Académique Documents
Professionnel Documents
Culture Documents
Modélisation Et Statistique Spatiales
Transféré par
Azzedine BakaTitre original
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Modélisation Et Statistique Spatiales
Transféré par
Azzedine BakaDroits d'auteur :
Formats disponibles
MATH
EMATIQUES
&
APPLICATIONS
Directeurs de la collection :
G. Allaire et M. Benam
63
MATH
EMATIQUES & APPLICATIONS
Comit e de Lecture 20082011/Editorial Board 20082011
R EMI ABGRALL
INRIAet Math ematiques, Univ. Bordeaux 1, FR
abgrall@math.u-bordeaux.fr
GR EGOIRE ALLAIRE
CMAP,
Ecole Polytechnique, Palaiseau, FR
allaire@cmapx.polytechnique.fr
MICHEL BENAIM
Math ematiques, Univ. de Neuch atel, CH
michel.benaim@unine.ch
OLIVIER CATONI
Proba. et Mod. Al eatoires, Univ. Paris 6, FR
catoni@ccr.jussieu.fr
THIERRY COLIN
Math ematiques, Univ. Bordeaux 1, FR
colin@math.u-bordeaux1.fr
MARIE-CHRISTINE COSTA
CEDRIC, CNAM informatique, Paris, FR
costa@cnam.fr
JEAN DELLA-DORA
LMC, IMAG, Inst. Technology Grenoble, FR
jean.della-dora@imag.fr
JACQUES DEMONGEOT
TIMC, IMAG, Univ. Grenoble I, FR
jacques.demongeot@imag.fr
NICOLE EL KAROUI
CMAP,
Ecole Polytechnique, Palaiseau, FR
elkaroui@cmapx.polytechnique.fr
JOSSELIN GARNIER
Proba. et Mod. Al eatoires, Univ. Paris 6 et 7, FR
garnier@math.jussieu.fr
ST EPHANE GAUBERT
INRIA, Saclay,
Iles-de-France, Orsay et
CMAP,
Ecole Polytechnique, Palaiseau, FR
stephane.gaubert@inria.fr
CLAUDE LE BRIS
CERMICS, ENPC et INRIA
Marne la Vall ee, FR
lebris@cermics.enpc.fr
CLAUDE LOBRY
INRA, INRIA, Sophia-Antipolis et
Analyse Syst` emes et Biom etrie
Montpellier, FR
lobrinria@wanadoo.fr
LAURENT MICLO
Analyse, Topologie et Proba., Univ. Provence, FR
miclo@cmi.univ-mrs.fr
VAL ERIE PERRIER
Mod.. et Calcul, ENSIMAG, Grenoble, FR
valerie.perrier@imag.fr
BERNARD PRUM
Statist. et G enome, CNRS, INRA, Univ. Evry, FR
bernard.prum@genopole.cnrs.fr
PHILIPPE ROBERT
INRIA, Domaine de Voluceau, Rocquencourt, FR
philippe.robert@inria.fr
PIERRE ROUCHON
Automatique et Syst` emes,
Ecole Mines, Paris, FR
pierre.rouchon@ensmp.fr
ANNICK SARTENAER
Math ematiques, Univ. Namur, BE
annick.sartenaer@fundp.ac.be
ERIC SONNENDR UCKER
IRMA, Strasbourg, FR
sonnen@math.u-strasbg.fr
SYLVAIN SORIN
Combinat. et Optimisation, Univ. Paris 6, FR
sorin@math.jussieu.fr
ALAIN TROUV E
CMLA, ENS Cachan, FR
trouve@cmla.ens-cachan.fr
JEAN PHILIPPE VIAL
Management Studies, Univ. Geneva, CH
jean-philippe.vial@hec.unige.ch
C EDRIC VILLANI
UMPA, ENS Lyon, FR
cedric.villani@umpa.ens-lyon.fr
ENRIQUE ZUAZUA
Matem aticas, Univ. Aut onoma Madrid, ES
enrique.zuazua@uam.es
Directeurs de la collection :
G. ALLAIRE et M. BENAIM
Instructions aux auteurs :
Les textes ou projets peuvent etre soumis directement ` a lun des membres du comit e de lecture avec
copie ` a G. ALLAIRE OU M. BENAIM. Les manuscrits devront etre remis ` a l
Editeur
sous format L
A
T
E
X2e (cf. ftp://ftp.springer.de/pub/tex/latex/svmonot1/).
Carlo Gaetan
Xavier Guyon
Mod elisation
et statistique spatiales
ABC
Carlo Gaetan
Dipartimento di Statistica
Universit` a Ca Foscari Venezia
San Giobbe, Cannaregio 873
30121 Venice
Italy
gaetan@unive.it
Xavier Guyon
Centre Pierre Mend` es France
Universit e Paris 1 et SAMOS
90 rue de Tolbiac
75634 Paris Cedex 13
France
xavier.guyon@univ-paris1.fr
Library Congress Control Number: 2008924866
Mathematics Subject Classification (2000): 13P10, 68Q40, 14Q20, 65F15, 08-0,
14-01, 68-01
ISSN 1154-483X
ISBN-10 3-540-79225-2 Springer Berlin Heidelberg New York
ISBN-13 978-3-540-79225-3 Springer Berlin Heidelberg New York
Tous droits de traduction, de reproduction et dadaptation r eserv es pour tous pays.
La loi du 11 mars 1957 interdit les copies ou les reproductions destin ees ` a une utilisation collective.
Toute repr esentation, reproduction int egrale ou partielle faite par quelque proc ed e que ce soit, sans le consentement
de lauteur ou de ses ayants cause, est illicite et constitue une contrefacon sanctionn ee par les articles 425 et suivants
du Code p enal.
Springer est membre du Springer Science+Business Media
c Springer-Verlag Berlin Heidelberg 2008
springer.com
WMXDesign GmbH
Imprim e sur papier non acide 3100/SPi - 5 4 3 2 1 0 -
Prface
La statistique spatiale tudie des phnomnes dont lobservation est un pro-
cessus alatoire X =X
s
, s S index par un ensemble spatial S, X
s
appartenant un espace dtats E. La localisation dun site dobservation
s S est soit xe et dterministe, soit alatoire. Classiquement, S est un
sous-ensemble bidimensionnel, S R
2
. Mais S peut aussi tre unidimension-
nel (chromatographie, essai agronomique en ligne) ou encore tre un sous-
ensemble de R
3
(prospection minire, science du sol, imagerie 3-D). Dautres
domaines, ainsi la statistique baysienne ou la planication des expriences
numriques, peuvent faire appel des espaces S de dimension d 3. Notons
enn que ltude dune dynamique spatiale ajoute la dimension temporelle au
spatial, indexant par exemple lobservation par (s, t) R
2
R
+
si la dyna-
mique est bidimensionnelle.
Les mthodes danalyse spatiale connaissent un dveloppement important
du fait dune forte demande de la part de nombreux domaines dapplication
tels que lexploitation minire, les sciences de lenvironnement et de la terre,
lcologie et la biologie, la gographie, lconomie spatiale, lpidmiologie,
lagronomie et la foresterie, le traitement dimage, etc. Cette varit de la
demande fait la richesse du sujet. A titre dillustration, nous donnons ci-
dessous quelques exemples des trois types de donnes spatiales qui seront
tudies dans ce livre.
Les donnes gostatistiques
S est un sous-espace continu de R
d
, le champ X
s
, s S tant observ en
n sites xs s
1
, . . . , s
n
S et lespace dtat E tant rel. Cest le cas des
donnes pluviomtriques de la Fig. 1-a, ou encore des donnes de porosit dun
sol (cf. Fig. 1-b). Les sites dobservation peuvent tre disposs rgulirement
ou non. La gostatistique aborde, par exemple, les questions de modlisation,
didentication et de sparation des variations grande et petite chelle,
de prdiction (ou krigeage) en un site non-observ et de reconstruction de X
partout sur S.
VI Prface
0
X Coord
Y
C
o
o
r
d
50 100 150 200 250 300 350
2
5
0
2
0
0
1
5
0
1
0
0
5
0
5
0
0
(a)
colonne
l
i
g
n
e
(b)
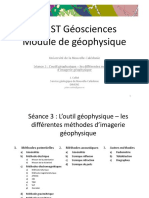
Fig. 1. (a) Cumuls pluviomtriques sur le rseau mtorologique suisse le 8 mai
1986 (passage du nuage de Chernobyl, donnes sic du package geoR du logiciel R
[178]) ; (b) Porosit dun sol (donnes soil du package geoR). Pour (a) et (b), les
dimensions des symboles sont proportionnelles la valeur Xs.
plus petit que 9
9 12.2
12.2 19
plus grand que 19
0.0
0
.
0
0
.
2
0
.
4
0
.
6
0
.
8
1
.
0
0.2 0.4 0.6 0.8 1.0
(a) (b)
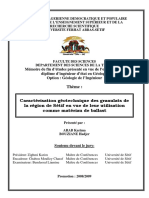
Fig. 2. (a) Pourcentage dindividus du groupe sanguin A dans les 26 comts de
lIrlande (donnes eire du package spdep) ; (b) Image de John Lennon (256 256
pixels sur 193 niveaux de gris, donnes lennon du package fields).
Les donnes latticielles ou donnes sur un rseau S x
S est un ensemble discret x non-alatoire, gnralement S R
d
, et X
est observ sur S. Les sites s peuvent reprsenter des units gographiques
dun rseau muni dun graphe de voisinage ( (cf. les 26 comts de lIrlande,
Fig. 2-a), la variable X
s
intgrant une quantit dintrt sur cette unit s. Les-
pace dtat E est rel ou non. En analyse dimage, S est un ensemble rgulier
Prface VII
de pixels (cf. Fig. 2-b). Parmi les objectifs tudis, signalons la construction
et lanalyse de modles explicatifs, ltude de la corrlation spatiale, la pr-
diction, la restauration dimage.
Les donnes ponctuelles
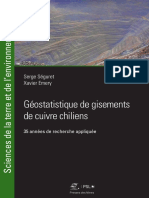
La Fig. 3-a donne la rpartition des centres de cellules dune coupe his-
tologique observe au microscope, la Fig. 3-b celle daiguilles de pin dans
une fort ainsi que leurs longueurs respectives. Ici, cest lensemble des sites
x = x
1
, x
2
, , x
n
, x
i
S R
d
o ont lieu les observations qui est alatoire
tout comme le nombre n = n(x) de sites observs : x est une ralisation dun
processus ponctuel (PP) spatial X observ dans la fentre S. Le processus X
est dit marqu si en outre on observe une marque en chaque x
i
, par exemple
la longueur de laiguille observe en x
i
. Une question centrale dans lanalyse
statistique des PP consiste savoir si la rpartition des points est plutt r-
gulire (le cas pour la Fig. 3-a) ou bien si elle est due au hasard (processus
ponctuel de Poisson) ou encore si elle prsente des agrgats (le cas pour la
Fig. 3-b).
Comme pour les sries temporelles, la statistique spatiale se direncie de
la statistique classique par le fait que les observations sont dpendantes : on
dit que X est un processus spatial ou encore que X est un champ alatoire.
Cette dpendance cre une redondance de linformation disponible qui peut
tre utilement exploite pour la prvision mais qui modie les comportements
statistiques. Labsence de biais, la consistance, lecacit ou la convergence en
loi dun estimateur devront tre vries dans ce contexte. Mais loriginalit
de la statistique spatiale est de faire appel des modlisations non-causales :
en ce sens, la statistique spatiale se distingue radicalement de la statistique des
sries temporelles qui fait appel des modlisations causales utilisant de faon
0.2
0
.
0
0
.
2
0
.
4
0
.
6
0
.
8
y
x
0.4 0.6 0.8 1.0
0
0
5
0
1
0
0
1
5
0
2
0
0
x
y
50 100 150 200
(a) (b)
Fig. 3. (a) Les 42 centres de cellules dune coupe histologique observe au micro-
scope (donnes cells du package spatstat) ; (b) Positions et tailles de 584 aiguilles
de pin dans un sous-bois (donnes longleaf du package spatstat).
VIII Prface
naturelle le droulement du temps et la notion de pass (modlisation du dbit
dune rivire, dune action en bourse, de lvolution dun taux de chmage,
etc.). Une modlisation spatiale markovienne sexprimera, elle, en terme de
voisinage spatial dun site s dans toutes les directions. Ceci vaut aussi pour
la dimension d = 1 : si par exemple, pour S Z
1
, X
s
est le rendement dun
pied de mas dans une culture en ligne, un modle raisonnable comparera
X
s
ses deux voisins, le pied de mas gauche X
s1
et le pied de mas
droite X
s+1
, l o un modle autorgressif causal de X
s
en X
s1
na
pas dinterprtation naturelle ; si la culture est en champ, on pourrait faire
dpendre le rendement X
s,t
au site (s, t) des rendements aux 4 plus proches
voisins, X
s1,t
, X
s+1,t
, X
s,t1
et X
s,t+1
, voire des rendements aux 8 plus
proches voisins.
Les trois types de structures spatiales [cf. Cressie 48] structurent lorga-
nisation du livre. Les trois premiers chapitres sont consacrs la modlisa-
tion de chaque type de donnes (chapitre 1 : Modles du second ordre et
gostatistique, modles intrinsques, modles AR; chapitre 2 : Champs de
Gibbs-Markov sur un rseau ; chapitre 3 : Processus ponctuels spatiaux). Vu
limportance des techniques de simulation en statistique spatiale, le chapitre
4 prsente les principales mthodes de simulation spatiale par chane de Mar-
kov (mthodes MCMC pour Monte Carlo Markov Chain). Enn, le chapitre 5
rassemble les principales mthodes statistiques utilises pour les dirents mo-
dles et types de donnes et en dcrit les proprits. Quatre appendices com-
pltent le livre, prsentant les principaux outils probabilistes et statistiques
utiles la statistique spatiale (simulation, thormes limites, estimation par
minimum de contraste) ainsi que les logiciels utiliss dans les illustrations.
De nombreux exemples, le plus souvent traits avec le logiciel R [178],
illustrent les sujets abords. Lorsquelles ne sont pas directement disponibles
dans R ou dans un site spci, les donnes tudies, leurs descriptions, les
scripts des programmes utiliss ainsi que des liens utiles sont gurs dans
le site
www.dst.unive.it/gaetan/ModStatSpat
attach au livre. Chaque chapitre se termine par des exercices.
La bibliographie permettra au lecteur dapprofondir certaines notions pr-
sentes succintement ainsi que certains rsultats techniques dont nous ne don-
nons pas la dmonstration. On y trouvera galement des livres de rfrence
compltant une prsentation que nous avons voulu volontairement rduite et
sans souci dexhaustivit dans un domaine aux multiples facettes et en plein
dveloppement [69].
Nos remerciements vont tous les collgues qui nous ont donn le got de
lanalyse spatiale, pour leurs ides, leurs remarques, leurs contributions et qui
nous ont permis dutiliser les donnes issues de leur travail. Notre reconnais-
sance va galement au R Development Core Team et aux auteurs des packages
spatiaux du logiciel R [178] qui mettent librement la disposition du public
des outils logiciels performants et ecaces, complments indispensables aux
Prface IX
mthodes et outils exposs ici. Nous remercions les rapporteurs pour leur lec-
ture approfondie du premier projet ; leurs remarques ont permis damliorer
signicativement la version actuelle. Merci Bernard Ycart pour ses encou-
ragements dpasser un projet initial beaucoup plus modeste. Bien entendu,
cela naurait pas pu se faire sans la patience et lattention de nos familles et
lappui de nos quipes de recherche respectives, savoir le Dipartimento di
Statistica lUniversit Ca Foscari - Venezia et le SAMOS Paris 1.
Venise et Paris Carlo Gaetan
mars 2008 Xavier Guyon
Table des matires
1 Modle spatial du second ordre et gostatistique. . . . . . . . . . . 1
1.1 Rappels sur les processus stochastiques . . . . . . . . . . . . . . . . . . . . . 2
1.2 Processus stationnaire. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2.1 Dnitions, exemples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.2.2 Reprsentation spectrale dune covariance . . . . . . . . . . . . 6
1.3 Processus intrinsque et variogramme . . . . . . . . . . . . . . . . . . . . . . 8
1.3.1 Dnition, exemples et proprits. . . . . . . . . . . . . . . . . . . . 8
1.3.2 Variogramme dun processus stationnaire . . . . . . . . . . . . . 10
1.3.3 Exemples de covariances et de variogrammes . . . . . . . . . . 11
1.3.4 Anisotropies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.4 Proprits gomtriques : continuit, direntiabilit . . . . . . . . . 16
1.4.1 Continuit et direntiabilit : le cas stationnaire . . . . . . 17
1.5 Modlisation spatiale par convolution . . . . . . . . . . . . . . . . . . . . . . 19
1.5.1 Modle continu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
1.5.2 Convolution discrte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
1.6 Modles spatio-temporels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
1.7 Les modles auto-rgressifs spatiaux . . . . . . . . . . . . . . . . . . . . . . . 25
1.7.1 Modles MA, ARMA stationnaires . . . . . . . . . . . . . . . . . . 26
1.7.2 Auto-rgression simultane stationnaire . . . . . . . . . . . . . . 28
1.7.3 Auto-rgression conditionnelle stationnaire . . . . . . . . . . . 31
1.7.4 AR non-stationnaire sur un rseau ni S . . . . . . . . . . . . . 34
1.7.5 Modles auto-rgressifs avec covariables : SARX . . . . . . 38
1.8 Le modle de rgression spatiale . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
1.9 Prdiction covariance connue . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
1.9.1 Le krigeage simple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
1.9.2 Krigeage universel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
1.9.3 Expriences numriques . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
XII Table des matires
2 Champ de Gibbs-Markov sur rseau . . . . . . . . . . . . . . . . . . . . . . . 55
2.1 Recollement de lois conditionnelles . . . . . . . . . . . . . . . . . . . . . . . . . 56
2.2 Champ de Gibbs sur S . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
2.2.1 Potentiel dinteraction et spcication de Gibbs . . . . . . . 57
2.2.2 Exemples de spcication de Gibbs . . . . . . . . . . . . . . . . . . 59
2.3 Champ de Markov et champ de Gibbs . . . . . . . . . . . . . . . . . . . . . . 66
2.3.1 Dnitions : cliques, champ de Markov . . . . . . . . . . . . . . . 67
2.3.2 Le thorme de Hammersley-Cliord . . . . . . . . . . . . . . . . . 67
2.4 Les auto-modles markoviens de Besag (AMM) . . . . . . . . . . . . . . 69
2.4.1 Recollement de lois conditionnelles et auto-modle . . . . . 69
2.4.2 Exemples dauto-modles markoviens . . . . . . . . . . . . . . . . 70
2.5 Dynamique dun champ de Markov . . . . . . . . . . . . . . . . . . . . . . . . 76
2.5.1 Chane de Markov de champ de Markov (CMCM) . . . . . 76
2.5.2 Exemples de dynamiques . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
3 Processus ponctuels spatiaux . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
3.1 Dnitions et notations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
3.1.1 Espace exponentiel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
3.1.2 Moments dun processus ponctuel . . . . . . . . . . . . . . . . . . . 87
3.1.3 Exemples de processus ponctuels . . . . . . . . . . . . . . . . . . . . 89
3.2 Processus ponctuel de Poisson . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
3.3 Processus ponctuel de Cox . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
3.3.1 Processus de Cox log-Gaussien . . . . . . . . . . . . . . . . . . . . . . 93
3.3.2 PP doublement poissonnien. . . . . . . . . . . . . . . . . . . . . . . . . 94
3.4 Densit dun processus ponctuel . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
3.4.1 Dnition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
3.4.2 Processus ponctuel de Gibbs . . . . . . . . . . . . . . . . . . . . . . . . 96
3.5 Distances au plus proche voisin dun PP. . . . . . . . . . . . . . . . . . . . 100
3.5.1 Les mesures de Palm. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
3.5.2 Deux distances au ppv de X . . . . . . . . . . . . . . . . . . . . . . . . 101
3.5.3 Moment rduit dordre 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
3.6 Processus ponctuel de Markov . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
3.6.1 Proprit de Markov au sens de Ripley-Kelly. . . . . . . . . . 104
3.6.2 Proprit de Markov aux ppv . . . . . . . . . . . . . . . . . . . . . . . 106
3.6.3 PP de Gibbs sur lespace R
d
. . . . . . . . . . . . . . . . . . . . . . . . 109
Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
4 Simulation des modles spatiaux . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
4.1 Convergence dune chane de Markov . . . . . . . . . . . . . . . . . . . . . . 115
4.1.1 Loi des grands nombres et TCL pour une chane
homogne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
4.2 Deux algorithmes markoviens de simulation . . . . . . . . . . . . . . . . . 120
4.2.1 Echantillonneur de Gibbs sur un espace produit . . . . . . . 121
4.2.2 Lalgorithme de Metropolis-Hastings (MH) . . . . . . . . . . . 123
Table des matires XIII
4.3 Simulation dun champ de Markov sur un rseau . . . . . . . . . . . . 126
4.3.1 Les deux algorithmes de base . . . . . . . . . . . . . . . . . . . . . . . 126
4.3.2 Exemples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
4.3.3 Simulation sous contrainte . . . . . . . . . . . . . . . . . . . . . . . . . . 130
4.3.4 Simulation dune dynamique de champ de Markov . . . . . 131
4.4 Simulation dun processus ponctuel . . . . . . . . . . . . . . . . . . . . . . . . 132
4.4.1 Simulation conditionnelle un nombre x de points . . . 132
4.4.2 Simulation inconditionnelle . . . . . . . . . . . . . . . . . . . . . . . . . 132
4.4.3 Simulation de PP de Cox . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
4.5 Performance et contrle des mthodes MCMC . . . . . . . . . . . . . . 134
4.5.1 Performances dune mthode MCMC . . . . . . . . . . . . . . . . 134
4.5.2 Deux mthodes de contrle de la convergence . . . . . . . . . 135
4.6 Simulation exacte depuis le pass . . . . . . . . . . . . . . . . . . . . . . . . . . 138
4.6.1 Lalgorithme de Propp et Wilson . . . . . . . . . . . . . . . . . . . . 138
4.6.2 Deux amnagements de lalgorithme . . . . . . . . . . . . . . . . . 140
4.7 Simulation dun champ gaussien sur S R
d
. . . . . . . . . . . . . . . . 142
4.7.1 Simulation dun champ gaussien stationnaire . . . . . . . . . . 142
4.7.2 Simulation gaussienne conditionnelle . . . . . . . . . . . . . . . . . 146
Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146
5 Statistique des modles spatiaux. . . . . . . . . . . . . . . . . . . . . . . . . . . 153
5.1 Estimation en gostatistique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154
5.1.1 Analyse du nuage variographique . . . . . . . . . . . . . . . . . . . . 154
5.1.2 Estimation empirique dun variogramme. . . . . . . . . . . . . . 156
5.1.3 Estimation paramtrique dun modle de variogramme . 158
5.1.4 Estimation du variogramme en prsence
dune tendance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 160
5.1.5 Validation dun modle de variogramme . . . . . . . . . . . . . . 163
5.2 Autocorrlation sur un rseau spatial . . . . . . . . . . . . . . . . . . . . . . 170
5.2.1 Lindice de Moran . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171
5.2.2 Test asymptotique dindpendance spatiale . . . . . . . . . . . 172
5.2.3 Lindice de Geary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 174
5.2.4 Test de permutation dindpendance spatiale . . . . . . . . . . 174
5.3 Statistique des champs du second ordre . . . . . . . . . . . . . . . . . . . . 178
5.3.1 Estimation dun modle stationnaire sur Z
d
. . . . . . . . . . . 178
5.3.2 Estimation dun modle auto-rgressif . . . . . . . . . . . . . . . . 181
5.3.3 Estimation du maximum de vraisemblance. . . . . . . . . . . . 183
5.3.4 Estimation dune rgression spatiale . . . . . . . . . . . . . . . . . 184
5.4 Estimation dun champ de Markov. . . . . . . . . . . . . . . . . . . . . . . . . 193
5.4.1 Le maximum de vraisemblance . . . . . . . . . . . . . . . . . . . . . . 193
5.4.2 Pseudo-vraisemblance conditionnelle de Besag. . . . . . . . . 196
5.4.3 La mthode de codage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203
5.4.4 Prcisions compares du MV , MPV C et du codage . . . 206
5.4.5 Identication du support dun champ de Markov . . . . . . 207
XIV Table des matires
5.5 Statistique pour un processus ponctuel spatial . . . . . . . . . . . . . . 212
5.5.1 Test dhomognit spatiale bas sur les quadrats . . . . . . 212
5.5.2 Estimation de lintensit dun PP. . . . . . . . . . . . . . . . . . . . 213
5.5.3 Estimation des caractristiques du second ordre . . . . . . . 215
5.5.4 Estimation dun modle parametrique de PP. . . . . . . . . . 223
5.5.5 Pseudo-vraisemblance conditionnelle dun PP . . . . . . . . . 225
5.5.6 Approximation Monte Carlo dune vraisemblance
de Gibbs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 228
5.5.7 Rsidus dun processus ponctuel . . . . . . . . . . . . . . . . . . . . . 231
5.6 Modle hirarchique spatial et statistique baysienne . . . . . . . . . 235
5.6.1 Rgression spatiale et krigeage baysien . . . . . . . . . . . . . . 236
5.6.2 Modle linaire gnralis hirarchique spatial . . . . . . . . . 238
Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 244
Appendices
A Simulation de variables alatoires . . . . . . . . . . . . . . . . . . . . . . . . . . 255
A.1 La mthode dinversion. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 255
A.2 Simulation dune chane de Markov nombre ni dtat . . . . . . 257
A.3 La mthode de rejet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 257
A.4 Simulation dune loi gaussienne . . . . . . . . . . . . . . . . . . . . . . . . . . . 258
B Thormes limites pour un champ alatoire . . . . . . . . . . . . . . . . 261
B.1 Ergodicit et lois des grands nombres . . . . . . . . . . . . . . . . . . . . . . 261
B.1.1 Ergodicit et thorme ergodique . . . . . . . . . . . . . . . . . . . . 261
B.1.2 Exemples de processus ergodiques . . . . . . . . . . . . . . . . . . . 262
B.1.3 Ergodicit et LGN faible dans L
2
. . . . . . . . . . . . . . . . . . . . 263
B.1.4 LFGN sous conditions L
2
. . . . . . . . . . . . . . . . . . . . . . . . . . 264
B.2 Coecient de mlange fort . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 264
B.3 TCL pour un champ mlangeant . . . . . . . . . . . . . . . . . . . . . . . . . . 266
B.4 TCL pour une fonctionnelle dun champ de Markov . . . . . . . . . . 267
C Estimation par minimum de contraste . . . . . . . . . . . . . . . . . . . . . 269
C.1 Dnitions et exemples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 270
C.2 Proprits asymptotiques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 275
C.2.1 Convergence de lestimateur . . . . . . . . . . . . . . . . . . . . . . . . 276
C.2.2 Normalit asymptotique . . . . . . . . . . . . . . . . . . . . . . . . . . . . 277
C.3 Identication dun modle par contraste pnalis . . . . . . . . . . . . 281
C.4 Preuve de deux rsultats du Chapitre 5 . . . . . . . . . . . . . . . . . . . . 282
C.4.1 Variance de lestimateur du MV dune rgression
gaussienne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 282
C.4.2 Consistance du MV pour un champ de Markov
stationnaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 283
D Logiciels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 285
Littrature . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 289
Index . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 303
Notations et abrviations
c--d cest--dire
c.d.n. conditionnellement dnie ngative
Ch. chapitre
d.p. dnie positive
d.s. densit spectrale
Ex. Exercice
Fig. Figure
i.e. par exemple
i.i.d. indpendantes et identiquement distribues
i.n.i.d. indpendantes et non-identiquement distribues
m.q. moyenne quadratique
ssi si et seulement si
p.p.v. plus proches voisins
resp. respectivement
s.d.p. semi-dnie positive
t.q. tel que
v.a. variable alatoire
AMM Auto-Modle Markovien
AMMX Auto-Modle Markovien eXogne
AR Auto-Rgression
ARMA Auto-Rgression avec Moyenne Mobile
BB Bruit Blanc
BBf Bruit Blanc faible
BBF Bruit Blanc Fort
XVI Notations et abrviations
BBG Bruit Blanc Gaussien
CAR Auto-Rgression Conditionnelle
CFTP Coupling From The Past
CSP Complete Spatial Randomness
EQNM Ecart Quadratique Normalis Moyen
LFGN Loi Forte des Grands Nombres
MA Moyenne Mobile (Moving Average)
MAP Maximum a Posteriori
MCMC Monte Carlo Markov Chain
MCG Moindres Carrs Gnraliss
MCQG Moindres Carrs Quasi Gnraliss
MCO Moindres Carrs Ordinaires
MCP Moindres Carrs Pondrs
MH Metropolis-Hastings
MLG Modle Linaire Gnralis
MV Maximum de Vraisemblance
SAR Auto-Rgression Simultane
SARX SAR avec eXognes
PP Processus Ponctuel
PPM Processus Ponctuel Marqu
PPP Processus Ponctuel de Poisson
PVC Pseudo-Vraisemblance Conditionnelle
TCL Thorme Central Limite
B(S), (resp. B
b
(S)) Borliens (resp. borns) de S, S R
d
(A) Cardinalit de (A)
(A) Diamtre de A : (A) = sup
x,yA
d(x, y)
[[ Dterminant de
d(A) Diamtre intrieur de A : d(A) = supr : x t.q.
