte ou dune partie de letat et de lentree65
dre partielle notee et denie par :
Deux composantes connexes C
i
et C
j
sont telles que C
i
C
j
, sil existe au moins un arc
(v
j
, v
i
) o` u v
j
C
j
et v
i
C
i
ou en dautres termes (C
j
, C
i
) ,= 0.
Nous pouvons ordonner partiellement les composantes connexes contenant des elements
de
1
en utilisant cette relation . Notons alors par I
lensemble de tous les elements
x
i
1
tels que la composante fortement connexe incluant x
i
soit minimale dans
1
.
`
A
chaque element x
i
I
, nous associons un ensemble
x,i
deni par
x,i
= x
k
C
, C
X/1
SC
et C
C
x
i
, o` u X/1
SC
est lensemble quotient de X
par la relation 1
SC
.
Nous pouvons alors enoncer :
Proposition 3.1. Soit le syst`eme lineaire structure
represente par le graphe oriente
((
). An de recouvrer la condition de connectivite `a la sortie, il est necessaire et su-
isant que les capteurs additionnels mesurent au moins un etat associe `a un element de
chaque ensemble
x,i
, x
i
I
.
Preuve :
Susance : Dune part, par construction, tous les sommets de
1
sont connectes ` a tous
les elements dau moins un ensemble
x,i
, x
i
I
. Il est donc evident que si un capteur
mesure un etat associe ` a un sommet dans chacun de ces ensembles, alors la condition de
connectivite sera satisfaite.
Necessite : Sil existe un ensemble
x,i
, x
i
I
dans lequel aucune mesure na ete prise
alors aucun element de cet ensemble nest connecte ` a la sortie. Cela implique quil ny a
aucun chemin connectant le sommet x
i
vers la sortie car, par denition, tous les chemins
partant de x
i
passent necessairement par un element de
x,i
. Aussi, cela conduit au fait
que la condition de connectivite `a la sortie nest pas satisfaite pour le syst`eme complete
et, par voie de consequence, que tous les elements de
1
ne sont pas fortement ob-
servables.
La proposition 3.1 etablit des conditions necessaires et susantes au placement de cap-
teurs additionnels pour le recouvrement de la connectivite `a la sortie de tous les elements
66 3.2. Placement de capteurs pour le recouvrement de lobservabilite forte dune partie de letat dun syst`eme
de
1
. Cette condition etant necessaire ` a lobservabilite forte des composantes de letat
associees aux elements de
1
, la contrainte de la proposition 3.1 represente une condi-
tion susante `a la localisation des capteurs ` a rajouter sur le syst`eme. Neanmoins, cette
proposition nindique pas le nombre minimal de capteurs `a rajouter pour le recouvrement
de la connectivite `a la sortie de tous les elements de
1
. En theorie, ce nombre est egal `a
1. En eet, il est possible avec un seul capteur mesurant une combinaison lineaire de com-
posantes incluant au moins celle associee ` a un sommet de chaque ensemble
x,i
, x
i
I
de satisfaire ` a la condition de connectivite ` a la sortie. Cependant, cela risque de ne pas
toujours etre possible en pratique, en raison de la disparite des variables `a mesurer par ex-
emple. Nous pouvons tout de meme armer que rajouter plus de card(I
) capteurs serait
inecace ou redondant dans le cadre du recouvrement de la condition de connectivite ` a
la sortie de tous les elements de
1
.
Exemple 3.1. An dillustrer les propos precedents, considerons le syst`eme represente
dans lexemple de la gure 3.1 ci-dessous :
Fig. 3.1 Exemple pour le recouvrement de la condition de la connectivite ` a la sortie
Les composantes connexes du syst`eme sont u
1
, u
2
, x
1
, x
2
, x
3
, x
4
, x
5
et
x
6
, x
7
. De plus, nous avons les relations suivantes :
x
6
, x
7
_ x
3
, x
4
, x
5
_ x
1
_ u
1
et x
2
_ x
3
, x
4
, x
5
_ u
2
. Comme x
2
x
6
, x
7
et que x
6
, x
7
x
2
, il existe alors deux elements minimaux qui sont x
2
et
x
6
, x
7
. Si nous souhaitons rendre fortement observables x
1
, x
2
, x
3
et x
6
, les elements
Chapitre 3. Placement de capteurs pour le recouvrement de lobservabilite forte ou dune partie de letat et de lentree67
minimaux dans sont x
2
et x
6
. Nous avons alors I
= x
2
, x
6
. Les denitions des
ensembles
x,i
donnent
x,2
= x
2
et
x,6
= x
6
, x
7
. Par consequent, le rajout dun
capteur dont la mesure inclurait une combinaison lineaire de x
2
et x
6
ou de x
2
et x
7
ou
encore de x
2
, x
6
et x
7
permettrait de recouvrer la propriete de connectivite `a la sortie.
3.2.3 Recouvrement de la condition
En complement aux conditions necessaires enoncees dans le paragraphe precedent,
lobjectif ici est de proposer un placement de capteurs permettant le recouvrement de
la condition . Dans un souci de simplicite, nous abordons dabord le cas o` u seule une
composante de letat doit etre rendue fortement observable. Ensuite, nous generalisons ` a
tout lensemble .
A partir du lemme 2.7, lensemble
2
= v , (Y v) = (Y) represente
toutes les composantes de qui ne sont pas fortement observables. Pour chaque element
x
i
2
, nous pouvons denir lensemble
x,i
=
_
v X U,
_
Y v, x
i
_
=
_
Y
v
_
_
. Lensemble
x,i
represente lensemble des composantes de letat ou de lentree qui,
si elles etaient mesurees, rendraient la composante de letat x
i
fortement observable. Nous
pouvons alors enoncer le lemme :
Lemme 3.2. Soit le syst`eme lineaire structure
represente par le graphe oriente ((
).
Pour chaque composante de letat associee `a un element x
i
2
, an de recouvrer la
condition , il sut de rajouter un seul capteur dont la mesure serait une combinaison
lineaire delements associes `a lensemble 1
obs
et dun et un seul element de
x,i
.
Preuve : La preuve de ce lemme est immediate sachant que le nombre minimal de
capteurs pour le recouvrement de la condition est egal `a 1. Comme 1
obs
represente
lensemble des sommets associes aux composantes fortement observables, qui sexpriment
donc en fonction seulement des composantes de sortie y et de leurs derivees, rajouter
un capteur qui mesurerait une combinaison lineaire de composantes prises dans 1
obs
et
dune composante dans
x,i
est equivalent, dun point de vue observabilite, ` a rajouter un
capteur qui mesurerait uniquement une composante associee `a un element de
x,i
. Par
68 3.2. Placement de capteurs pour le recouvrement de lobservabilite forte dune partie de letat dun syst`eme
construction, cela assure lobservabilite forte de x
i
.
Revenons maintenant au cas o` u nous voulons rendre fortement observables tous les ele-
ments de
2
. Pour cela, nous utilisons la relation dordre partielle dinclusion an
dordonner les ensembles
x,i
, x
i
2
. Ainsi, nous pouvons denir
2
comme etant le
sous-ensemble de
2
tel que
2
def
= x
i
2
,
x,i
est un element minimal pour la relation
La proposition suivante donne les conditions susantes pour que le rajout de capteurs
representes par un ensemble de sommets Z dans le graphe ((
) assure lobservabilite
forte des composantes associees aux elements de
2
et donc `a ceux de :
Proposition 3.3. Soit le syst`eme lineaire structure
represente par le graphe oriente
((
). An de recouvrer la condition , et donc de recouvrer lobservabilite forte des
elements de avec des capteurs additionnels representes par lensemble de sommets Z,
il sut quil existe un ensemble de sommets V
X,U
_
_
x
i
x,i
_
tel que
_
_
x
i
2
, V
X,U
x,i
,=
_
(X U) 1
obs
, Z
_
= card(V
X,U
) +
_
(X U) (1
obs
V
X,U
), Z
_
(V
X,U
, Z) = card(V
X,U
)
(3.2)
Preuve : Le syst`eme dequations (3.2) assure que pour chaque x
i
2
, il existe un
element dans
x,i
qui sexprime comme une combinaison lineaire :
delements associes aux capteurs ajoutes ;
delements associes aux sommets inclus dans 1
obs
qui sexpriment en fonction des
sorties y et de leurs derivees.
Ainsi, cest comme si un element etait mesure dans chaque ensemble
x,i
, x
i
2
. Or,
comme par denition les ensembles
x,i
, x
i
2
sont minimaux par rapport ` a la relation
dinclusion, alors x
k
2
, il existe un element x
i
2
tel que
x,k
x,i
. Ainsi,
satisfaire au syst`eme dequations (3.2) revient ` a assurer pour tout x
k
2
, lexistence
dune composante associee `a un element de
x,k
qui est combinaison lineaire de z, de y et
Chapitre 3. Placement de capteurs pour le recouvrement de lobservabilite forte ou dune partie de letat et de lentree69
de ses derivees. Dapr`es le lemme 3.2, cela est susant ` a assurer lobservabilite de toutes
les composantes de letat constituant
2
.
Lexemple suivant permet dillustrer les calculs induits par lapplication de la strategie de
placement de capteurs proposee pour le recouvrement de la condition .
Exemple 3.2. Considerons le syst`eme associe au graphe oriente represente `a la gure 3.2
et supposons que lobservabilite forte des elements de = x
2
, x
3
, x
4
, x
5
, x
6
= X 1
obs
doit etre garantie. Notons que =
2
. Le calcul des ensembles
x,i
donne :
x,2
=
Fig. 3.2 Example 3.2
x
2
, x
3
, x
4
,
x,3
= x
3
, x
2
, x
4
,
x,4
= x
4
, x
3
, x
2
,
x,5
= x
5
et
x,6
= x
6
, x
5
.
Nous constatons que
x,5
x,6
,
x,2
x,3
x,4
et que
x,5
(
x,2
x,3
x,4
) = .
Nous pouvons verier que
= x
2
, x
3
, x
4
, x
5
. Dapr`es le lemme 3.2, pour garantir
lobservabilite forte de , il faut mesurer x
5
et x
2
ou x
3
ou x
4
. Choisissons par exemple
V
X,U
= x
2
, x
5
. Pour garantir lobservabilite forte de , selon la proposition 3.3, il
est necessaire que (V
X,U
, Z) = 2 et donc quil y ait au moins deux arcs v-disjoints de
V
X,U
aux sommets de capteurs rajoutes Z. Nous constatons que la condition se verie
car
_
(X U) 1
obs
, Z
_
= 2 et
_
(X U) (1
obs
V
X,U
), Z
_
= 0.
Notons que la proposition 3.3 ne donne pas de conditions necessaires et susantes
` a la conguration des nouveaux capteurs ` a placer. En eet, `a part la condition triviale
_
Y Z
_
=
_
Y Z
_
, nous ne proposons pas de conditions qui soient necessaires
et susantes. Par ailleurs, il se peut aussi quil existe des solutions avec des capteurs
mesurant des elements qui ne sont dans aucun ensemble
x,k
, x
k
2
, comme le montre
lexemple suivant :
70 3.2. Placement de capteurs pour le recouvrement de lobservabilite forte dune partie de letat dun syst`eme
Exemple 3.3. Considerons le syst`eme associe au graphe oriente represente `a la gure
3.3 et supposons que lobservabilite forte des elements associes `a = x
3
, x
4
souhaite
etre assuree. Des calculs assez simples permettent decrire
x,3
= x
3
et
x,4
= x
4
.
Il est alors aise de voir que toute solution de recouvrement de lobservabilite forte de x
3
et x
4
necessite au moins deux capteurs. Par ailleurs, il est assez aise de constater quune
solution serait de choisir z
1
= x
5
et z
2
= x
4
, meme si x
5
nest ni dans
x,3
ni dans
x,4
.
Fig. 3.3 Exemple 3.3
Dautre part, la proposition 3.3 ne donne aucune information sur le nombre minimal
de capteurs necessaire au recouvrement des composantes associees aux elements de .
En eet, nous pouvons juste dire quil existe une solution avec p
capteurs o` u p
=
min(card(V
X,U
)) sous la contrainte x
i
2
, V
X,U
x,i
,= . Une solution avec moins
de capteurs pourrait tr`es bien exister, comme le montre lexemple suivant :
Exemple 3.4. Considerons le syst`eme de lexemple 3.3 precedent represente par le graphe
oriente de la gure 3.3. Supposons que nous voulions recouvrer lobservabilite forte des
composantes associees `a = x
1
, x
2
, x
7
. Le calcul de
x,1
,
x,2
et
x,7
donne :
x,1
= x
1
, x
3
, x
6
,
x,2
= x
2
, x
5
, x
8
et
x,7
= x
4
, x
7
.
Ainsi,
x,1
x,2
=
x,1
x,7
=
x,7
x,2
= . Donc toute solution preconisee par la
proposition 3.3 necessiterait le rajout de trois capteurs.
Or, seulement deux capteurs sont necessaires. En eet, une solution consisterait `a rajouter
par exemple les capteurs z
1
= x
3
et z
2
= x
4
. Cette conguration ne contient aucune com-
posante associee `a lensemble
x,2
. Il existe de plus dautres solutions. Ainsi, la strategie
proposee par la proposition 3.3 aboutit certes `a un placement de capteurs assurant lobserv-
abilite forte des elements de mais avec un nombre de capteurs qui nest pas minimal.
