Vous aimerez peut-être aussi
- Cours ACP - Principes Et Pratique de l'ACPDocument1 pageCours ACP - Principes Et Pratique de l'ACPYassinePas encore d'évaluation
- AcpDocument72 pagesAcpzakariPas encore d'évaluation
- FR Tanagra ACP PythonDocument24 pagesFR Tanagra ACP PythonAli Yassine BelHadj RhoumaPas encore d'évaluation
- TP ACP 1Document10 pagesTP ACP 1Aziza LdmPas encore d'évaluation
- FR Tanagra AcpDocument11 pagesFR Tanagra AcpMarwane MouttaqiPas encore d'évaluation
- 10-2 - TD - Indicateurs en Maintenance - Analyse de ParetoDocument8 pages10-2 - TD - Indicateurs en Maintenance - Analyse de ParetoKacem Mohamed NaimPas encore d'évaluation
- Brosur Pompa Deepwell - APPDocument4 pagesBrosur Pompa Deepwell - APPpurchasing pratamajayaPas encore d'évaluation
- AutosDocument250 pagesAutosRELOJERIAPas encore d'évaluation
- Euro3: Châssis 8x4Document2 pagesEuro3: Châssis 8x4tarek.elhassen.transportPas encore d'évaluation
- AutosDocument242 pagesAutosChristopher Montiel RivasPas encore d'évaluation
- A - BEND SJP 2016 - 2017 SJP 5 Infotronique 02 Examen Analyse de DonneesDocument6 pagesA - BEND SJP 2016 - 2017 SJP 5 Infotronique 02 Examen Analyse de DonneesEssomme ngolong Ernest parfaitPas encore d'évaluation
- Madel LNG FR 18Document10 pagesMadel LNG FR 18chafqPas encore d'évaluation
- Autos PDFDocument244 pagesAutos PDFIgnacio Reyes MartinezPas encore d'évaluation
- Euro 6: Châssis 6x6Document3 pagesEuro 6: Châssis 6x6RubenPas encore d'évaluation
- Perfection 4990 Photo Exploded Diagram-2 PDFDocument4 pagesPerfection 4990 Photo Exploded Diagram-2 PDFmarkusPas encore d'évaluation
- Laser Swiss Kitchen 2017 V8.4_FRDocument615 pagesLaser Swiss Kitchen 2017 V8.4_FRveladzic.mirzaPas encore d'évaluation
- Hoja de Respuestas 16PFDocument1 pageHoja de Respuestas 16PFAmir Angel Berrios SanjinezPas encore d'évaluation
- Ilshin Gate Valve CatalogueDocument1 pageIlshin Gate Valve CatalogueAnonymous EKxXjqyVHPas encore d'évaluation
- AutosDocument237 pagesAutosCarlosJoaquinCardozoPas encore d'évaluation
- AutosDocument250 pagesAutosgguitaristPas encore d'évaluation
- Autos PDFDocument241 pagesAutos PDFGuSequePas encore d'évaluation
- Data Methodes FactoriellesDocument30 pagesData Methodes FactoriellesmohameedPas encore d'évaluation
- Hoja de Ajuste TRAM 1486Document1 pageHoja de Ajuste TRAM 1486Moi CanoPas encore d'évaluation
- ING 800 Optimisation Et Fiabilité Exemples 1Document4 pagesING 800 Optimisation Et Fiabilité Exemples 1touhami saidPas encore d'évaluation
- TreuilDocument2 pagesTreuilBaptiste DespresPas encore d'évaluation
- GT-225 Trimmer: Parts CatalogDocument24 pagesGT-225 Trimmer: Parts CatalogAlejandra RamirezPas encore d'évaluation
- AutosDocument243 pagesAutoseze.ajaxPas encore d'évaluation
- 09 ML 150E22H - FR ActualiséeDocument2 pages09 ML 150E22H - FR ActualiséeMourad OthmanPas encore d'évaluation
- FICHE TECHNIQUE ML180Document2 pagesFICHE TECHNIQUE ML180Mourad OthmanPas encore d'évaluation
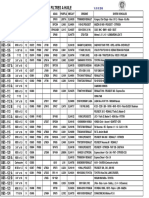