B(x; r) A
1A Fonction indicatrice de A
A (i) Frontire de voisinage de A (du site i)
.
= K(, ) galit dnissant K(, )
i, j) i et j sont voisins
Mesure de Lebesgue sur R
d
|| ou ||
2
Norme euclidienne sur R
p
: |x| =
p
1
x
2
i
||
1
Norme l
1
: |x|
1
=
p
1
[x
i
[
Notations et abrviations XVII
||
Norme du sup : |x|
= sup
i
[x
i
[
||
V T
Norme en variation totale
est absolument continue par rapport
[x] Partie entire de x
M
(B) (resp.
m
(C)) Plus grande (resp. petite) valeur propre de B
A B Produit de Kronecker des matrices A et B
t
uv Produit scalaire sur R
p
:
t
uv =
p
i=1
u
i
v
i
t
C Transpose de C
X ^(0, 1) X est de loi ^(0, 1)
1
Modle spatial du second ordre et gostatistique
Soit S R
d
un ensemble spatial. Un champ X sur S valeur dans lespace
dtat E est la donne dune collection X = X
s
, s S de variables alatoires
(v.a.) indexes par S et valeurs dans E. Ce chapitre est consacr ltude des
champs du second ordre, cest--dire des champs valeurs relles, les variances
des X
s
tant nies. On tudiera galement la classe plus large des champs
intrinsques qui sont accroissements de variances nies. Deux approches
seront considres.
Dans lapproche gostatistique, S est un sous-ensemble continu de R
d
et
on modlise X au second ordre par sa fonction de covariance ou par son
variogramme. Par exemple, pour d = 2, s = (x, y) S est repr par ses
coordonnes gographiques et si d = 3, on ajoute laltitude (ou la profondeur)
z. Une volution spatio-temporelle dans lespace peut aussi tre modlise par
des sites espace-temps (s, t) R
3
R
+
, s reprant lespace et t le temps.
Dveloppe initialement pour la prvision des rserves minires dune zone
dexploration S R
3
, la gostatistique est aujourdhui utilise dans des do-
maines varis (cf. Chils et Delner [43] ; Diggle et Ribeiro [63]). Citons entre
autres : les sciences de la terre et la prospection minire [134; 152], lenvi-
ronnement [142], lpidmiologie, lagronomie, la planication des expriences
numriques [193]. Un objectif central de la gostatistique est de dresser des
cartes de prvision de X par krigeage sur tout S partir dun nombre ni
dobservations.
La deuxime approche utilise des modles dauto-rgression (AR). Elle
sapplique lorsque S est un rseau discret de sites (on dira aussi un lattice) :
S peut tre rgulier, par exemple S Z
d
(imagerie, donnes satellitaires,
radiographie ; [42; 224]) ou non (conomtrie, pidmiologie ; [45; 7; 105]). Ici,
la structure de la corrlation (du variogramme) spatiale dcoulera du modle
AR retenu. Ces modles sont bien adapts lorsque les mesures sont agrges
par units spatiales : par exemple, le pourcentage dune catgorie dans une
unit administrative en conomtrie, le nombre de cas dune maladie dans un
canton s en pidmiologie, la production intgre sur toute une parcelle s en
agronomie.
2 1 Modle spatial du second ordre et gostatistique
1.1 Rappels sur les processus stochastiques
Soit (, T, P) un espace de probabilit, S un ensemble de sites et (E, c) un
espace dtat mesurable.
Dnition 1.1. Processus stochastique
Un processus stochastique (ou processus, ou champ alatoire) valeur dans
E est une famille X = X
s
, s S de v.a. dnies sur (, T, P) et valeur
dans (E, c). (E, c) sappelle lespace dtat du processus et S lensemble (spa-
tial) des sites sur lequel est dni le processus.
Pour tout entier n 1 et tout n-uplet (s
1
, s
2
, . . . , s
n
) S
n
, la loi de
(X
s1
, X
s2
, . . . , X
sn
) est limage de la probabilit P par lapplication
(X
s1
(), X
s2
(), . . . , X
sn
()) : savoir pour A
i
c, i = 1, . . . , n,
P
X
(A
1
, A
2
, . . . , A
n
) = P(X
s1
A
1
, X
s2
A
2
, . . . , X
sn
A
n
).
Lvnement (X
s1
A
1
, X
s2
A
2
, . . . , X
sn
A
n
) de c est un cylindre associ
au n-uplet (s
1
, s
2
, . . . , s
n
) et aux vnements A
i
, i = 1, n, de T. La famille de
toutes les distributions nies-dimensionnelles de X sappelle la loi spatiale
du processus ; si S R, on parle de loi temporelle. Plus gnralement, la
loi du processus est dnie de faon unique comme le prolongement de la loi
spatiale la sous-tribu / T engendre par lensemble des cylindres de c
[32, Ch. 12 ; 180, Ch. 6].
Dans toute la suite de ce chapitre, les processus considrs seront valeurs
relles, E R tant muni de sa tribu borlienne, c = B(E).
Dnition 1.2. Processus du second ordre
X est un processus (un champ) du second ordre si, pour tout s S,
E(X
2
s
) < . La moyenne de X qui existe alors est la fonction m : S R
dnie par m(s) = E(X
s
). La covariance de X est la fonction c : S S R
dnie, pour tout s, t, par c(s, t) = Cov(X
s
, X
t
).
Si L
2
= L
2
(, T, P) reprsente lensemble des variables alatoires sur
(, T) valeurs relles et de carr intgrable, on notera X L
2
le fait que X
est un processus du second ordre. Le processus X est dit centr si, pour tout
s, m(s) = 0.
La proprit caractristique dune covariance est dtre semi-dnie posi-
tive (s.d.p.):
m 1, a R
m
et (s
1
, s
2
, . . . , s
m
) S
m
:
m
i=1
m
j=1
a
i
a
j
c(s
i
, s
j
) 0.
Cette proprit rsulte de la positivit de la variance de toute combinaison
linaire :
V ar
_
m
i=1
a
i
X
si
_
=
m
i=1
m
j=1
a
i
a
j
c(s
i
, s
j
) 0.
1.2 Processus stationnaire 3
On dira que la covariance est dnie positive (d.p.) si de plus, pour tout
m-uplet de sites distincts,
m
i=1
m
j=1
a
i
a
j
c(s
i
, s
j
) > 0 ds que a ,= 0.
Les processus gaussiens constituent une sous-classe importante des pro-
cessus de L
2
.
Dnition 1.3. Processus gaussien
X est un processus gaussien sur S si, pour toute partie nie S et
toute suite relle a = (a
s
, s ),
s
a
s
X
s
est une variable gaussienne.
Si m
= E(X
) est la moyenne de X
= (X
s
, s ) et
sa cova-
riance, alors, si
est inversible, X
admet pour densit (on dit aussi pour
vraisemblance) par rapport la mesure de Lebesgue sur R
:
f
(x
) = (2)
/2
(det
)
1/2
exp
_
1/2
t
(x
)
1
(x
)
_
,
o U est le cardinal de U et x
la ralisation de X
. Ces densits sont
cohrentes et le thorme de Kolmogorov assure alors que pour toute fonction
moyenne m et pour toute covariance c d.p., il existe un champ (gaussien) de
moyenne m de covariance c.
Exemple 1.1. Mouvement brownien sur R
+
, drap brownien sur (R
+
)
2
X est un mouvement brownien [180] sur S = R
+
si X
0
= 0, si pour
tout s > 0, X
s
est de loi ^(0, s) (not X
s
^(0, s)) et si les accroissements
X(]s, t]) = X
t
X
s
, t > s 0 sont indpendants pour des intervalles disjoints.
La covariance du mouvement brownien vaut c(s, t) = mins, t et le processus
des accroissements X
t
= X
t+
X
t
, t 0 est stationnaire (cf. Ch. 1.2) de
loi marginale ^(0, ).
Cette dnition stend au drap brownien [37] sur le quart de plan S =
(R
+
)
2
avec : X
u,v
= 0 si uv = 0, X
u,v
^(0, uv) pour tout (u, v) S et
lindpendance des accroissements sur des rectangles disjoints, lacroissement
sur le rectangle ]s, t], s = (s
1
, s
2
), t = (t
1
, t
2
), s
1
< t
1
, s
2
< t
2
, tant,
X(]s, t]) = X
t1,t2
X
t1s2
X
s1t2
+X
s1s2
.
Un drap brownien est un processus gaussien centr de covariance c(s, t) =
mins
1
, s
2
mint
1
, t
2
.
1.2 Processus stationnaire
Dans ce paragraphe, on supposera que X est un champ du second ordre de
moyenne m et de covariance c sur S = R
d
ou Z
d
. La notion de stationnarit
de X peut tre dnie plus gnralement ds que S est un sous-groupe additif
de R
d
: par exemple S est le lattice triangulaire de R
2
, S = ne
1
+ me
2
, n
et m Z o e
1
= (1, 0) et e
2
= (1/2,
3/2) ; ou encore S est le tore ni
d-dimensionnel p
d
points, S = (Z/pZ)
d
.
4 1 Modle spatial du second ordre et gostatistique
1.2.1 Dnitions, exemples
Dnition 1.4. Champ stationnaire au second ordre
X est un champ stationnaire au second ordre sur S si la moyenne de X
est constante et si la covariance c de X est invariante par translation :
s, t S : E(X
s
) = m et c(s, t) = Cov(X
s
, X
t
) = C(t s).
C : S R est la fonction de covariance stationnaire de X. Linvariance par
translation de c se traduit par :
s, t, h S : c(s +h, t +h) = Cov(X
s+h
, X
t+h
) = C(s t).
La fonction de corrlation de X est la fonction h (h) = C(h)/C(0). On a
les proprits suivantes :
Proposition 1.1. Soit X un processus stationnaire au second ordre de cova-
riance stationnaire C. Alors :
1. h S, [C(h)[ C(0) = V ar(X
s
).
2. m 1, a R
m
et t
1
, t
2
, . . . , t
m
S :
m
i=1
m
j=1
a
i
a
j
C(t
i
t
j
) 0.
3. Si A : R
d
R
d
est linaire, le champ X
A
= X
As
, s S est station-
naire de covariance C
A
(s) = C(As). C
A
est d.p. si C lest et si A est de
rang plein.
4. Si C est continue lorigine, alors C est uniformment continue partout.
5. Si C
1
, C
2
, . . . sont des covariances stationnaires, les fonctions suivantes
le sont aussi :
(a) C(h) = a
1
C
1
(h) +a
2
C
2
(h) si a
1
et a
2
0 ;
(b) Plus gnralement, si C(; u), u U R
k
est une covariance sta-
tionnaire pour chaque u et si est une mesure positive sur R
k
t.q.
C
(h) =
_
U
C(h; u)(du) existe pour tout h, alors C
est une cova-
riance stationnaire.
(c) C(h) = C
1
(h)C
2
(h) ;
(d) C(h) = lim
n
C
n
(h) ds que la limite existe pour tout h.
Preuve. Sans restreindre la gnralit, on peut supposer que X est centr.
(1) est une consquence de lingalit de Cauchy-Schwarz :
C(h)
2
= E(X
h
X
0
)
2
E(X
2
0
)E(X
2
h
) = E(X
2
0
)
2
;
(2) dcoule du fait quune covariance est s.d.p. et (3) se vrie directement.
(4) rsulte de lidentit C(s +h) C(s) = E[X
0
(X
s+h
X
s
] et de lingalit
de Cauchy-Schwarz,
[C(s +h) C(s)[
_
C(0)
_
2[C(0) C(h)].
1.2 Processus stationnaire 5
(5) On vrie facilement que les fonctions C dnies par (a), (b) et (d) sont
s.d.p.. Dautre part, si X
1
et X
2
sont stationnaires indpendants de cova-
riances C
1
et C
2
, la covariance C donne par (3-a) (resp. (3-b)) est la celle de
X
t
=
a
1
X
1,t
+
a
2
X
2,t
(resp. X
t
= X
1t
X
2t
). .
Deux notions encadrent la notion de stationnarit dans L
2
. Lune, plus faible
et qui sera prsente au paragraphe suivant, est celle de processus accrois-
sements stationnaires, ou processus intrinsque. Lautre, plus forte, est la sta-
tionnarit stricte : on dira que X est strictement stationnaire si pour tout
entier k N, tout k-uplets (t
1
, t
2
, . . . , t
k
) S
k
et tout h S, la loi de (X
t1+h
,
X
t2+h
, . . . , X
t
k
+h
) ne dpend pas de h; en quelque sorte, X est stationnaire
au sens strict si la loi spatiale du processus est invariante par translation.
Si X est stationnaire au sens strict et si X L
2
, alors X est stationnaire
dans L
2
. Linverse nest pas vrai en gnral mais les deux notions concident
si X est un processus gaussien.
Exemple 1.2. Bruit Blanc Fort (BBF), Bruit Blanc faible (BBf)
X est un Bruit Blanc Fort si les variables X
s
, s S sont centres,
indpendantes et identiquement distribues (i.i.d.). X est un Bruit Blanc faible
si les variables X
s
, s S sont centres, dcorrles et de variances nies
constantes : si s ,= t, Cov(X
s
, X
t
) = 0 et V ar(X
s
) =
2
< . Un BBF sur S
est strictement stationnaire ; un BBf sur S est un processus stationnaire dans
L
2
.
Nous noterons || la norme euclidienne sur R
d
: |x| = |x|
2
=
_
d
i=1
x
2
i
si x = (x
1
, x
2
, . . . , x
d
).
Dnition 1.5. Covariance isotropique
La covariance de X est isotropique si pour tout s, t S, Cov(X
s
, X
t
) ne
dpend que de |s t| :
C
0
: R
+
R t.q. : t, s S, c(s, t) = C
0
(|s t|) = C(s t).
Une covariance isotropique est donc stationnaire mais lisotropie impose des
restrictions sur la covariance. Par exemple, si X est centr isotropique sur R
d
et si on considre d + 1 points distances mutuelles |h|,
E
d+1
i=1
X
si
2
= (d + 1)C
0
(|h|)(1 +d
0
(|h|) 0.
o
0
: R
+
[1, 1] est la fonction de corrlation isotrope. Ainsi, pour tout
h, la corrlation vrie,
0
(|h|) 1/d. (1.1)
6 1 Modle spatial du second ordre et gostatistique
1.2.2 Reprsentation spectrale dune covariance
La thorie de Fourier et le thorme de Bochner [29; 43] mettent en bijection
une covariance stationnaire C sur S et sa mesure spectrale F : il est donc
quivalent de caractriser un modle stationnaire de L
2
par sa covariance
stationnaire C ou par sa mesure spectrale F.
Le cas S = R
d
On associe C une mesure F 0 symtrique et borne sur les borliens
B(R
d
) telle que :
C(h) =
_
R
d
e
i
t
hu
F(du). (1.2)
o
t
hu =
d
i=1
h
i
u
i
. Si C est intgrable, F admet une densit f par rapport
la mesure de Lebesgue de R
d
: f sappele la densit spectrale (d.s.) de X.
La transforme de Fourier inverse permet alors dexprimer f en terme de C
f(u) = (2)
d
_
R
d
e
i
t
hu
c(h)dh.
Si X est de covariance isotropique C, sa d.s. f lest aussi et rciproquement.
Notons r = |h|, h = (r, ) o = h|h|
1
S
d
repre lorientation de
h dans la sphre unitaire S
d
de R
d
centre en 0, = |u| et u = (, )
o = u |u|
1
S
d
. Pour h = (r, ) et u = (, ) les reprsentations
polaires de h et de u, on note c
d
(r) = C(h) et f
d
() = f(u) les covariances et
densits spectrales isotropiques rduites. Intgrant (1.2) sur S
d
pour la mesure
de surface d, puis en [0, [, on obtient :
C(h) = c
d
(r) =
_
[0,[
__
S
d
cos(r
t
)d()
_
d1
f
d
()d
=
_
[0,[
d
(r)
d1
f
d
()d. (1.3)
La transformation de Hankel f
d
c
d
, lanalogue de la transforme de Fourier
en situation disotropie, montre que la varit des covariances isotropiques est
la mme que celle des mesures positives et bornes sur [0, [. De plus [227],
d
(v) = (d/2)(/2)
(d2)/2
(d2)/2
(v) o
est la fonction de Bessel de
premire espce dordre [2]. Pour n = 1, 2 et 3, on a :
c
1
(r) = 2
_
[0,[
cos(r)f
1
()d,
c
2
(r) = 2
_
[0,[
J
0
(r)f
2
()d,
c
3
(r) =
2
r
_
[0,[
sin(r)f
3
()d.
1.2 Processus stationnaire 7
Considrant (1.3), on obtient les minorations :
C(h) inf
v0
d
(v)
_
]0,[
d1
f
d
()d = inf
v0
d
(v) C(0).
On obtient en particulier les minorations [227; 184], plus nes que celles
donnes en (1.1) :
0
(|h|) 0.403 sur R
2
,
0
(|h|) 0.218 sur R
3
,
0
(|h|) 0.113 sur R
4
et
0
(|h|) 0 sur R
N
.
Exemple 1.3. Covariance exponentielle sur R
d
Pour t R, C
0
(t) = b exp([t[), , b > 0, a pour transforme de Fourier,
f(u) =
1
2
_
],[
be
]t]iut
dt =
b
(
2
+ u
2
)
.
Puisque f 0 est intgrable sur R, cest une d.s. et C
0
est bien une covariance
sur R. Dautre part, lidentit,
_
]0,[
e
x
(ux)x
+1
dx =
2(2u)
( + 3/2)
1/2
(
2
+u
2
)
+3/2
,
montre que
(u) =
b[(d + 1)/2]
[(
2
+u
2
)]
(d+1)/2
est une d.s. isotropique dun processus sur R
d
de covariance :
C(h) = C
0
(|h|) = b exp(|h|).
Pour toute dimension d, C est donc une fonction de covariance, dite exponen-
tielle, de paramtres b, la variance de X et a =
1
la porte de C.
Le cas S = Z
d
Notons T
d
= [0, 2[
d
, le tore de dimension d. A toute covariance stationnaire
C sur Z
d
, le thorme de Bochner associe une mesure F 0 et borne sur les
borliens B(T
d
) telle que :
C(h) =
_
T
d
e
i
t
uh
F(du).
Si C est de carr sommable (
hZ
d
C(h)
2
< ), la mesure spectrale F admet
une densit f dans L
2
(T
d
) :
f(u) = (2)
d
hZ
d
C(h)e
i
t
uh
. (1.4)
De plus, si
hZ
d
[C(h)[ < , la convergence est uniforme et f est continue.
Dautre part, plus la direntiabilit de f est grande, plus la convergence de
8 1 Modle spatial du second ordre et gostatistique
C vers 0 linni est rapide et rciproquement : par exemple, si f (
k
(T
d
)
pour un multi-indice k = (k
1
, . . . , k
d
) N
d
,
lim sup
h
h
k
[C(h)[ < ,
o h = (h
1
, h
2
, . . . , h
d
) signie quau moins une coordonne h
i
et h
k
= h
k1
1
. . . h
k
d
.
d
. En particulier, si f est indniment drivable, C 0
plus vite que toute fonction puissance ; tel est le cas des modles ARMA (cf.
1.7.1) qui ont une d.s. f rationnelle.
1.3 Processus intrinsque et variogramme
1.3.1 Dnition, exemples et proprits
La proprit de stationnarit dans L
2
peut ne pas tre satisfaite pour diverses
raisons : par exemple si X
s
= Y
s
+Z o Y est stationnaire de L
2
mais Z / L
2
;
ou encore si X est dans L
2
mais nest pas stationnaire, soit au second ordre (le
mouvement brownien), soit au premier ordre (X
s
= a+bs+
s
pour un rsidu
centr stationnaire). Une faon daaiblir lhypothse de stationnarit L
2
est
de considrer le processus des accroissements X
(h)
s
= X
s+h
X
s
, s S
de X, ces accroissements pouvant tre stationnaires dans L
2
sans que X soit
stationnaire ou que X soit dans L
2
.
Dnition 1.6. Processus intrinsque
X est un processus intrinsquement stationnaire, ou encore X est un pro-
cessus intrinsque, si, pour tout h S, le processus X
(h)
= X
(h)
s
=
X
s+h
X
s
: s S est stationnaire au second ordre. Le semi-variogramme
de X est la fonction : S R dnie par :
2(h) = V ar(X
s+h
X
s
).
Tout processus stationnaire de L
2
de covariance C est clairement un pro-
cessus intrinsque de variogramme 2(h) = 2(C(0) C(h)). Mais la rci-
proque est fausse : le mouvement brownien sur R, de variogramme [h[, est
intrinsque mais pas stationnaire. De mme, un processus de moyenne ane
et de rsidu stationnaire est intrinsque, la direntiation ayant pour eet
(comme pour un srie temporelle) dabsorber les tendances anes et donc de
stationnariser le processus au premier ordre. Si la direntiation avait lieu
lordre k, les tendances polynomiales de degr k seraient limines, un pro-
cessus X tant dit k-intrinsque si
k
X
(h)
est stationnaire (cf. [43] ; sur Z,
ces modles ARIMA gnralisent les ARMA). Si on examine le drap brow-
nien sur (R
+
)
2
, il nest pas intrinsque puisquil est facile de vrier que
V ar(X
(u,v)+(1,1)
X
(u,v)
) = u +v + 1 dpend de h = (u, v).
Si X est un processus intrinsque et si la fonction m(h) = E(X
s+h
X
s
)
est continue en 0, alors m() est linaire : a R
d
t.q. m(h) = a, h). En eet
1.3 Processus intrinsque et variogramme 9
m est additive, m(h) + m(h
t
) = E(X
s+h+h
X
s+h
) + (X
s+h
X
s
) =
m(h +h
t
) et la continuit en 0 de m implique la linarit.
Nous nous limiterons par la suite aux processus intrinsques acroisse-
ments centrs : h, m(h) = 0
Proposition 1.2. Proprits du variogramme
1. (h) = (h), (h) 0 et (0) = 0.
2. Un variogramme est conditionnellement dni ngatif (c.d.n.) : a R
n
t.q.
n
i=1
a
i
= 0, s
1
, . . . , s
n
S, alors :
n
i=1
n
j=1
a
i
a
j
(s
i
s
j
) 0.
3. Si A est une transformation linaire sur R
d
, h (Ah) est un vario-
gramme si est un variogramme.
4. Les proprits 5-(a,b,d) dune covariance (cf. Prop. 1.1) se maintiennent
pour un variogramme.
5. Si est continue en 0, alors est continue en tout site s o est locale-
ment born.
6. Si est born au voisinage de 0, a et b 0 tels que, pour tout x :
(x) a|x|
2
+b.
Preuve. (1) est immdiat. Vrions (2) : posant Y
s
= (X
s
X
0
), Y est sta-
tionnaire dans L
2
, de covariance C
Y
(s, t) = (s) + (t) (s t). Dautre
part, si
n
i=1
a
i
= 0, alors
n
i=1
a
i
X
si
=
n
i=1
a
i
Y
si
et
V ar
_
n
i=1
a
i
X
si
_
=
n
i=1
n
j=1
a
i
a
j
C
Y
(s
i
, s
j
) =
n
i=1
n
j=1
a
i
a
j
(s
i
s
j
) 0.
(3) Si X est un processus intrinsque de variogramme 2, alors Y = Y
s
=
X
As
est intrinsque de variogramme :
2
Y
(h) = V ar(X
A(s+h)
X
As
) = 2(Ah).
(5) 2(s + h) (s) = E(A) o A = (X
s+h
X
0
)
2
(X
s
X
0
)
2
.
On vrie facilement que A = B + C o B = (X
s+h
X
s
)(X
s+h
X
0
)
et C = (X
s+h
X
s
)(X
s
X
0
). Appliquant lingalit de Cauchy-Schwarz
chacun des produits B et C, le rsultat annonc rsulte de la majoration :
[(s +h) (s)[
_
(h)[
_
(s) +
_
(s +h)].
De plus, est uniformment continu sur toute partie o est born.
(6) Montrons par rcurrence que, pour tout n N et h R
d
, (nh)
n
2
(h). La proprit est vrie pour n = 1 ; dautre part, puisque
10 1 Modle spatial du second ordre et gostatistique
2((n + 1)h) = E(X
s+(n+1)h
X
s+h
) + (X
s+h
X
s
)
2
.
lingalit de Cauchy-Schwarz donne :
((n+1)h) (nh)+(h)+2
_
(nh)(h) (h)n
2
+1+2n = (n+1)
2
(h).
Soit alors > 0 tel que sup
|u|
(u) = C < et x R
d
tel que n |x|
(n + 1), n 1. Posant x = |x|
1
, la dcomposition x = n x + dnit un
vriant || ; on vrie alors que :
(x) = (n x +) (n x) +() + 2
_
(n x)()
Cn
2
+C + 2Cn = C(n + 1)
2
C
_
|x|
+ 1
_
2
.
.
A la dirence dune covariance, un variogramme nest pas ncessairement
born (par exemple le variogramme (h) = [h[ du mouvement brownien). Mais
la proposition prcdente indique quun variogramme crot linni au plus
comme |h|
2
. Un tel exemple de croissance quadratique (t) =
2
1
t
2
correspond
celle du variogramme de X
t
= Z
0
+tZ
1
, t R, o Z
0
et Z
1
sont centres et
indpendantes, V ar(Z
1
) =
2
1
> 0.