Chapitre 3. Placement de capteurs pour le recouvrement de lobservabilite forte ou dune partie de letat et de lentree71
La strategie proposee pour le recouvrement de lobservabilite forte dune partie donnee
de letat reste donc encore une question ` a approfondir. Il peut etre attendu qu` a limage de
lanalyse de lobservabilite, le probl`eme de placement de capteurs pour le recouvrement de
lobservabilite forte de tout letat soit plus simple `a apprehender. Letude de ce probl`eme
fait lobjet du paragraphe suivant.
3.3 Placement de capteurs pour le recouvrement de
lobservabilite forte
Le second probl`eme aborde dans ce chapitre concerne le recouvrement de la propriete
dobservabilite forte de letat dun syst`eme soumis ` a des entrees inconnues telles que des
defauts, des perturbations ou encore des interactions avec des syst`emes exterieurs dans
le cas de syst`emes distribues. Lobservabilite de letat serait ainsi garantie independam-
ment de ces entrees, ce qui peut etre important dans le cadre de la synth`ese de schemas
dobservation tolerants aux defauts par exemple.
Evidemment, il est possible dutiliser
les resultats obtenus dans le paragraphe precedent. Cependant, la strategie de placement
de capteurs pouvant encore etre amelioree, lobjectif est de trouver des conditions plus
simples et eventuellement plus compl`etes. Les conditions recherchees pour le placement
de capteurs additionnels peuvent etre necessaires et/ou susantes. Elles peuvent aussi
conduire `a utiliser des tests pour evaluer lecacite de certaines congurations de cap-
teurs additionnels. Neanmoins, en aucun cas nous ne nous sommes interesses ` a etablir une
liste exhaustive de tous les placements qui rendraient le syst`eme fortement observable.
Ce probl`eme combinatoire ne presente pas un interet theorique majeur et sa resolution,
toujours possible, necessiterait, ` a notre avis, lutilisation dalgorithmes de complexite ex-
ponentielle.
Ci-dessous, nous posons precisement le probl`eme du placement de capteurs que nous
envisageons de resoudre. Ce probl`eme relativement complexe est decoupe en deux sous-
probl`emes plus simples dont la solution est proche de ce qui a ete realise notamment dans
72 3.3. Placement de capteurs pour le recouvrement de lobservabilite forte
[Commault et al., 2005b, Commault et Dion, 2007].
3.3.1 Position du probl`eme
Lobjectif de cette section est de trouver le nombre et la localisation de capteurs
supplementaires symbolises par lequation z(t) = H
x
x(t) + H
u
u(t) de telle sorte que le
syst`eme structure
:
_
_
x(t) = A
x(t) + B
u(t)
y(t) = C
x(t) + D
u(t)
z(t) = H
x
x(t) + H
u
u(t)
(3.3)
soit fortement observable alors que le syst`eme
:
_
_
_
x(t) = A
x(t) + B
u(t)
y(t) = C
x(t) + D
u(t)
ne lest pas. En dautres termes, le syst`eme complete
c
doit verier les deux conditions
du corollaire 2.10 :
Condition de distance : X
0
V
ess
(U
0
, Y
0
X
s
).
Condition de couplage :
_
U
1
X
s
X
1
, X
1
Y
1
_
= n
s
+ n
1
+
_
U
1
, X
1
Y
1
_
.
La decomposition de la denition 2.2 est relative au syst`eme ayant comme sortie le vecteur
(y
T
(t), z
T
(t))
T
.
Lobjectif etant de placer de nouveaux capteurs, comme pour le paragraphe precedent,
notre etude repose enti`erement sur le graphe oriente du syst`eme dorigine. Par ailleurs, la
decomposition denie dans le paragraphe 2.2.2 est aussi appliquee au syst`eme structure
dorigine
.
Aux deux conditions ci-dessus, nous rajoutons la condition de connectivite, bien que prise
en compte par la condition de distance. En eet la condition de distance etant complexe
` a traiter, nous repartissons ainsi la diculte du probl`eme initial en deux probl`emes plus
simples.
Une seule hypoth`ese non restrictive est faite sur le syst`eme, `a savoir que g-rang
_
_
B
_
_
=
Chapitre 3. Placement de capteurs pour le recouvrement de lobservabilite forte ou dune partie de letat et de lentree73
(U, X Y) = q. Si tel netait pas le cas, cela signierait que des colonnes de
_
_
B
_
_
ne sont pas lineairement independantes. Dans ce cas, les entrees seraient redondantes et
il surait deliminer les entrees inutiles et donc les colonnes liees.
Tout comme letude [Commault et al., 2005b], notre strategie comporte trois etapes cor-
respondant au recouvrement de la condition de connectivite ` a la sortie puis des deux
conditions du corollaire 2.10. Proceder ainsi permet de traiter trois probl`emes relative-
ment simples. Cependant, cela ne garantit pas que le nombre total de capteurs additionnels
proposes sera minimal mais cet aspect est aborde ` a la n de la section. Pour des raisons
exposes plus tard dans le texte, nous debutons par le recouvrement de la condition de
connectivite avant de traiter la condition de couplage et enn, daborder le recouvrement
de la condition de distance.
3.3.2 Recouvrement de la condition de connectivite `a la sortie
Nous nexposerons pas enti`erement la strategie de recouvrement de la condition de
connectivite ` a la sortie, sachant queelle est rigoureusement identique ` a celle exposee dans
le paragraphe 3.2.2. En reprenant les denitions de ce dernier paragraphe, nous denis-
sons les elements minimaux par rapport `a la relation comme etant des composantes
fortement connexes nayant aucun arc sortant vers une autre composante fortement con-
nexe. Cest naturellement le cas pour les sommets de sortie. On appelle composantes
minimales non connectees les composantes fortement connexes minimales qui ne sont pas
des sommets de sortie. Nous pouvons alors enoncer :
Proposition 3.4. Soit le syst`eme lineaire structure
represente par le graphe oriente
((
). An de satisfaire `a la condition de connectivite `a la sortie de toutes les composantes
de letat, il est necessaire et susant que les capteurs rajoutes mesurent au moins un
element dans chaque composante minimale non connectee.
74 3.3. Placement de capteurs pour le recouvrement de lobservabilite forte
3.3.3 Recouvrement de la condition de couplage
Le probl`eme de lajout de nouveaux capteurs pour le recouvrement de la condition
de couplage a ete traite dans [Commault et al., 2005b] en utilisant les graphes bipartis et
lalgorithme de decomposition de Dulmage-Mendelsohn. Lobjectif du placement de cap-
teurs etant dobtenir un couplage de taille n +q, le nombre minimal et donc necessaire et
susant de capteurs `a rajouter pour le recouvrement de la condition de couplage est egal
` a n +q (V
+
, V
). Il sagit maintenant de savoir les localiser. Pour cela, nous utilisons
une partie de lalgorithme de decomposition de Dulmage-Mendelsohn.
En premier lieu, nous associons `a chaque couplage M un graphe non biparti note B
M
(
) =
(V
+
, V
,
W) o` u (v
1
, v
2
)
W (v
1
, v
2
) W ou (v
2
, v
1
) M. En outre, nous notons
S
+
0
= V
+
+
M.
An de preciser la localisation des capteurs additionnels pour le recouvrement de la con-
dition de couplage, nous utilisons lalgorithme suivant similaire `a celui presente dans
[Commault et al., 2005b] :
Algorithme 3.1.
Trouver un couplage maximal M dans B(
),
Soient V
+
0
= S
+
0
v V
+
, il existe un chemin dans B
M
(
) de S
+
0
`a v et
V
0
= v V
, il existe un chemin dans B
M
(
) de S
+
0
`a v.
Apr`es avoir determine lensemble V
+
0
, nous pouvons enoncer :
Proposition 3.5. Soit le syst`eme lineaire structure
represente par le graphe biparti
B(
). An de recouvrer la condition de couplage, il faut et il sut de rajouter d =
n +q (V
+
, V
) capteurs qui doivent prendre n +q (V
+
, V
) mesures lineairement
independantes dans V
+
0
i.e. (V
+
0
, Z
) = d, o` u Z
represente les sommets associes aux
capteurs ajoutes.
Preuve : La preuve est identique `a celle donnee dans [Commault et al., 2005b], nous
nen presenterons quun aper cu.
En premier lieu, notons que la decomposition de Dulmage-Mendelsohn caracterise tous
Chapitre 3. Placement de capteurs pour le recouvrement de lobservabilite forte ou dune partie de letat et de lentree75
les couplages maximaux. Il sensuit que si lon rajoute `a un couplage maximal M de
B(
) un nombre darcs egal ` a card(V
+
0
)card(V
0
) entre S
+
0
et les capteurs additionnels
pour former un couplage de taille card(V
+
0
) card(V
0
), alors nous obtenons un couplage
maximal de taille n + q dans B(
c
) ce qui permettrait de satisfaire `a la condition de
couplage. Dautre part, considerons une quelconque solution qui donnerait un couplage
maximal M
c
de taille n + q dans B(
c
). M
c
est incident ` a tous les sommets de V
+
0
et
donc il existe au moins card(V
+
0
) card(V
0
) arcs entre V
+
0
et les capteurs additionnels.
Lexemple suivant illustre la decomposition de Dulmage-Mendelsohn et la strategie de
placement de capteurs adoptee ainsi que le type de conclusions auxquelles conduit notre
precedente analyse.
Exemple 3.5. Considerons le syst`eme lineaire structure avec pour graphe associe celui
de la gure 3.4. Les ensembles donnes par la denition 2.2 qui nous interessent sont X
1
=
x
1
, x
2
, x
3
, x
4
,U
0
= u
2
, u
3
, U
1
= u
1
. Y
0
= et Y
1
= Y. X
0
= x
5
, x
6
, x
7
, x
8
, x
9
, x
10
.
Notons que le syst`eme nest pas compl`etement connecte. Dailleurs, les composantes qui
Fig. 3.4 Exemple 3.5
nappartiennent pas `a un chemin Y-cime sont representees par
1
= X
0
. Commen cons
par reconnatre les composantes connexes dans
1
. Le composantes fortement connexes
76 3.3. Placement de capteurs pour le recouvrement de lobservabilite forte
sont C
1
= u
2
, C
2
= u
3
, C
3
= x
8
, x
9
, C
4
= x
10
et C
5
= x
5
, x
6
, x
7
. Nous
remarquons quil nexiste pas de chemin entre les composantes connexes C
4
et C
5
alors
quil est possible daller de C
1
et C
2
`a C
3
et de cette derni`ere `a C
5
. Avec ces relations
nous pouvons ordonner les composantes par rapport `a lordre partielle. Nous obtenons
C
5
C
3
C
1
et C
4
C
2
. Les elements minimaux sont alors C
4
= x
10
et
C
5
= x
5
, x
6
, x
7
. Dans ces ensembles, les elements tels que la composante fortement
connexe est minimale en
1
sont I
= x
5
, x
6
, x
7
, x
10
. Ainsi, nous pouvons calculer les
ensembles
x,6
= x
5
, x
6
, x
7
et
x,10
= x
10
. En consequence, le rajout dun capteur
dont la mesure inclurait une combinaison lineaire de x
6
et x
10
ou de x
7
et x
10
, ou encore
de x
5
, x
6
, x
7
et x
10
permettrait de recouvrer la propriete de connectivite `a la sortie. Il faut
noter que toutes ces combinaisons lineaires permettent de recouvrer la connectivite `a la
sortie, mais en aucun cas rendent forcement observable le syst`eme. En utilisant lune de
ces combinaisons lineaires, nous garantissons seulement que chaque sommet de
1
est le
sommet de depart dau moins un chemin Y-cime.
Pour retablir la condition de couplage, nous utilisons le graphe biparti auxiliaire de la gure
3.5. Un couplage maximal M, montre en tiret sur la gure, est compose des arcs (u
+
1
, x
3
),
(x
+
3
, y
2
), (x
+
2
, x
1
) et (x
+
1
, y
1
). Du graphe B
M
(
) associe au couplage maximal M, nous
Fig. 3.5 Graphe biparti de lexemple 3.5
obtenons que S
+
0
= x
+
4
, V
+
0
= x
+
3
, x
+
4
et V
0
= y
2
. De plus, (V
+
, V
) = 4 et donc
d = 1. Il est facile de conclure quune mesure doit etre placee sur la composante de letat
representee par le sommet x
+
4
.
Chapitre 3. Placement de capteurs pour le recouvrement de lobservabilite forte ou dune partie de letat et de lentree77
3.3.4 Recouvrement de la condition de distance
Supposons que les conditions de connectivite `a la sortie et de couplage soient satisfaites.
Dans ce cas, la taille du lien maximal U-Y est egale ` a card(U) soit q. Il est alors important
de remarquer quun capteur quelconque rajoute sur le syst`eme
ne peut en aucun cas
agrandir lensemble V
ess
(U, Y) et donc V
ess
(U
0
, Y
0
) car V
ess
(U, Y) = V
ess
(U
0
, Y
0
) U
1
,
dapr`es le lemme 2.3. En eet, le nombre de chemins disjoints entre U et Y etant dej`a
maximal, il ne peut etre augmente. Un sommet qui netait pas essentiel pour les liens max-
imaux U-Y ne peut donc pas le devenir en rajoutant dautres capteurs et donc dautres
possibilites de chemins. Ainsi, si un element x
i
X
0
est tel que x
i
X
0
(X
0
V
ess
(U, Y))
alors en rajoutant un ou plusieurs capteurs z nimporte o` u sur le syst`eme, nous ne pour-
rons avoir x
i
V
ess
(U, YZ). Par consequent, lunique possibilite pour le recouvrement
de la condition de distance est de reduire lensemble X
0
ou plus precisement lui enlever
tous les elements x
i
tels que x
i
/ V
ess
(U
0
, Y
0
X
s
).