- Catalogue Alsafa FiltresDocument16 pagesCatalogue Alsafa Filtresahmed khodja karim100% (3)
- Étude de Cas 2Document5 pagesÉtude de Cas 2Walid El BourakkadiPas encore d'évaluation
- Route À Rendre FinalDocument6 pagesRoute À Rendre FinalAndry ZohajainaPas encore d'évaluation
- LTM1300-6 2Document80 pagesLTM1300-6 2Calle OlofssonPas encore d'évaluation
- Split Case Pumps Brochure FR PDFDocument8 pagesSplit Case Pumps Brochure FR PDFDedi ThamrinPas encore d'évaluation
- Autos AcpDocument1 pageAutos AcpBledPas encore d'évaluation
- Autos Acp Pour RDocument2 pagesAutos Acp Pour RLilia LinaPas encore d'évaluation
- Graficas Inf 4Document4 pagesGraficas Inf 4juanpa22051996Pas encore d'évaluation
- DL Géotechnique 2Document2 pagesDL Géotechnique 2abdelmalek karroumPas encore d'évaluation
- HTTPSWWW - Sepem Permanent - Comfichiers Produits28131362067713accouplementscompresse2 PDFDocument18 pagesHTTPSWWW - Sepem Permanent - Comfichiers Produits28131362067713accouplementscompresse2 PDFRIVALDO JUNINHO ZINEDINE ADIKPETOPas encore d'évaluation
- Fiche Élevage - ISA Brown PDFDocument2 pagesFiche Élevage - ISA Brown PDFTresorPas encore d'évaluation
- ISOSTARLINETECHNICALDATA50 HZnewDocument22 pagesISOSTARLINETECHNICALDATA50 HZnewRudy AbionPas encore d'évaluation
- Cat Nov 15 2Document17 pagesCat Nov 15 2David MengPas encore d'évaluation
- ML 180E28 Porteur 4x2: MASSES (KG.) P.T.C. P.T.R. Essieu 1 Essieu 2Document2 pagesML 180E28 Porteur 4x2: MASSES (KG.) P.T.C. P.T.R. Essieu 1 Essieu 2nasrwissem90Pas encore d'évaluation
- Exercice CapacitéDocument4 pagesExercice CapacitéWalid El BourakkadiPas encore d'évaluation
- TD Indicateurs en Maintenance Analyse de ParetoDocument4 pagesTD Indicateurs en Maintenance Analyse de Paretowa3ri babaksPas encore d'évaluation
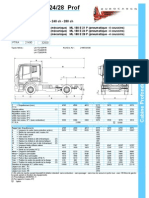
- ML 180 e 21-24-28Document4 pagesML 180 e 21-24-28fatalgamers100% (1)
- Autos PDFDocument237 pagesAutos PDFanon_32719358Pas encore d'évaluation
- Valores Venais Do IPVA 2011Document305 pagesValores Venais Do IPVA 2011denismarcello2Pas encore d'évaluation
- Scania CVF PDFDocument6 pagesScania CVF PDFAbdouPas encore d'évaluation
- Fiche Technique 12 16DZCDocument4 pagesFiche Technique 12 16DZCmohamed madiPas encore d'évaluation
- CCCCDocument4 pagesCCCCHero MeroneroPas encore d'évaluation
- KJKP "Rad" Sarajevo Spisak Mehanizacije 1/14, 04/13/2023Document14 pagesKJKP "Rad" Sarajevo Spisak Mehanizacije 1/14, 04/13/2023Kenan HasetaPas encore d'évaluation
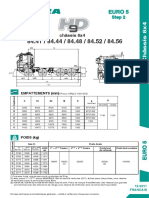
- HD9 E5-8x4-F PDFDocument4 pagesHD9 E5-8x4-F PDFJawad EnnasihiPas encore d'évaluation
- Epm 7256 eDocument9 pagesEpm 7256 edcastrelos2000Pas encore d'évaluation
- Présentation: CaractéristiquesDocument5 pagesPrésentation: CaractéristiquesSALLPas encore d'évaluation
- FinalDocument79 pagesFinalderbalijalelPas encore d'évaluation
- Super CerameDocument31 pagesSuper CerameaichaPas encore d'évaluation
- Gestion Du Projet RenaultDocument16 pagesGestion Du Projet RenaultANASPas encore d'évaluation