Il existe des caractrisations assurant quune fonction est un vario-
gramme, lune tant la suivante [43] : si est continu et si (0) = 0, alors
est un variogramme si et seulement si, pour tout u > 0, t expu(t) est
une covariance. Par exemple, t expu |t|
2
tant une covariance sur R
d
pour tout u > 0 et toute dimension d, (t) = |t|
2
est un variogramme sur R
d
croissance quadratique linni.
1.3.2 Variogramme dun processus stationnaire
Si X est stationnaire de covariance C, alors X est intrinsque de variogramme
2(h) = 2(C(0) C(h)). (1.5)
En particulier, le variogramme dun processus stationnaire est born. Mathe-
ron [153] a montr une rciproque partielle, savoir que si le variogramme dun
processus intrinsque X est born, alors X
t
= Z
t
+ Y o Z est un processus
stationnaire de L
2
et Y une v.a. relle gnrale.
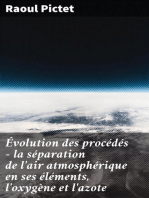
Si C(h) 0 lorsque |h| , (h) C(0) si |h| : le variogramme
prsente alors un palier au niveau C(0) = V ar(X) si |h| . La porte
du variogramme (resp. la porte pratique) est la distance partir de laquelle le
variogramme atteint son palier (resp. 95% de la valeur du palier), cf. Fig. 1.1.
Les mthodes statistiques pour les processus stationnaires du second ordre
peuvent tre traduites en terme de covariance ou en terme de variogramme. Le
premier choix a la faveur des statisticiens et le deuxime des gostatisticiens.
Signalons quun avantage du variogramme est que son estimation ne ncessite
pas lestimation pralable de la moyenne, contrairement lestimation dune
covariance (cf. 5.1.4).
1.3 Processus intrinsque et variogramme 11
0.0
0
.
0
0
.
5
1
.
0
1
.
5
2
.
0
2
.
5
3
.
0
3
.
5
h
(
h
)
Ppite
Porte
Palier
0.5 1.0 1.5 2.0 2.5 3.0
0.0
0
.
0
0
.
2
0
.
4
0
.
6
0
.
8
1
.
0
h
(
h
)
exponentiel
sphrique
gaussien
0.2 0.4 0.6 0.8 1.0
(a) (b)
Fig. 1.1. (a) Semi-variogramme dun modle stationnaire avec composante ppi-
tique ; (b) modles de variogrammes de mme porte.
1.3.3 Exemples de covariances et de variogrammes
Variogrammes isotropiques
Les exemples suivants sont des variogrammes isotropiques sur R
d
classique-
ment utiliss en gostatistique. Dautres modles sont dcrits dans Yaglom
[227], Chils et Delner [43], Wackernagel [221] et dans larticle de revue
Schlather [195].
Les cinq premiers variogrammes, associs une covariance stationnaire
C(h) = C(0) (h), sont borns, avec comme paramtre de porte a > 0 et
de niveau de palier
2
. Rappelons que || est la norme euclidienne sur R
d
.
Ppitique : (h;
2
) =
2
si h > 0, (0) = 0, associ un BBf.
Exponentiel : (h; a,
2
) =
2
1 exp(|h|/a).
Sphrique (d 3) :
(h; a,
2
) =
_
2
_
1.5|h|/a 0.5(|h|/a)
3
_
si |h| a,
2
si |h| > a
.
Exponentiel gnralis, gaussien : (h; a,
2
, ) =
2
(1 exp((|h|/a)
) si
0 < 2 ; = 2 est le modle gaussien.
Matrn :
(h; a,
2
, ) =
2
1
2
1
()
(|h| /a)
(|h| /a),
o /
() est la fonction de Bessel modie de deuxime espce de para-
mtre > 1 [2; 227; 200].
Puissance : (h; b, c) = b|h|
c
, 0 < c 2.
12 1 Modle spatial du second ordre et gostatistique
Le variogramme prsent la Fig. 1.1-a peut sinterprter comme celui du
processus Y
s
= X
s
+
s
o est un bruit blanc de L
2
(eet de ppite
lorigine) non corrl X dont le variogramme est continu et prsente un
palier :
2
Y
(h) = 2
2
(1
0
(h)) + 2
X
(h),
a
tant la fonction de Dirac en a.
Commentaires
1. Linterprtation de la covariance sphrique est la suivante : le volume
V (a, r) de lintersection de deux sphres de R
3
de mme diamtre a et de
centres distants de r est,
V (a, r) =
_
(S
a
)
_
1 1.5(r/a) + 0.5(r/a)
3
_
si r a,
0 si r > a
.
(S
a
) tant le volume de la sphre de rayon a. Un processus ralisant la co-
variance sphrique est le processus X
s
= N(S
a
(s)) comptant le nombre de
points dun processus ponctuel de Poisson homogne dintensit
2
/(S
a
)
dans la sphre S
a
(s) de diamtre a et centre en s R
3
(cf. Ch. 3, 3.2).
2. La covariance circulaire C
circ
sur R
2
est obtenue de faon analogue en
remplaant la sphre de R
3
par le disque de R
2
:
C
circ
(h; a,
2
) =
2
2
_
arccos
|h|
a
|h|
a
_
1
_
|h|
a
_
2
_
si |h| a
0 sinon
.
(1.6)
Quant la covariance triangulaire C
tri
sur R
1
, elle sobtient en remplaant
la sphre de R
3
par lintervalle [a, +a] de R
1
:
C
tri
(h; a,
2
) =
_
2
_
1
]h]
a
_
si [h[ a
0 sinon
.
Les covariances sphriques, circulaires et triangulaires sont reprsentes
la Fig. 1.2.
3. Une covariance sur R
d
restant s.d.p. sur tout sous-espace vectoriel, la
restriction dune covariance tout sous-espace est encore une covariance.
En particulier, la restriction de la covariance sphrique R
d
, d
t
3, est
encore une covariance. Par contre, lextension dune covariance isotropique
de R
d
R
d
pour d
t
> d nest pas en gnral une covariance : lexercice
1.5 explicite cela pour la covariance triangulaire (1.6).
4. Lintrt de la covariance de Matrn rside dans son paramtre qui
contrle la rgularit du variogramme en 0 (cf. Fig. 1.3), rgularit qui
elle-mme contrle la rgularit en moyenne quadratique (m.q.) du champ
X (cf. 1.4) et de sa prdiction
X par krigeage (cf. 1.9) plus est grand,
plus est rgulire en 0 et plus le champ X (la surface de krigeage
X) est
rgulier. La valeur = 1/2 redonne le variogramme exponentiel, continu
1.3 Processus intrinsque et variogramme 13
0.0 0.2 0.4 0.6 0.8 1.0
0
.
0
0
.
2
0
.
4
0
.
6
0
.
8
1
.
0
h
C
(
h
)
triangulaire
sphrique
circulaire
Fig. 1.2. Graphe des covariances triangulaire, sphrique et circulaire avec
2
= 1
et a = 0.8.
0.0
0
.
0
0
.
2
0
.
4
0
.
6
0
.
8
1
.
0
h
(
h
)
=0.5 et a=0.25
=1 et a=0.188
=2 et a=0.14
=3 et a=0.117
0.2 0.4 0.6 0.8 1.0
Fig. 1.3. Semi-variogrammes de Matrn de mme porte pour direntes valeurs .
mais non drivable en 0, le champ X associ tant continu mais non d-
rivable en m.q. ; = correspond au variogramme gaussien indni-
ment drivable associ un champ X indniment drivable ; si m 1
est entier et si > m, la covariance est 2m-fois drivable en 0 et X
est m fois drivable en m.q.. Par exemple, pour = 3/2 et r = |h|,
C(h) = C(r) =
2
(1 + (r/a)) exp (r/a) est deux fois drivable en r = 0
et le champ associ est drivable en m.q..
5. Le modle de variogramme puissance est autosimilaire , c--d invariant par
changement dchelle : s > 0, (sh) = s
(h). Il est donc naturellement
associ un phnomne spatial sans chelle et cest le seul, parmi les
modles prsents, qui ait cette proprit.
6. Le modle exponentiel gnralis concide avec le modle exponentiel pour
= 1 et dnit le modle gaussien pour = 2. La rgularit du vario-
gramme en 0 augmente avec , mais le champ associ nest drivable en
moyenne quadratique que pour = 2.
14 1 Modle spatial du second ordre et gostatistique
7. Chacun des modles prcdents peut tre tendu par combinaison linaire
positive (ou intgration par une mesure positive), en particulier en ajou-
tant tout variogramme un variogramme eet de ppite.
Si X est la somme de K processus intrinsques (resp. stationnaires de L
2
)
non-corrls, il admet le variogramme (resp. la covariance) gigogne
2(h) =
K
j=1
2
j
(h) (resp. C(h) =
K
j=1
C
j
(h)).
On peut interprter ce modle comme tant associ des composantes
spatiales indpendantes agissant des chelles direntes avec des paliers
dirents. Statistiquement, une composante petite chelle ne pourra tre
identie que si la maille dchantillonnage est assez ne (donnes haute
dnition) et une composante grande chelle que si le diamtre du domaine
chantillonn dans S est assez grand.
1.3.4 Anisotropies
Si
e est une direction de R
d
, |
e | = 1, le variogramme directionnel dun
champ intrinsque dans la direction
e est dni par
2(h) = V ar(X
s+h
e
X
s
) pour h R.
Il y a anisotropie du variogramme si deux variogrammes directionnels au
moins dirent.
On distingue essentiellement deux types danisotropie : le premier, lani-
sotropie gomtrique, est associ une dformation linaire dun modle iso-
tropique ; le deuxime correspond une stratication du variogramme sur
plusieurs sous-espaces de R
d
[43; 77; 194].
Anisotropie gomtrique
Un variogramme sur R
d
prsente une anisotropie gomtrique sil rsulte
dune dformation A-linaire dun variogramme isotropique
0
:
(h) =
0
(|Ah|)
soit encore (h) =
0
(
_
t
hQh) o Q =
t
AA. Un tel variogramme garde
les mmes niveaux de palier dans toutes les directions (cf. Fig. 1.4-a) mais
les portes dirent selon les directions. En se plaant dans la base propre
orthonorme des vecteurs propres de Q associs aux valeurs propres (
k
, k =
1, . . . , d), (
h) =
0
(
d
k=1
h
k
) pour les nouvelles coordonnes
h.
Par exemple, si A est la rotation autour de lorigine de R
2
dangle suivie
de lhomotthie de rapport 0 e 1 sur le nouvel axe des y, les portes d-
crivent une ellipse dexcentricit e dans la nouvelle base. La Fig. 1.4-a illustre
1.3 Processus intrinsque et variogramme 15
2
1
0
1
2
1 0 1 2 2
1
0
1
2
1 0 1 2
(a) (b)
Fig. 1.4. (a) Anisotropie gomtrique et (b) anisotropie zonale.
cette anisotropie gomtrique dans R
2
si
0
est un modle exponentiel de pa-
ramtres a = 0.5 et
2
= 1 et la dformation A est de paramtres = 45
0
et
e = 0.7.
Signalons que Sampson et Guttorp [192] proposent le modle non
stationnaire
V ar(X
s
X
s
) = 2
0
(g(s) g(s
t
)),
o g est une dformation bijective (ou anamorphose) g de lespace S (pour
des exemples de dformations g, cf. [170; 171]).
Anisotropie stratie
On parle danisotropie de support si le variogramme h (h), aprs un ven-
tuel changement de coordonnes, ne dpend que de certaines coordonnes de
h : par exemple, si R
d
= E
1
E
2
o dim(E
1
) = d
1
et si
0
est un variogramme
isotropique sur R
d1
, (h) =
0
(h
1
) si h = h
1
+h
2
, h
1
E
1
, h
2
E
2
; le palier
(ventuellement la porte) de dpendra alors de la direction (cf. Fig. 1.4-b).
On parle danisotropie zonale ou danisotropie stratie si est la somme de
direntes composantes prsentant des anisotropies de support. Par exemple,
(h) =
1
(
_
h
2
1
+h
2
2
) +
2
([h
2
[)
prsente un palier de niveau
2
1
+
2
2
dans la direction (0, 1) et un palier de
niveau
2
1
dans la direction (1, 0) si
2
i
sont les paliers de
i
, i = 1, 2.
Chils et Delner [43] conseillent dviter lutilisation de modles spa-
rables tels (h) =
1
(h
1
) +
1
(h
2
) dans R
2
ou (h) =
1
(h
1
, h
2
) +
2
(h
3
)
dans R
3
pour lesquels certaines combinations linaires de X peuvent tre
de variance nulle : par exemple si X
s
= X
1
x
+ X
2
y
, avec Cov(X
1
x
, X
2
y
) = 0,
s =
t
(x, y) alors (h) =
1
(h
1
) +
1
(h
2
) et pour h
x
=
t
(d
x
, 0), h
y
=
t
(0, d
y
),
X
s
X
s+hx
X
s+hy
+X
s+hx+hy
0.
16 1 Modle spatial du second ordre et gostatistique
Plus gnralement, une anisotropie sobtiendra en combinant dirents
types danisotropies. La Fig. 1.4-b donne un tel exemple avec
1
le modle
exponentiel danisotropie gomtrique de paramtres a
1
= 0.5 et
2
1
= 0.7,
= 45
0
, e = 0.7 et
2
un autre modle exponentiel de paramtres a
2
= 0.05,
2
2
= 0.3.
1.4 Proprits gomtriques : continuit, direntiabilit
On munit lensemble des processus de L
2
de la notion de convergence en
moyenne quadratique suivante :
Dnition 1.7. Continuit en moyenne quadratique (m.q.)
Un processus du second ordre X = X
s
, s S sur S R
d
est continu en
moyenne quadratique en s S si, pour toute suite s
n
s convergente dans
S, E(X
sn
X
s
)
2
0.
La proposition suivante caractrise la continuit en m.q. de X.
Proposition 1.3. Soit X un processus de L
2
centr de covariance C(s, t) =
Cov(X
s
, X
t
). Alors X est continu en m.q. partout ssi sa covariance est conti-
nue sur la diagonale de S S.
Preuve. Si C(s, t) est continue en s = t = s
0
, alors E(X
s0+h
X
s0
)
2
0 si
h 0. En eet :
E(X
s0+h
X
s0
)
2
= C(s
0
+h, s
0
+h) 2C(s
0
+h, s
0
) +C(s
0
, s
0
).
Pour voir que la condition est ncessaire, on crit :
= C(s
0
+h, s
0
+k) C(s
0
, s
0
) = e
1
+ e
2
+e
3
,
avec e
1
= E[(X
s0+h
X
s0
)(X
s0+k
X
s0
)], e
2
= E[(X
s0+h
X
s0
)X
s0
] et
e
3
= E[X
s0
(X
s0+k
X
s0
)]. Si X est continu en m.q., alors e
1
, e
2
et e
3
0
si h et k 0 et C est continue sur la diagonale. .
La continuit presque sre (p.s.) dune trajectoire est un rsultat dune
autre nature plus dicile obtenir. On a par exemple le rsultat suivant [3] :
si X est un processus gaussien centr de covariance continue, la continuit
trajectorielle p.s. sur S R
d
est assure si,
c < et > 0 t.q. s, t S E(X
s
X
t
)
2
c [log |s t|[
(1+)
.
Si X est un processus gaussien intrinsque, cette continuit est assure ds
que (h) c [log |h|[
(1+)
au voisinage de lorigine. Hormis le modle eet
de ppite, tous les variogrammes prsents au 1.3.3 vrient cette proprit
et les modles (gaussiens) associs sont donc trajectoires p.s. continues.
Examinons la direntiabilit dans L
2
dans une direction donne, ou, de
faon quivalente, la direntiabilit dun processus dans R
1
.
1.4 Proprits gomtriques : continuit, direntiabilit 17
Dnition 1.8. Direntiabilit en m.q.
Un processus X sur S R
1
est direntiable en m.q. en s sil existe une
v.a.r.
X
s
telle que
lim
h0
X
s+h
X
s
h
=
X
s
dans L
2
.
Il faut noter que les trajectoires dun processus X peuvent tre chacune
trs rgulires sans que X soit direntiable en m.q. (cf. Ex. 1.11).
Proposition 1.4. Soit X un processus de L
2
centr de covariance (non n-
cessairement stationnaire) C(s, t) = Cov(X
s
, X
t
). Si
2
st
C(s, t) existe et est
nie sur la diagonale de S S, alors X est direntiable en m.q. partout, la
drive seconde croise
2
st
C(s, t) existe partout et la covariance du proces-
sus driv vaut Cov(
X
s
,
X
t
) =
2
st
C(s, t).
Preuve. Posons Y
s
(h) = (X
s+h
X
s
)/h. Pour montrer lexistence de
X
s
,
on utilise le critre de Love [145, p. 135] qui dit que Z
h
Z dans L
2
ssi
E(Z
h
Z
k
) c < lorsque h et k 0 indpendamment. Posons
s,t
(h, k) =
E (Y
s
(h)Y
t
(k)). On vrie facilement que :
s,t
(h, k) = h
1
k
1
C(s+h, t+k)C(s+h, t)C(s, t+k)+C(s, t). (1.7)
Donc, si
2
st
C(s, t) existe et est continue en (s, s),
lim
h0
lim
k0
E (Y
s
(h)Y
s
(k)) =
2
st
C(s, s).
Le critre de Love assure alors la convergence de (Y
s
(h)) lorsque h 0 vers
une limite note
X
s
, et le processus
X =
X
s
, s S est dans L
2
. Notons
C
la covariance de
X : utilisant (1.7), C
(s, t) est la limite de
s,t
(h, k) pour
h, k 0 et donc
2
st
C(s, t) = C
(s, t) existe partout. .
1.4.1 Continuit et direntiabilit : le cas stationnaire
Continuit
On dduit facilement des rsultats prcdents quun processus intrinsque
(resp. stationnaire de L
2
) est continu en m.q. si son variogramme (sa cova-
riance C) est continu en h = 0 ; dans ce cas le variogramme (la covariance
C) est continu sur tout ensemble o est born (est continue partout ; cf.
Prop. 1.2). Matrn [154] montre plus prcisment que si un champ admet un
variogramme continu partout sauf lorigine, alors ce champ est la somme de
deux champs non-corrls, lun associ un eet de ppite pure, lautre de
variogramme continu partout.
18 1 Modle spatial du second ordre et gostatistique
Direntiabilit
t X
t
est direntiable en m.q. sur R si la drive seconde
(0) du va-
riogramme existe. Dans ce cas, la drive seconde
tt
existe partout et
X est
stationnaire de covariance
tt
, le processus bivari (X,
X) L
2
vriant [227] :
E(
X
s+
X
s
) =
t
() et E(X
s
X
s+
) =
t
().
En particulier, puisque
t
(0) = 0, X
s
et
X
s
sont non-corrls pour tout s,
indpendants si X est gaussien. Notons par ailleurs que si X est stationnaire,
on a, posant C(s, t) = c(s t), C
tt
s,t
(s, t) = c
tt
(s t) et si c
tt
(0) existe,
X est
stationnaire de covariance c
tt
.
Si m 1 est un entier, on dira que X est direntiable en m.q. lordre m
si X
(m1)
existe en m.q. et si X
(m1)
est direntiable en m.q. Supposons que
X soit stationnaire, de covariance C ; alors X est direntiable lordre m si
C
(2m)
(0) existe et est nie. Dans ce cas, X
(m)
est stationnaire, de covariance
t (1)
m
C
(2m)
(t). Par exemple, le processus de Matrn est direntiable en
m.q. lordre m ds que > m [200].
Si est indniment drivable lorigine, X est indniment drivable
en m.q. : dans ce cas, X
t
= lim
L
2
n
k=0
t
k
X
(k)
0
/k! [200] : X est purement
dterministe puisquil sut de connatre X dans un (petit) voisinage de 0
pour connatre X partout. Ceci peut conduire carter un modle de vario-
gramme inniment drivable (i.e. le variogramme gaussien) si on doute de ce
dterminisme et/ou de lhyper-rgularit de X.
Exemple 1.4. Rgularits en m.q. pour un champ sur R
2
La Fig. 1.5 donne une ide de la rgularit dun champ pour trois va-
riogrammes dirents. Les simulations ont t ralises laide du package
RandomFields (cf. 4.7).
Fig. 1.5. Trois ralisations gaussiennes pour dirents variogrammes : (a) ppitique,
(b) exponentiel isotropique, (c) gaussien isotropique.
1.5 Modlisation spatiale par convolution 19
(a) X est un BBG, de variogramme ppitique discontinu en 0 : X nest pas
continu en m.q., les trajectoires sont trs irrgulires.
(b) est exponentiel isotropique, linaire lorigine : (h) = a + b |h| +
o(|h|), continue mais non drivable en 0 ; X est continu en m.q. mais non
drivable.
(c) est un variogramme gaussien isotropique, de classe (
2
(et mme (
)
lorigine : les trajectoires sont continues et drivables en m.q.. On ob-
tiendrait la mme rgularit pour tout variogramme de comportement
a +b |h|
lorigine avec 2.
Exemple 1.5. Covariance sparable composantes cubiques
Les covariances sparables C(h) =
d
k=1
C
k
(h
k
) o h = (h
1
, h
2
, . . . , h
d
)
R
d
sont utilises pour la simplicit de leur manipulation pour le krigeage (cf.
1.9), en particulier en planication des expriences numriques. Elles per-
mettent galement de vrier simplement les direntiabilits directionnelles
des champs associs. La covariance sparable composantes cubiques [132] est
associe des corrlations sur [0, 1] du type suivant : pour , et h [0, 1],
C(h) = 1
3(1 )
2 +
h
2
+
(1 )(1 )
2 +
h
3
. (1.8)
C est d.p. si (5
2
+ 8 1)(
2
+ 4 + 7)
1
[158]. Dans ce cas, le proces-
sus X de covariance C est direntiable en m.q., sa drive
X admettant la
covariance ane sur [0, 1] :
C
X
(h) = C
tt
(h) =
2
1 (1 )h,
o
2
= 6(1 )/(2 + ). Les paramtres = Cor(X
0
, X
1
) = C(1) et =
Cor(
X
0
,
X
1
) = C
X
(1)/C
X
(0) sinterprtent comme la corrlation entre les
observations terminales et la corrlation entre leurs drives.
1.5 Modlisation spatiale par convolution
1.5.1 Modle continu
Une faon naturelle de construire un modle (gaussien) X = (X
s
, s S) sur
une partie S de R
d
est de considrer la convolution,
X
s
=
_
R
d
k(u, s)W(du), (1.9)
o / = u k(u, s), s S est une famille de noyaux rels non alatoires sur
R
d
et W est un champ (gaussien) latent centr accroissements orthogonaux
sur R
d
, c--d vriant, pour
a
la fonction de Dirac en a,
20 1 Modle spatial du second ordre et gostatistique
E(W(du)W(dv)) =
u
(v)du dv.
Un choix classique pour W est le mouvement brownien si d = 1 (la convolution
est alors une intgrale de Wiener) et le drap brownien si d = 2 (cf. Exemple
1.1, [37] et Ex. 1.14). La convolution (1.9) est bien dnie dans L
2
ds que,
pour tout s S, k(, s) est de carr intgrable [227, pp. 6769]. X
s
est alors
un processus centr, de covariance :
C(s, t) = Cov(X
s
, X
t
) =
_
S
k(u, s)k(u, t)du.
Ce modle est caractris au second ordre soit par la famille de noyaux k,
soit par sa covariance C, X tant gaussien si W lest. Si S = R
d
et si la
famille de noyaux k est invariante par translation, k(u, s) = k(us), vriant
_
k
2
(u)du < , alors X est stationnaire de covariance
C(h) = Cov(X
s
, X
s+h
) =
_
S
k(u)k(u h)du.
Si k est isotropique, X lest aussi et la correspondance entre C et k est bijec-
tive. Des exemples de correspondances C k sont [219; 43, p. 646] :
C gaussienne, d 1, a > 0 :
k(u) = expa |u|
2
C(h) =
2
_
2a
_
d/2
exp
_
a
2
|h|
2
_
;
C exponentielle, d = 3, a > 0 :
k(u) = 2a
1/2
_
1
|u|
a
_
exp
_
|h|
a
_
C(h) =
2
exp
_
|h|
a
_
;
C sphrique, d = 3, a > 0 :
k(u)=c1
_
|u|
a
2
_
C(h)=V
d
_
a
2
_
_
1
3
2
_
_
_
_
h
a
_
_
_
_
+
1
2
_
_
_
_
h
a
_
_
_
_
3
_
1|h|<a.
La correspondance nest plus bijective si X est stationnaire non-
isotropique, plusieurs noyaux k pouvant conduire la mme covariance r.
Dcrivons quelques avantages que permet une reprsentation de X par
convolution [112] :
1. La formule (1.9) permet de couvrir tous les modles au second ordre sans
avoir vrier la condition de dnie positivit dune covariance [219].
2. (1.9) permet de gnrer des modles non gaussiens ds que la convolution
est valide. Par exemple, si W est un processus de Poisson (cf. 3.2) (resp.
un processus Gamma [225]) dont les accroissements sont indpendants, la
convolution permet de modliser un champ X valeurs dans N (resp.
valeurs dans R
+
).
1.5 Modlisation spatiale par convolution 21
3. En considrant une famille de noyaux k non-stationnaires mais change-
ment lent, on peut proposer des formes paramtres de non-stationnarit
de X (cf. [113] pour la modlisation de donnes environnementales.)
4. Si on fait dpendre du temps t le processus latent W, la convolution
permet de construire des modles spatio-temporels, le noyau k pouvant
dpendre ou non du temps. Par exemple, un modle de dpendance dans
le temps avec noyau constant en t est X
s
(t) =
_
S
k(u, s)W(du, t).
5. Si on observe un phnomne multivari X R
p
dont le germe est un
mme processus latent W, la convolution multivarie permet de construire
des composantes spatialement corrles en prenant dans (1.9) un noyau
k R
p
. Par exemple, si S
0
S
1
S
2
est une partition de S [112],
X
1,s
=
_
S0S1
k
1
(u s)W(du) et X
2,s
=
_
S0S2
k
2
(u s)W(du).
1.5.2 Convolution discrte
Dans la pratique, on doit utiliser des convolutions discrtes de W en m
sites | = u
1
, u
2
, . . . , u
m
de S : | est un support de convolution per-
mettant dapprocher raisonnablement lintgrale spatiale (1.9). Notant w =
t
(w
1
, w
2
, . . . , w
n
) o w
i
= w(u
i
), i = 1, . . . , m, le modle scrit,
X
w
s
= (K w)
s
=
m
i=1
k(u
i
, s)w
i
, s S, (1.10)
o w est un BB de variance
2
w
. Un tel modle dpend donc du choix de
support |, mais lindice spatial s reste continu. Si cette criture peut tre
interprte comme une moyenne mobile (un MA, cf. 1.7.1 ), elle sen distingue
car ici il ny a pas de notion de proximit entre s et les sites de | (1.10)
sinterprtant comme une approximation du modle continu (1.9).