Lobjectif est alors de rajouter des capteurs z pour qu` a chaque element x
i
X
def
=
X
0
(X
0
V
ess
(U, Y)), nous ayons (U x
i
, Y Z) > (U, Y Z). Ce placement
est alors necessaire et susant pour le recouvrement de la condition de distance sachant
que nous avons assure par un placement de capteurs anterieur que (U x
i
, Y) =
(U, Y) = card(U). Pour cela, les capteurs doivent etre obligatoirement places pour
prendre des mesures sur X
0
U
0
, ce que nous justierons plus tard par le calcul. Notons
enn, que placer un capteur ainsi peut transformer un element de X
0
en un element de
X
1
et plus particuli`erement un element de V
ess
(U
0
, Y
0
) en un element de X
1
ou de X
s
.
Un element de V
ess
(U
0
, Y
0
) ne peut donc etre mesure et rester dans X
0
.
Il sagit, apr`es cette discussion, de placer les capteurs z qui reduiraient X
0
` a V
ess
(U
0
, Y
0
)
X. Considerons un sommet x
i
X
, si celui-ci est un sommet dentree sans arc ren-
trant, alors une condition necessaire et susante qui garantit (U x
i
, Y Z) >
(U, Y Z) est davoir z qui prenne une mesure dans lensemble des composantes asso-
ciees aux sommets se trouvant sur un chemin Ux
i
-S
i
(Ux
i
, Y) direct de longueur
non nulle. Cela peut etre deduit des travaux eectues dans le cadre du placement de cap-
78 3.3. Placement de capteurs pour le recouvrement de lobservabilite forte
teurs pour la resolution du probl`eme de generation de residus [Commault et Dion, 2007]
o` u les auteurs ont montre quun capteur prenant ses mesures apr`es S
i
(U x
i
, Y) est
compl`etement inutile alors que sil en prend au moins une seule (dans notre cas) sur un
chemin U x
i
-S
i
(U x
i
, Y) direct alors il resoudrait le probl`eme.
Neanmoins, contrairement aux sommets dentree, il peut y avoir des arcs rentrant sur
x
i
` a partir de sommets qui ne sont pas sur des chemins U x
i
-S
i
(U x
i
, Y) di-
rects, ou tout simplement nallant pas vers des sommets de sortie. Toutes les mesures
qui peuvent etre eectuees sur de tels sommets, qui sont inclus dans C
i
X
, o` u C
i
est la composante fortement connexe `a laquelle appartient x
i
, peuvent aussi satisfaire ` a
(U x
i
, Y Z) > (U, Y Z).
Aussi, ` a chaque sommet x
i
X
, nous associons un ensemble de sommets note
i
deni
par :
i
=
_
v
j
X
0
U
0
, v
j
est couvert par un chemin Ux
i
_
S
i
(Ux
i
, Y)U
_
direct
_
_
C
i
X
_
.
Sur ces ensembles de sommets, nous appliquons la relation dordre partielle dinclusion
ce qui nous permet dobtenir la condition necessaire et susante suivante pour le
recouvrement de la condition de distance par ajout de capteurs :
Proposition 3.6. Soit le syst`eme lineaire structure
represente par le graphe oriente
((
). Supposons que les conditions de connectivite `a la sortie et de couplage soient
satisfaites. An de recouvrer la condition de distance, il est necessaire et susant que les
capteurs ajoutes mesurent au moins une composante associee `a un element dans chaque
ensemble
i
, associe `a chaque x
i
X
et constituant un element minimal par rapport `a la
relation .
Preuve : La preuve de la proposition est immediate, sachant que pour tout sommet
x
i
X
seulement un capteur est necessaire et susant sil mesure une combinaison
lineaire de composantes incluant au moins un element associe ` a un sommet de
i
. Ainsi,
pour le recouvrement de la condition de distance, les capteurs ajoutes doivent prendre
au moins une mesure dans chaque ensemble
i
, x
i
X
. Lutilisation de la relation dor-
Chapitre 3. Placement de capteurs pour le recouvrement de lobservabilite forte ou dune partie de letat et de lentree79
dre partielle dinclusion permet de dire que cette condition est equivalente `a celle qui
imposerait de mesurer un element au moins de chaque ensemble
i
constituant des ensem-
bles minimaux par rapport ` a la relation .
La proposition 3.6 precise la localisation des capteurs additionnels mais non leur nombre.
En fait, l` a aussi, un seul capteur est susant theoriquement pour le recouvrement de la
condition de distance sil mesure une combinaison lineaire de composantes avec au moins
une prise dans chaque ensemble
i
constituant des ensembles minimaux par rapport ` a la
relation .
Fig. 3.6 Exemple 3.6
Exemple 3.6. Considerons le syst`eme lineaire represente par le graphe oriente de la
gure 3.6. Les ensembles donnes selon la denition 2.2 sont
0
= X = X
0
, X
1
= ,
U
0
= U, U
1
= , Y
0
= Y et Y
1
= .
Nous constatons que lensemble de sommets essentiels est V
ess
(U, Y) = u
1
, u
2
, x
1
, x
2
,
x
6
, y
1
, y
2
. Il est alors aise de voir par le corollaire 2.5 que lensemble des sommets
non observables est X
= x
3
, x
4
, x
5
, x
7
, x
8
. Calculons maintenant les ensembles
i
.
Prenons, par exemple, le sommet x
3
. Le separateur dentree avec x
3
comme sommet den-
tree est donne par S
i
(Ux
3
, Y) = x
1
, x
2
. Nous pouvons noter que des chemins U
x
3
- S
i
(U x
3
, Y) directs peuvent couvrir les sommets
3
= x
3
, u
1
, x
4
, u
2
, x
6
, x
5
.
En faisant la meme demarche pour les autres sommets de X
, nous obtenons
4
=
x
4
, x
3
, u
2
, x
6
, x
5
,
5
= x
5
, u
2
, x
6
, x
3
, u
1
, x
4
. Notons maintenant que S
i
(Ux
7
, Y) =
u
1
, x
6
, alors les chemins U x
7
- S
i
(U x
7
, Y) non nuls directs couvrent
7
=
80 3.4. Conclusion
u
2
, x
7
. Pour le sommet x
8
,
8
= u
2
, x
7
, x
8
. En appliquant les relations dinclusion
nous trouvons quil existe deux ensembles maximaux x
3
, x
4
, x
5
, x
6
, u
1
, u
2
et u
2
, x
7
.
Nous pouvons recouvrer la condition de distance et, pour cet exemple, lobservabilite forte
si nous mesurons une composante dans chaque sous-ensemble maximal, par exemple, x
7
et x
5
ou x
7
et x
3
. Cependant, la quantite de mesures nest pas precisee par la proposition
3.6. En rajoutant une seule mesure dune combinaison lineaire de x
7
et x
5
, par exemple
z = x
7
+ x
5
, et le syst`eme devient fortement observable.
3.4 Conclusion
Dans ce chapitre, nous avons aborde le probl`eme du placement de capteurs pour le re-
couvrement de la propriete dobservabilite forte dune partie donnee ou de tout letat dun
syst`eme ` a entrees inconnues. Cette etude sinspire des resultats recents [Commault et al., 2005b,
Commault et al., 2006, Commault et Dion, 2007] obtenus sur le placement de capteurs
pour lobservabilite simple ou pour la detection et la localisation de defauts. Elle a pour
objectif de proposer des strategies de placement de capteurs sous forme de conditions
necessaires et/ou susantes basees sur une representation graphique du syst`eme. Plus
precisement, pour le probl`eme de recouvrement de lobservabilite forte dune partie de le-
tat, nous avons etabli des conditions necessaires reposant sur la notion de recouvrement
de la condition de connectivite ` a la sortie. Ensuite, nous avons enonce des conditions
graphiques susantes sous la forme dun syst`eme dequations. La strategie proposee se
fonde sur lutilisation multiple de la fonction (cf. denition 2.4) dont limplementation
algorithmique nest pas aisee. Par ailleurs, cette strategie presente dierentes faiblesses
parmi lesquelles une non exhaustivite due ` a des conditions qui ne sont que susantes et
au fait quelle ne permet pas de savoir quel est le nombre minimal de capteurs additionnels
necessaires.
Le second probl`eme aborde est celui du placement de capteurs pour le recouvrement
de lobservabilite forte de tout letat du syst`eme. Le probl`eme a ete decompose en trois
etapes. La resolution de chaque etape repose sur des solutions ou des algorithmes connus
Chapitre 3. Placement de capteurs pour le recouvrement de lobservabilite forte ou dune partie de letat et de lentree81
tels que la decomposition de Dulmage-Mendelsohn pour la seconde etape ou lalgorithme
de relaxation de Ford-Fulkerson utile ` a la determination de separateurs pour la derni`ere
etape. Dune part, les conditions obtenues pour la localisation de capteurs sont necessaires
et susantes et lon arrive ainsi ` a caracteriser, si cela sav`ere necessaire, toutes les localisa-
tions de capteurs additionnels resolvant le probl`eme considere. Dautre part, dun point de
vue algorithmique, la strategie proposee est plus aboutie et conduit `a une implementation
dordre de complexite polynomial. Par ailleurs, le nombre minimal de capteurs quil est
necessaire et susant de rajouter est celui qui permet le recouvrement de la propriete de
couplage si celle-ci nest evidemment pas veriee. En eet, il est possible de resoudre les
deux probl`emes de recouvrement des conditions de connectivite ` a la sortie et de distance
avec un capteur dej`a necessaire `a la resolution du probl`eme de couplage si on lui impose
de prendre en plus des mesures dans certains ensembles.
Avec cette etude menee sur le probl`eme de placement de capteurs, il est possible de
generer une liste de toutes les congurations de capteurs permettant de recouvrer lob-
servabilite forte de letat. Malheureusement, ce probl`eme ne pourrait etre resolu que par
un algorithme dordre de complexite exponentiel. De plus, lutilite de cette liste reste `a
prouver. En revanche, en utilisant la fonction associee ` a une fonction co ut de placement
de capteurs, il serait aise de generer un outil comparatif des dierentes congurations
possibles de capteurs, utile ` a la conception meme du syst`eme. La fonction etant une
image de la dimension de lespace dobservabilite etendu (cf. lemme 2.7), elle pourrait
reeter lecacite dune conguration de capteurs.
82 3.4. Conclusion
4
Bote `a outils danalyse structurelle
LISA et divers aspects
algorithmiques
4.1 Introduction
Lambition premi`ere de la bote `a outils danalyse structurelle lisa est de proposer `a la
communaute scientique interessee un logiciel developpe sur plateforme libre, regroupant
les principaux resultats danalyse structurelle connus pour les syst`emes lineaires. La sec-
onde ambitions de cette bote `a outils est de mettre en oeuvre les resultats theoriques que
notre equipe developpe pour les syst`emes bilineaires avec comme contrainte de nutiliser
que des algorithmes ayant un ordre de complexite non exponentiel. Cette derni`ere exigence
garantit lapplicabilite de notre approche aux syst`emes de grande dimension. Ainsi, nous
privilegions lutilisation dalgorithmes classiques de la theorie des graphes en les adaptant
` a notre cadre dutilisation.
lisa a ete cree en collaboration avec M. Theodore Mader qui a eectue au cran un
stage de 12 semaines, entre avril et juin 2006, dans le cadre de sa 2
`eme
annee au Swiss
Federal Institute of Technology Zurich (eth). Lexistence de lisa doit beaucoup ` a ses
83
84 4.2. Description generale de lisa
connaissances tr`es precieuses en informatique et en algorithmique.
Une autre bote ` a outils danalyse structurelle satool a aussi vu le jour recemment dans la
communaute [Blanke et Lorentzen, 2006]. Cette derni`ere est essentiellement basee sur des
graphes bipartis et est dediee particuli`erement aux proprietes de diagnostic. Comparative-
ment, lisa a pour nalite de regrouper une plus grande partie de proprietes structurelles `a
analyser, telles la diagnosticabilite mais aussi lobservabilite, la commandabilite... Dautre
part, les syst`emes sont representes dans lisa principalement par des graphes orientes bien
que des procedures sappuient parfois sur des graphes bipartis. Enn, lisa, contrairement
` a satool, na pas ete con cue pour etre une bote `a outils de matlab
. En eet, lisa
est un logiciel independant pouvant avoir des interactions avec dautres logiciels, pour
linstant de calcul formel.
Dans ce chapitre, nous commencons par un descriptif general des diverses fonctionnal-
ites de lisa. Nous detaillons ensuite les algorithmes de base dej`a implementes tels que
le calcul de la taille maximale dun lien, les chemins disjoints, . Le paragraphe suivant
montre comment ces elements de base ont ete associes pour la construction doutils dedies
` a lanalyse de lobservabilite et de la diagnosticabilite. Enn, avant de presenter une br`eve
conclusion, nous discutons des dierents resultats danalyse structurelle qui seraient assez
aisement implementables et de lordre de complexite des algorithmes auxquels il faudrait
avoir recours.