- Controle Vibratoire WELK PDFDocument29 pagesControle Vibratoire WELK PDFSmail BENADDIPas encore d'évaluation
- TD13Document6 pagesTD13saadoniPas encore d'évaluation
- ssp304 FDocument52 pagesssp304 FDavePas encore d'évaluation
- Rapport FinalDocument20 pagesRapport FinalLoubna ElbiadiPas encore d'évaluation
- Les Fusions Et Acquisitions Un Paradoxe Toujours InexpliquéDocument19 pagesLes Fusions Et Acquisitions Un Paradoxe Toujours Inexpliquéismail4Pas encore d'évaluation
- Mem Final21Document104 pagesMem Final21abfstbmsodPas encore d'évaluation
- Flow Doc - PDF HhyuujlmmlkklDocument4 pagesFlow Doc - PDF HhyuujlmmlkklMehdi ChakrounePas encore d'évaluation
- MSP Saadi + Kermeche-ConvertiDocument81 pagesMSP Saadi + Kermeche-ConvertiMohamed MokhtariPas encore d'évaluation
- KS FR157Document20 pagesKS FR157Brahim Brahim AchmegmegPas encore d'évaluation
- Expose Pompe de ChaleurDocument6 pagesExpose Pompe de Chaleurلبزة صالحPas encore d'évaluation
- Les DisjoncteursDocument5 pagesLes DisjoncteursMohamed EL HARZLIPas encore d'évaluation
- Landini REX4Document40 pagesLandini REX4Andrea FilottoPas encore d'évaluation
- LISTE Pieces de Rechanges.Document20 pagesLISTE Pieces de Rechanges.Rachid Smaili100% (1)
- Csec French Paper 1 - Specimen Practice Paper - Listening Comprehension-1Document9 pagesCsec French Paper 1 - Specimen Practice Paper - Listening Comprehension-1Connor EnglandPas encore d'évaluation
- Catalogue Collecteurs A BaguesDocument7 pagesCatalogue Collecteurs A BaguesEricPas encore d'évaluation
- Rir 202204241428Document2 pagesRir 202204241428Adrien MottardPas encore d'évaluation
- Fiche Technique MachinesDocument13 pagesFiche Technique MachinesScribdTranslationsPas encore d'évaluation
- Présentation - Chaudières2bisDocument112 pagesPrésentation - Chaudières2bisYounèss Bourbii67% (3)
- HSD 2 Verticale Avec Cadre Encollage BoulonneDocument1 pageHSD 2 Verticale Avec Cadre Encollage BoulonneNadia MenchafouPas encore d'évaluation
- 9 PDFDocument68 pages9 PDFberkahharianPas encore d'évaluation
- MANUEL DU PROPRIÉTAIRE - Lotus Elise 111R Et Exige 2007-2011Document178 pagesMANUEL DU PROPRIÉTAIRE - Lotus Elise 111R Et Exige 2007-2011novyPas encore d'évaluation
- 11-Changement D'arbre À CamesDocument7 pages11-Changement D'arbre À CamesKarim DahbiPas encore d'évaluation
- DR03 Transmission CDocument5 pagesDR03 Transmission CAbdellah FaqdaniPas encore d'évaluation
- Devoir+de+Controle+N1 2AS2 2021Document7 pagesDevoir+de+Controle+N1 2AS2 2021Mohamed SaifPas encore d'évaluation
- AGROPLUS F 70-75-90 Inv. Mec. - Power ShuttleDocument364 pagesAGROPLUS F 70-75-90 Inv. Mec. - Power ShuttleRijho Lopez OsorioPas encore d'évaluation
- Chargeur Embarque Vehicule Lerger Elis 200 3000 Avril 2021 - Web PDFDocument2 pagesChargeur Embarque Vehicule Lerger Elis 200 3000 Avril 2021 - Web PDFSiros notrevilagePas encore d'évaluation
- Chapitre 1Document4 pagesChapitre 1Nour el houdaPas encore d'évaluation