Si on dispose de n observations X =
t
(X
s1
, X
s2
, . . . , X
sn
) de X en O =
s
1
, s
2
, . . . , s
n
, un modle incorporant des variables exognes z R
p
et un
BB de lecture scrira, site par site,
X
s
=
t
z
s
+X
w
s
+
s
, s O, R
p
. (1.11)
Son criture matricielle est :
X = Z +Kw +,
o K = (K
l,i
), K
l,i
= k(u
i
, s
l
), l = 1, . . . , n et i = 1, . . . , m. Les paramtres du
modle sont |, k() et (,
2
w
,
2
). Utilisant la terminologie statistique, il sagit
l dun modle linaire eet alatoire, w tant lorigine de leet alatoire
Kw, la tendance dterministe tant modlise partir des covariables z.
Un choix possible pour | est le rseau rgulier triangulaire de maille :
doit raliser un compromis entre dun ct un bon ajustement aux donnes
22 1 Modle spatial du second ordre et gostatistique
(maille petite) et de lautre des calculs simples (maille plus grande). Une
solution intermdiare consiste utiliser un modle multirsolution 2 mailles
ou plus. Par exemple, un modle deux rsolutions mailles triangulaires
et /2 scrit, pour sa composante alatoire,
X
w
= X
1w
+X
2w
,
o X
1w
(resp. X
2w
) est la composante (1.10) associ au -maillage et un
noyau k
1
(resp. au /2-maillage et un noyau k
2
).
Dans ce contexte, une formulation bayesienne (cf. par exemple [143]) est
intressante car elle incorpore lincertitude concernant les paramtres qui
contrlent la convolution.
Les convolutions discrtes permettent galement de construire des modles
non-stationnaires, non-gaussiens, multivaris ainsi que des modles spatio-
temporels [208; 112]. Par exemple, Higdon [112] modlise la composante ala-
toire de lvolution temporelle de concentration dozone sur T = 30 jours
conscutifs dans une rgion des Etats-Unis par
X
w
s
(t) =
k(u
i
s)w
i
(t), s S, t = 1, . . . , T ,
les w
i
(t), t = 1, . . . , T tant m marches alatoires gaussiennes indpendantes
sur un support spatial | 27 sites.
1.6 Modles spatio-temporels
Nous prsentons ici quelques modles gostatistiques spatio-temporels, sujet
qui connat un dveloppement important avec des applications en particulier
en climatologie et en science de lenvironnement [136; 133; 142; 91]. Kaiser et
Cressie [126] et Brown et al. [36] prsentent des modles drivs dune quation
direntielle stochastique et une approche temps discret est traite dans
[148; 223; 208; 112]. Quant Storvik et al. [202], ils comparent lapproche
temps discret et temps continu.
Soit X = X
s,t
, s S R
d
et t R
+
un processus rel, s reprant
lespace et t le temps. X est stationnaire au second ordre (resp. isotropique) si :
Cov(X
s1,t1
, X
s2,t2
) = C(s
1
s
2
, t
1
t
2
) (resp. = C(|s
1
s
2
|, [t
1
t
2
[)).
Puisque (s, t) R
d
R = R
d+1
, une approche possible est de considrer
le temps comme une dimension additionnelle et de reconduire les dnitions
et les proprits des modles tudis prcdemment pour la dimension d + 1.
Cependant, cette dmarche ne prend pas en compte le fait que les variables
despace et de temps ont des chelles et des interprtations direntes. Par
exemple, le modle exponentiel isotropique C(s, t) =
2
exp|(s, t)|/a, o
s R
d
et t R , nest pas raisonnable ; il est plus naturel de considrer un
modle danisotropie gomtrique du type C(s, t) =
2
exp(|s|/b +[t[/c),
1.6 Modles spatio-temporels 23
b, c > 0. La proposition 1.1 fournit alors des outils permettant de dnir
des modles stationnaires plus riches o les variabilits spatiale et temporelle
sont analyses sparment. Dautre part, il peut tre intressant de proposer
des modles semi-causaux spatio-temporels, la notion de pass dans le temps
ayant tout son sens.
La covariance peut prendre une forme sparable, deux exemples tant :
(i) Additive : C(s, t) = C
S
(s) +C
T
(t)
(ii) Factorisante : C(s, t) = C
S
(s)C
T
(t)
o C
S
() est une covariance dans lespace et C
T
() est une covariance dans le
temps. Le premier cas (i) recouvre une anisotropie zonale ; cette anisotropie
dans lespace et le temps est identiable en utilisant une analyse variogra-
phique (cf. 5.1.1) spare pour lespace (considrer des couples de sites (s
1
, s
2
)
au mme instant t) et le temps (considrer des couples dinstants (t
1
, t
2
) au
mme site s).
Covariance espacetemps sparable
Le deuxime cas (ii) recouvre ce que lon appelle une covariance sparable
dans lespace et le temps.
Lavantage dun modle sparable est de faciliter le calcul de la ma-
trice de covariance, de son inverse et de son spectre si X est observ sur
un rectangle S T = s
1
, s
2
, . . . , s
n
t
1
, t
2
, . . . , t
m
. Plus prcisment, si
X =
t
(X
s1,t1
, . . . , X
sn,t1
, . . . , X
s1,tm
, . . . , X
sn,tm
) est le vecteur des nm ob-
servations, = Cov(X) est le produit de Kronecker de
T
, la matrice mm
de covariance dans le temps, avec
S
, la matrice n n de covariance dans
lespace :
=
T
S
,
ce produit tant la matrice mnmn constitue de mm blocs
k,l
, chacun
de taille n n,
k,l
valant C
T
(k l)
S
. Linverse et le dterminant de se
calculent alors facilement :
()
1
= (
T
)
1
(
S
)
1
, [[ = [
T
S
[ = [
T
[
n
[
S
[
m
.
et le spectre de est le produit terme terme des spectres de
T
et de
S
. Ces
proprits facilitent le krigeage, la simulation ou lestimation de tels modles,
dautant plus que le domaine dobservation spatial (n) et/ou temporel (m)
est grand.
Linconvnient dun modle sparable est de ne pas autoriser dinterac-
tions croises spatio-temporelles C
S
(s
1
s
2
; u) entre instants distants de u
puisque C(s
1
s
2
, t
1
t
2
) = C
S
(s
1
s
2
)C
T
(u). Dautre part, la sparabi-
lit implique la symtrie par rexion C(s, t) = C(s, t) = C(s, t) de la
covariance, condition non-ncessaire en gnral.
24 1 Modle spatial du second ordre et gostatistique
Modles non-sparables
Cressie et Huang [50] proposent de construire un modle non-sparable
partir de sa d.s. g :
C(h, u) =
_
R
d
_
R
e
i(
t
h+u)
g(, )dd. (1.12)
Ecrivant g(, ) comme la transforme de Fourier sur R dune fonction h(, ),
g(, ) =
1
2
_
R
e
iu
h(, u)du,
o h(, u) =
_
R
e
iu
g(, )d, la covariance spatio-temporelle scrit
C(h, u) =
_
R
d
e
i
t
h
h(, u)d.
Mais on peut toujours crire que :
h(, u) = k()(, u) (1.13)
o k() est une d.s. sur R
d
et o, pour tout , (, ) est une fonction dauto-
corrlation sur R. Ainsi, sous les conditions :
1. Pour chaque , (, ) est une fonction dautocorrlation sur R, continue
et telle que
_
R
(, u)du < et k() > 0.
2.
_
R
d
k()d < .
la fonction C dnie par :
C(h, u) =
_
R
d
e
i
t
h
k()(, u)d. (1.14)
est une covariance spatio-temporelle. Si (, u) est indpendant de , le mo-
dle est sparable.
Exemple 1.6. Modle de Cressie et Huang : si on choisit,
(, u) = exp
_
||
2
u
2
4
_
exp
_
u
2
_
, > 0 et
k() = exp
_
c
0
||
2
4
_
, c
0
> 0,
alors :
C(h, u)
1
(u
2
+c
0
)
d/2
exp
_
|h|
2
u
2
+c
0
_
exp
_
u
2
_
. (1.15)
1.7 Les modles auto-rgressifs spatiaux 25
La condition > 0 est ncessaire pour assurer que
_
(0, u)du < mais la
limite lorsque 0 de (1.15) est encore une fonction de covariance spatio-
temporelle.
Linconvnient de cette approche est de dpendre du calcul de transformes
de Fourier sur R
d
. Gneiting [90] propose une autre approche : soit (t), t 0,
une fonction strictement monotone et t (t) > 0, t 0, une fonction
telle que
t
(t) est strictement monotone. Alors la fonction suivante est une
covariance spatio-temporelle :
C(h, u) =
2
([u[
2
)
d/2
_
|h|
2
([u[
2
)
_
. (1.16)
Exemple 1.7. Covariance spatio-temporelle de Gneiting
Si (t) = exp(ct
), (t) = (at
+ 1)
, avec a 0, c 0, , ]0, 1],
[0, 1] et
2
> 0, la fonction suivante est une covariance spatio-temporelle
sur R
d
R (sparable si = 0) :
C(h, u) =
2
(a[u[
2
+ 1)
d/2
exp
_
c|h|
2
(a[u[
2
+ 1)
_
. (1.17)
On en dduit des covariances non-sparables par mlange de covariances
(cf. Prop. 1.1) : si est une mesure non-ngative sur un espace W, C
S
(, w) et
C
T
(, w) pour tous les w W sont deux covariances stationnaires telles que
_
W
C
S
(0, w)C
T
(0, w)(dw) < ,
alors [58; 147],
C(h, u) =
_
W
C
S
(h, w)C
T
(u, w)(dw) < ,
est une covariance stationnaire en gnral non stationnaire. Par exemple,
C(h, t) =
n+1
_
|h|
a
+
]t]
b
+
_
n+1
, 0 < , 2, (1.18)
est un mlange de ce type pour une loi Gamma de moyenne (n + 1)/
des covariances spatiale et temporelle proportionnelles respectivement
exp(|h|
/a) et exp([t[
/b).
1.7 Les modles auto-rgressifs spatiaux
Les modles dauto-rgressions (AR) spatiaux sont utiles pour analyser, d-
crire et interprter un phnomne spatial rel X = X
s
, s S dni sur un
rseau spatial discret S muni dune gomtrie de voisinage.
26 1 Modle spatial du second ordre et gostatistique
Dans des domaines dapplication tels que lconomtrie, la gographie,
lenvironnement, lpidmiologie, le rseau S nest pas rgulier, les sites s S
correspondant des centres dunits gographiques disposes dans lespace et
lobservation X
s
intgrant la variable dintrt sur lunit s. Cette irrgularit
du rseau S est une premire dirence entre les auto-rgressions spatiales
et les auto-rgressions temporelles pour lesquelles, classiquement, S est un
intervalle de Z
1
.
Dans dautres domaines, tels limagerie, la radiographie ou la tldtection,
le rseau S est rgulier, typiquement un sous-ensemble de Z
d
. Cette particu-
larit permet de dnir des modles stationnaires et de rapprocher ltude
des champs AR sur Z
d
de celle des sries temporelles sur Z
1
. Cependant, une
dirence fondamentale apparat : les modles spatiaux sont naturellement
non-causaux au sens o ils ne sont pas dnis, contrairement aux sries tem-
porelles, en relation avec une relation dordre sur S. Si la causalit temporelle
est pleinement justie pour expliquer et modliser une variable X
t
telle un
taux dination, un cours en bourse, le dbit dune rivire, ce nest pas le cas en
situation spatiale, les dpendances auto-rgressives ayant lieu dans toutes les
directions de lespace. Ainsi la prsence ou non dune plante sur une parcelle
dpendra de cette prsence/absence de la plante dans les parcelles voisines,
ceci dans toutes les directions.
Nous commencerons par prsenter rapidement les modles MA, ARMA
et AR stationnaires sur Z
d
(cf. [96] pour une prsentation plus complte).
Aprs quoi nous nous intresserons aux AR sur un rseau gnral ni, plus
particulirement deux classes importantes dAR, savoir les modles SAR
(pour Simultaneous AR) et les modles CAR (pour Conditional AR).
1.7.1 Modles MA, ARMA stationnaires
Modle MA
Soit (c
s
, s Z
d
) une suite de l
2
(Z
d
) (c--d vriant :
Z
d c
2
s
< ) et un
BBf sur Z
d
de variance
2
. Un modle MA() sur Z
d
(MA pour Moving
Average) est un processus linaire dni dans L
2
par :
X
t
=
sZ
d
c
s
ts
. (1.19)
X est la moyenne mobile innie du bruit pour les poids c.
Proposition 1.5. La covariance et la d.s. du processus MA dquation (1.19)
sur Z
d
valent respectivement :
C(h) =
2
tZ
d
c
t
c
t+h
et f(u) =
2
(2)
d
tZ
d
c
t
e
i
t
ut
2
.
1.7 Les modles auto-rgressifs spatiaux 27
Preuve. Le calcul de C utilise la bilinarit de la covariance et le fait que
est un BBf. Quant la d.s., elle est identie partir de la formule dinversion
de Fourier (1.4) :
f(u) =
2
(2)
d
hZ
d
tZ
d
c
t
c
t+h
e
i
t
ut
=
2
(2)
d
tZ
d
c
t
e
i
t
ut
2
.
.
On parle de modle MA si le support M = s Z
d
: c
s
,= 0 de la
suite des poids est ni. La covariance C est nulle en dehors de son support
S(C) = MM = h : h = t s pour s, t M. Si pour d = 1, tout processus
de covariance support ni admet une reprsentation MA, ceci nest plus
vrai si d 2 (cf. (1.8)).
Modle ARMA
Ces modles tendent les ARMA temporels (d = 1) : soient P et Q deux
polynomes de la variable complexe d-dimensionnelle z C
d
,
P(z) = 1
sR
a
s
z
s
et Q(z) = 1 +
sM
c
s
z
s
,
R (resp. M), le support AR (resp. le support MA) tant une partie nie de
Z
d
ne contenant pas lorigine, z
s
= z
s1
1
. . . z
s
d
d
si s = (s
1
, s
2
, . . . , s
d
). Notons
B
s
X
t
= X
ts
loprateur de s-translation dans L
2
. Formellement, un ARMA
est associ aux polynomes P et Q et un BBf de L
2
par lcriture :
t Z
d
: P(B)X
t
= Q(B)
t
(1.20)
ou encore
t Z
d
: X
t
=
sR
a
s
X
ts
+
t
+
sM
c
s
ts
.
Notons T = C, [[ = 1 le tore unidimensionnel. On a le rsultat dexis-
tence suivant :
Proposition 1.6. Supposons que P ne sannule pas sur le tore T
d
. Alors
lquation (1.20) admet une solution stationnaire X dans L
2
. La d.s. de X
vaut, en notant e
iu
= (e
iu1
, . . . , e
iu
d
) :
f(u) =
2
(2)
d
Q
P
(e
iu
)
2
,
la covariance sidentiant aux coecients de Fourier de f.
28 1 Modle spatial du second ordre et gostatistique
Preuve. P ne sannulant pas sur le tore T
d
, P
1
Q admet un dveloppement
en srie de Laurent,
P
1
(z)Q(z) =
sZ
d
c
s
z
s
,
ce dveloppement convergeant au voisinage du tore T
d
et les coecients (c
s
)
dcroissant exponentiellement vite vers 0. Ceci nous assure que le processus
X
t
=
sZ
d c
s
ts
existe bien dans L
2
, quil satisfait lquation (1.20) et quil
admet pour d.s.
f(u) =
2
(2)
d
sZ
d
c
s
e
i
t
su)
2
=
2
(2)
d
Q
P
(e
iu
)
2
.
.
Un modle MA correspond au choix P 1, un modle AR au choix
Q 1. Comme pour les sries temporelles, lintrt des modles ARMA
est quils approchent tout champ d.s. continue : en eet, quelle que soit la
dimension d, les fractions rationnelles sont denses (par exemple pour la norme
du sup) dans lespace de fonctions continues sur le tore T
d
.
La d.s. dun ARMA tant rationnelle, sa covariance dcrot exponentiel-
lement vite vers 0 linni. L encore, comme pour une srie temporelle, les
covariances vrient partir dun certain rang des quations de rcurrences
linaires, dites quations de Yule-Walker. Sur Z, ces quations se rsolvent
analytiquement et elles constituent loutil didentication des portes R et
M des parties AR et MA et destimation des paramtres a et c. Mais en
dimension d 2, les quations de Yule-Walker ne se rsolvent pas analyti-
quement. De plus, contrairement aux sries temporelles, un ARMA nadmet
pas en gnral de reprsentation unilatrale (ou causale) nie pour lordre
lexicographique si d 2 (cf. (1.8)).
Bien quaucune raison thorique ne soppose leur utilisation (cf. par
exemple [119]), les remarques prcdentes expliquent pourquoi, contrairement
lanalyse des sries temporelles, la modlisation ARMA est peu utilise en
statistique spatiale.
Signalons cependant que lutilisation de modles spatio-temporels semi-
causaux (non-causaux dans lespace et causaux dans le temps) peut savrer
bien adapte ltude dune dynamique spatiale : tel est le cas des mo-
dles STARMA (Spatio-Temporal ARMA) introduit par Pfeifer et Deutsch
[76; 174] (cf. galement [48, 6.8]).
Deux modlisations auto-rgressives, les SAR et les CAR, sont trs utili-
ses en analyse spatiale. Examinons dabord le cas de modles stationnaires.
1.7.2 Auto-rgression simultane stationnaire
Pour simplier, on supposera que X est centr. Soit R un sous-ensemble ni
de Z
d
ne contenant pas lorigine. Un modle stationnaire SAR (pour Simul-
teanous AR) relatif au BBf et de paramtres a = a
s
, s R est le modle :
1.7 Les modles auto-rgressifs spatiaux 29
X
t
=
sR
a
s
X
ts
+
t
. (1.21)
X
t
est la somme pondre des valeurs X
u
aux R-voisins de t, bruite par
t
. Lexistence de X est assure ds que le polynme caractristique P de
lauto-rgression ne sannule pas sur le tore T
d
, o
P(e
i
) = 1
sR
a
s
e
i
t
s
.
Les quations (1.21) sinterprtent comme un systme dquations AR simul-
tanes au sens habituel de lconomtrie : les X
ts
, s R sont des variables
endognes retardes spatialement inuenant la rponse X
t
en t, un site u
ayant une inuence sur t si t u R. Cette relation dnit le graphe orient
du modle SAR. Donnons quelques exemples.
Exemple 1.8. Quelques modles SAR
Modle semi-causal espaceTemps
s Z repre lespace, t N le temps ; un exemple de dynamique markovienne
en t et locale en s est :
t N et s Z : X
s,t
= X
s,t1
+(X
s1,t
+X
s+1,t
) +
s,t
.
La liaison temporelle (s, t 1) (s, t) est oriente alors que les liaisons
spatiales instantanes (s, t) (s 1, t) ne le sont pas. La reprsentation
causale lexicographique de ce SAR est innie (cf. Fig. 1.6). Plus prcisment,
pour = = /(1 +
2
), ce modle semi-causal admet le reprsentation
causale innie pour lordre lexicographique (dni par (u, v) _ (s, t) si v < t
o si v = t et u s ; [24]),
X
s,t
= 2X
s1,t
+
2
X
s2,t
X
s1,t1
+(1
2
)
j0
j
X
s+j,t1
+
s,t
T
S
(s,t)
(s,t)
T
S
(a) (b)
Fig. 1.6. (a) Modle semi-causal ; (b) modle semi-causal pour lordre lexicogra-
phique
30 1 Modle spatial du second ordre et gostatistique
Modle SAR isotropique aux 4-ppv sur Z
2
X
s,t
= (X
s1,t
+X
s+1,t
+X
s,t1
+X
s,t+1
) +
s,t
.
Ici, le graphe est symtrique ; X existe si et seulement si,
, [0, 2[, P(, ) = 1 2(cos + cos ) ,= 0,
condition qui assure que la d.s. f(, ) =
2
P(, )
2
L
2
(T
2
) ; cette condi-
tion est vri ssi [[ < 1/4.
Modle SAR(1) factorisant
Un exemple de SAR sur Z
2
factorisant est,
X
s,t
= X
s1,t
+X
s,t1
X
s1,t1
+
s,t
, [[ et [[ < 1 (1.22)
Notant B
1
et B
2
les oprateurs de retard relatifs aux coordonnes s et t,
lquation (1.22) scrit :
(1 B
1
)(1 B
2
)X
s,t
=
s,t
.
On en dduit que la covariance c de X est sparable,
c(s s
t
, t t
t
) =
2
[ss
[tt
[
,
o
2
=
2
(1
2
)
1
(1
2
)
1
, produit dune covariance AR(1) unidimen-
sionnelle de paramtre et dune covariance du mme type de paramtre .
Il est facile de gnraliser ces modles des ordres dauto-rgression p =
(p
1
, p
2
) quelconques ainsi qu des dimensions d 2. La factorisation du
polynme AR et de la covariance rendent ces modles simples manipuler
(cf. 1.6).
Les modles SAR sont trs utiliss pour leur simplicit et leur parcimonie
paramtrique. Cependant, il faudra veiller aux deux problmes suivants :
1. Sans contrainte, un SAR nest pas (en gnral) identiable : rappelons
quun modle /() est identiable si les lois quil dnit pour deux
dirents sont direntes ; par exemple, sur Z, il est facile de vrier que
les trois reprsentations SAR suivantes :
(i) X
t
= aX
t1
+bX
t+1
+
t
, t Z
1
, a ,= b, [a[, [b[ < 1/2
(ii) X
t
= bX
t1
+aX
t+1
+
t
(iii) X
t
= a
1
X
t1
+ a
2
X
t2
+
t
sont identiques pour des choix appropris de a
1
, a
2
et des variances des
BBf ,
et (il sut didentier les d.s. et de voir que lon peut imposer
des contraintes permettant dgaler les trois d.s.). Par contre, si on impose
la contrainte a < b, le modle (i) est identiable.
2. Comme pour des quations simultanes de lconomtrie, lestimation dun
SAR par moindres carrs ordinaires (MCO) sur les rsidus nest pas
consistante (cf. Prop. 5.6).
1.7 Les modles auto-rgressifs spatiaux 31
1.7.3 Auto-rgression conditionnelle stationnaire
Supposons que X soit un processus centr, stationnaire au second ordre sur
Z
d
et admettant une d.s. f. Si f
1
L
1
(T
d
), X admet une reprsentation
linaire non-causale innie [96, Th. 1.2.2] :
X
t
=
sZ
d
\0]
c
s
X
ts
+e
t
.
Dans cette reprsentation, c
s
= c
s
pour tout s et e
t
est un rsidu condition-
nel, c--d que pour tout s ,= t, e
t
est non-corrl X
s
.
Ceci nous conduit la dnition suivante des champs L-markoviens ou
CAR(L) : soit L une partie nie symtrique de Z
d
ne contenant pas lorigine
0, L
+
le demi-espace L positif pour lordre lexicographique sur Z
d
.
Dnition 1.9. Un CAR(L) stationnaire de L
2
scrit, pour tout t Z
d
,
X
t
=
sL
c
s
X
ts
+e
t
avec, si s L
+
: c
s
= c
s
; (1.23)
s ,= t : Cov(e
t
, X
s
) = 0 et E(e
t
) = 0
La non-corrlation entre X
s
et e
t
si s ,= t traduit le fait que
sL
c
s
X
ts
=
sL
+ c
s
(X
ts
+X
t+s
) est la meilleure prdiction linaire dans L
2
de X
t
sur
toutes les autres variables X
s
, s ,= t : en ce sens, X est L-markovien au sens
de la prdiction linaire. Si X est gaussien, cest la meilleure prdiction et on
dit que X est un champ gaussien L-markovien . Plusieurs aspects direncient
les CAR des SAR :
1. Un CAR exige des contraintes paramtriques : L est symtrique et pour
tout s, c
s
= c
s
.
2. Les rsidus conditionnels e
t
ne forment pas un bruit blanc : on dit que
e
t
est un bruit color.
3. Les rsidus e
t
sont dcorrls des X
s
si s ,= t.
Proposition 1.7. Le modle X dni par (1.23) existe dans L
2
si le polynome
caractristique du CAR,
P
() = (1 2
sL
+
c
s
cos(
t
su))
ne sannule pas sur le tore T
d
. Dans ce cas, la d.s. vaut
f
X
(u) =
2
e
(2)
d
P
()
1
et les rsidus conditionnels forment un bruit color de covariance :
Cov(e
t
, e
t+s
) =
_
2
e
si s = 0,
2
e
c
s
si s L
et Cov(e
t
, e
t+s
) = 0 sinon.
32 1 Modle spatial du second ordre et gostatistique
Preuve. On traduit que E(e
0
X
u
) = 0 si u ,= 0 et E(e
0
X
0
) =
2
e
pour u=0.
Puisque e
0
= X
0
sL
c
s
X
s
, cette orthogonalit se traduit dans le do-
maine frquentiel par lgalit :
u ,= 0 :
_
T
d
e
i,u)
[1
sL
c
s
e
i,s)
]f
X
()d = 0.
Le thorme de Plancherel dit alors que f
X
(u) =
2
e
(2)
d
P
(u)
1
. Le rsidu
e
t
= X
t
sL
c
s
X
ts
tant un ltr linaire de X, a pour d.s.
f
e
(u) =
2
e
(2)
d
P(u)
1
[P(u)[
2
=
2
e
(2)
d
P(u).
Do le rsultat annonc. .
Notons que l o la d.s. dun CAR est proportionnelle P
(u)
1
, celle
dun SAR est proportionnelle [P(u)[
2
. En dimension d 3, la condition
P
ne sannule pas sur le tore nest pas ncessaire (cf. Ex. 1.12).
Comme pour un SAR, les quations de Yule-Walker sur la covariance
dun CAR sobtiennent en multipliant par X
s
lquation dnissant X
t
, puis
en prenant lesprance : par exemple, pour le CAR isotropique aux 4-ppv sur
Z
2
, ces quations sont :
s : r(s) =
2
e
0
(s) +a
t:|ts|
1
=1
r(t).
Trois raisons peuvent justier le choix dune modlisation CAR :
1. Une reprsentation CAR est intrinsque : cest la meilleure prdiction
linaire de X
t
sur ses autres valeurs X
s
, s ,= t.
2. Lestimation dun modle CAR par MCO est consistante (cf. Prop. 5.6).
3. La famille des CAR stationnaires contient celle des SAR, strictement si
d 2.
Proposition 1.8. Modles SAR et modles CAR stationnaires sur Z
d
1. Tout SAR est un CAR. Sur Z, les deux classes concident.
2. Si d 2, la famille des CAR est plus grande que celle des SAR.
Preuve. 1. Pour obtenir la reprsentation CAR du SAR : P(B)X
t
=
t
, on
crit la d.s. f de X et on lidentie celle dun CAR en dveloppant
P(e
i
)
2
=
sR
a
s
e
i,s)
2
. On obtient ainsi le support L du CAR
et ses coecients (c
s
, s L), en imposant la normalisation c
0
= 0 :
f(u) =
2
(2)
d
[P(e
iu
)[
2
=
2
e
(2)
d
C(e
iu
)
, avec c
0
= 1.
Pour A B = i j : i A et j B, on obtient :
1.7 Les modles auto-rgressifs spatiaux 33
L = R
0, o R
= R 0 et
si s L : c
s
= (
2
e
/
2
v,v+sR
a
v
a
v+s
si s ,= 0 et 0 sinon.