4.2 Description generale de lisa
lisa est une bote `a outils danalyse structurelle graphique dediee aux syst`emes lineaires
et bilineaires structures. Il est important de noter que lisa nest pas un produit acheve et
est toujours en cours delaboration. Nos travaux de th`ese etant exclusivement consacres
aux syst`emes lineaires, nous ne presentons en detail dans ce manuscrit que les fonctionnal-
ites liees aux syst`emes lineaires. Pour la partie concernant les syst`emes bilineaires, quelques
explications sont donnees dans [Martinez-Martinez et al., 2007] sachant que cette partie
est plus en lien avec les travaux de th`ese de M. Sebastien Canitrot.
Chapitre 4. Bote `a outils danalyse structurelle LISA et divers aspects algorithmiques 85
Etant donne que lisa a comme objectif detre applique ` a des syst`emes de grande dimen-
sion et que, dans ce cas, la majorite des probl`emes ` a resoudre peuvent etre assez co uteux
en temps et en complexite de calcul (trouver des chemins disjoints dans un graphe oriente
par exemple...), il nous a semble crucial dutiliser un langage de programmation avec un
co ut faible dexecution (overhead), convivial et assez proche du niveau du code machine.
Le langage C/C++ nous a paru assez adapte, il est tr`es exible dans la creation dobjets
ou de classes avec un sacrice moindre de temps de calcul propre et de performances en
general. Concernant linterface graphique utilisateur, la biblioth`eque libre QT 4.0 a ete
choisie car elle est exible, tr`es portable et assez simple dutilisation pour la creation din-
terfaces graphiques. La simplicite de programmation et levolutivite ont ete pour nous des
crit`eres cruciaux dans le choix de nos outils de programmation. Le fait en plus dadopter
des plateformes libres de droits, nous permet denvisager un partage et une diusion plus
simples aupr`es de la communaute scientique. Par ailleurs, lisa a ete concue pour sexe-
cuter aussi bien sur les syst`emes dexploitation Microsoft Windows
98, XP et NT que
sur linux. Enn, une attention particuli`ere a ete portee `a la documentation. Toutes les
classes, les methodes et les objets utilises sont documentes. La gestion de la documenta-
tion est eectuee avec loutil doxygen qui est un generateur de documentations pour code
source. Cette documentation se presente sous la forme de pages html regroupees dans un
repertoire dedie.
lisa est subdivise en deux parties :
linterface graphique utilisateur,
les diverses procedures de calcul et les classes dobjet utilisees : Graph, StateRe-
corder, MatrixExporter,...
La classe principale sur laquelle resident la majorite de nos algorithmes est la classe Graph.
Elle contient le graphe oriente deni par lutilisateur et fournit des fonctions permettant
` a ce dernier de proceder ` a dierents calculs detailles dans les sections suivantes.
-Utilisation rapide de lisa
Linterface utilisateur est presentee `a la gure 4.1. Lutilisateur doit tout dabord choisir
86 4.2. Description generale de lisa
Fig. 4.1 Interface graphique utilisateur
le type de syst`emes avec lequel il souhaite travailler : lineaire ou bilineaire (gure 4.2).
Fig. 4.2 Selection du type de syst`eme
Ensuite, il est possible de creer simplement le graphe en posant des sommets et en
choisissant leur type comme le montre la gure 4.3, 4 types de sommets existent : les
entrees (connues), les perturbations (inconnues et representant des defauts ou toute autre
entree inconnue), les sommets etat et les sommets sortie.
Les arcs peuvent ensuite etre places entre les dierents sommets avec la souris.
Evidem-
ment, des securites ont ete programmees pour eviter les arcs sortant de sommets de sortie
ou rentrant sur des sommets dentree.
Dans la fenetre principale, plusieurs outils sont disponibles pour permettre `a lutilisateur
de copier, eacer ou transformer des sommets existants ce qui rend la manipulation des
graphes assez conviviale. Par ailleurs, les graphes peuvent etre sauvegardes pour etre reu-
Chapitre 4. Bote `a outils danalyse structurelle LISA et divers aspects algorithmiques 87
Fig. 4.3 Choix des types de sommets
tilises, imprimes sous dierents formats (eps, ps, png ). Enn, les matrices structurees
associees au graphe trace peuvent etre exportees, via loutil MatrixExporter, pour etre ex-
ploitees sur les logiciels de calcul formel maple et mupad. En eet, vu que nous travaillons
avec des syst`emes structures, caracterises par des param`etres sans valeur numerique, il
nous a semble plus pertinent de travailler avec des logiciels de calcul formel.
Apr`es ce bref apercu de lisa, nous abordons ci-dessous les dierents programmes qui ont
ete implementes ` a ce jour et les dierentes proprietes quils permettent detudier.
4.3 Algorithmes de base de LISA
An de faire lanalyse des proprietes structurelles de syst`emes lineaires et bilineaires,
lisa utilise des algorithmes de base. Ces briques elementaires ont ete concues pour
etre portables et implementables dans dautres contextes dans un souci devolutivite.
Ci-dessous, nous exposons les principales routines relatives aux syst`emes lineaires. Nous
explicitons sommairement les ordres de complexite des algorithmes utilises sans en donner
les details techniques qui seraient rebarbatifs dune part et pour lesquels nous ne sommes
pas tr`es specialistes dautre part. En eet, dans la mesure du possible, nous avons retran-
scrit ` a notre contexte des algorithmes existants issus de la theorie classique des graphes.
88 4.3. Algorithmes de base de LISA
`
A la gure 4.4 nous presentons linterface du logiciel lisa et les dierents icones associes
aux routines expliquees ci-dessous.
Fig. 4.4 Ic ones servant au calcul des proprietes de base
Calcul des sommets successeurs
Cet outil permet de calculer et de mettre en evidence les sommets successeurs dun en-
semble de sommets donne V
1
. Ce dernier est dabord selectionne avec loutil de prese-
lection de sommets accessible par lic one (selA). Lensemble des sommets v tels
que (V
1
, v) ,= 0 est alors determine et mis en evidence par une coloration en bleu du
pourtour de chaque sommet concerne. Lalgorithme utilise pour faire le calcul est issu
de la biblioth`eque Boost Library (http ://www.boost.org). Lordre de complexite de cet
algorithme est en O(M), o` u M represente ici le nombre darcs total du graphe.
Exemple 4.1. La gure 4.5 montre comment le logiciel met en evidence (en rouge sur le
logiciel et entoure par une ligne pointillee dans ce memoire) les sommets successeurs du
sommet choisi w
2
.
Chapitre 4. Bote `a outils danalyse structurelle LISA et divers aspects algorithmiques 89
Fig. 4.5 Calcul de successeurs
Calcul des sommets predecesseurs
Cet algorithme permet de calculer et de mettre en evidence les sommets predecesseurs
dun ensemble de sommets donne et selectionne par licone de selection (selA).
Lalgorithme utilise provient l` a aussi de la biblioth`eque Boost Library. Son ordre de com-
plexite est aussi en O(M).
Exemple 4.2. La gure 4.6 montre comment le logiciel met en evidence (en rouge sur
le logiciel et entoure par une ligne pointillee dans ce memoire) les sommets predecesseurs
du sommet choisi y
2
.
Nombre maximal de chemins disjoints entre deux ensembles de sommets
Apr`es selection de deux ensembles de sommets V
1
et V
2
respectivement gr ace aux ic ones
de selection (selA) et (selB), cet algorithme retourne la taille du lien maximal
entre V
1
et V
2
. Pour cela, une representation interne equivalente ` a celle du graphe oriente
90 4.3. Algorithmes de base de LISA
Fig. 4.6 Calcul de predecesseurs
deni par lutilisateur est utilisee. En eet, le calcul du nombre maximal de chemins
disjoints revient ` a un calcul de ot maximal dans un graphe oriente particulier. Ainsi, il
est associe au syst`eme un nouveau graphe note (
a
(
) sur lequel est applique lalgorithme
de calcul de ot maximal. (
a
(
) est construit en eclatant chaque sommet v de ((
)
en deux sommets v
et v
lies par un arc (v
, v
) de capacite unitaire. Chaque arc (v
1
, v
2
)
de ((
), sauf evidemment les arcs partant de V
2
et ceux arrivant `a V
1
, est transforme
en un arc (v
1
, v
2
) de capacite innie dans (
a
(
). De plus, on rajoute un sommet source
s
+
duquel un arc de capacite innie part vers chaque sommet entree v
i
si v
i
V
1
. On
rajoute aussi un sommet puits s
sur lequel arrivent des arcs de capacite innie partant
de chaque sommet v
i
si v
i
V
2
.
La taille dun lien V
1
-V
2
maximal dans ((
) est egale `a la valeur du ot maximal
dans (
a
(
) [Ford et Fulkerson, 1962, Murota, 1987]. Lalgorithme utilise est une partie
de lalgorithme de Ford-Fulkerson classique [Bang-Jensen et Gutin, 2006]. Le nombre de
recherches de chemins est dordre de complexite O(N), o` u N est le nombre de sommets
du graphe. Lordre de complexite total de chaque recherche de chemin est en O(N
M).
Chapitre 4. Bote `a outils danalyse structurelle LISA et divers aspects algorithmiques 91
Ainsi, lalgorithme de calcul du nombre maximal de chemins disjoints entre V
1
et V
2
a
un ordre de complexite total de O(N
2
M).
Fig. 4.7 Calcul de chemins disjoints
Exemple 4.3.
`
A la gure 4.7, le resultat obtenu pour le nombre maximal de chemins
disjoints entre les ensembles w
1
, w
2
et y
1
, y
2
est montre. Il se trouve quil y a seule-
ment un chemin disjoint montre en rouge sur le logiciel et en trait tirets dans ce document.
`
A la gure 4.8, le graphe auxiliaire pour le calcul des chemins disjoints est genere suiv-
ant la procedure presentee ci-dessus. Le ot et la capacite sont indiques par la relation
ot/capacite `a cote de chaque arc concerne. Sur ce graphe, le resultat est plus clair. No-
tons que le ot maximal dans le graphe auxiliaire est restreint `a 1, puisque larc (x
1
, x
1
)
a une capacite maximale de 1.
Calcul de lensemble de sommets essentiels V
ess
(V
1
, V
2
)
Apr`es selection de deux ensembles de sommets V
1
et V
2
respectivement gr ace aux ic ones
de selection (selA) et (selB), cet algorithme calcule et met en evidence lensem-
ble des sommets communs ` a tous les liens de taille maximale entre V
1
et V
2
. Le calcul
92 4.3. Algorithmes de base de LISA
Fig. 4.8 Graphe auxiliaire pour le calcul de chemins disjoints de la gure 4.6
seectue en faisant le constat simple que le nombre maximal de chemins entre V
1
et
V
2
diminue si nous ea cons tous les arcs arrivant et partant dun sommet essentiel. En
revanche, ce nombre ne varie pas si nous eacons les arcs arrivant et partant dun sommet
non essentiel. Ainsi, la determination de lensemble des sommets essentiels consiste en N
calculs et comparaisons de tailles de liens maximaux. Lordre de complexite pour ce calcul
est N fois lordre de complexite de lalgorithme utilise pour le calcul du nombre maximal
de chemins disjoints, cest ` a dire O(N
3
M).
Exemple 4.4.
`
A la gure 4.9, il est montre le resultat donne par lalgorithme determinant
les sommets essentiels. Dabord, les sommets de depart w
1
, w
2
, w
3
et w
4
sont selectionnes
avec (selA). Ensuite, les sommets darrivee y
1
, y
2
, y
3
et y
4
sont selectionnes avec
(selB). Finalement, les sommets essentiels sont aches en rouge sur le logiciel. La
gure 4.9 montre les sommets essentiels entoures par une ligne pointillee.
Calcul de separateurs dentree et de sortie
Apr`es selection de deux ensembles de sommets V
1
et V
2
respectivement gr ace aux ic ones
de selection (selA) et (selB). Cet algorithme calcule et met en evidence les
separateurs dentree et de sortie.
Le calcul se fait de la mani`ere suivante : dabord, nous calculons le nombre maximal de
sommets disjoints entre V
1
et V
2
. Ensuite, nous calculons lensemble des sommets es-
sentiels V
ess
(V
1
, V
2
). Pour trouver le separateur dentree, il est susant de prendre les
Chapitre 4. Bote `a outils danalyse structurelle LISA et divers aspects algorithmiques 93
Fig. 4.9 Calcul de sommets essentiels
sommets essentiels les plus proches de la source dans le graphe auxiliaire. Le separateur de
sortie est construit par symetrie en considerant les sommets essentiels les plus proches du
sommet puits. Comme nous lavons detaille precedemment, la determination de lensem-
ble de sommets essentiels necessite un algorithme dordre de complexite O(N
3
M). La
determination des sommets les plus proches de la source et du puits, qui se fait en serie
avec lalgorithme precedent, necessite un ordre de complexite en O(N log
2
(N)). Ainsi,
lordre de complexite total de lalgorithme permettant le calcul des separateurs dentree
et de sortie est de O(N
3
M).
Exemple 4.5.
`
A la gure 4.10, les separateurs dentree et de sortie sont montres. La
meme demarche que pour les sommets essentiels est appliquee. Les sommets appartenant
aux separateurs dentree et de sortie sont montres en rouge sur le logiciel. La gure 4.10
montre les sommets des separateurs entoures par une ligne pointillee. Deux separateurs
peuvent etre distingues. Le separateur dentree, compose par les sommets x
3
, w
2
et w
3
,
et le separateur de sortie, compose par les sommets x
1
, x
2
et y
4
.
94 4.3. Algorithmes de base de LISA
Fig. 4.10 Calcul de separateurs dentree et de sortie
Calcul de la taille du couplage maximal entre deux ensembles de som-
mets
Apr`es selection de deux ensembles de sommets V
1
et V
2
respectivement gr ace aux ic ones
de selection (selA) et (selB), cet algorithme calcule (V
1
, V
2
) i.e. le nombre
maximal darcs v-disjoints entre ces deux ensembles.
Pour cette fonctionnalite, nous construisons un graphe biparti sur lequel nous appliquons
un calcul de ot maximal. La construction du graphe biparti necessite un algorithme dor-
dre de complexite O(M + N). Le calcul du ot maximal necessite, comme nous lavons
vu, un algorithme dordre de complexite en O(N
2
M). Ainsi, lordre de complexite total
de lalgorithme propose pour le calcul de la taille du couplage maximal est en O(N
2
M).
Exemple 4.6. Un exemple de calcul de couplage maximal entre deux ensembles de som-
mets est montre `a la gure 4.11. Apr`es la construction du graphe, nous selectionnons
licone de couplage maximal . Une fenetre souvre en demandant lensemble de som-
mets V
1
. Cet ensemble est selectionne avec licone de selection (selA). Ensuite, il
Chapitre 4. Bote `a outils danalyse structurelle LISA et divers aspects algorithmiques 95
sut dappuyer sur Next pour selectionner lensemble V
2
avec licone de selection
(selB). Finalement, Finish est appuyee et le resultat est montre par une fenetre qui
indique la taille du couplage maximal entre les ensembles V
1
et V
2
selectionnes.
Fig. 4.11 Calcul du couplage maximal entre deux ensembles de sommets
4.4 Algorithmes pour lanalyse des proprietes dob-
servabilite et de diagnosticabilite
Les algorithmes de base presentes aux paragraphes precedents sont utilises comme des
briques elementaires an de construire les dierents tests danalyse des proprietes struc-
turelles dobservabilite et de diagnosticabilite que nous presentons ci-dessous. En premier,
nous presentons lanalyse de la propriete dobservabilite totale de lentree et de letat
detaillee au paragraphe 2.2.3. Ensuite, nous presentons limplementation des conditions
danalyse du probl`eme de localisation de defauts traite dans [Commault et al., 2002a].
96 4.4. Algorithmes pour lanalyse des proprietes dobservabilite et de diagnosticabilite
Fig. 4.12 Icones servant `a la verication des proprietes dobservabilite et de diagnosti-
cabilite
4.4.1 Implementation de lanalyse de lobservabilite de letat et
de lentree
Lic one Observablelance la verication des conditions suivantes issues du corol-
laire 2.5 :
Cond1 : Chaque sommet de XFW est le predecesseur dun sommet de Y (condition
de connectivite).
Cond2 : X
0
0
V
ess
(
0
, Y
0
X
s
)
Cond3 :
_
W F X, X Y
_
= n + q
o` u les ensembles F et W representent lensemble des entrees inconnues note U dans notre
etude theorique du chapitre 2. Cette decomposition est liee au fait que le logiciel lisa a
ete concu avec un objectif de diagnostic, donc les entrees inconnues representent tant des
defauts que des perturbations quil est important de distinguer. De meme
0
represente
ici lensemble note U
0
dans le chapitre 2.
An de verier la condition Cond1, lalgorithme calcul de sommets predecesseurs
(page 89) est utilise. Nous verions que tous les sommets de X F W sont bien
Chapitre 4. Bote `a outils danalyse structurelle LISA et divers aspects algorithmiques 97
predecesseurs de Y. Lordre de complexite de lalgorithme veriant la condition Cond1
est donc en O(M).
Les etapes principales `a la verication de la condition Cond2 sont :
1. la mise en ouvre de la decomposition decrite ` a la denition 2.2,
2. le calcul de lensemble de sommets essentiels V
ess
(
0
, Y
0
X
s
),
3. enn, la verication de linclusion X
0
0
V
ess
(
0
, Y
0
X
s
).
La decomposition seectue par N calculs de taille maximale de chemins entre deux en-
sembles, dun calcul dun ensemble de separateurs de sortie et de N calculs de couplage
maximal. Ainsi, lordre de complexite de lalgorithme permettant la verication de lob-
servabilite generique de letat et de lentree est en O(N
3
M).
Enn, la verication de la condition Cond3 necessite le calcul de la taille dun couplage
maximal entre X F W et X Y. Aussi, lordre de complexite de lalgorithme utilise
pour la verication de la condition Cond3 est en O(N
2
M).
Les trois conditions etant veriees en serie, lordre de complexite total pour lanalyse de
lobservabilite de lentree et de letat est en O(N
3
M).
Exemple 4.7. La verication de lobservabilite dun syst`eme lineaire structure sur lisa
est tr`es simple. Apr`es la construction du graphe, il sut dappuyer sur licone destine `a
verier lobservabilite (gure 4.12) et le resultat sache sur une fenetre indiquant
si le syst`eme est observable ou pas. Dans la negative, la fenetre ache la cause possible
de la non observabilite ainsi que, les sommets qui ne satisfont pas les conditions dob-
servabilite (en rouge sur le logiciel).
`
A la gure 4.13, ces sommets sont entoures par un
trait-tiret.
4.4.2 Detectabilite et localisabilite des defauts
Les algorithmes de base de lisa permettent assez aisement dimplementer les condi-
tions de localisation de defauts etablies dans [Commault et al., 2002a]. Deux cas sont `a
98 4.4. Algorithmes pour lanalyse des proprietes dobservabilite et de diagnosticabilite
Fig. 4.13 Verication de lobservabilite de letat et de lentree inconnue
considerer : celui mono-defaut o` u nous supposons que le syst`eme ne peut etre soumis qu`a
un seul defaut ` a un instant donne. Le second cas, dit multi-defauts, traduit un syst`eme
pouvant etre soumis `a plusieurs defauts simultanement. La condition necessaire et su-
isante `a implementer est la suivante :
Cond. Multi-defauts : Lensemble de defauts associe ` a lensemble F
0
F est localisable
en utilisant un schema ` a base dobservateurs si et seulement si
(F W, Y) = (F
W, Y) + card(F
0
)
avec F
= F F
0
Cond. Mono-defaut : Lensemble de defauts associe ` a lensemble F
0
F est localisable
en utilisant un schema ` a base dobservateurs si et seulement si
f
i
, f
j
F
0
(F W f
i
, f
j
, Y) > (F W f
i
, Y)
Chapitre 4. Bote `a outils danalyse structurelle LISA et divers aspects algorithmiques 99
Il faut noter que nous distinguons entre lensemble de defauts `a localiser F
0
et lensemble
total de defaut F. Cela parce que, dans le cas multi-defauts, il peut etre interessant de
connatre la localisabilite de certains defauts par rapport aux perturbations W et les autre
defauts F
. Pour le cas mono-defaut linteret cest detudier la localisabilite dun defaut
f
i
par rapport ` a un autre f
j
.
Lic one Localisabilite permet de verier la condition Cond. Multi-defauts
une fois lensemble F
0
selectionne gr ace ` a lic one de selection (selA). Lalgorithme
est base sur celui permettant le calcul de la taille dun lien maximal. Il a un ordre de
complexite en O(N
2
M).
Exemple 4.8. Pour la verication de la localisabilite dun ensemble de sommets en util-
isant licone de localisabilite, il sut de selectionner, `a laide de selA le(s)
sommet(s) pour le(s)quel(s) nous souhaitons verier cette propriete. Le resultat sache
sur une fenetre indiquant la localisabilite pour le(s) sommet(s) choisi(s). Dans lexemple
presente `a la gure 4.14, le sommet f
1
a ete choisi pour veritcation.
Lic one duCalcul de lensemble des defauts localisables dans le cas multi-
defauts met en evidence tous les sommets de F associes aux composantes de defauts
localisables dans le cas multi-defauts. Lalgorithme est base sur celui permettant le calcul
de la taille dun lien maximal. Il a un ordre de complexite en O(N
3
M) car il requiert
O(N) fois le test precedent sur chaque composante f
i
F.
Lic one duCalcul de lensemble des defauts localisables dans le cas mono-
defauts met en evidence tous les sommets de F associes aux composantes de defauts
localisables dans le cas mono-defaut. Lalgorithme est base sur celui permettant le calcul
de la taille dun lien maximal. Il a un ordre de complexite en O(N
3
M) car il requiert
O(N) fois le test Cond. Mono-defaut sur chaque composante f
i
F
0
.
lisa inclut egalement dautres algorithmes dedies ` a lanalyse des syst`emes bilineaires.
100 4.4. Algorithmes pour lanalyse des proprietes dobservabilite et de diagnosticabilite
Fig. 4.14 Localisabilite des defauts : cas mono-defaut
Comme nous pouvons le constater, cest un logiciel ouvert et evolutif. Dans la section
suivante, nous discutons des diverses proprietes que lon pourrait implementer ` a court
terme dans cette bote ` a outils en speciant lordre de complexite attendu.
Exemple 4.9. La gure 4.15 illustre sur un exemple le calcul de lensemble de defauts
localisables dans le cas multi-defauts. Les sommets localisables sont montres en rouge sur
le logiciel. Ils sont entoures par un trait-tiret sur la gure. Dans le cas multi-defauts, les
sommets f
1
et f
2
sont localisables puisque nous pouvons constater que (F W, Y) = 3,
(W, Y) = 1 et card(F
0
) = 2 sachant que F
0
= f
1
, f
2
. Pour le cas mono-defaut nous
pouvons constater que (F W f
1
, f
2
, Y) = 3 est plus grand que (F W f
1
, Y) =
2 par exemple.
Chapitre 4. Bote `a outils danalyse structurelle LISA et divers aspects algorithmiques 101
Fig. 4.15 Localisabilite des defauts : cas multi-defauts
4.5 Perspectives et algorithmes implementables `a court
terme dans LISA
Plusieurs proprietes peuvent etre assez facilement implementees en utilisant les algo-
rithmes de base de lisa. Dautres, en revanche, necessiteraient des etudes et des recherches
supplementaires an de satisfaire ` a la contrainte qui est de nimplementer si possible que
des algorithmes dordre de complexite polyn omial. Dans ce paragraphe, nous presentons
quelques uns des resultats que nous envisageons de programmer dans lisa. Dabord,
nous discutons des resultats presentes dans ce manuscrit avant daborder dautres re-
sultats danalyse structurelle dont il est possible de trouver les details notamment dans
[Dion et al., 2003].
102 4.5. Perspectives et algorithmes implementables `a court terme dans LISA
4.5.1 Observabilite forte de tout letat
Lanalyse de cette propriete ne presente aucune diculte ` a etre implementee. En eet,
les conditions du corollaire 2.11 :
Cond1 : Chaque sommet de X est le predecesseur dun sommet de Y (condition de
connectivite).
Cond2 : X
0
V
ess
(
0
, Y
0
X
s
)
Cond3 :
_
W F X, X Y
_
= n +
_
W F, X Y
_
sont tr`es proches des conditions programmees pour lobservabilite forte de letat et de
lentree. La derni`ere etape necessiterait le calcul de la taille de deux couplages maximaux
au lieu dun seul, mais globalement nous pouvons considerer que la programmation de
la verication de la propriete dobservabilite forte ne necessite aucun eort particulier.
Lalgorithme utilise a un ordre de complexite egal ` a celui dedie ` a lobservabilite forte de
letat et de lentree i.e. O(N
3
M).
4.5.2 Observabilite forte dune partie donnee de lentree et de
letat
An de determiner si un ensemble de composantes de letat ou de lentree est forte-
ment observable, il faut soit determiner lensemble 1
obs
def
=
_
v X U, (Y v) =
(Y)
_
soit verier si (Y ) = (Y). Dans les deux cas, il sagit de calculer la fonction
() dont lexpression est donnee `a la denition 2.4. Cette fonction est la somme de deux
fonctions
0
() et
1
().
Pour un ensemble V tel que Y V X Y, lexpression de
0
() est donnee par :
0
(V)
def
=
_
U
0
(V), S
o
(V)
_
_
U
0
(V), S
o
(V)
_
. Levaluation de
0
() necessite une de-
composition du syst`eme qui seectue avec un algorithme dordre de complexite O(N
3
M)
dej` a programme dans lisa. Le calcul du nombre maximal de chemins
_
U
0
(V), S
o
(V)
_
est aussi programme dans lisa. Il reste donc ` a calculer la fonction
_
U
0
(V), S
o
(V)
_
qui retourne le nombre minimal de sommets couverts par un lien U
0
(V)-S
o
(V) maximal.
Chapitre 4. Bote `a outils danalyse structurelle LISA et divers aspects algorithmiques 103
Cette fonction peut etre implementee grace ` a lalgorithme primal-dual [Hovelaque et al., 1996]
qui aboutit `a un ordre de complexite en O(N
3
M). Pour levaluation de
0
(), un ordre
de complexite total en O(N
3
M) peut donc etre envisage.