Pour d = 1 lidentit des classes SAR et CAR rsulte du thorme de Fejer
qui dit que tout polynome trigonomtrique P
(e
i
) dune seule variable
complexe qui est 0 est le module au carr dun polynome trigonom-
trique : si P
(e
i
) 0, il existe P t.q. P
(e
i
) =
P(e
i
)
2
. Ainsi le
CAR-P
sidentie au SAR-P.
2. Montrons que sur Z
2
le CAR, X
t
= c
s:|st|
1
=1
X
s
+e
t
, c ,= 0, nadmet
pas de reprsentation SAR. La d.s. de X vrie :
f
1
X
(
1
,
2
) = c(1 2c(cos
1
+ cos
2
)). (1.24)
Si un SAR admet f
X
pour d.s., son support R vrie R L. Notant (a
s
)
les coecients du SAR, on doit avoir soit a
(1,0)
,= 0, soit a
(1,0)
,= 0,
par exemple a
(1,0)
,= 0 ; de mme a
(0,1)
o a
(0,1)
,= 0, par exemple
a
(0,1)
,= 0. Mais alors un terme non-nul en cos(
1
2
) devrait apparatre
dans f
1
X
, ce qui nest pas le cas. Le modle CAR (1.24) nadmet pas de
reprsentation SAR.
.
Un processus MA de support ni est covariance de porte borne. Si
d = 1, le thorme de Fejer assure que la rciproque est vraie : un processus
sur Z de covariance de porte borne est une MA. Ceci nest plus vrai si
d 2 : par exemple, le champ de corrlation distance 1, 0 distance
> 1, nadmet pas de reprsentation MA; la preuve repose sur des arguments
similaires ceux de la partie (2) de la proposition prcdente.
Donnons quelques exemples de reprsentation CAR dun SAR sur Z
2
.
Exemple 1.9. Correspondances SAR CAR
1. LAR causal (cf. Fig. 1.7-a) de support R = (1, 0), (0, 1) :
X
s,t
= X
s1,t
+X
s,t1
+
s,t
,
est un CAR(L) de demi support L
+
= (1, 0), (0, 1), (1, 1), et de
coecients c
1,0
=
2
, c
0,1
=
2
, c
1,1
=
2
et
2
e
=
2
, o
2
= (1 +
2
+
2
)
1
.
2. Le SAR non-causal :
X
s,t
= a(X
s1,t
+X
s+1,t
) +b(X
s,t1
+X
s,t+1
) +
s,t
est un CAR(L) (cf. Fig. 1.7-b) de demi-support L
+
= (1, 0), (2, 0),
(1, 1), (0, 1), (0, 2), (1, 1), (0, 2), et de coecients :
c
1,0
= 2a
2
, c
0,1
= 2b
2
, c
2,0
= 2a
2
2
, c
0,2
= 2b
2
2
c
1,1
= 2ab
2
,
2
e
=
2
2
o
2
= (1 + 2a
2
+ 2b
2
)
1
.
34 1 Modle spatial du second ordre et gostatistique
R
L
+
L
L
+
R
L
(a) (b)
Fig. 1.7. (a) Support R = {(1, 0), (0, 1)} du modle SAR causal et support L
du CAR associ ; (b) support R = {(1, 0), (0, 1), (1, 0), (0, 1)} du modle SAR
non-causal et support L du CAR associ.
3. Le SAR factorisant :
X
s,t
= X
s1,t
+X
s,t1
X
s1,t1
+
s,t
, [[ et [[ < 1,
est un CAR aux 8-ppv, de coecients
c
1,0
= (1 +
2
)
1
, c
0,1
= (1 +
2
)
1
, c
1,1
= c
1,1
= c
1,0
c
0,1
2
e
=
2
2
o
2
= (1 +
2
)
1
(1 +
2
)
1
Dans ces trois exemples,
2
< 1 est le gain en variance de la prdiction
CAR de X compare la prdiction SAR.
1.7.4 AR non-stationnaire sur un rseau ni S
Un champ rel sur S = 1, 2, . . . , n est une v.a. vectorielle X
R
n
. La
non-stationnarit de X
peut porter la fois sur le vecteur des esprances
= E(X
), sur le rseau S et sur la matrice de covariance = Cov(X
). On
ne sintressera ici qu la non-stationnarit au second ordre, travaillant sur
le processus recentr X = X
pour lequel = Cov(X
) = Cov(X).
Soit = (
t
, t S) un bruit centr de L
2
. Des reprsentations, site par
site ou globales, MA, AR et ARMA de X sur la base de sont dnies par
les quations :
1.7 Les modles auto-rgressifs spatiaux 35
MA : X
t
=
sS
b
t,s
s
, ou X = B,
AR : X
t
=
sS:s,=t
a
t,s
X
s
+
t
, ou AX = ,
ARMA : X
t
=
sS:s,=t
a
t,s
X
s
+
sS
b
t,s
s
ou AX = B,
o, pour s, t S, B
t,s
= b
t,s
, A
s,s
= 1, A
t,s
= a
t,s
si t ,= s. La reprsentation
MA est toujours dnie ; les reprsentations AR et ARMA le sont ds que A
est inversible. Si = Cov(), ces modles sont caractriss au second ordre
par leur covariance :
MA : = B
t
B;
AR : = A
1
t
(A
1
);
ARMA : = (A
1
B)(
t
(A
1
B)).
Choisissons pour un BBf de variance 1 ( = I
n
), et notons < un ordre
total (arbitraire) dnumration des points de S. Si X est centr, de covariance
inversible, alors X admet une unique reprsentation AR causale relative
et lordre <; cette reprsentation est associe la matrice triangulaire inf-
rieure A
de la factorisation de Cholesky =
t
A
. Le fait que A
, comme
, dpende de n(n + 1)/2 paramtres, conrme lidentiabilit du modle
AR causal. Les reprsentations AR quivalentes, en gnral non-identiables,
scrivent
AX = , o, pour une matrice P orthogonale, = P ( est encore
un BBf de variance 1) et
A = PA
.
Dans la pratique, un modle AR est associ un graphe dinuence non
ncessairement symtrique : s t est une arte (oriente) de si X
s
a une
inuence sur X
t
, ceci avec un poids a
t,s
, le voisinage de t tant ^
t
= s S :
s t.
Reprsentation SAR locale un paramtre
Soit W = (w
t,s
)
t, sS
une matrice de poids ou graphe dinuence mesurant
linuence de s sur t, avec, pour tout t, w
t,t
= 0 : par exemple, W est la
matrice de contigut spatiale constitue de 1 si s a une inuence sur t, de
0 sinon. Dautres choix de W sont dcrits dans le livre de Cli et Ord [45]
(cf. galement le 5.2). Une fois W choisie, une modlisation spatiale classique
en conomtrie ou en pidmiologie spatiale est celle dun SAR un paramtre
: si t S et si est un BBf(
2
),
X
t
=
s:s,=t
w
t,s
X
s
+
t
, ou X = WX +.
Le modle est bien dni ds que A = I W est inversible.
36 1 Modle spatial du second ordre et gostatistique
Reprsentation markovienne CAR
A nouveau, considrons le vecteur recentr X. Une reprsentation CAR scrit
en terme desprance conditionnelle linaire (desprance conditionnelle si X
est gaussien) :
X
t
=
sS: s,=t
c
t,s
X
s
+e
t
, t S (1.25)
avec E(e
t
) = 0, V ar(e
t
) =
2
t
> 0, Cov(X
t
, e
s
) = 0 si t ,= s. Dans cette
reprsentation intrinsque, e est un rsidu conditionnel.
Une reprsentation CAR est associe un graphe de voisinage ( de S
ainsi dni : s t est une arte de ( si c
t,s
,= 0. Comme on va le voir, (
est symtrique. Notons C la matrice de coecients C
s,s
= 0 et C
t,s
= c
t,s
si s ,= t, D la matrice diagonale de coecients D
t,t
=
2
t
. Les quations de
Yule-Walker, = C + D sobtiennent en multipliant (1.25) par X
s
pour
s S, puis en prenant lesprance. vrie donc :
(I C) = D.
Ainsi (1.25) dnit un modle CAR de matrice de covariance rgulire
ssi
1
= D
1
(I C) est symtrique et dnie positive. En particulier, la
reprsentation (1.25) doit vrier les contraintes :
c
t,s
2
s
= c
s,t
2
t
, t ,= s S. (1.26)
Donc c
t,s
,= 0 si c
s,t
,= 0 ce qui implique que le graphe ( du CAR soit
symtrique. Dans un algorithme destimation dun CAR, il faudra veiller
intgrer ces contraintes. Si X est stationnaire (par exemple sur le tore ni
S = (Z/pZ)
d
), on reparamtrera le modle en c
ts
= c
t,s
= c
st
= c
ts
pour
t ,= s. Sous hypothse gaussienne (1.25) spcie compltement le modle.
Notons que, la dirence des modles stationnaires sur Z
d
(cf. Prop. 1.8),
si S est ni, la famille des SAR concide avec celle des CAR.
Champ gaussien markovien
Supposons que X soit un champ gaussien sur S, X ^
n
(, ), o est
inversible, et que S soit muni dun graphe ( symtrique et sans boucle, s, t)
signiant que s et t sont voisins pour (. On dira que X est un champ (-
markovien si, notant Q = (q
s,t
) =
1
, alors q
st
= 0 sauf si s, t). Dans ce
cas, on a pour tout t S,
L(X
t
[X
s
, s ,= t) ^(
t
q
1
t,t
s:t,s)
q
t,s
(X
s
s
), q
1
t,t
)
et X suit le modle CAR : pour tout t S,
X
t
t
= q
1
t,t
s:t,s)
q
t,s
(X
s
s
) +e
t
, V ar(e
t
) = q
1
t,t
. (1.27)
1.7 Les modles auto-rgressifs spatiaux 37
Notons [Q] la matrice n n de diagonale 0, [Q]
t,s
= q
t,s
si t ,= s et Diag(Q)
la matrice diagonale de diagonale celle de Q : (1.27) scrit,
X = (Diag)
1
[Q](X ) +e.
Comme on le verra au Ch. 2, les CAR gaussiens sont des modles de Gibbs
de potentiels quadratiques [189].
Graphe markovien ( dun SAR
Soit BBG(
2
) un bruit blanc gaussien. Le SAR gaussien AX = existe
si A
1
existe, de covariance inverse
1
= Q =
2
(
t
AA), de graphe SAR :
t, s)
7
a
t,s
,= 0. Sa reprsentation CAR (1.27) est :
1. Les coecients du CAR sont : c
t,s
= q
t,s
/q
t,t
o q
t,s
=
lS
a
l,t
a
l,s
.
2. Le graphe ( de la reprsentation markovienne CAR de X est :
t, s)
soit t, s)
7
,
soit s, t)
7
soit l S t.q. l, t)
7
et l, s)
7
( est non-orient de porte double de celle de (cf. Fig. 1.8).
Exemple 1.10. Reprsentation CAR dun SAR aux plus proches voisins
Soit W = (w
t,s
)
t, sS
une matrice de poids mesurant linuence de s sur t,
avec, pour tout t, w
t,t
= 0 ; considrons le SAR un paramtre :
X = WX +,
(a) (b)
Fig. 1.8. (a) Graphe orient R dun SAR; (b) CAR associ, graphe G (nouvelles
liaisons en pointill) et voisinage conditionnel () du point ().
38 1 Modle spatial du second ordre et gostatistique
o est un BBf(
2
). Le CAR associ ce SAR est donn par (1.27) avec
= 0 et une covariance inverse Q =
1
X
:
Q =
2
(I (W +
t
W) +
2 t
WW).
Quant la meilleure prdiction linaire de X, cest le vecteur
X = (Diag)
1
[Q]X.
1.7.5 Modles auto-rgressifs avec covariables : SARX
Ces modles sont particulirement utiliss en conomtrie spatiale. Supposons
que Z soit une matrice relle n p de conditions exognes observables. Une
modlisation SARX (X pour eXogne) propose, de faon additionnelle une
rgression de X sur Z, une mme structure de poids W agissant sparment
sur lendogne X et sur lexogne Z [7] :
X = WX +Z +WZ +, R, et R
p
. (1.28)
Trois facteurs expliquent X : les variables de rgressions habituelles (Z), les
endognes (WX) et les exognes retardes (WZ), pour les mme poids W
mais avec des paramtres autonomes.
Le sous-modle en facteur commun, ou modle de Durbin spatial, est as-
soci la contrainte = , cest--dire au modle de rgression rsidu
SAR :
(I W)X = (I W)Z + ou X = Z + (I W)
1
. (1.29)
Le sous-modle dcalage spatial correspond au choix = 0 :
X = WX +Z +, (1.30)
Notons que ces modles orent trois modlisations direntes de la
moyenne, respectivement :
E(X) = (IW)
1
[Z+WZ], E(X) = Z et E(X) = (IW)
1
Z ,
mais une mme structure de covariance
1
2
= (I
t
W)(I W) si
est un BBf de variance
2
. Lestimation de ces modles par MV gaussien
sobtiendra en explicitant la moyenne et la variance de X en fonction des
paramtres.
Des variantes de ces modles peuvent tre envisages, par exemple en pre-
nant pour un modle SAR associ une matrice de poids H et un pa-
ramtre rel . On peut galement envisager que les deux matrices de poids
associes aux endognes et aux exognes soient distinctes.
1.8 Le modle de rgression spatiale 39
1.8 Le modle de rgression spatiale
On parle de rgression spatiale quand le processus X = (X
s
, s S) est
la somme dune partie dterministe m() reprsentant la variation grande
chelle, la drive, la tendance ou moyenne de X, et de , un champ de rsidus
centrs :
X
s
= m(s) +
s
, E(
s
) = 0.
Dpendant du contexte de ltude et de linformation exogne disponible,
il y a de nombreuses faons de modliser m(), soit par rgression (linaire ou
non), soit par analyse de la variance (exogne qualitative), soit par analyse de
la covariance (exogne valeurs quantitative et qualitative), soit en utilisant
un modle linaire gnralis :
surface de rponse : m(s) =
p
l=1
l
f
l
(s) est dans un espace linaire de fonc-
tions connues f
l
. Si f
l
est une base de polynomes, lespace engendr
est invariant vis--vis de lorigine des coordonnes. Si s = (x, y) R
2
,
un modle quadratique dans les coordonnes est associ aux monmes
f
l
= 1, x, y, xy, x
2
, y
2
,
m(x, y) = +ax +by +cx
2
+dxy +ey
2
.
dpendance exogne : m(s, z) =
p
l=1
l
z
(l)
s
sexprime partir de variables
exognes observables z
s
.
analyse de la variance : si s = (i, j) 1, 2, . . . , I 1, 2, . . . , J, on consi-
dre un modle additif : m(i, j) = +
i
+
j
avec
i
i
=
j
j
= 0.
analyse de la covariance : m() est une combinaison de rgressions et de com-
posantes danalyse de la variance :
m(s) = +
i
+j +z
s
, si s = (i, j).
Cressie [48] suggre la dcomposition suivante pour le rsidu
s
:
X
s
= m(s) +
s
= m(s) +W
s
+
s
+e
s
. (1.31)
W
s
est une composante lisse modlise par un processus intrinsque dont
la porte est de lordre de c fois (c < 1) la distance maximum entre les sites
dobservation ;
s
est une composante micro-chelle indpendante de W
s
et
de porte de lordre de c
1
la distance minimum entre les sites dobservation,
e
s
est une erreur de mesure ou composante ppitique indpendante de W et
de .
De faon gnrale, si X est observ en n sites s
i
S, un modle linaire
de rgression spatiale linaire scrit :
X
si
=
t
z
si
+
si
, i = 1, . . . , n (1.32)
o z
si
, R
p
, z
si
est une covariable (qualitative, quantitative, mixte) ob-
serve en s
i
et = (
si
, i = 1, . . . , n) un rsidu centr spatialement corrl.
40 1 Modle spatial du second ordre et gostatistique
Notant X =
t
(X
s1
, . . . , X
sn
), =
t
(
s1
, . . . ,
sn
), Z =
t
(z
s1
, . . . , z
sn
) la ma-
trice n p des conditions exognes, (1.32) scrit matriciellement :
X = Z +,
avec E() = 0 et Cov() = .
La deuxime tape consiste modliser partir dune fonction de co-
variance, dun variogramme ou encore dun modle AR spatial.
Exemple 1.11. Pluies dans lEtat du Parana (donnes parana du package geoR
[181] de R )
Ces donnes donnent la hauteur de pluie moyenne sur direntes annes
durant la priode maijuin pour 143 stations du rseau mtorologique de
lEtat de Parana, Brsil. La quantit de pluie peut tre inuence par di-
rents facteurs exognes, climatiques ou non comme lorographie, une moyenne
temporelle permettant den dattnuer les eets. Si on considre le nuage
de points donn la Fig. 1.9-a, on constate que le phnomne nest pas
stationnaire en moyenne, une modlisation ane de la surface de rponse
m(s) =
0
+
1
x+
2
y, s = (x, y) R
2
semblant raisonable. Reste proposer
une covariance sur R
2
pour les rsidus qui permettra dexpliciter la covariance
des 143 observations puis valider le modle au premier et au deuxime
ordre (cf. 1.3.3).
Exemple 1.12. Modlisation dun essai blanc
Ces donnes de Mercer et Hall [156] (cf. donnes mercer-hall dans le
site) gurent les rendements en bl dun essai blanc (c--d sans traitement)
en plein champ sur un domaine rectangulaire dcoup en 20 25 parcelles
(i, j) de mme taille 2.5 3.3 m. Si on observe la carte des symboles gurant
limportance de ces rendements (cf. Fig. 1.10-a), il nest pas vident de savoir
si la moyenne m() est constante ou non. Pour en juger, les donnes tant
100 200 300 400 500 600 700 800
1
5
0
2
0
0
2
5
0
3
0
0
3
5
0
4
0
0
4
5
0
0
100
200
300
400
500
x
y
100 200 300 400 500 600 700 800
1
5
0
2
0
0
2
5
0
3
0
0
3
5
0
4
0
0
4
5
0
0
100
200
300
400
500
x
y
(a) (b)
Fig. 1.9. (a) Donnes de pluie pour 143 stations du rseau mtorologique de
lEtat Parana, Brsil (donnes parana de geoR) ; (b) estimation dune tendance
linaire m(s).
1.8 Le modle de rgression spatiale 41
colonne
l
i
g
n
e
z
l
i
g
n
e
5 4 3
(a) (b)
colonne
z
1 3 5 7 9 11 13 15 17 19 21 23 25
Histogram of z
z
D
e
n
s
i
t
y
1.0 0.5 0.0 0.5 1.0
0
.
0
0
.
2
0
.
4
0
.
6
0
.
8
1
.
0
(c) (d)
Fig. 1.10. (a) Donnes de Mercer et Hall : rendements de bl sur un champ dcoup
en 2025 parcelles de mme taille ; les dimensions des symboles sont proportionnelles
au rendement ; (b) botes moustaches par lignes ; (c) botes moustaches par
colonnes ; (d) histogramme des donnes avec une estimation non-paramtrique de la
densit.
disposes sur une grille, on peut saider de botes moustaches par colonnes
et par lignes, celles-ci nous aidant decouvrir sil y a une tendance ou non
suivant lune ou lautre direction.
Lanalyse graphique (cf. Fig. 1.10-b et c) suggre quil ny a pas deet
ligne (i). On propose alors un modle avec le seul eet colonne (j) :
X
i,j
=
j
+
i,j
, i = 1, . . . , 20, j = 1, . . . , 25.
Exemple 1.13. Part du produit agricole brut consomme localement
Cli et Ord [45] ont analys la variabilit spatiale de la part X du produit
agricole brut consomme sur place pour les 26 comts S de lIrlande (donnes
42 1 Modle spatial du second ordre et gostatistique
plus petit que 9
9 12.2
12.2 19
plus grand que 19
plus petit que 3708
3708 4063
4063 4537
plus grand que 4537
(a) (b)
3000 4000 5000 6000 7000
1
0
1
5
2
0
2
5
3
0
Produit agricole brut
I
n
d
e
x
d
a
c
c
e
s
s
i
b
i
l
i
t
(c) (d)
Fig. 1.11. (a) Part, X, du produit agricole brut des 26 comts dIrlande consomme
intrieurement ; (b) indice, Y , daccessibilit routire ; (c) diagramme de dispersion
entre X et Y ; (d) graphe dinuence associ la spcication binaire.
eire du package spdep). Ces pourcentages (cf. Fig. 1.11-a) sont mis en rapport
avec un indice z mesurant laccessibilit routire du comt (cf. Fig. 1.11-b).
Le diagramme de dispersion (Fig. 1.11-c) montre que modle linaire,
X
s
=
0
+
1
z
s
+
s
, s S (1.33)
est raisonnable. Une analyse pralable des rsidus de (1.33) estims par MCO
montre que ceux-ci prsentent une corrlation spatiale. On modlise celle-ci
laide dune matrice W = (w
t,s
)
t, sS
de poids connus mesurant linuence de
s sur t. La Fig. 1.11-d donne le graphe dinuence associ la spcication
binaire symtrique et on choisit w
t,s
= 1 si s et t sont voisins, et w
t,s
= 0
sinon.
Un premier modle est le modle dcalage spatial (1.30) :
X
s
=
0
+
1
z
s
+
tS
w
s,t
X
t
+
s
1.9 Prdiction covariance connue 43
Une autre possibilit est dtudier une rgression rsidu SAR :
X
s
=
0
+
1
z
s
+
s
,
s
=
tS
w
s,t
t
+
s
avec un BB. Un modle gnralisant lun et lautre est (cf. Ex. 1.21) :
X
s
=
0
+
1
z
s
+
tS
w
s,t
X
t
+
s
,
o
s
=
tS
w
s,t
t
+
s
.
1.9 Prdiction covariance connue
Lobjectif poursuivi est de dresser des cartes de prdiction de X sur tout
S lorsque X est observ seulement en un nombre ni de points de S. La
dnomination krigeage, qui recouvre ce problme de prdiction, est due
Matheron : elle fait rfrence aux travaux de Krige [134], un ingnieur minier
sud-africain.
1.9.1 Le krigeage simple
Etant donnes n observations X
s1
, . . . , X
sn
dans S, lobjectif du krigeage
est de prdire linairement X
s0
en un site s
0
non-observ. On supposera que
la covariance (le variogramme) de X est connue. Si, comme cest le cas dans
la pratique, elle ne lest pas, elle devra tre pralablement estime (cf. 5.1.3).
Notons : X
0
= X
s0
, X =
t
(X
s1
, . . . , X
sn
), = Cov(X),
2
0
= V ar(X
0
) et
c = Cov(X, X
0
), c R
n
, les caractristiques (connues ou estimes) au second
ordre de X et considrons un prdicteur linaire de X
0
:
X
0
=
n
i=1
i
X
si
=
t
X.
Le critre de choix retenu est celui qui minimise lcart quadratique moyen
(EQM) de lerreur e
0
= X
0
X
0
EQM(s
0
) = E(X
0
X
0
)
2
. (1.34)
Le krigeage simple examine la situation o la moyenne m() de X est connue.
Sans restreindre le problme, on supposera que X est centr.
Proposition 1.9. Krigeage simple : la prdiction linaire de X
0
minimisant
(1.34) et la variance de lerreur de prdiction valent respectivement :
X
0
=
t
c
1
X,
2
(s
0
) =
2
0
t
c
1
c. (1.35)
44 1 Modle spatial du second ordre et gostatistique
X
0
est la prdiction linaire et sans biais de X
0
de moindre cart quadra-
tique (BLUP pour Best Linear Unbiased Predictor).
Preuve.
EQM(s
0
) =
2
0
2
t
c +
t
= ();
le minimum est atteint en un o les drives partielles de sannulent. On
obtient =
1
c et on vrie quon est bien en un minimum. Par substitution,
on obtient la variance derreur (1.35). .
Commentaire
La valeur optimale de nest autre que c = , c--d,
Cov(X
si
, X
0
X
0
) = 0 pour i = 1, . . . , n.
Ces galits traduisent que
X
0
est la projection orthogonale (pour le produit
scalaire de la covariance de X) de X
0
sur lespace engendr par les variables
X
s1
, . . . , X
sn
. Cette prdiction concide avec X
0
si s
0
est lun des sites dob-
servation. Si X est gaussien,
X
0
nest autre que lesprance conditionnelle
E(X
0
[ X
s1
, . . . , X
sn
) ; inconditionnellement, la loi de cette prdiction est
gaussienne et lerreur est X
0
X
0
^(0,
2
(s
0
)).
1.9.2 Krigeage universel
Plus gnralement, supposons que X = Z + suive un modle de rgression
linaire spatiale (1.32) : connaissant z
0
et la covariance du rsidu (mais
pas le paramtre moyen ), on cherche la prdiction linaire sans biais de X
0
,
c--d vriant
t
Z =
t
z
0
, qui minimise lcart quadratique moyen (1.34). Si
nest pas connue, elle sera estime pralablement (cf. 5.1.3).
Proposition 1.10. Krigeage universel : la meilleure prdiction linaire de X
0
sans biais est
X
0
=
t
c
1
+
t
(z
0
t
Z
1
c)(
t
Z
1
Z)
1t
Z
1
X. (1.36)
La variance de lerreur de prdiction est
2
(s
0
) =
2
0
t
c
1
c +
t
(z
0
t
Z
1
c)(
t
Z
1
Z)
1
(z
0
t
Z
1
c). (1.37)
Preuve. LEQM de la prdiction
t
X vaut :
EQM(s
0
) =
2
0
2
t
c +
t
..
Pour un multiplicateur de Lagrange, considrons la quantit :
(, ) =
2
0
2
t
c +
t
2(
t
Z
t
z
0
).
1.9 Prdiction covariance connue 45
Le minimum de en (, ) est atteint lorsque les drives partielles de en
et sannulent. En , on obtient =
1
(c + Z). Pour trouver , on
substitue dans la condition sans biais et on obtient
= (
t
Z
1
Z)
1
(z
0
t
Z
1
c),
=
1
c +
1
Z(
t
Z
1
Z)
1
(z
0
t
Z
1
c).
Par substitution dans EQM(s
0
), on obtient (1.36) et (1.37). .
Linterprtation de la prdiction (1.36) par krigeage universel est la sui-
vante : on rcrit (1.36) comme,
X
0
=
t
z
0
+c
1
(X Z
), avec
= (
t
Z
1
Z)
1t
Z
1
X.
On verra au Ch. 5 que
est lestimateur (optimal) des moindres carrs -
nraliss (MCG) de (cf. 5.3.4) : le krigeage universel de X
0
est donc la
somme de lestimation (optimale)
t
z
0
de E(X
0
) =
t
z
0
et du krigeage simple
c
1
(X Z
) des rsidus = (X Z
) estims par MCG.
Si X
s
= m +
s
o m est constante mais inconnue, on parle de krigeage
ordinaire.
Les formules de krigeage scrivent de faon analogue en termes du vario-
gramme si est un processus intrinsque (cf. Ex. 1.10) ; en eet, la stationna-
rit ne joue aucun rle dans lobtention des rsultats (1.36) et (1.37).
Le krigeage est un interpolateur exact puisque
X
s0
= X
s0
si s
0
est un
site dobservation : en eet, si s
0
= s
i
et si c est la i-me colonne de ,
alors
1
c =
t
e
i
o e
i
est le i-me vecteur de la base canonique de R
n
et
t
Z
1
c =
t
z
0
.