Pour ce qui est de la fonction
1
(), elle est denie pour tout ensemble V tel que
Y V XY comme etant le nombre maximal de sommets de X
1
(V)X
s
(V)U
1
(V)
couverts par une union disjointe :
- dun lien X
s
(V) U
1
(V)-
1
(V) de taille
_
X
s
(V) U
1
(V),
1
(V)
_
,
- dune famille de chemins X
1
(V)-
1
(V) simples,
- dune famille de cycles ne couvrant que des elements de X
1
(V).
Jusque tr`es recemment, lalgorithme pense pour cette fonction etait base sur un balayage
de toutes les unions disjointes de chemins et de cycles pour evaluer celles qui couvrent
le maximum de sommets. Cette solution conduit evidemment ` a un ordre de complexite
exponentiel. Cependant, les travaux de M. Taha Boukhobza sur lobservabilite des sys-
t`emes bilineaires ` a entrees inconnues lont amene `a transformer le graphe original an
que levaluation de
1
() revienne juste ` a determiner le nombre maximum de sommets
couverts par une famille de chemins disjoints. Ensuite, par des recherches successives de
chemins les plus longs et par des transformations iteratives du graphe dorigine, il aboutit
` a des graphes plus simples formes de chemins tous disjoints connectes aux sommets de
sortie et couvrant un nombre maximal de sommets plus une partie de graphe non connec-
tee aux sommets de sortie. Lordre de complexite de cet algorithme serait polynomial car
il ne ferait appel qu`a des algorithmes dordre de complexite polynomial. Cette approche
est encore en developpement et pourrait aboutir dans les mois qui viennent ` a une imple-
mentation de la fonction ().
Une fois cet algorithme de calcul de () mis en uvre, lanalyse de lobservabilite partielle
pourrait rapidement etre implementee.
104 4.5. Perspectives et algorithmes implementables `a court terme dans LISA
4.5.3 Placement de capteurs pour lobservabilite forte de tout
letat
Les trois etapes de placement de capteurs pour le recouvrement de lobservabilite forte
de tout letat reposent essentiellement sur :
- La determination des composantes connexes et leur ordonnancement pour le recouvre-
ment de la condition de connectivite : cela peut se faire respectivement par les algorithmes
dedies `a levaluation du nombre de chemins disjoints entre deux sommets ou levaluation
des ensembles de successeurs et de predecesseurs et au calcul de la taille de couplage entre
deux composantes connexes.
Ainsi, trouver les composantes connexes minimales reposerait sur des algorithmes de base
dej` a programmes ce qui induirait un algorithme dordre de complexite polynomial.
- Le calcul de la taille de couplages maximaux et lapplication de la decomposition
de Dulmage-Mendelsohn pour le recouvrement de la condition de couplage : les al-
gorithmes de la decomposition de Dulmage-Mendelsohn existent dans plusieurs biblio-
th`eques et aboutissent ` a un ordre de complexite en O(M
2
) [Lovasz et Plummer, 1986,
Chen et Kanj, 2003].
- Le calcul de separateurs de sortie pour le recouvrement de la condition de distance : ces
outils sont dej` a programmes dans lisa.
En resume, limplementation de laide au placement de capteurs pour le recouvrement de
la propriete dobservabilite forte serait assez aisee ` a realiser ` a partir des outils existant
dans lisa et dans la litterature classique de la theorie des graphes.
4.5.4 Placement de capteurs pour lobservabilite partielle
La strategie proposee de placement de capteurs pour le recouvrement de lobservabilite
forte dun ensemble donne de composantes de letat se deroule en deux etapes. La pre-
mi`ere est relative au recouvrement de la condition de connectivite ` a la sortie. Comme cela
est decrit dans le paragraphe precedent, il est possible dassocier les algorithmes de base
permettant levaluation des ensembles de successeurs et de predecesseurs et levaluation
Chapitre 4. Bote `a outils danalyse structurelle LISA et divers aspects algorithmiques 105
de la taille de couplage entre deux composantes connexes.
La seconde etape necessite, quant ` a elle, lutilisation de la fonction () pour la deter-
mination des ensembles
x,k
. Comme cela a ete discute auparavant, lalgorithme relatif `a
cette fonction est en cours de conception. Cela reste la seule diculte avant limplementa-
tion dune fonctionnalite de placement de capteurs pour le recouvrement de lobservabilite
forte dun ensemble donne de composantes. En eet, pour le reste, il sut dordonner des
ensembles de sommets par rapport ` a la relation dinclusion des ensembles. La solution
du syst`eme de contraintes (3.2) pourrait se faire par une decomposition de Dulmage-
Mendelsohn.
4.5.5 Implementation doutils danalyse dautres proprietes
structurelles
La nalite de lisa etant de proposer une panoplie doutils danalyse la plus large pos-
sible, il est prevu dimplementer les resultats relatifs `a dautres proprietes structurelles
des syst`emes lineaires que celles que nous avons etablies.
Ainsi, en utilisant les algorithmes de base de lisa, lanalyse de la propriete de command-
abilite, propriete duale de lobservabilite, est programmable sans eort.
Par ailleurs, une fois le calcul de la fonction () mis au point, la fonctionnalite calculant
le nombre generique de zeros invariants du syst`eme pourra etre rajoutee.
Lanalyse du probl`eme de decouplage par retour detat [Dion et Commault, 1993] utilise
le calcul du nombre maximal de chemins disjoints entre deux ensembles ainsi que le nom-
bre minimal de sommets couverts par un lien entree-sortie maximal. Lalgorithme de base
pour le calcul du premier nombre existe dej`a. Quant au second nombre, il est calculable
par lalgorithme primal-dual [Hovelaque et al., 1996]. Cette fonctionnalite serait imple-
mentable assez aisement. Il en est de meme pour la solvabilite du probl`eme de rejet de
perturbations par retour detat ou retour de sortie ainsi que la caracterisation de la struc-
ture ` a linni et des dimensions de dierents sous-espaces invariants qui requi`erent ces
memes outils de base.
106 4.6. Conclusion
4.6 Conclusion
Dans ce chapitre, nous avons decrit la bote `a outils lisa en presentant dabord ses
objectifs et les principes qui ont guide sa conception ` a savoir lelaboration dun outil
danalyse structurelle complet sur plateforme logicielle libre et avec une attention partic-
uli`ere portee aux aspects calculatoire et algorithmique. Lelaboration de lisa repose sur
des algorithmes de base tels que le calcul de la taille maximale dun lien, dun couplage,
la determination de separateurs,... Ces algorithmes ont ete repris de travaux classiques de
la theorie des graphes et adaptes. Dautres outils de base seraient encore necessaires tels
que le calcul du nombre minimal ou maximal de sommets couverts par un lien de taille
maximale an davoir un logiciel complet. Cest une partie du travail auquel se consacrent
M. Taha Boukhobza et M. Frederic Hamelin et qui constitue un element du projet de
recherche de lequipe-projet dirigee par ce dernier.
Les programmes danalyse de certaines proprietes dobservabilite et de diagnosticabilite
ont dores et dej` a ete implementes par assemblage des algorithmes de base. Nous avons
presente ceux relatifs ` a lobservabilite de letat et de lentree ainsi que ceux lies ` a la
solubilite du probl`eme de localisation de defauts. Lordre de complexite des algorithmes
utilises est polynomial et explicite en fonction du nombre darcs et de sommets du graphe
representant le syst`eme.
Enn, nous avons bri`evement discute des possibilites oertes par lisa pour lanalyse des
syst`emes lineaires, une fois que les deux algorithmes de base manquants seraient mis au
point.
5
Conclusions
Le travail de th`ese presente dans ce document traite dierentes proprietes liees ` a lob-
servabilite des syst`emes ` a entrees inconnues par approche graphique. Les outils danalyse
developpes peuvent saverer importants dans le cadre de la synth`ese dobservateurs, des-
timateurs dentrees utiles `a la synth`ese de lois de commandes tolerantes aux defauts ou
robustes par rapport aux perturbations, ou encore lorsquil sagit de verier si la propriete
dobservabilite dun syst`eme nest pas alteree lorsquil est soumis ` a des perturbations, voire
` a des defauts damplitude susamment importante pour ne pas etre negliges.
Le manuscrit est structure en trois parties principales. Dans la premi`ere, nous avons aborde
lanalyse de dierentes proprietes dobservabilite. Plus precisement, nous avons tout
dabord presente une decomposition graphique du syst`eme etudie en deux sous-syst`emes
particuliers en cascade. Les proprietes de ces sous-syst`emes, dont le premier est carre et le
second a un faisceau de matrices de rang plein colonne meme apr`es leacement de lune de
ses lignes, choisie arbitrairement, sont demontrees. Ainsi, il est prouve que lobservabilite
du syst`eme original est equivalente ` a lobservabilite des deux sous-syst`emes pris separe-
ment. Les conditions necessaires et susantes dobservabilite de lentree et de letat dun
syst`eme lineaire ont alors ete etablies en utilisant les theor`emes de [van der Woude, 2000].
En parametrant la decomposition du syst`eme par un ensemble de sommets, nous avons
exprime `a laide dune fonction graphique notee des conditions necessaires et susantes
107
108
pour lobservabilite forte dune partie donnee des composantes de lentree et de letat.
Cette fonction est relative au nombre generique de zeros invariants du syst`eme qui a
ete caracterise graphiquement dans [van der Woude, 2000, van der Woude et al., 2003].
Le dernier resultat de cette partie concerne lobservabilite forte de tout letat dun sys-
t`eme `a entrees inconnues. Des conditions necessaires et susantes ont ete demontrees.
En ce qui concerne les proprietes dobservabilite de letat et de lentree et lobservabilite
forte de letat, les conditions sont exprimees en termes de nombre de chemins disjoints,
de sommets essentiels et de taille de couplage maximal.
La seconde partie de cette th`ese a consiste `a etudier le probl`eme du placement de capteurs
an de recouvrer la propriete dobservabilite forte lorsque les conditions mentionnees au
paragraphe ci-dessus ne sont pas veriees. Deux cas ont ete traites. Le premier concerne
la propriete dobservabilite forte dune partie donnee de letat. La strategie du placement
de capteurs consiste alors en une condition necessaire permettant dimposer quau moins
une sortie du syst`eme soit sensible ` a chacune des composantes de letat devant etre forte-
ment observables. Cette condition repose sur la decomposition des sommets du graphe
en composantes connexes qui sont ensuite partiellement ordonnees. La seconde etape du
placement de capteurs consiste en la determination dun certain nombre densembles via
la fonction precedemment citee. Puis, ces ensembles sont aussi partiellement ordon-
nes par la relation dinclusion. Enn, un syst`eme de relations graphiques est utilise pour
assurer quune conguration de capteurs assure lobservabilite forte des composantes de
letat choisies. La strategie proposee pour le recouvrement de lobservabilite dune partie
de letat soure de plusieurs faiblesses. En premier lieu, elle est deduite de conditions juste
susantes et non necessaires. Le nombre minimal de capteurs necessaires pour resoudre
le probl`eme considere nest pas donne. Enn, il existe certaines congurations de capteurs
aussi valables pouvant mesurer des variables qui ne se trouvent pas dans les ensembles
calcules.
Le second probl`eme de placement de capteurs a pour objectif de rendre observables toutes
les composantes de letat. Le probl`eme a ete traite en trois etapes. Pour chacune delles,
des conditions necessaires et susantes au placement de capteurs ont ete trouvees. Le
Chapitre 5. Conclusions 109
nombre minimal de capteurs necessaires et susants a aussi ete determine. Cependant, le
fait de fragmenter le probl`eme en trois parties peut mener `a des congurations de capteurs
non optimales en termes de nombre. Lordre dans lequel les etapes sont traitees peut etre
important. Les conditions trouvees sont fondees essentiellement sur la decomposition de
Dulmage-Mendelsohn, sur un calcul de separateurs, de nombre de chemins disjoints et sur
lordonnancement de certains ensembles.
La troisi`eme partie traite de limplementation des resultats etablis dans une bote ` a outils
dediee ` a lanalyse structurelle des syst`emes lineaires et bilineaires structures. En premier
lieu, les motivations qui ont conduit ` a la conception de cette bote ` a outils sont exposees.
Il en a decoule un certain cahier des charges concernant la plateforme de programmation
et les algorithmes utilises. La structure de lisa a ensuite ete presentee. Elle repose enti`ere-
ment sur des algorithmes de base tels que la determination des ensembles de successeurs
et de predecesseurs, le calcul des tailles de liens et de couplage maximaux entre deux
ensembles de sommets, la caracterisation des ensembles de sommets essentiels dans des
liens de taille maximale ou encore la denition des separateurs dentree et de sortie. Tous
ces algorithmes ont des ordres de complexite polynomiaux. Nous avons montre comment
en associant certains algorithmes de base, nous sommes arrives `a analyser lobservabilite
de letat et de lentree et `a etablir des conditions de detection et de localisation de de-
fauts [Commault et al., 2002a]. Enn, nous avons discute des fonctions qui peuvent etre
rajoutees `a lisa concernant dierentes proprietes structurelles an den faire un outil d-
analyse plus complet.
Cette th`ese a eu pour objectif de proposer un outil supplementaire `a ce qui existe dans le
cadre de lanalyse des syst`emes lineaires. Elle a permis de caracteriser graphiquement une
propriete structurelle traitee jusque l`a principalement par des methodes algebriques et
geometriques. Dun autre cote, lanalyse des proprietes dobservabilite pour les syst`emes ` a
entrees inconnues, largement etudies par ailleurs, representait lune des rares analyses non
encore eectuees par approche graphique jusque-l` a. Ainsi, notre etude sur lobservabilite
des syst`emes ` a entrees inconnues tente de combler ce manque en considerant tous les cas
110
possibles i.e. lobservabilite de tout ou dune quelconque partie de letat et de lentree
inconnue.
Pour ce qui est de letude du placement de capteurs, lapproche graphique semble orir
de bons avantages. Il reste cependant `a approfondir la partie concernant le recouvrement
de lobservabilite forte dune partie de letat an darriver `a des conditions necessaires et
susantes. Neanmoins, de prime abord le probl`eme semble etre assez dicile pour prevoir
une solution immediate en perseverant avec les memes outils. Lutilisation dautres outils
graphiques ou dautres separateurs que ceux dentree et de sortie pourrait etre envisagee.
Une decomposition du probl`eme en plusieurs etapes peut aussi deboucher sur des con-
ditions necessaires et susantes, mais pour cela il faudrait aussi decliner la condition
dobservabilite forte exprimee en fonction de en plusieurs conditions qui lui seraient
equivalentes ensemble.
Un autre probl`eme de placement de capteurs quil serait interessant `a traiter, et pour
lequel nous pensons avoir les cles est celui dont lobjectif serait la solubilite du probl`eme
de rejet de perturbations par retour de sortie. En eet, les conditions de solubilite de ce
probl`eme sont relativement proches de la condition de distance.
Enn, en termes dimplementation, deux algorithmes de base devront etre programmes
sur lisa avant de pouvoir en faire une bote relativement compl`ete pour ce qui est des
syst`emes lineaires. Le premier concerne le calcul du nombre minimal de sommets couverts
dans un lien maximal entre deux ensembles. Il peut etre fonde sur lalgorithme primal-dual
[Hovelaque et al., 1996]. Le second algorithme est relatif au calcul du nombre maximal de
sommets couverts par une union disjointe :
- dun lien de taille maximale,
- dune famille de chemins Y -cime simples,
- dune famille de cycles.
Cet algorithme devra avoir un ordre de complexite polynomial, ce qui ne le rend pas trivial.
Sa synth`ese permettrait une avancee certaine pour lanalyse des probl`emes dobservabilite
et le calcul du nombre generique de zeros invariants dun syst`eme.
Bibliographie
[Andre, 1985] Andr e, N. (1985). Sparse Systems, Digraph Approach of Large-Scale Lin-
ear Systems Theory. T
UV, Koln, Germany. 5
[Bang-Jensen et Gutin, 2006] Bang-Jensen, J. et Gutin, G. (2006). Digraphs : Theory,
Algorithms and Applications. Springer-Verlag, London, U.K., 2
nd
edition. 90
[Basile et al., 1981] Basile, G., Hamano, F. et Marro, G. (1981). Some new results
on unknown input observability. In IFAC World Congress, pages 2124, Kyoto, Japan.
5, 24, 27
[Basile et Marro, 1969] Basile, G. et Marro, G. (1969). On observability of linear
time-invariant systems with unknown inputs. Journal of Optimization Theory and
Applications, 3:410415. 5, 24, 27, 44, 56
[Basile et Marro, 1973] Basile, G. et Marro, G. (1973). A new characterization of some
structural properties of linear systems : unknown-input observability, invertibility and
functional controllability. International Journal of Control, 17(5):931943. 5, 24, 27
[Blanke et al., 2003] Blanke, M., Kinnaert, M., Lunze, J. et Staroswiecki, M.
(2003). Diagnosis and Fault-Tolerant Control. Springer-Verlag, Heidelberg. 12
[Blanke et Lorentzen, 2006] Blanke, M. et Lorentzen, T. (2006). SATOOL - a soft-
ware tool for structural analysis of complex automation systems. In IFAC Safeprocess
Conference, Beijing, China. 84
[Boukhobza et al., 2005] Boukhobza, T., Hamelin, F., Join, C. et Sauter, D. (2005).
Input and state functional observability for descriptor systems. In IFAC World
Congress, Praha, Czech Republic. 27
111
112
[Chen et Kanj, 2003] Chen, J. et Kanj, I. A. (2003). Constrained minimum vertex cover
in bipartite graphs : Complexity and parameterized algorithms. Journal-of-Computer-
and-System-Sciences, 67(4):833847. 104
[Commault et Dion, 2007] Commault, C. et Dion, J. M. (2007). Sensor location for
diagnosis in linear Systems : a structural analysis. IEEE Transactions on Automatic
Control, 52(2):155169. 19, 62, 72, 78, 80
[Commault et al., 2005a] Commault, C., Dion, J. M. et Agha, S. Y. (2005a). A system
decomposition for sensor location in fault detection and isolation. In IFAC World
Congress, Praha, Czech Republic. 62
[Commault et al., 2006] Commault, C., Dion, J. M. et Agha, S. Y. (2006). Structural
analysis for the sensor location problem in fault detection and isolation. In IFAC
Safeprocess Conference, Beijing, China. 19, 62, 80
[Commault et al., 1993] Commault, C., Dion, J. M. et Benahcene, M. (1993). Output
feedback disturbance decoupling. graph interpretation for structured systems. Automat-
ica, 29(6):14631472. 5
[Commault et al., 1999] Commault, C., Dion, J. M. et Benahcene, M. (1999). De-
coupling of structured systems by parameter-independent compensation and state feed-
back. IEEE Transactions on Automatic Control, 44(2):348352. 5
[Commault et al., 1997] Commault, C., Dion, J. M. et Hovelaque, V. (1997). A
geometric approach for structured systems : Application to disturbance decoupling.
Automatica, 33(3):403409. 5, 47
[Commault et al., 1991] Commault, C., Dion, J. M. et Perez, A. (1991). Disturbance
rejection for structured systems. IEEE Transactions on Automatic Control, 36(7):884
887. 5
[Commault et al., 2001] Commault, C., Dion, J. M., Sename, O. et Motyeian, R.
(2001). Unknown input observer - a structural approach. In European Control Confer-
ence, Porto, Portugal. 6, 24, 59
Bibliographie 113
[Commault et al., 2002a] Commault, C., Dion, J. M., Sename, O. et Motyeian, R.
(2002a). Observer-based fault diagnosis for structured systems. IEEE Transactions on
Automatic Control, 47(12):20742079. 5, 12, 95, 97, 109
[Commault et al., 2005b] Commault, C., Dion, J. M. et Trinh, D. H. (2005b). Ob-
servability recovering by additional sensor implementation in linear structured systems.
In IEEE Conference on Decision and Control, and the European Control Conference,
Seville, Spain. 7, 19, 61, 63, 64, 72, 73, 74, 80
[Commault et al., 2002b] Commault, C., Dion, J. M. et van der Woude, J. W. (2002b).
Characterization of generic properties of linear structured systems for ecient compu-
tations. Kybernetika, 38(5):503520. 12
[Demetriou, 2005] Demetriou, M. A. (2005). Robust sensor location and optimization
in distributed parameter systems using functional observers. In IEEE Conference on
Decision and Control, European Control Conference, pages 71877192, Seville, Spain.
6
[Dion et Commault, 1993] Dion, J. M. et Commault, C. (1993). Feedback decoupling
of structured systems. IEEE Transactions on Automatic Control, 38(7):11321135. 5,
105
[Dion et al., 1994] Dion, J. M., Commault, C. et Montoya, J. (1994). Simultaneous
decoupling and disturbance Rejection : a structural approach. International Journal of
Control, 59:13251344. 5
[Dion et al., 2001] Dion, J. M., Commault, C. et van der Woude, J. W. (2001).
Generic properties and control of linear structured systems. In IFAC Symposium on
System Structure and Control, Praha, Czech Republic. 12
[Dion et al., 2003] Dion, J. M., Commault, C. et van der Woude, J. W. (2003).
Generic properties and control of linear structured systems : a survey. Automatica,
39(7):11251144. 12, 24, 41, 101
114
[Floquet et Barbot, 2006] Floquet, T. et Barbot, J.-P. (2006). An observability form
for linear systems with unknown inputs. International Journal of Control, 79(2):132
139. 5
[Ford et Fulkerson, 1962] Ford, L. R. et Fulkerson, D. R. (1962). Flows in Networks.
Princeton University Press. 90
[Frisk et Krysander, 2007] Frisk, E. et Krysander, M. (2007). Sensor placement for
maximum fault isolability. In DX-07, pages 106113, Nashville, U.S.A. 20
[Glover et Silverman, 1976] Glover, K. et Silverman, L. M. (1976). Characterization
of structural controllability approach. IEEE Transactions on Automatic Control, AC-
21(4):534537. 11
[Guidorzi et Marro, 1971] Guidorzi, R. et Marro, R. (1971). On wonham stabilizabil-
ity condition in the synthesis of observers for unknown-input systems. IEEE Transac-
tions on Automatic Control, AC-16:499500. 5, 24
[Hautus, 1983] Hautus, M. (1983). Strong detectability and observers. Linear Algebra
and its Applications, 50:353360. 5, 24, 26, 44, 56
[Hou et M uller, 1994] Hou, M. et M uller, P. C. (1994). Design of decentralized linear
state function observers. Automatica, 30(11):18011805. 55
[Hou et M uller, 1999] Hou, M. et M uller, P. C. (1999). Observer design for descriptor
systems. IEEE Transactions on Automatic Control, 44(1):164169. 25
[Hou et Patton, 1998] Hou, M. et Patton, R. J. (1998). Input observability and input
reconstruction. Automatica, 34(6):789794. 5
[Hovelaque et al., 1996] Hovelaque, V., Commault, C. et Dion, J. M. (1996). Analysis
of linear structured systems using a primal-dual algorithm. Systems & Control Letters,
27:7385. 103, 105, 110
[Kailath, 1980] Kailath, T. (1980). Linear systems. Prentice Hall Information and
system science series. Prentice Hall, Englewood Clis. 3, 24
Bibliographie 115
[Kalman, 1968] Kalman, R. E. (1968). Lectures on controlability and observability. In
Proceedings of C.I.M.E. (International Mathematical Summer Center), Bologna, Italy.
24
[Khemliche et al., 2006] Khemliche, M., Bouamama, B. O. et Haffaf, H. (2006). Sen-
sor placement for component diagnosability using bond-graph. Sensors and Actuators :
A Physical, 132(2):547556. 20
[Khosrowjerdi et al., 2007] Khosrowjerdi, M. J., Safari-Shad, N. et Nikoukhah,
R. (2007). Optimal sensor location for robust fault detection. In European Control
Conference, pages 402407, Kos, Greece. 6
[Kratz, 1995] Kratz, W. (1995). Characterization of strong observability and construc-
tion of an observer. Linear algebra and its applications, 221:3140. 5
[Lin, 1974] Lin, C. T. (1974). Structural controllability. IEEE Transactions on Automatic
Control, AC-19(3):201208. 4, 5, 11
[Linnemann, 1981] Linnemann, A. (1981). Decoupling of structured systems. System &
Control Letters, 1:7986. 5
[Liu et al., 2003] Liu, X., Chen, B. M. et Li, Z. (2003). On the problem of general
structural assignments of linear systems through sensor/actuator selection. Automatica,
39(2):233241. 6
[Lovasz et Plummer, 1986] Lovasz, L. et Plummer, M. D. (1986). Matching Theory,
volume 29 de Annals of Discrete Mathematics. North-Holland, Amsterdam, Nether-
lands. 104
[Maquin et al., 1994] Maquin, D., Luong, M. et Ragot, J. (1994). Observability anal-
ysis and sensor placement. In IFAC SAFEPROCESS94/IMACS Symposium on Fault
Detection, Supervision and Safety for Technical Process, Espoo, Finland. 6, 20
[Maquin et al., 1995] Maquin, D., Luong, M. et Ragot, J. (1995). Some ideas about
the design of measurement systems. In European Control Conference, pages 31783183,
Rome, Italy. 20
116
[Martinez-Martinez et al., 2007] Martinez-Martinez, S., Mader, T., Boukhobza,
T. et Hamelin, F. (2007). LISA : a linear structured system analysis program. In
IFAC Symposium on System, Structure and Control, Foz do Iguacu, Bresil. 7, 84
[Meyer et al., 1994] Meyer, M., Lann, J. M. L., Koehret, B. et Enjalbert, M.