Rgularit de la surface de krigeage
La rgularit lorigine de la covariance C (du variogramme ) dtermine
la rgularit de la surface de krigeage s
X
s
, en particulier aux points
dchantillonnage (cf. Fig. 1.12) :
1. Pour le modle ppitique, si s
0
,= s
i
, alors
1
c = 0,
= n
1
n
i=1
X
si
et la prdiction nest autre que la moyenne arithmtique des (X
si
) si
s
0
,= s
i
, avec des pics
X
s0
= X
si
si s
0
= s
i
. Plus gnralement, si C(h) est
discontinue en 0, s
X
s
est discontinue aux points dchantillonnage.
2. Si C(h) est linaire lorigine, s
X
s
est continue partout mais elle nest
pas drivable aux points dchantillonnage.
3. Si C(h) est parabolique en 0, s
X
s
est continue et drivable partout.
Si en dimension d = 1 le krigeage utilise la covariance cubique (1.8), linter-
polateur est une fonction spline cubique. En dimension suprieure et pour une
46 1 Modle spatial du second ordre et gostatistique
0.0 0.2 0.4 0.6 0.8 1.0
0
.
0
0
.
2
0
.
4
0
.
6
0
.
8
1
.
0
h
C
(
h
)
exponentiel
gaussien
gaussien+ppitique
1.0 1.5 2.0 2.5 3.0 3.5 4.0
0
.
4
0
.
2
0
.
0
0
.
2
0
.
4
0
.
6
0
.
8
1
.
0
s
p
r
e
d
i
c
t
i
o
n
x
x
exponentiel
gaussien
gaussien+ppitique
Fig. 1.12. Rgularit ( droite) de la surface de krigeage (ici S = R, X2 = 1, X3 =
0.4) en fonction de la rgularit de la covariance en 0 : gauche, (i) exponentielle
C(h) = exp(|h|/0.2), (ii) gaussienne C(h) = exp(0.6|h|
2
/
3), (iii) gaussien +
eet ppitique C(h) = 10(h) + 0.7 exp(0.6h
2
/
3)(1 10(h)).
Fig. 1.13. Krigeage sur les donnes de pluie de lEtat du Parana donnant, en niveau
de gris, la prvision
Xs sur tout lEtat : (a) courbes de niveau associes au
Xs ; (b)
courbes de niveau associes lcart type de lerreur de prdiction.
covariance sparable cubique, les prdictions sont cubiques par morceaux dans
chaque variable [43, p. 272]. Une comparaison empirique entre les previsions
obtenues par fonctions splines ou par krigeage est donne par Laslett [140].
Exemple 1.14. Krigeage des pluies dans lEtat du Parana (suite)
Aprs une analyse prliminaire, nous avons estim (cf. 5.3.4) le modle de
rgression ane m(s) =
0
+
1
x +
2
y, s = (x, y) R
2
pour une covariance
gaussienne avec un eet ppitique pour le rsidu. La Fig. 1.13-a donne la
carte de prdiction par krigeage universel pour ce modle et la Fig. 1.13-b
son cart type.
1.9 Prdiction covariance connue 47
1.9.3 Expriences numriques
Une exprience numrique est une procdure dont lobjectif est dapprendre un
programme (un metamodle) y = f(x) qui associe une entre x S = [0, 1]
d
une rponse y R
q
[132; 193]. Ici, la dimension spatiale d de lentre x est en
gnral 3. Parmi les mthodes existantes, les mthodes statistiques spatiales
font lhypothse que y est alatoire associe x au travers dun modle spatial,
par exemple une rgression spatiale,
y =
t
z(x) +(x),
o z(x) est connue, R
p
est inconnue et est un champ gaussien station-
naire de covariance C. Le plus souvent, C est choisie sparable an dobtenir
des algorithmes de calcul rapides. Si on dispose dobservations (de calculs)
x
i
y
i
aux points dun dispositif O = x
1
, x
2
, . . . , x
n
de S, le krigeage
universel y
c
= y
c
(x), x S pour la covariance C donne une prvision de
y partout sur S et rpond au problme dapprentissage. Si la covariance d-
pend dun paramtre inconnu, on devra estimer pralablement et utiliser
le krigeage universel sous C
. A budget x et critre de prdiction donn,
on devra optimiser le dispositif exprimental O en minimisant le critre sur
tout S.
Choix dun plan dchantillonnage des sites dobservation
Supposons que X soit un champ de moyenne constante et que lon cherche
dterminer un plan dchantillonnage O = x
1
, x
2
, . . . , x
n
n points qui
minimise la variance intgre sur une rgion dintrt A R
d
,
V (O, A) =
_
A
E[X
s
X
s
(O)]
2
ds =
_
A
2
(s, O)ds. (1.38)
Dans cette dnition,
X
s
(O) et
2
(s, O) sont respectivement la prvision et
la variance de la prvision par O-krigeage ordinaire. Une approximation de
(1.38) sobtient en discrtisant A avec un sous-ensemble R A ni de cardinal
M > m. La minimisation de (1.38) sur R implique une recherche exhaustive
sur un ensemble
_
M
m
_
lments. Dans la pratique, on utilisera lalgorithme
squentiel approchant suivant :
1. Soit O
k1
= x
1
, . . . , x
k1
les k 1 premiers points slectionns et R
k
=
RO
k1
. Choisir x
k
= arg min
xR
k
V (O
k1
s, A).
2. Rpter le pas prcdent jusqu k = m.
Le critre V peut tre gnralis des champs non-stationnaires en
moyenne. Dautres critres de choix peuvent tre envisags.
48 1 Modle spatial du second ordre et gostatistique
Exercices
1.1. Eet dune corrlation spatiale sur la variance dune moyenne
empirique.
Soit X = X
s
, s Z
d
un champ stationnaire sur Z
d
de moyenne m et de
covariance C(h) =
2
|h|
1
o |h|
1
=
d
i=1
[h
i
[ et [[ < 1.
1. Pour d = 1 et X =
9
t=1
X
t
/9, montrer que:
V
1
() = VarX =
2
81
9 + 2
8
k=1
(9 k)
k
.
2. Pour d = 2 et X =
3
s=1
3
t=1
X
s,t
/9, montrer que :
V
2
() = Var(X) =
2
81
9 + 24 + 28
2
+ 16
3
+ 4
4
.
Comparer V
1
(0), V
1
() et V
2
(). Vrier que pour = 1/2, ces 3 valeurs
sont respectivement proportionnelles 9, 15.76 et 30.25.
3. On note N = n
d
et V
d
= V ar(X
N
) o X
N
= N
1
t1,2,...,n]
d
X
t
;
montrer que :
V
d
() = Var(X
N
) =
2
N
2
_
n
1 +
1
2
1
2
+ o
n
(1)
_
d
.
Comparer la largeur des intervalles de conance pour m sous -corrlation
et sous indpendance.
1.2. Trois prvisions pour un AR factorisant sur Z
2
.
Soit X un champ gaussien stationnaire centr sur Z
2
, de covariance C(h) =
|h|
1
. On considre les trois prdictions suivantes de X
0
:
1. La prdiction par 0 = E(X
0
)
2. La prdiction causale optimale SAR partir de X
1,0
, X
0,1
et X
1,1
3. La prdiction optimale CAR partir des X
t
, t ,= 0
Expliciter les deux derniers prdicteurs. Vrier que pour = 1/2, les
variances derreurs de prdiction sont respectivement proportionnelles 1,
0.5625 et 0.36.
1.3. Formule de Krige.
Soit X = X
t
, t R
d
un champ stationnaire centr de L
2
, de covariance C.
Pour V B
b
(R
d
) un borlien born, on note :
X(V ) =
1
(V )
_
V
X(z)dz et C(u, U) =
1
(u)(U)
_
u
_
U
C(y z)dydz
o u, U B
b
(R
d
) sont de volumes (u) et (U) > 0.
1.9 Prdiction covariance connue 49
1. La variance dextension de X de v V est
2
E
(v, V ) = V ar(X(v)X(V )) :
cest la variance derreur de prdiction de X(V ) par
X(V ) = X(v). Vrier
que
2
E
(v, V ) = C(v, v) +C(V, V ) 2C(v, V ).
2. On suppose que D R
d
est partitionn en I sous-domaines V
i
, chaque
V
i
tant son tour divis en J sous-domaines v
ij
isomtriques entre eux,
de telle sorte que lon passe dune partition de V
i
une partition de V
j
par une translation. On note v la forme gnratrice commune des v
ij
et
V celle de V
i
. Notant X
ij
= X(v
ij
) et X
i
=
1
J
J
j=1
X
ij
, on dnit la
variance empirique de dispersion et la variance de dispersion de X de v
dans V , v V , par :
s
2
(v [ V ) =
1
J
J
j=1
(X
ij
X
i
)
2
et
2
(v [ V ) = Es
2
(v [ V )).
(a) Vrier que
2
(v [ V ) = C(v, v) C(V, V ).
(b) Dmontrer que
2
(v [ D) =
2
(v [ V ) +
2
(V [ D).
1.4. Une condition susante de s.d.p. pour une matrice.
1. Vrier que C est s.d.p. si C est diagonalement dominante, c--d, si pour
tout i : C
ii
j:j,=i
[C
ij
[.
2. Ecrire cette condition pour les deux covariances :
(a) C(i, j) =
]ij]
sur Z.
(b) C(i, j) = 1 si i = j, si |i j|
= 1 et 0 sinon, sur Z
d
.
Montrer que la condition susante 1 nest pas ncessaire.
1.5. Covariance produit, restriction et extension dune covariance.
1. Montrer que si C
k
(), k = 1,
s,t=1,3
d sont des covariances stationnaires
sur R
1
, la fonction C(h) =
d
k=1
C
k
(h
k
) est une covariance sur R
d
.
2. Montrer que si C est une covariance sur R
d
, alors C est une covariance
sur tout sous-espace vectoriel de R
d
.
3. On considre la fonction C
0
(h) = (1 [h[/
2)1[h[
2 sur R.
(a) Dmontrer que C
0
est une covariance sur R.
(b) Posant pour (i, j) A = 1, 2, . . . , 7
2
, s
ij
= (i, j) et a
ij
= (1)
i+j
,
vrier que
(i,j),(k,l)A
a
ij
a
kl
C
0
(|s
ij
s
kl
|) < 0. En dduire que
C(h) = C
0
(|h|) nest pas une covariance sur R
2
.
(c) Vrier que
u,v0,1]
d
(1)
|u|
1
+|v|
1
C
0
(|u v|) < 0 si d 4. En
dduire que C(h) = C
0
(|h|) nest pas une covariance sur R
d
si d 4.
(d) Dmontrer que C(h) = C
0
(|h|) nest pas une covariance sur R
3
. En
dduire quaucune extension isotropique de C
0
nest une covariance
sur R
d
si d 2.
50 1 Modle spatial du second ordre et gostatistique
1.6. Champ du
2
.
1. Si (X, Y ) est un couple gaussien, dmontrer que :
Cov(X
2
, Y
2
) = 2Cov(X, Y )
2
.
(si (X, Y, Z, T) est un vecteur gaussien de R
4
, alors
E(XY ZT) = E(XY )E(ZT) +E(XZ)E(Y T) +E(XT)E(Y Z).
2. Si X
1
, . . . , X
n
sont n champs gaussiens i.i.d. centrs, stationnaires sur
R
d
, de covariance C
X
, dmontrer que le champ Y dni par
Y = Y
s
=
n
i=1
[X
i
s
]
2
, s R
d
est stationnaire de covariance C
Y
(h) = 2nC
X
(h)
2
.
1.7. Proprit de Markov de la covariance exponentielle.
On considre X un processus stationnaire sur R de covariance C(t) =
2
]t]
o [[ < 1. X est observ en n sites s
1
< s
2
< . . . < s
n
.
1. Dmontrer que si s
0
< s
1
, le krigeage de X en s
0
est
X
s0
=
s1s0
X
s1
.
2. Dmontrer que si s
k
< s
0
< s
k+1
, le krigeage
X
s0
dpend uniquement de
X
s
k
et X
s
k+1
et expliciter ce krigeage.
1.8. Pour X = (X
t
, t R) stationnaire et de covariance C, on observe :
X
0
= 1 et X
1
= 1. Montrer que le krigeage simple vaut
X
s
=
C(s 1) C(s)
C(0) C(1)
et que la variance de lerreur de prdiction en s est
2
(s) = C(0)
_
1
(C(s) +C(s 1))
2
C(0)
2
C(1)
2
_
+ 2
C(s)C(s 1)
C(0) C(1)
Tracer les courbes s
X
s
et s
2
(s) pour s [3, 3] si C est la cova-
riance de Matrn de paramtres C(0) = 1, a = 1, = 1/2 (resp. = 3/2).
Commenter les graphiques.
1.9. Modles corrlation nulle distance > 1.
On considre X = (X
t
, t Z) un processus stationnaire de corrlation dis-
tance 1 et de corrlation 0 distance > 1. On note X(n) =
t
(X
1
, X
2
, . . . , X
n
)
et
n
= Cov(X(n)).
1. A quelle condition sur ,
3
est-elle s.d.p. ? Mme question pour
4
.
2. Dterminer la fonction de corrlation dun processus MA(1) : X
t
=
t
+
a
t1
, tant un BBf. En dduire que la condition [[ 1/2 assure que,
pour tout n 1,
n
est s.d.p.
1.9 Prdiction covariance connue 51
3. Dterminer le krigeage de X
0
sur X
1
, X
2
. Mme question si :
(a) E(X
t
) = m est inconnue.
(b) E(X
t
) = a t.
4. Se poser vous des questions analogues si X = (X
s,t
, (s, t) Z
2
) est unchamp
stationnaire corrl distance (euclidienne) 1 et 0 distance >1.
1.10. Si X
s
= m +
s
o
s
, s S est un processus intrinsque de vario-
gramme 2, expliciter les prdictions de krigeage (1.36) et les variances de
krigeage (1.37) en fonction de .
1.11. On considre le processus X
s
= cos(U + sV ), s R, o U est une loi
uniforme |(0, 2) et V est une variable de Cauchy sur R (de densit 1/(1 +
x
2
)), U et V tant indpendantes. Vrier que E(X
s
) = 0 et Cov(X
s
, X
t
) =
2
1
exp[s t[. En dduire que les trajectoires de X sont indniment
drivables mais que X nest pas drivable dans L
2
.
1.12. Modle CAR frontire.
Dmontrer que lquation X
t
=
1
d
s:|st|
1
=1
X
s
+e
t
dnit un CAR sur Z
d
si et seulement si d 3.
1.13. Expliciter les reprsentations CAR des modles SAR suivants (graphe,
coecients, facteur de rduction de variance
2
) :
1. X
s,t
= aX
s1,t
+bX
s,t1
+cX
s+1,t1
+
s,t
pour (s, t) Z
2
.
2. X
s,t
= a(X
s1,t
+X
s+1,t
)+b(X
s,t1
+X
s,t+1
)+c(X
s1,t1
+X
s+1,t+1
)+
s,t
pour (s, t) Z
2
.
3. X
t
= aX
t1
+bX
t+2
+
t
pour (s, t) Z.
1.14. Simulations dun modle SAR factorisant sur Z
2
.
On considre le modle gaussien centr SAR factorisant :
X
s,t
= X
s1,t
+X
s,t1
X
s1,t1
+
s,t
, 0 < , < 1.
Si V ar() =
2
= (1
2
)(1
2
), la covariance de X vaut C(s, t) =
]s]
]t]
. On propose trois mthodes de simulation X sur le rectangle S =
0, 1, 2, . . . , n 1 0, 1, 2, . . . , m 1, la premire et la dernire mthodes
fournissant une simulation exacte :
1. partir de la dcomposition de Choleski de =
1
2
: prciser cette
dcomposition et lalgorithme de simulation.
2. En utilisant lchantillonneur de Gibbs pour le CAR associ (cf. 4.2 ;
prciser le modle CAR associ et lalgorithme de simulation).
3. partir dune rcursion dnissant de faon exacte X sur S : soit W le
drap brownien sur (R
+
)
2
(cf. (1.1)) et les variables
Z
s,0
=
s
W([0,
2s
] [0, 1]) pour s = 0, . . . , n 1, et
Z
0,t
=
t
W([0, 1] [0,
2t
]) pour t = 0, . . . , m1.
Vrier que Z a la mme covariance que X sur les deux axes. En dduire
une mthode de simulation exacte de X sur une sous-grille de S.
52 1 Modle spatial du second ordre et gostatistique
1.15. Equations de Yule-Walker.
Ecrire les quations de Yule-Walker pour les modles stationnaires admettant
pour d.s. :
1. f(u
1
, u
2
) =
2
(1 2a cos u
1
2b cos u
2
)
2. g(u
1
, u
2
) = (1 + 2 cos u
1
)f(u
1
, u
2
)
1.16. Identier sous la forme dune srie la variance du modle CAR isotro-
pique aux 4-ppv sur Z
2
de paramtre a, [a[ < 1/4. Dterminer la corrlation
distance 1 de ce mme modle et tracer la courbe de corrlation a (a).
Mme question en dimension d = 1 pour [a[ < 1/2.
1.17. Comportement dun CAR sa frontire paramtrique.
1. On considre le CAR isotropique aux 4-ppv sur Z
2
de paramtre a =
1/4 avec 0. Quelle quation vrie
=
X
(1, 0) ? Montrer que
1
(/2)(log )
1
au voisinage de 0 pour . Pour quelles valeurs
de a obtient-on :
= 0.9, 0.95, 0.99 ?
2. Mener la mme tude pour le modle isotropique aux 2-ppv sur Z
1
. Com-
parer les comportements de () pour petit pour d = 1 et d = 2.
1.18. Trace sur Z
1
dun champ markovien sur Z
2
.
Soit X le CAR isotropique aux 4-ppv sur Z
2
. Quelle est la d.s. du processus
un paramtre X
s,0
, s Z ? Cette trace sur Z reste-t-elle markovienne ?
1.19. Modle gaussien changeable sur S = {1,2,. . . ,n}.
On considre le modle SAR sur R
n
:
X = JX +,
o est un BB gaussien et J est la matrice n n de coecients J
ij
= 1 si
i ,= j, J
ii
= 0 sinon. On notera que lensemble aI + bJ, a, b R est stable
par multiplication et par inversion ds que aI +bJ est inversible.
1. A quelle condition sur le modle est-il bien dni ? Montrer que
Cov(X) = r
0
I +r
1
J et identier r
0
et r
1
.
2. Identiant et Cov(e), vrier que X admet la reprsentation CAR :
X = JX +e.
1.20. Choisir X un SAR gaussien non-stationnaire sur un ensemble de sites
S = 1, 2, . . . , n et expliciter sa reprsentation CAR : graphe, lois condition-
nelles, loi globale, prdiction de X
i
partir des autres observations.
1.21. Deux modles SARX avec covariables.
Soit Y une matrice (np) de covariables dterministes inuenant une variable
spatiale X R
n
, W une matrice de contigut spatiale sur S = 1, 2, . . . , n
et un bruit blanc gaussien de variance
2
. Le modle dcalage spatial est
le modle SAR : X = Y + WX + , incluant lexogne Y et le modle
1.9 Prdiction covariance connue 53
de Durbin est un SAR sur les rsidus : X Y = W(X Y ) + . Si
I W est inversible, expliciter la loi de X pour chaque modle. Comment
sont modis les rsultats si est lui-mme un modle SAR, = +e o
est une matrice de proximit connue et e un BBG de variance
2
e
? Expliciter
les log-vraisemblances des dirents modles.
2
Champ de Gibbs-Markov sur rseau
Dans tout ce chapitre, X = (X
i
, i S) est un champ alatoire dni sur un
ensemble discret de sites S et valeur dans = E
S
o E est une espace dtat
gnral. Le rseau discret S peut tre ni ou non, rgulier (S Z
2
en imagerie,
radiographie) ou non (cantons dune rgion en pidmiologie). Nous noterons
la loi de X ou encore sa densit. A la dirence dune description de X par
certaines caractristiques globales (par exemple sa moyenne, sa covariance),
nous nous intressons ici dcrire partir de ses lois conditionnelles, ce
qui est utile si le phnomne observ est dcrit par ses comportements condi-
tionnels locaux. En particulier, nous rpondrons la question : tant donne
une famille
i
([x
i
), i S de lois sur E indexes par la conguration x
i
de
x extrieure i, quelle condition ces lois sont-elles les lois conditionnelles
dune loi jointe ?
Rpondre par larmative cette question permet de spcier, partielle-
ment ou totalement, une loi jointe partir de ses lois conditionnelles. De
plus, si la dpendance de
i
([x
i
) est locale, la complexit du modle sen
trouvera fortement rduite : on dira alors que X est un champ de Markov.
Sans condition, en gnral des lois conditionnelles
i
ne se recollent pas.
Nous commencerons par dcrire une famille gnrale de lois conditionnelles,
les spcications de Gibbs, qui se recollent sans condition ; une spcication de
Gibbs est caractrise par des potentiels. Limportance des modles de Gibbs
est renforce par le thorme de Hammersley-Cliord qui dit quun champ de
Markov est un champ de Gibbs avec des potentiels locaux. Les auto-modles
markoviens (AMM) de Besag forment une sous-classe de champs de Markov
particulirement simples et utiles en statistique spatiale.
Contrairement aux modles du second ordre pour lesquels E = R ou R
p
(cf. Ch. 1), lespace dtat E dun champ de Gibbs-Markov peut tre gnral,
quantitatif, qualitatif, voire mixte. Par exemple, E = R
+
pour un champ
valeur positive (champ exponentiel ou Gamma), E = N pour une variable de
comptage (champ poissonnien en pidmiologie), E = a
0
, a
1
, . . . , a
m1
pour
un champ catgoriel (rpartition spatiale de m espces vgtales en cologie),
E = 0, 1 pour un champ binaire (prsence/absence dune maladie, dune
56 2 Champ de Gibbs-Markov sur rseau
espce), E = R
p
pour un champ croisant un label catgoriel avec une
modalit quantitative multivarie x (en tldtection, est une texture de
paysage et x une signature multispectrale), E = 0]0, +[ pour un tat
mixte (en pluviomtrie, X = 0 sil ne pleut pas, X > 0 sinon), sans liminer
E = R ou E = R
p
pour un champ gaussien. On supposera que lespace dtats
mesurable (E, c) est muni dune mesure de rfrence > 0, c tant la tribu
borlienne et la mesure de Lebesgue si E R
p
, c tant lensemble des
parties de E et la mesure de comptage si E est discret. Les dnitions et
les rsultats de ce chapitre stendent sans dicult au cas despaces dtats
E
i
ventuellement dirents suivant les sites i S.
2.1 Recollement de lois conditionnelles
Sans condition, des lois conditionnelles
i
ne se recollent pas. Lexercice 2.3,
qui utilise un argument de dimension paramtrique, est une faon simple de le
voir. Une autre approche consiste examiner la condition tablie par Arnold
et al. [8] qui garantit que deux familles de lois conditionnelles (X[y) et (Y [x),
tats x S(X) et y S(Y ) se recollent : soient et deux mesures de
rfrence sur S(X) et S(Y ), a(x, y) la densit de (X = x[y) relativement
, b(x, y) celle de (Y = y[x) relativement , N
a
= (x, y) : a(x, y) > 0
et N
b
= (x, y) : b(x, y) > 0 ; alors, les deux familles se recollerons ssi
N
a
= N
b
(= N) et si :
a(x, y)/b(x, y) = u(x)v(y), (x, y) N, (2.1)
o
_
S(X)
u(x)(dx) < .
Cette condition de factorisation est ncessaire puisque les densits condi-
tionnelles scrivent a(x, y) = f(x, y)/h(x) et b(x, y) = f(x, y)/k(y) si f, h et
k sont les densits de (X, Y ), X et Y . Rciproquement, il sut de vrier que
f
(x, y) = b(x, y)u(x) est, une constante multiplicative prs, une densit
dont les conditionnelles sont a et b.
Ainsi, les lois gaussiennes (X[y) ^(a +by,
2
+
2
y
2
) et (Y [x) ^(c +
dx,
t2
+
t2
x
2
),
2
et
t2
> 0, ne se recollent pas si
t
,= 0 ; si =
t
=
0, les lois se recolleront si d
2
= b
2
, la loi jointe tant gaussienne. Nous
reviendrons sur cet exemple qui entre dans la classe des auto-modles gaussiens
(cf. 2.4.2) ou encore des CAR tudis au Ch. 1 (cf. 1.7.3). Un exemple de lois
conditionnelles gaussiennes qui se recollent en une loi jointe non-gaussienne
est examin lexercice (2.4, cf. [8]).
Un autre exemple de lois conditionnelles qui se recollent est celui des lois
auto-logistiques sur E = 0, 1 : les lois
i
(x
i
[x
i
) =
exp x
i
(
i
+
j,=i
ij
x
j
)
1 + exp(
i
+
j
ij
x
j
)
, i S, x
i
0, 1
2.2 Champ de Gibbs sur S 57
se recollent sur = 0, 1
S
condition que
ij
=
ji
pour tout i ,= j. Dans
ce cas, la loi jointe associe est celle dun modle auto-logistique (cf. 2.4)
dnergie jointe :
(x) = C exp
iS
i
x
i
+
i,jS, i<j
ij
x
i
x
j
.
La dtermination des conditions assurant le recollement de lois condition-
nelles nest pas simple [8]. Pour le comprendre, xons x
= (x
1
, x
2
, . . . , x
n
)
un tat de rfrence de E
S
et supposons que admet =
i
comme lois
conditionnelles ; alors (lemme de Brook [35]) :
(x
1
, . . . , x
n
)
(x
1
, . . . , x
n
)
=
n1
i=0
(x
1
, . . . , x
i
, x
i+1
, x
i+2
, . . . , x
n
)
(x
1
, . . . , x
i
, x
i+1
, x
i+2
, . . . , x
n
)
=
n1
i=0
i
(x
i+1
[x
1
, . . . , x
i
, x
i+2
, . . . , x
n
)
i
(x
i+1
[x
1
, . . . , x
i
, x
i+2
, . . . , x
n
)
.
Cette identit montre que si les lois
i
se recollent en , peut tre reconstruite
partir des
i
. Mais cette reconstruction doit tre invariante, dune part par
permutation des coordonnes (1, 2, . . . , n), dautre part vis--vis du choix de
ltat de rfrence x
: ces invariances traduisent les contraintes sur les
i
qui assurent la cohrence des lois conditionnelles.
Venons-en ltude des champs de Gibbs qui sont dnis par des lois
conditionnelles se recollant sans conditions.
2.2 Champ de Gibbs sur S
On suppose dans ce paragraphe que lensemble des sites S est dnombrable,
typiquement S = Z
d
si S est rgulier. Notons o = T
F
(S) la famille des parties
nies de S, x
A
= (x
i
, i A) la conguration de x sur A, x
A
= (x
i
, i / A)
celle lextrieur de A, x
i
= x
i]
celle en dehors du site i,
A
= x
A
, y
et
A
= x
A
, x . Notons T = c
S
la tribu sur et dx
la mesure
(dx
) sur (E
, c
) restreinte
.
2.2.1 Potentiel dinteraction et spcication de Gibbs
Un champ de Gibbs est associ une famille
de lois conditionnelles dnies
partir de potentiels dinteraction .
Dnition 2.1. Potentiel, nergie admissible et spcication de Gibbs
1. Un potentiel dinteraction est une famille =
A
, A o dapplications
mesurables
A
:
A
R telle que, pour toute partie o, la somme
suivante existe,
58 2 Champ de Gibbs-Markov sur rseau
U
(x) =
AS:A,=
A
(x). (2.2)
U
est lnergie de sur ,
A
le potentiel sur A.
2. Le potentiel est admissible si pour tout o et tout y
,
Z
(x
) =
_
exp U
(x
, x
)dx
< +.
3. Si est admissible, la spcication de Gibbs
associe est la famille
([x
) ; T
F
(S), x
de lois conditionnelles
([x
)
de densit par rapport
(x
[x
) = Z
(x
)
1
exp U
(x), o.
La famille
est cohrente car si
, la loi conditionnelle
sobtient
par restriction de la loi conditionnelle
. La sommabilit (2.2) est assure
si (S, d) est un espace mtrique et si le potentiel est de porte borne, c--d sil
existe R > 0, tel que
A
0 ds que le diamtre de A, (A) = sup
i,jA
d(i, j),
dpasse R; en eet, dans ce cas, seul un nombre ni de potentiels
A
,= 0
contribue lnergie U
.
Spcication conditionnelle
et mesures de Gibbs (()
Une mesure de Gibbs associe au potentiel est une loi sur (, T) dont
les lois conditionnelles concident avec
: on note ((). Si S est ni,
(x) =
S
(x) et (() = . Si S est inni se pose la question de savoir si il y
a existence et/ou lunicit dune loi globale de spcication
. Ceci nest pas
assure sans hypothses particulires et rpondre cette question est lun des
objets de la mcanique statistique (cf. [85]). Pour un espace dtat trs gnral
E (E est polonais, par exemple un borlien de R
d
, un compact dun espace
mtrique, un ensemble ni) et si la mesure est nie, Dobrushin [66] a montr
que (() ,= : il existe au moins une loi globale de spcication
. Mais cette
loi nest pas ncessairement unique : si (() > 1, on dit quil y a transition de
phase, deux lois direntes pouvant tre les mmes lois conditionnelles. Ainsi,
sur un rseau S inni, une spcication de Gibbs ne spcie pas ncessairement
le modle de loi jointe sur S. Cette remarque explique lune des dicults
rencontre en statistique asymptotique des champs de Gibbs. Dobrushin [66]
a donn une condition susante assurant lunicit de la mesure de Gibbs
associe
(cf. aussi [85] et B.2).
Identiabilit du potentiel
Sans contrainte, la correspondance
nest pas identiable : par
exemple, pour toute constante c, si un potentiel
A
est modi en
A
=
A
+c,
alors
; en eet, augmenter lnergie dune constante c ne modie pas
2.2 Champ de Gibbs sur S 59
la loi conditionnelle
. Une faon de rendre cette correspondance identiable
est la suivante : xons un tat de rfrence de E; alors, les contraintes
suivantes rendent identiable :
A ,= ,
A
(x) = 0 si pour un i A, x
i
= . (2.3)
Ce rsultat est une consquence de la formule dinversion de Mobius,
A
(x
A
) =
V A
(1)
(A\V )
U(x
A
,
A
), (2.4)
formule qui associe univoquement lnergie U des potentiels vriant (2.3).
Dans la terminologie de lanalyse de la variance, on dit que les
A
sont les
A-interactions dans la dcomposition de U ; par exemple, pour S = 1, 2,
cette dcomposition scrit U U(, ) =
1
+
2
+
12
o
1
(x) = U(x, ) U(, ),
2
(y) = U(, y) U(, ),
1,2
(x, y) = U(x, y) U(x, ) U(, y) +U(, ).
1
est leet principal du premier facteur (le potentiel associ 1),
2
celui
associ au deuxime facteur (le potentiel associ 2) et
1,2
linteraction
dordre 2.
2.2.2 Exemples de spcication de Gibbs
Modliser un champ partir dun potentiel =
A
, A (, o ( est une
famille de parties nies de S, requiert lexpertise du spcialiste. Les paramtres
du modle sont dune part les parties A ( indexant le potentiel , dautre
part les fonctions potentiels
A
pour A (. Si les
A
prennent la forme
paramtrique
A
(x) =
A
A
(x), o les
A
sont des fonctions relles connues,
appartient la famille exponentielle,
(x) = Z
1
() exp
t
T(x) ,
de paramtre = (
A
, A () et de statistique exhaustive T(x) = (
A
(x),
A (). Disposer dexpressions explicites pour les lois conditionnelles permet :
1. Dutiliser des algorithmes markoviens MCMC de simulation tel lchan-
tillonneur de Gibbs ou lalgorithme de Metropolis (cf. Ch. 4).
2. De recourir des mthodes destimation par pseudo-vraisemblance condi-
tionnelle (PV C) faciles mettre en oeuvre tout en gardant de bonnes
proprits asymptotiques l o le maximum de vraisemblance (MV ) est
plus dicile mettre en oeuvre (cf. Ch. 5 et 5.4.2).
Modles dIsing sur S Z
2
Introduit par les physiciens pour modliser des congurations de spins E =
1, +1 sur un rseau S, ces modles tats binaires sont classiquement
utiliss en imagerie et en statistiques avec lespace dtat E
= 0, 1. Ils
peuvent tre dnis sur un rseau rgulier ou non.
60 2 Champ de Gibbs-Markov sur rseau
Modle isotropique aux 4-plus proches voisins (not 4-ppv) sur Z
2
Les seuls potentiels non-nuls sont les potentiels de singletons
i]
(x) = x
i
,
i S et les potentiels de paires
i,j]
(x) = x
i
x
j
si i et j sont voisins
distance 1, |i j|
1
= [i
1
j
1
[ + [i
2
j
2
[ = 1. Notant i, j) cette relation de
voisinage, la spcication conditionnelle sur nie est dnergie :
U
(x
[x
) =
i
x
i
+
i, jS : i,j)
x
i
x
j
,
Quant la loi conditionnelle
, elle scrit :
(x
[x
) = Z
1
(, ; x
) exp U
(x
; x
),
o
Z(, ; x
) =
xE
exp U
(x
; x
).
Linterprtation des paramtres est la suivante : rgle la loi marginale et
la corrlation spatiale. Si = 0, les congurations marginales Y
i
= +1 et
Y
i
= 1 sont quiprobables, > 0 renforant la probabilit dapparition
de +1, < 0 celle de 1. est un paramtre de dpendance spatiale :
= 0 correspondant lindpendance des Y
i
, > 0 favorise lapparition
de congurations voisines gales, et < 0 celle de congurations voisines
opposes. Par exemple, la ralisation dun modle de paramtres = 0 et
positif assez grand sera constitue de plages de +1 et de 1 gomtriquement
rgulires, dautant plus rgulires que est grand ; la ralisation pour
ngatif grand ressemblera elle un damier rgulier altern de +1 et de 1,
dautant plus rgulier que [[ est grand.
La constante de normalisation Z
(, ; x
), somme de 2
termes, est
incalculable si grand. Ceci pose un problme tant pour la simulation de
Y sur que pour lestimation du modle par maximum de vraisemblance,
la constante Z
incorporant le paramtre (, ) estimer. Par exemple, si
est le (petit) carr 10 10, 2
100
1.27 10
30
termes contribuent Z
! Par
contre, la loi conditionnelle en un site i est facile expliciter, dpendant de
la conguration aux 4-ppv :
i
(x
i
[x
i
) = (x
i
[x
i
) =
expx
i
( +v
i
(x))
2ch( +v
i
(x))
o v
i
(x) =
j:i,j)
x
j
. Il est facile de vrier que la paramtrisation de ([)
en (, ) est propre, deux jeux de paramtres dirents conduisant deux fa-
milles ([) direntes. Lespace dtat tant ni, (() ,= : il existe toujours
une loi globale de spcication (). Mais cette loi nest pas toujours unique :
par exemple, pour = 0, elle nest unique que si <
c
= log(1 +
2)/4
(Onsager [166] ; Georgii [85]). Si = 0 et >
c
, il y a plusieurs lois avec la
mme spcication conditionnelle : il y a transition de phase.
2.2 Champ de Gibbs sur S 61
(a) (b) (c)
Fig. 2.1. Simulation dun modle dIsing isotropique et aux 4-ppv sur {1, . . . , 100}
2
par chantillonneur de Gibbs aprs 3000 iterations : = 0 et (a) = 0.2, (b)
= 0.4, (c) = 0.8. Les simulations sont ralises avec le logiciel AntsInFields.
Modle dIsing sur une partie nie S Z
2
Pour le mme potentiel, le modle global existe toujours et il est unique.
Le modle sur le tore S = T
2
= 1, 2, . . . , m
2
est obtenu en consid-
rant que la relation de voisinage est dnie modulo m, savoir : i, j)
[i
1
j
1
[ +[i
2
j
2
[ 1 (modulo m). La Fig. 2.1 donne trois ralisations dun
modle dIsing isotropique aux 4-ppv sur le tore 100 100 : = 0 assure que
les deux modalits +1 et 1 sont quiprobables ; (b) et (c) correspondent,
pour un rseau inni, des situations de transition de phase. Ces simula-
tions sont obtenues en utilisant le logiciel AntsInFields (cf. Winkler [224] et
www.antsinfields.de).
Lespace binaire E
= 0, 1 correspond des modalits dabsence (x
i
= 0)
ou la prsence (x
i
= 1) dune espce (dune maladie) au site i. La bijection
y
i
2x
i
1 de E
sur E = 1, +1 et la correspondance a = 2 8 et
b = 4 associe au modle dIsing en y E le modle en x E
(x
[x
) = Z
1
(a, b, x
) expa
ixi
+b
i, jS: i,j)
x
i
x
j
.
Les modalits 0 et 1 sont quiprobables si a +2b = 0, a +2b > 0 favorisant la
modalit 1, a +2b < 0 favorisant 0. Linterprtation de b est identique celle
de pour un modle dIsing, b > 0 correspondant une coopration, b < 0
une comptition et b = 0 une indpendance spatiale.
Gnralisations du modle dIsing
Les gnralisations du modle dIsing couvrent un large spectre de situations
relles.
1. On peut introduire une anisotropie en prenant un paramtre
H
pour les
voisins horizontaux et
V
pour les voisins verticaux.
62 2 Champ de Gibbs-Markov sur rseau
2. Un modle non-stationnaire a pour potentiels
i]
(x) =
i
x
i
,
i,j]
(x) =
i,j]
x
i
x
j
,
les
i
,
i,j]
dpendant de i et de (i, j) et/ou sexplicitant partir de
poids connus et/ou de variables exognes observables. Un exemple sur Z
2
est le modle log-linaire de potentiels,
i]
(x) = +
1
i
1
+
2
i
2
+
t
z
i
,
i,j]
(x) = x
i
x
j
,
o i = (i
1
, i
2
).
3. La relation de voisinage i, j) peut tre associe un graphe ( gnral
symtrique et sans boucle : par exemple, sur Z
2
, le graphe aux 8 ppv est
dni par la relation de voisinage : i, j) si |i j|
1, o |(u, v)|
=
max[u[ , [v[. La Fig. 2.2 donne la ralisation de 3 textures binaires at
aux 8 plus proches voisins pour dirents choix des paramtres locaux.
4. On peut envisager des potentiels au-del des paires : par exemple, pour un
champ de Gibbs aux 8-ppv, on peut introduire des potentiels de triplets
i, j, k et des potentiels de quadruplets i, j, k, l pour des ensembles de
sites mutuellement voisins.
5. Le nombre dtats peut tre augment que les tats soient qualitatifs (mo-
dle de Potts) ou quils soient quantitatifs (niveaux de gris en imagerie).
6. Enn, ces modles peuvent tre dnis sur des rseaux S gnraux sans
condition de rgularit ds que S est muni dun graphe de voisinage (.
Dautres exemples de textures relles (ajustement et simulation) sont pr-
sentes au Ch. 5 (cf. Fig. 5.13). Ils illustrent la grande varit de congurations
que ces modles peuvent engendrer et leur utilit pour la synthse de motifs
rels (cf. [224]).
0.0 1.0 0.0
1.0 2.0 1.0
0.0 1.0 0.0
3.0 1.0 0.0
1.0 0.0 1.0
0.0 1.0 3.0
0.4 0.4 0.4
0.4 0.0 0.4
0.4 0.4 0.4
Fig. 2.2. Trois textures binaires E = {1, +1} aux huit plus proches voisins sur
{1, . . . , 150}
2
: les simulations sont obtenues par chantillonneur de Gibbs aprs 3000
iterations. Sous chaque texture est gur le modle local relatif au pixel central et les
valeurs des paramtres. Les simulations sont ralises avec le logiciel AntsInFields.
2.2 Champ de Gibbs sur S 63
Modle de Potts
Ce modle, ou modle de Strauss [207], gnralise le modle dIsing un espace
K 2 tats qualitatifs E = a
0
, a
1
, . . . , a
K1
(des couleurs, des textures,
des qualits). Ses potentiels sont :
i]
(x) =
k
, si x
i
= a
k
,
i,j]
(x) =
k,l
=
l,k
, si x
i
, x
j
= a
k
, a
l
pour i, j voisins.
Ces modles sont utiliss en particulier comme modles a priori en segmenta-
tion baysienne dimages. Si S est ni, lnergie associe vaut :
U(x) =
k
n
k
+
k<l
kl
n
kl
, (2.5)
o n
k
est le nombre de sites de modalit a
k
, n
kl
le nombre de sites voisins de
modalits a
k
, a
l
. Pour un tel modle, plus
k
est important, plus la modalit
a
k
est marginalement probable ; quant
kl
, il contrle la vraisemblance de
la conguration a
k
, a
l
en des sites voisins. Par exemple, pour interdire la
conguration a
k
, a
l
en des sites voisins, on prendra
kl
> 0 et grand ; si
on veut que marginalement a
k
soit plus frquent que a
l
, on prendra
k
>
l
.
Tels quels, les paramtres (, ) ne sont pas identiables : prenant = a
0
comme tat de rfrence, les contraintes :
0
= 0 et, pour tout k,
0,k
= 0,
rendent le potentiel identiable. Sil y a changeabilit des K modalits,
c--d si pour tout k ,= l,
k
et
kl
, le modle dpendra du seul
paramtre dinteraction :
(x) = Z
1
expn(x), (2.6)
o n(x) est le nombre de paires de sites voisins de mme modalit ; en eet
k
k
n
k
n est une constante indpendante de x et
k<l
kl
n
kl
(N
n(x)) o N, le nombre total dartes du graphe de voisinage, ne dpend pas
de la ralisation x. En reconstruction baysienne dimage, joue le rle dun
paramtre de rgularisation : plus sera grand et ngatif, plus les plages de
label constant reconstruites seront gomtriquement rgulires (cf. Fig. 2.3).
Exemple 2.1. Rle du paramtre de rgularisation en imagerie baysienne
Un objectif central du traitement dimage ou du traitement du signal est
la reconstruction dun objet x connu au travers dune observation bruite
y = (y, e). Les mthodes baysiennes consistent modliser a priori x puis
proposer une reconstruction x obtenue partir de sa loi a postriori ([y)
(cf. larticle pionnier des frres Geman [82] et Gyon [96] ; Chalmond [42] ;
Winkler [224]). Plusieurs mthodes sont possibles. Le MAP, ou maximum a
posteriori, retient,
x = argmax
x
(x[y),
64 2 Champ de Gibbs-Markov sur rseau
(a) (b) (c)
Fig. 2.3. Modle de Potts 3 niveaux de gris changeables sur {1, . . . , 200}
2
: (a)
= 0.5, (b) = 0.6, (c) = 0.7. La simulation est ralise par chantillonneur
de Gibbs avec 3000 itrations. Les simulations sont ralises avec le logiciel AntsIn-
Fields.
o ([y) est la loi conditionnelle de X sachant y. La loi de formation de
Y partir de x est connue si le processus de dgradation est bien identi.
Par contre, celle de X, indispensable au calcul de la loi a posteriori ([y),
ne lest pas en gnral. Cest la raison pour laquelle on va choisir une loi a
priori (x) pour X. Cette tape, en partie ad hoc, ncessite lexpertise de
spcialistes du problme considr. Une fois choisie , la loi jointe (X, Y ) et
la loi conditionnelle de (X[y) valent respectivement
(x, y) = (y[x)(x) et (x[y) =
(y[x)(x)
(y)
,
et la restauration MAP de x est :
x
MAP
= argmax
x
(y[x)(x).
La Fig. 2.4 illustre un exemple simul dune telle reconstruction : (a) est
limage binaire x de taille 64 64 reconstruire ; (b) est lobservation y de x
dgrade par un bruit de transmission i.i.d., P(Y
i
= X
i
) = 1 P(Y
i
,= X
i
) =
p = 0.25. La loi de formation de y est donc,
(y[x) = c exp
_
n(y, x) log
1 p
p
_
,
o n(y, x) =
iS
1(y
i
= x
i
). On choisit comme a priori sur x la loi de Potts
(2.6) deux modalits changeables de paramtre . On obtient alors :
(x[y) = c(y) exp
_
n(x) +n(y, x) log
1 p
p
_
.
La maximisation de (x[y) se faisant en x, il nest pas ncessaire de connatre
la constante de normalisation c(y) et
2.2 Champ de Gibbs sur S 65
(a) (b)
(c) (d) (e)
Fig. 2.4. Reconstruction baysienne dune image bruite : (a) image originale x;
(b) image bruite 25 %; reconstructions MAP exactes avec : (c) = 0.3 ; (d)
= 0.7 ; (e) = 1.1. (Greig et al. [94], reproduite avec la permission de Blackwell
Publishing.)
x
MAP
= argmax
x0,1]
S
_
n(x) +n(y, x) log
1 p
p
_
.
Pour rsoudre ce problme doptimisation combinatoire, Greig et al. [94] uti-
lisent un algorithme exact de Ford-Fulkerson l o un algorithme approch
possible est celui du recuit simul [82; 96; 224]. Les images 2.4-c, 2.4-d et 2.4-e
donnent respectivement les reconstructions MAP exactes pour des valeurs
croissantes = 0.3 puis 0.7 et enn 1.1. Plus le paramtre de rgularisation
est grand, plus les deux plages reconstruites sont rgulires, au point que,
pour = 1.1, seule la plage noire subsiste !
Spcication gaussienne sur S = 1, 2, . . . , n
Si
1
= Q existe, une loi gaussienne X = (X
i
, i S) ^
n
(, ) est un
champ de Gibbs dnergie,
U(x) =
1
2
t
(x )Q(x ),
de potentiels de singletons
i]
et de paires
i,j]
:
i]
(x) = x
i
j:j,=i
q
ij
j
1
2
q
ii
x
2
i
et
i,j]
(x) = q
ij
x
i
x
j
si i ,= j.
66 2 Champ de Gibbs-Markov sur rseau
On obtient facilement les lois conditionnelles L
A
(X
A
[x
A
) en explicitant lner-
gie conditionnelle U
A
([x
A
) sur A. X est un champ (-markovien si, pour tout
i ,= j : q
ij
,= 0 i, j) est une arte du graphe (.
Potentiel invariant par translation
Si S = Z
d
et = E
Z
d
, la i-translation
i
sur est dnie par :
(
i
(x))
j
= x
i+j
, j Z
d
.
Soit V une partie nie de Z
d
,
V
: E
V
R une application mesurable et
borne. La spcication invariante par translation associe
V
est
(x
[x
) = Z
V
(x
)
1
exp
iZ
d
:i+V ],=
V
(
i
(x)),
o =
V +i
, i Z
d
, avec
V +i
(x) =
V
(
i
(x)), est le potentiel invariant
par translation dnissant .
Soient V
k
, k = 1, . . . , p, k parties nies non-vides de Z
d
,
k
: E
V
k
R, p
potentiels connus mesurables et borns et =
t
(
1
,
2
, . . . ,
p
) un paramtre
de R
p
. La spcication associe aux (
k
) et invariante par translation est la
famille exponentielle de paramtre dnergie,
U
(x) =
p
k=1
i:i+V
k
],=
k
(
i
(x)). (2.7)
Par exemple, le modle dIsing invariant par translation sur Z
d
et aux 2d-
ppv est associ aux d + 1 potentiels,
0
(x) = x
0
(V
0
= 0),
k
(x) = x
0
x
e
k
(V
k
= 0, e
k
), o e
k
est le k-ime vecteur unitaire de la base canonique de
R
d
, k = 1, . . . , d. Le paramtre de cette reprsentation est identiable. Le
sous-modle isotropique a pour potentiels
0
et
d
k=1
k
.
Modle hirarchique sur un espace produit E = R
p
Limagerie en tldtection ore un exemple o un tel espace produit est utile :
Y = (X, Z) o X
i
est un label de texture en i (fort, terrain cultiv,
friches, eau, etc...) et Z
i
R
p
une mesure multispectrale quantitative. Un
modle hirarchique sobtient par exemple en modlisant X par un modle
de Potts, puis, conditionnellement X, Z par une texture de niveau de gris
gaussienne multispectrale (cf. Ex. 2.6).
2.3 Champ de Markov et champ de Gibbs
Lintrt des champs de Gibbs rside dans leur capacit dnir simplement
des spcications conditionnelles cohrentes mais aussi dans leur proprit de
champ de Markov. Dnissons cette notion.
2.3 Champ de Markov et champ de Gibbs 67
2.3.1 Dnitions : cliques, champ de Markov
On suppose que S = 1, 2, . . . , n est muni dun graphe de voisinage ( sym-
trique et sans boucle. Deux sites i ,= j sont voisins si (i, j) est une arte de (,
ce quon note i, j) ; la frontire de voisinage de A est
A = i S, i / A : j A t.q. i, j).
On note i = i.
Dnition 2.2. Champ de Markov et cliques dun graphe
1. X est un champ de Markov sur S pour le graphe ( si, pour tout A S
et x
A
A
, la loi de X sur A conditionnelle x
A
ne dpend que de x
A
,
la conguration de x sur la frontire de voisinage de A :
A
(x
A
[x
A
) =
A
(x
A
[x
A
).
2. Une partie C non-vide de S est une clique du graphe ( si C est un singleton
ou si les lments de C sont deux deux voisins pour (. Lensemble des
cliques de ( est not ((().
Par exemple, pour le graphe de voisinage aux 4-ppv sur Z
2
, les cliques sont
constitues des singletons i et des sous-ensembles i, j avec |i j|
1
= 1.
Pour la relation aux 8-ppv, il faudra ajouter tous les triplets i, j, k et les
quadruplets i, j, k, l de sites u, v distance |u v|
1 (cf. Fig. 2.5).
2.3.2 Le thorme de Hammersley-Cliord
A une famille ( de parties de S contenant tous les singletons, on associe le
graphe de voisinage ((() ainsi dni : deux sites i ,= j sont voisins de ((()
sil existe C ( t.q. i, j C. La proprit suivante identie un champ de
Markov un champ de Gibbs.
Thorme 2.1. Thorme de Hammersley-Cliord (Besag [25])
1. Soit un (-champ de Markov sur E, vriant :
A
(x
A
[x
A
) > 0, A S et x E
S
. (2.8)
Fig. 2.5. Les 10 types de cliques pour le graphe de voisinage aux 8-ppv sur Z
2
.
68 2 Champ de Gibbs-Markov sur rseau
Alors il existe un potentiel =
A
, A ( dni sur (, lensemble des
cliques du graphe (, tel que est un champ de Gibbs de potentiel .
2. Rciproquement, soit ( une famille de parties de S contenant tous les
singletons. Alors, un champ de Gibbs de potentiels =
A
, A ( est
un champ de Markov pour le graphe de voisinage ((().
Dmonstration :
1. Notons 0 ltat de rfrence de E retenu. On va identier les potentiels
(
A
) partir de la fonctionnelle U(x) = log(x)/(0) puis vrier que
A
0 si A / (. La formule de Mobius (2.4) dit que lnergie U(x) vaut :
U(x) =
AS
A
(x) o
A
(x) =
BA
(1)
(A\B)
U(x
A
, 0).
Montrons que
A
= 0 si A i, j et si i ,= j sont deux sites non
voisins. Pour xer les ides, choisissons i, j = 1, 2, A = 1, 2 C
avec C 1, 2 = :
A
scrit encore,
A
(x) =
BC
(1)
(C\B)
U(x
1
, x
2
, x
C
, 0) U(x
1
, 0, x
C
, 0)
U(0, x
2
, x
C
, 0) +U(0, 0, x
C
, 0)
Les sites 1 et 2 ntant pas voisins,
U(x
1
, x
2
, x
C
, 0)U(x
1
, 0, x
C
, 0)=log
(x
1
, x
2
, x
C
, 0)
(x
1
, 0, x
C
, 0)
= log
(x
2
[x
1
, x
C
, 0)
(0[x
1
, x
C
, 0)
=log
(x
2
[x
C
, 0)
(0[x
C
, 0)
.
Cette dernire quantit ne dpendant pas de x
1
, on obtient bien
A
0 :
A
0 si A nest pas une clique de (.
2. La loi conditionnelle x
A
vaut :
A
(x
A
[x
A
) = Z
1
A
(x
A
) exp U
A
(x)
o
U
A
(x) =
c: cA,=
C
(x),
U
A
(x) ne dpendant que de x
i
: i AA, tant un ((()-champ de
Markov. .
Notant
i]
() la loi marginale de en i, la condition (2.8) du thorme peut
tre aaiblie en la condition dite de positivit de :
si pour x = (x
i
, i S), on a, i S :
i]
(x
i
) > 0, alors (x) > 0. (2.9)
Lexercice (2.8) donne un exemple de loi ne vriant pas la condition de
positivit.
2.4 Les auto-modles markoviens de Besag (AMM) 69
2.4 Les auto-modles markoviens de Besag (AMM)
Ces modles de Markov sont caractriss par des densits conditionnelles ap-
partenant une famille exponentielle [25]. Enonons le rsultat qui est la
base de leur dnition.
2.4.1 Recollement de lois conditionnelles et auto-modle
Soit un champ de Markov sur S = 1, 2, . . . , n avec des potentiels au plus
de paires de points,
(x) = C exp
iS
i
(x
i
) +
i,j]
ij
(x
i
, x
j
). (2.10)
Pour tout x E
n
, (x) > 0. On suppose dautre part vries les contraintes
didenabilit (2.3) en notant 0 ltat de rfrence de E. La proprit suivante
permet didentier les potentiels de X partir des lois conditionnelles de X.
Thorme 2.2. (Besag [25]) Supposons que chaque loi conditionnelle
i
([x
i
)
de appartienne la famille exponentielle :
log
i
(x
i
[x
i
) = A
i
(x
i
)B
i
(x
i
) +C
i
(x
i
) +D
i
(x
i
), (2.11)
o B
i
(0) = C
i
(0) = 0. Alors :
1. Pour tout i, j S, i ,= j, il existe
i
et
ij
=
ji
tels que :
A
i
(x
i
) =
i
+
j,=i
ij
B
j
(x
j
) (2.12)
i
(x
i
) =
i
B
i
(x
i
) +C
i
(x
i
),
ij
(x
i
, x
j
) =
ij
B
i
(x
i
)B
j
(x
j
) (2.13)
2. Rciproquement, des lois conditionnelles vriant (2.11) et (2.12) se re-
collent en une loi jointe qui est un champ de Markov de potentiels (2.13).
Dmonstration :
1. Notant 0
i
la modalit 0 en i, on a, pour le champ (2.10) :
U(x) U(0
i
, x
i
) =
i
(x
i
) +
j,=i
ij
(x
i
, x
j
) = log
i
(x
i
[x
i
)
i
(0
i
[x
i
)
.