(1994). Optimal selection of sensor location on a complex plant using a graph ori-
ented approach. Computers & Chemical Engineering, 18:S535S540. 6
[Murota, 1987] Murota, K. (1987). System Analysis by Graphs and Matroids. Springer-
Verlag, New York, U.S.A. 5, 8, 12, 24, 35, 41, 90
[Ragot et al., 1992] Ragot, J., Maquin, D. et Bloch, G. (1992). Sensor positionning
for processes described by bilinear equations. Diagnostic et S urete de Fonctionnement,
2. 6
[Rahmani et al., 1997] Rahmani, A., Sueur, C. et Dauphin-Tanguy, G. (1997). Ap-
proche des bond graphs pour analyse structurelle de syst`emes lineaires. Automatica,
259:101131. 12
[Reinschke, 1988] Reinschke, K. J. (1988). Multivariable Control. A Graph Theoretic
Approach. Springer-Verlag, New York, U.S.A. 5, 12, 24, 41
[Rosenbrock, 1970] Rosenbrock, H. (1970). State-space and multivariable theory. Stud-
ies in dynamical systems. Nelson Wiley, London. 3, 24
[Saif et Guan, 1992] Saif, M. et Guan, Y. (1992). Decentralized state estimation in
large-scale interconnected dynamical systes. Automatica, 28(1):215219. 55
[Sain et Massey, 1969] Sain, M. K. et Massey, J. L. (1969). Invertibility of linear time-
invariant dynamical systems. IEEE Transactions on Automatic Control, AC-14(2):141
149. 5, 24
[Shields et Pearson, 1976] Shields, R. W. et Pearson, J. B. (1976). Structural con-
trollability of multi-input linear systems. IEEE Transactions on Automatic Control,
AC-21(2):203212. 11
[Silverman, 1969] Silverman, L. M. (1969). Inversion of multivariable linear systems.
IEEE Transactions on Automatic Control, AC -14(3):270276. 5
Bibliographie 117
[Staroswiecki, 2006] Staroswiecki, M. (2006). Observability and the Design of Fault
Tolerant Estimation Using Structural Analysis, pages 257278. Advances in Control
Theory and Application. Springer. 55
[Trave-Massuy`es et al., 2001] Trav
e-Massuy
`
es, L., Escobet, T. et Milne, R. (2001).
Model-based diagnosability and sensor placement. application to a frame 6 gas turbine
subsystem. In DX01 International Workshop on Principles of Diagnosis, pages 205
212, Nashville, U.S.A. 20
[Trave-Massuyes et al., 2006] Trave-Massuyes, L., Escobet, T. et Olive, X. (2006).
Diagnosability analysis based on component-supported analytical redundancy re-
lations. IEEE-Transactions-on-Systems,-Man-and-Cybernetics,-Part-A-Systems-and-
Humans, 36(6):11461160. 20
[Trentelman et al., 2001] Trentelman, H. L., Stoorvogel, A. A. et Hautus, M.
(2001). Control Theory for Linear Systems. Springer, London, U.K. 5, 26, 47, 56
[van de Wal et de Jager, 2001] van de Wal, M. et de Jager, B. (2001). A review of
methods for input/output selection. Automatica, 37(4):487510. 6
[van der Woude, 2000] van der Woude, J. (2000). The generic number of invariant zeros
of a structured linear system. SIAM Journal of Control and Optimization, 38(1):121.
27, 33, 37, 38, 39, 47, 48, 49, 59, 107, 108
[van der Woude, 1991] van der Woude, J. W. (1991). A graph theoretic characterization
for the rank of the transfer matrix of a structured system. Mathematics of Control,
Signals and Systems, 4(1):3340. 10
[van der Woude, 1991] van der Woude, J. W. (1991). On the structure at innity of a
structured system. Linear Algebra and its Application, 148:145169. 10, 37
[van der Woude, 1993] van der Woude, J. W. (1993). Disturbance decoupling by mea-
surement feedbck for structured linear Systems : a graph theoretical approach. In
European Control Conference, pages 11321137. 5
[van der Woude, 1996] van der Woude, J. W. (1996). Disturbance decoupling by mea-
118
surement feedback for structured transfer matrix systems. Automatica, 32(3):357363.
5, 12
[van der Woude et al., 2003] van der Woude, J. W., Commault, C. et Dion, J. M.
(2003). Zero orders and dimensions of some invariant subspaces in linear structured
systems. Mathematics of Control, Signals and Systems, 16:225237. 12, 27, 34, 47, 108
[van der Woude et Murota, 1995] van der Woude, J. W. et Murota, K. (1995). Dis-
turbance decoupling with pole placement for structured Systems : a graph-theoretic
approach. SIAM Journal on Matrix Analysis and Applications, 16(3):922942. 5, 12
[Willems, 1986] Willems, J. L. (1986). Structural controllability and observability. Sys-
tem & Control Letters, 8(1):512. 8, 24
[Wonham, 1985] Wonham, W. M. (1985). Linear multivariable control : a geometric
approach, volume 10 de Applications of mathematics. Springer-Verlag, New York, 3
rd
edition. 3, 11, 24
[Yamada et Saga, 1985] Yamada, T. et Saga, T. (1985). A sucient condition for struc-
tural decouplability of linear nonsquare systems. IEEE Transactions on Automatic
Control, AC-30(9):918921. 5
[Zadeh et Desoer, 1963] Zadeh, L. et Desoer, C. (1963). Linear system theory.
MacGraw-Hill Book Company. 3, 24
Resume
Le travail de th`ese presente dans ce document traite de lanalyse de dierentes pro-
prietes liees ` a lobservabilite des syst`emes ` a entree inconnue par approche graphique. La
simplicite de mise en uvre de lapproche graphique permet de se defaire des dicultes
numeriques inherentes aux approches geometrique et algebrique. Ce constat a conduit
ces derni`eres decennies, ` a une serie detudes structurelles basees sur lapproche graphique.
Parmi les proprietes encore non abordees graphiquement, lobservabilite forte traduit lob-
servabilite des variables detat dun syst`eme pour toute valeur dentree ainsi que lobserv-
abilite conjointe de letat et de lentree. Ces proprietes plus fortes que lobservabilite simple
et le diagnostic nous ont paru utiles et pertinentes `a etudier. En eet, les outils danalyse
developpes peuvent saverer importants dans le cadre de la synth`ese dobservateurs ou
destimateurs dentrees utile `a la synth`ese de lois de commandes tolerantes aux defauts
ou robustes aux perturbations, ou encore quand il sagit de verier si la propriete dob-
servabilite dun syst`eme nest pas alteree lorsquil est soumis ` a des perturbations, voire `a
des defauts damplitude trop importante pour etre negliges. Le manuscrit est structure en
trois parties. Dans la premi`ere, nous avons aborde lanalyse de dierentes proprietes dob-
servabilite. Plus precisement, nous avons tout dabord donne des conditions necessaires et
susantes dobservabilite de lentree et de letat dun syst`eme. Des conditions necessaires
et susantes pour lobservabilite forte dune partie donnee des composantes de lentree
et de letat ont ensuite ete etablies. Le dernier resultat de cette partie concerne lobserv-
abilite forte de tout letat dun syst`eme ` a entree inconnue. Des conditions necessaires et
susantes ont ete demontrees. La seconde partie de cette th`ese a consiste `a etudier le
probl`eme du placement des capteurs an de recouvrer des proprietes dobservabilite forte
lorsque les conditions de la premi`ere partie ne sont pas veriees. Deux cas ont ete traites.
Le premier concerne la propriete dobservabilite forte dune partie donnee de letat. La
strategie de placement de capteurs consiste alors en une condition necessaire permettant
119
dimposer quau moins une sortie du syst`eme soit sensible `a chacune des composantes de
letat devant etre fortement observables, puis en un syst`eme de relations graphiques, util-
ise comme condition susante ` a ce quune conguration de capteurs assure lobservabilite
forte des composantes de letat choisies. Le second probl`eme de placement de capteurs a
pour objectif de rendre observables toutes les composantes de letat. Le probl`eme a ete
traite en trois etapes. Pour chacune delles, des conditions necessaires et susantes sur
le placement de capteurs ont ete trouvees. Le nombre minimal de capteurs necessaire et
susant a aussi ete determine. Les conditions trouvees sont fondees essentiellement sur
des algorithmes classiques de la theorie des graphes. La troisi`eme partie traite de lim-
plementation des resultats etablis dans une bote ` a outils dediee `a lanalyse structurelle
(LISA) des syst`emes lineaires et bilineaires structures. En premier lieu, les motivations qui
ont conduit `a la conception de cette bote `a outils sont exposees. La structure de LISA est
ensuite presentee. Elle repose enti`erement sur des algorithmes de base tels que la determi-
nation des ensembles de successeurs et de predecesseurs, le calcul des tailles de lien et de
couplages maximaux entre deux ensembles de sommets et la caracterisation des ensembles
de sommets essentiels dans des liens de taille maximale ou encore des separateurs den-
tree et de sortie. Tous ces algorithmes ont des ordres de complexite polynomiaux. Nous
avons montre comment en associant certains algorithmes de base, nous sommes arrives
` a analyser lobservabilite de letat et de lentree et ` a etablir des conditions de detection
et de localisation de defauts. Enn, il est presente des fonctions pouvant etre rajoutees ` a
LISA concernant dierentes proprietes structurelles pour en faire un outil danalyse plus
complet.
Mots-cles: Syst`emes lineaires, syst`emes structures, observabilite forte, observabilite de
lentree inconnue, theorie de graphes, graphes orientes, placement de capteurs
120
Vous aimerez peut-être aussi
- Ti 2Document2 pagesTi 2Jean Bosco Albert RandriamampiandraPas encore d'évaluation
- Carojoin Derbigum Fiche TechniqueDocument2 pagesCarojoin Derbigum Fiche TechniqueYassin AdhriPas encore d'évaluation
- Audit Et Contrôle Interne Une Activité Ignorée Par Les EPEDocument1 pageAudit Et Contrôle Interne Une Activité Ignorée Par Les EPEMessa BoualemPas encore d'évaluation
- Recos 4e Definition IDM 2018Document10 pagesRecos 4e Definition IDM 2018Simona IonitaPas encore d'évaluation
- DN214Document8 pagesDN214Den LeonidasPas encore d'évaluation
- Beirut University Letter of Motivation For Landscape Architecture MasterDocument2 pagesBeirut University Letter of Motivation For Landscape Architecture MasterBEIRUT100% (2)
- RGPH-5 Manuel AR v30032023 Ok Fin Mars 2023+coord OKDocument76 pagesRGPH-5 Manuel AR v30032023 Ok Fin Mars 2023+coord OKLa RosePas encore d'évaluation
- Sujet Linux - SRI 2020 Principal CorrigéDocument9 pagesSujet Linux - SRI 2020 Principal CorrigéAnass HamzaouiPas encore d'évaluation
- Fanuc Serie 16 PDFDocument1 119 pagesFanuc Serie 16 PDFKhalil Radouane100% (1)
- D1 1S1 2019 LSLL Wahab-DiopFirstDocument2 pagesD1 1S1 2019 LSLL Wahab-DiopFirstYaya Touré100% (1)
- Rapport de Stage 3e GRABEDocument19 pagesRapport de Stage 3e GRABESamuel SalisPas encore d'évaluation
- Evaluation D'actions Et D'entreprisesDocument41 pagesEvaluation D'actions Et D'entrepriseskra kobena BINIPas encore d'évaluation
- Synthèses InfoDocument98 pagesSynthèses InfoJasmin AbdallahPas encore d'évaluation
- Canon mf740 mf746 mf744 mf742Document4 pagesCanon mf740 mf746 mf744 mf742InoleroiPas encore d'évaluation
- Memoire Kouider Elouahed Chahinez Et Malaoui NihelDocument104 pagesMemoire Kouider Elouahed Chahinez Et Malaoui NihelMme TIHALPas encore d'évaluation
- Recyclage 7Document36 pagesRecyclage 7Youness El Hamri100% (2)
- Algerie RechangeDocument48 pagesAlgerie RechangeSalim MouradPas encore d'évaluation
- Corrige Examen FF 2020 TSMFMDocument10 pagesCorrige Examen FF 2020 TSMFMSou Mia67% (6)
- QGIS 2.8 UserGuide FRDocument349 pagesQGIS 2.8 UserGuide FRFaniry Anja RandrianPas encore d'évaluation
- Rapport de Sensibilisation - DéfinitifDocument51 pagesRapport de Sensibilisation - DéfinitifLova AndriamanampisoaPas encore d'évaluation
- Journees Carriere Juin 2Document15 pagesJournees Carriere Juin 2magesPas encore d'évaluation
- Plaquettes MPSI PCSI 2023Document2 pagesPlaquettes MPSI PCSI 2023spartacus.avoukarouillePas encore d'évaluation
- Expressions À Utiliser Dans Une Introduction: Trois Étapes Sont À EnvisagerDocument3 pagesExpressions À Utiliser Dans Une Introduction: Trois Étapes Sont À Envisagerhorny negroPas encore d'évaluation
- Varlogic N - 52449Document2 pagesVarlogic N - 52449valery tagne tallePas encore d'évaluation
- Contrat de Construction de NavireDocument2 pagesContrat de Construction de NavireAyoub Ben AbdAllahPas encore d'évaluation
- 14 - Imposition Des Res Des Stes IR NPCDocument6 pages14 - Imposition Des Res Des Stes IR NPCRuffin MickaelPas encore d'évaluation
- CHAPVDocument27 pagesCHAPVM LPas encore d'évaluation
- La Somme Et Le Reste No. 18Document21 pagesLa Somme Et Le Reste No. 18alfredorubiobazan5168Pas encore d'évaluation
- Protection TransformateurDocument78 pagesProtection TransformateurDjebien Ahmed Abu AbderrahimPas encore d'évaluation
- Découvrir Mahajanga en 3 JoursDocument13 pagesDécouvrir Mahajanga en 3 JoursMicha JohnsonPas encore d'évaluation