Fixant x
i
= 0, la conguration 0 partout sur Si, cette identit donne
i
(x
i
) = A
i
(0)B
i
(x
i
)+C
i
(x
i
). Choisissons x tel que x
i,j]
= 0 pour i = 1,
j = 2. Lexamen de U(x) U(0
1
, x
1
) et de U(x) U(0
2
, x
2
) donne :
1
(x
1
) +
12
(x
1
, x
2
) = A
1
(0, x
2
, 0, . . . , 0)B
1
(x
1
),
2
(x
2
) +
12
(x
1
, x
2
) = A
2
(x
1
, 0, . . . ; 0)B
2
(x
2
),
70 2 Champ de Gibbs-Markov sur rseau
12
(x
1
, x
2
) = [A
1
(0, x
2
, 0) A
1
(0)]B
1
(x
1
) = [A
2
(x
1
, 0) A
2
(0)]B
2
(x
2
),
et
A
2
(x
1
, 0) A
2
(0) =
A
1
(0, x
2
, 0) A
1
(0)
B
2
(x
2
)
B
1
(x
1
), si B
2
(x
2
) ,= 0.
On en dduit que B
2
(x
2
)
1
[A
1
(0, x
2
, 0) A
1
(0)] est constante en x
2
,
gale
21
. En permutant les indices 1 et 2, on dnit de faon ana-
logue
12
et on vrie que dune part,
12
=
21
, et dautre part,
12
(x
1
, x
2
) =
12
B
1
(x
1
)B
2
(x
2
). Identiant alors les lois conditionnelles,
on obtient (2.12) avec
i
= A
i
(0).
2. Il sut de vrier que le champ de potentiels (2.13) a pour lois condition-
nelles celles associes (2.11) et (2.12) : en eet
U(x
i
, x
i
) U(0
i
, x
i
) =
i
(x
i
) +
ij
(x
i
, x
j
)
=
i
B
i
(x
i
) +C
i
(x
i
) +
ij
B
i
(x
i
)B
j
(x
j
)
= A
i
(x
i
)B
i
(x
i
) +C
i
(x
i
)) = log
i
(x
i
[x
i
)
i
(0
i
[x
i
)
.
.
Une classe importante de champ de Markov est celle des champs de Gibbs
valeurs dans E R avec des potentiels au plus de paires de points, les
potentiels de paires tant quadratiques.
Dnition 2.3. Auto-modle markovien (AMM) de Besag
X est un auto-modle markovien si X est valeurs dans R et si sa loi
scrit :
(x) = Z
1
exp
iS
i
(x
i
) +
i;j)
ij
x
i
x
j
(2.14)
avec
ij
=
ji
, i, j.
Un corollaire important du thorme prcdent permet de dnir un mo-
dle joint partir de lois conditionnelles dont le recollement est automatique.
Corollaire 2.3 Soit =
i
([x
i
), i S une famille de lois conditionnelles
relles vriant (2.11) et telle que, pour tout i S, B
i
(x
i
) = x
i
. Alors, ces
lois se recollent en un auto-modle de Markov dont la loi est donne par
(2.14) ds que, pour tout i ,= j,
ij
=
ji
.
2.4.2 Exemples dauto-modles markoviens
Auto-modle logistique : E = 0, 1
Pour chaque i, la loi conditionnelle
i
([x
i
) est un modle Logit de paramtre
i
(x
i
) :
2.4 Les auto-modles markoviens de Besag (AMM) 71
i
(x
i
) =
i
+
j:i,j)
ij
x
j
,
i
(x
i
[x
i
) =
exp x
i
i
+
j:i,j)
ij
x
j
1 + exp
i
+
j:i,j)
ij
x
j
.
Si, pour tout i ,= j,
ij
=
ij
, ces lois conditionnelles se recollent en la loi
jointe dnergie U,
U(x) =
i
x
i
+
i,j)
ij
x
i
x
j
.
Auto-modle binomial : E = 0, 1, 2, . . . , N
Considrons une famille de lois conditionnelles binomiales
i
([x
i
)
Bin(N,
i
(x
i
)) telles que
i
(x
i
) vrie :
A
i
(x
i
) = log
i
(x
i
)/(1
i
(x
i
)) =
i
+
j:i,j)
ij
x
j
.
Alors, si pour tout i ,= j,
ij
=
ji
, ces lois se recollent en une loi jointe
dnergie U,
U(x) =
i
(
i
x
i
+ log
_
N
xi
_
) +
i,j)
ij
x
i
x
j
.
Le paramtre binomial conditionnel vaut
i
(x
i
) = [1 + exp
i
+
jS:i,j)
ij
x
j
]
1
.
Dans ces deux premiers exemples, E tant ni, U est toujours admissible.
Ce nest plus le cas dans les deux exemples suivants.
Auto-modle poissonnien : E = N
Supposons que les lois conditionnelles
i
([x
i
) soient des lois de Poisson
T(
i
(x
i
)), i S dont les paramtres satisfont aux modles log-linaires :
log
i
(x
i
) = A
i
(x
i
) =
i
+
j:i,j)
ij
x
j
.
Si
ij
=
ji
0 pour i ,= j, dnissons lnergie jointe associe par
U(x) =
i
(
i
x
i
+ log(x
i
!)) +
j:i,j)
ij
x
i
x
j
.
U nest admissible que si
ij
0 pour i ,= j. En eet, si cest le cas,
72 2 Champ de Gibbs-Markov sur rseau
exp U(x)
iS
exp(
i
x
i
)
x
i
!
,
et
N
S exp U(x) converge ; sinon, si par exemple
1,2
> 0, on a, pour x
1
et
x
2
assez grands,
exp U(x
1
, x
2
, 0, . . . , 0) =
exp
1
x
1
+
2
x
2
+
1,2
x
1
x
2
x
1
!x
2
!
exp
1,2
x
1
x
2
/2
x
1
!x
2
!
.
Le terme minorant tant celui dune srie divergente, U nest pas admissible.
Cette condition dadmissibilit
ij
0 traduit une comptition entre sites
voisins. Si on veut autoriser la coopration entre sites, on peut :
1. Soit borner lespace dtat E une valeur K < , E = 0, 1, , . . . , K, par
exemple en considrant les variables Z
i
= infX
i
, K censures droite.
2. Soit retenir les lois de Poisson conditionnelles X K.
Le nouvel espace dtat tant ni, ces modles seront toujours admissibles
et permettront de recouvrir autant des situations de comptition que des
situations de coopration [127; 9].
Auto-modle exponentiel : E =]0, +[
Ce sont des modles lois conditionnelles exponentielles :
i
(x
i
[x
i
) cxp(
i
(x
i
)),
i
(x
i
) =
i
+
j:i,j)
ij
x
j
.
Si, pour tout i ,= j,
i
> 0 et
ij
=
ji
0, ces lois se recollent en une loi
jointe dnergie U admissible,
U(x) =
i
x
i
i,j)
ij
x
i
x
j
,
la positivit
ij
0 traduit une comptition entre les sites i et j. On pourra
autoriser la coopration entre sites voisins (
ij
< 0) soit en tronquant E
[0, K], soit en retenant des lois exponentielles conditionnelles X K.
Arnold et al. [8] gnralisent ces modles aux cliques de plus de 2 points :
la loi jointe
(x) = Z
1
exp
Ac
lA
x
l
est admissible si, pour tout i S,
i]
> 0 et si
A
0 ds que A 2. On v-
rie facilement que les lois conditionnelles de en un site sont exponentielles.
Arnold et al. [8] prsentent galement ces gnralisations des potentiels au
del des paires pour des conditionnelles normales, Gamma ou Poisson.
2.4 Les auto-modles markoviens de Besag (AMM) 73
Auto-modle gaussien : E = R
Une loi gaussienne X ^
n
(, ) sur S = 1, 2, . . . n dont la covariance
est inversible, de matrice de prcision
1
= Q, est un modle de Gibbs
dnergie et de potentiels de singletons et de paires donns par :
U(x) = (1/2)
t
(x )Q(x ),
i
(x
i
) =
1
2
q
ii
x
2
i
+
i
x
i
,
o
i
=
j
q
ij
j
et
ij
(x
i
, x
j
) = q
ij
x
i
x
j
. Cette spcication est admis-
sible ssi Q est d.p.. Ayant pour nergie conditionnelle U
i
(x
i
[x
i
) =
i
(x
i
) +
j,=i
ij
(x
i
, x
j
), la loi conditionnelle L
i
(X
i
[x
i
) est normale de variance q
1
ii
et de moyenne,
i
(x
i
) = q
1
ii
j,=i
q
ij
(x
j
j
).
Un tel modle est aussi un CAR gaussien.
Auto-modle markovien avec covariables (AMMX)
Sans contraintes, un modle non-stationnaire est de trop grande dimension
paramtrique pour tre utile dans la pratique. Dans chacun des auto-modles
prcdents, on peut rduire cette dimension en modlisant le paramtre =
(
i
,
ij
), i ,= j, i, j S partir de covariables observables x = (x
i
, i S)
et/ou des poids (a
i
), (w
ij
) connus, w tant une matrice symtrique : par
exemple, le choix
ij
= w
ij
et
i
=
p
j=1
j
a
i
x
ij
o x
i
=
T
(x
i1
, . . . , x
ip
)
R
p
est une covariable observable, conduit un modle p + 1 paramtres.
Auto-modles tats mixtes
Le rsultat du thorme (2.2) a t gnralis par Handouin et Yao [109] au cas
de familles exponentielles (2.11) dont le paramtre A
i
est multidimensionnel,
A
i
() R
p
. Dans ce cas, le produit A
i
()B
i
(x
i
) est remplac par le produit sca-
laire A
i
(), B
i
(x
i
)). Cette gnralisation permet de dnir des auto-modles
tats mixtes de la faon suivante.
Considrons que X est une v.a. valeurs dans lespace dtat mixte E =
0]0, [ avec une masse p en 0 et une densit g
sur ]0, [ si X > 0.
Par exemple, X est le module de la vitesse dun objet, gale 0 si lobjet
est immobile et > 0 sinon ; ou encore, X est la hauteur de pluie tombe
un jour donn dans une station, gale 0 sil na pas plu et > 0 sinon.
Le paramtr (p, ) R
1+k
est multidimensionnel ds que R
k
, k 1.
Notons
0
la fonction de Dirac en 0 et supposons que g
appartienne la
famille exponentielle,
g
(x) = g
(0) exp
t
t(x).
74 2 Champ de Gibbs-Markov sur rseau
Quelques manipulations simples montrent que, relativement la mesure de
rfrence (dx) =
0
(dx)+(dx) sur lespace dtat mixte, X admet la densit
de probabilit,
f
(x) = (1 p)g
(0) exp
t
B(x),
o B(x) = (
t
0
(x), t(x)) et = log
(1 p)g
(0)
p
.
La construction dun auto-modle tats mixtes consistera alors consi-
drer des lois conditionnelles
i
(x
i
[x
i
) de densit f
([x
i
), le recollement de
ces lois tant assur par la gnralisation du thorme (2.2) au cas dun pa-
ramtre multidimensionnel. Ces modles sont utiliss dans [31] en analyse du
mouvement, le champ des vitesses conditionnelles retenu tant un auto-modle
gaussien mixte positif, c--d le champ conditionnel de module de gaussiennes
centres autorisant des masses > 0 pour les vitesses nulles.
Exemple 2.2. Mortalit par cancer dans la rgion de Valence (Espagne)
Suivant Ferrandiz et al. [78], nous prsentons une modlisation permet-
tant lanalyse de donnes pidmiologiques de cancers (vessie, colon, prostate
et estomac) dans la rgion de Valence (Espagne). Lobjectif est de voir si
la concentration en nitrate dans leau potable a un eet ou non sur ces can-
cers, cette rgion dintense activit agricole concentrant en eet dimportantes
quantits de fertilisants. La rgion de Valence est compose de 263 cantons,
i tant le chef-lieu de canton et X
i
agrgeant sur la priode 19751980 le
nombre de dcs dans le canton, pour un type de cancer. Deux covariables
sont retenues : z
1
, le pourcentage de la population de plus de 40 ans, et z
2
, la
concentration en nitrate dans leau potable distribue.
Classiquement, lanalyse statistique des X = X
i
, i S utilise un modle
log-linaire de rgression poissonnienne incorporant les variables explicatives
appropries z
i
=
T
(z
i1
, . . . , z
ip
) (ici p = 2),
(X
i
[x
i
, z
i
) T(
i
),
o log(
i
) =
i
+
p
k=1
k
z
ik
. Ce modle postule lindpendance des comp-
tages, ce qui est mis en doute.
Un auto-modle de Poisson permet de lever cette hypothse : il prserve
lexplication de X
i
partir des covariables z mais autorise la dpendance de
X
i
, des variables x
i
voisines tant des auto-covariables inuenant X
i
. Ces
modles permettront de dtecter sil y a ou non dpendance spatiale entre
les X
i
et/ou si dautres covariables, facteurs de risque, prsentant une d-
pendance spatiale ont t oublies dans le modle. Lauto-modle poissonnien
retenu est le suivant :
(X
i
[x
i
, z
i
) T(
i
), log(
i
) =
i
+
p
k=1
k
z
ik
+
j : i,j)
i,j
x
j
. (2.15)
2.4 Les auto-modles markoviens de Besag (AMM) 75
Les paramtres (
i
) captent les propensions la maladie propres chaque
site i S, les paramtres (
k
) linuence des covariables (z
k
) alors que les
(
i,j
, j i, i S) mesurent linuence des x
i
aux sites voisins sur X
i
.
Il y a deux interprtations concernant les paramtres :
1. Ils peuvent mesurer une inuence relle directe entre variables X
j
voi-
sines, comme cest naturel pour un phnomne de contagion (ce nest pas
le cas ici).
2. Ils peuvent capter et rsumer dautres facteurs de risque non-prsents dans
le modle et prsentant une structure spatiale : au site i, ces eets cachs
sont alors pris en charge par les (auto)covariables observables x
i
. Tester
que ,= 0 signie que ces facteurs sont signicatifs. En gnral, il y a
confusion entre ces deux origines.
Pour que le modle soit admissible, les paramtres du modle doivent
tre 0, des valeurs positives pouvant tre acceptes condition de tronquer
les variables de rponse x
i
, ce qui est raisonnable car x
i
ne peut dpasser la
population du canton i.
Sous sa forme (2.15), le modle est inutilisable car il y a plus de paramtres
que dobservations. Dautre part, il faut identier la relation de voisinage
spatial entre cantons.
Concernant et la relation de voisinage, Ferrandiz et al. [78] proposent
la modlisation suivante : si u
i
est la population du canton i, si d
ij
est la
distance entre les chefs-lieux de cantons i et j, la relation de voisinage i, j)
et les paramtres
ij
vont se dduire des indices de proximit (a
ij
) suivants :
i, j) si a
ij
=
u
i
u
j
d
ij
> a et
ij
= a
ij
.
a > 0 est soit une valeur pralablement xe ou encore a est considr comme
un paramtre du modle.
Quant aux
i
, ils sont modliss sur la base dun seul paramtre :
i
= + log(u
i
).
Linterprtation du coecient 1 devant log(u
i
) est que lon suppose que le
nombre moyen
i
de dcs est proportionnel leectif u
i
de la population du
canton i. On obtient ainsi un modle p + 2 paramtres (ici 4 paramtres),
= (, (
k
), ) :
(X
i
[x
i
, z
i
) T(
i
), log(
i
) = + log(u
i
) +
p
k=1
k
x
ik
+
j:i,j)
a
i,j
x
j
.
(2.16)
Si = 0, on retrouve la rgression poissonnienne log-linaire dintercept , de
covariables x et de compensateur log(u).
76 2 Champ de Gibbs-Markov sur rseau
2.5 Dynamique dun champ de Markov
Ce paragraphe est une illustration de lutilisation des champs de Gibbs en mo-
dlisation de dynamiques spatiales. Les modles proposs sont semi-causaux
et se prtent bien la simulation et lestimation, chanes de Markov tem-
porelles (homognes ou non) de champs de Markov (conditionnels) spatiaux
[98]. Une autre famille est celle des modles linaires STARMA (pour Spatio-
temporal ARMA) de Pfeifer et Deutsch [76; 174], faciles manipuler et trs
utiliss en conomtrie spatiale (cf. galement Cressie [48, 6.8]).
2.5.1 Chane de Markov de champ de Markov (CMCM)
Soit X = X(t), t = 1, 2, . . ., o X(t) = (X
i
(t), i S) et S = 1, 2, . . . , n,
une chane de Markov homogne sur = E
S
. Notant y = x(t 1) et x = x(t)
deux tats successifs de la chane, la transition y x peut scrire :
P(y, x) = Z
1
(y) exp U(x[y),
o Z(y) =
_
exp U(z[y)dz < si lnergie conditionnelle U([y) est presque
srement admissible en y. Si de plus, conditionnellement y, X(t) est un
champ de Markov sur S, on peut modliser U([y) partir de potentiels
A
et
BA
:
U(x[y) =
Ac
A
(x) +
Bc
,Ac
B,A
(y, x), (2.17)
o ( et (
sont deux familles de parties de S dcrivant deux types dinterac-
tions associes deux graphes ( et (
:
1. Les potentiels dinteraction instantane
A
, A ( : ( dnit le graphe
non-orient des voisins instantans ((().
2. Les potentiels dinteraction temporelle
B,A
(y, x), B (
, A (. (
dnit un graphe orient (
: j, i)
pour j B et i A traduit que le
site j au temps (t 1) a une inuence sur le site i au temps t. En gnral,
j, i)
nimplique pas i, j)
.
Un site i S a donc des voisins instantans i = j S : i, j) et des
voisins du pass i
= j S : j, i)
. Les ches de dpendance sont :
(j, t) (i, t) si i, j) et (j, t 1) (i, t) si j, i)
. Le modle (2.17) est
semi-causal, chane de Markov dans le temps et champ de Markov conditionnel
dans lespace. La loi conditionnelle de X
(t), S, conditionnelle (y =
x(t 1), x
= x
(t)), a pour nergie :
U
(x
[y, x
) =
Ac:A,=
A
(x) +
Bc
B,A
(y, x).
Lextension de ces modles un contexte temporel non-homogne et/ou avec
une mmoire plus grande ne prsente pas de dicults.
2.5 Dynamique dun champ de Markov 77
2.5.2 Exemples de dynamiques
Dynamique auto-exponentielle
Lnergie conditionnelle :
U(x[y) =
iS
(
i
+
i
(y))x
i
i,j]c
ij
(y)x
i
x
j
dnit une dynamique auto-exponentielle admissible si, pour tout i, j S,
i
> 0,
i
() 0 et
ij
() =
ji
() 0. On peut spcier les fonctions
i
() et
ij
(), par exemple partir dune covariable exogne x :
i
(y) =
ji
ji
y
j
et
ij
(y) =
ij
.
Dynamique auto-logistique
Cette dynamique, schmatise par la Fig. 2.6-a, admet pour transition condi-
tionnelle :
P(y, x) = Z
1
(y) exp
iS
( +
jS:j,i)
y
j
)x
i
+
i,jS:i,j)
x
i
x
j
. (2.18)
Exemple 2.3. Dynamique de contamination racinaire de lhva
Une forme simplie dun modle propos par Chadoeuf et al. [41] pour
tudier le processus de contamination racinaire de lhva est la suivante :
on suppose que la localisation spatiale est unidimensionnelle, i S =
1, 2, . . . , n Z et que le processus dtat binaire Z
i
(t), i S et t =
0, 1, 2, . . . vrie :
t1 t
i
t
t+1
i
t1
(a) (b)
Fig. 2.6. (a) Graphes de la dynamique auto-logistique : , voisins de (i, t) du pass ;
, voisins de (i, t) instantans. (b) Graphe du modle de contamination racinaire de
lhva : , voisins de ltat = (i, t + 1) sachant que ltat = (i, t) est sain.
78 2 Champ de Gibbs-Markov sur rseau
1. Z
i
(t) = 0 si ltat racinaire de lhva en (i, t) est sain, Z
i
(t) = 1 sinon.
2. La contamination est sans gurison : si Z
i
(t) = 0, alors Z
i
(t
t
) = 0 pour
t
t
< t et si Z
i
(t) = 1, alors Z
i
(t
t
) = 1 pour t
t
> t.
3. La contamination est markovienne aux ppv, de mmoire temporelle 2. La
Fig. 2.6-b reprsente lensemble des sites (j, t
t
) voisins du site (i, t + 1).
Considrons le vecteur
X
i
(t) = (Z
i
(t 2), Z
i
(t 1), Z
i
(t)). On peut identier
X
i
(t) avec X
i
(t), une chane de Markov 4 tats 0, 1, 2, 3 ainsi dnie :
(i) X
i
(t) = 0 si Z
i
(t) = 0 ; (ii) X
i
(t) = 1 si Z
i
(t) = 1 et Z
i
(t 1) = 0 ; (iii)
X
i
(t) = 2 si Z
i
(t1) = 1 et Z
i
(t2) = 0 ; (iv) enn, X
i
(t) = 3 si Z
i
(t2) = 1.
Reste modliser la transition P(y, x) de y = x(t) vers x = x(t + 1) ; un
exemple de choix dnergie est :
U(y, x) =
i : yi=0
(x
i
) +
i,j) : yiyj=0
(x
i
, x
j
)
en imposant les contraintes didentiabilit, (0) = 0 et, pour tout a, b,
(a, 0) = (0, b) = 0.
Dans la dnition de U, il sut de limiter la sommation aux potentiels
de singletons (y
i
, x
i
) aux seuls sites i pour lesquels y
i
(t) = y
i
= 0 (on note
alors (x
i
) = (0, x
i
)) : en eet, si y
i
(t) 1, larbre en i est malade et le
restera. De mme, la sommation sur les potentiels de paires est limite aux
sites voisins i, j) tels que y
i
(t) y
j
(t) = 0 : en eet, dans le cas contraire,
les arbres en i et j sont malades linstant t et le resteront. La dimension
paramtrique de ce modle est 12.
Exercices
2.1. Contraintes de recollement de lois conditionnelles.
S = 1, 2, . . . , n, E = 0, 1, 2, . . . , K 1 et T =
i
(x
i
[x
i
), i S est une
famille non-contrainte de lois conditionnelles tats dans E.
1. Quelle est la dimension paramtrique de T ? Quel est le nombre de
contraintes que lon doit imposer T si on veut que T sidentie aux
lois conditionnelles dune loi jointe dnie sur E
S
?
2. On considre le noyau aux 2-ppv sur Z pour un processus tats dans
E = 0, 1, . . . , K 1 :
Q(y[x, z) = P(X
0
= y[X
1
= x, X
+1
= z).
Quelle est la dimension paramtrique de Q? A quelles conditions ces lois
conditionnelles sont-elles celles dun champ de Markov aux 2-ppv ?
2.2. Recollement de lois bivaries [8].
1. Utilisant la caractrisation (2.1), vrier que les deux familles de densits
conditionnelles,
2.5 Dynamique dun champ de Markov 79
f
X]Y
(x[y) = (y + 2)e
(y+2)x
1(x > 0),
f
Y ]X
(y[x) = (x + 3)e
(x+3)y
1(y > 0),
se recollent en une loi jointe (X, Y ). Identier les densits marginales et
jointes.
2. Les deux densits ci-dessous se recollent-elles en une loi jointe ?
f
X]Y
(x[y) = y 1(0 < x < y
1
)1(y > 0),
f
Y ]X
(y[x) = x1(0 < y < x
1
)1(x > 0).
2.3. Dimension paramtrique dun modle complet.
Soit f : E
S
R une fonction relle dnie sur E = 0, 1, . . . , K 1, o S =
1, 2, . . . , n, et telle que f(0) = 0. f est alors associe des potentiels =
A
, A S et A ,= par la formule dinversion de Mobius. Ces potentiels
sont identiables et vrient (2.3). Vrier que les K
n
1 paramtres de f se
retrouvent dans ceux de .
2.4. Recollement de lois conditionnelles gaussiennes.
On considre lnergie U sur R
2
dnie par :
U(x, y) = a
1
x +a
2
y +b
1
x
2
+b
2
y
2
+cxy +d
1
xy
2
+d
2
x
2
y +ex
2
y
2
.
1. Vrier que si e > 0, b
1
> 0 et si d
2
< 4eb
1
, alors lnergie condition-
nelle U(x[y) est admissible et que cest celle dune loi gaussienne dont on
identiera les paramtres. Mme question pour U(y[x).
2. On note
1
= inf
x
b
2
+d
1
x + (e/2)x
2
,
2
= inf
y
b
1
+ d
2
y + (e/2)y
2
et
= inf
1
,
2
. Montrer que U(x, y) est admissible sous la condition :
b
1
, b
2
, e > 0, d
1
< 2b
2
e, d
2
< 2b
1
e, [c[ < .
En dduire un exemple de loi sur R
2
qui est non gaussienne mais dont les
lois conditionnelles sont gaussiennes.
2.5. Modle de Gibbs sur le rseau triangulaire plan.
1. Identier le modle stationnaire aux 6 plus proches voisins sur le rseau
triangulaire plan et 3 tats E = a, b, c : cliques, potentiels, dimen-
sion paramtrique, loi conditionnelle en un site, loi conditionnelle sur une
partie. Expliciter le modle si E R.
2. Mme question mais : (i) le modle est isotropique ; (ii) le modle a au
plus des potentiels de paires ; (iii) les potentiels
A
sont invariants par
permutation sur A.
3. Mmes questions pour un modle deux tats.
2.6. Champ de Markov pour la segmentation de texture.
On modlise un champ (X, ) sur S = 1, 2, . . . , n
2
et valeurs dans E =
R 1, 2, . . . , K de la faon hirarchique suivante :
80 2 Champ de Gibbs-Markov sur rseau
la texture suit le modle de Potts (2.6) aux 8-ppv ;
conditionnellement , on adopte lun des modles (X[) :
1. (X
i
[
i
= k) ^(0,
2
k
) est une texture gaussiene de rugosit.
2. (X
i
[
i
= k) ^(
k
,
2
) est une texture de niveau de gris.
3. Sur une plage de label constant k, X est une texture de covariation
modlise par un CAR gaussien isotropique aux 4-ppv de paramtre
(
k
,
2
e
), 0
k
< 1/4.
1. Expliciter les dirents modles (cliques, potentiels).
2. On observe X : dterminer les lois ([X), (
i
[
i
, X). Utilisant lchan-
tillonneur de Gibbs (cf. 4.2), simuler ([X).
2.7. Restauration dun signal gaussien.
1. Y = hX+ est lobservation rsultant de la h-convolution du signal gaus-
sien X = X
i
, i S bruite additivement par , un BBG ^(0,
2
)
indpendant de X. Expliciter les modles : (X, Y ), (X[y) et (X
i
[x
i
, y),
i S, dans les deux situations suivantes :
(a) S = 1, 2, . . . , n, X est le CAR stationnaire aux 2-ppv et (h x)
i
=
a(X
i1
+X
i+1
) +bX
i
;
(b) S = 1, 2, . . . , n
2
, X est le CAR stationnaire aux 4-ppv et hX = X.
2. On observe Y = y : simuler (X[y) par chantillonnage de Gibbs (cf. 4.2).
2.8. Une loi ne vriant pas la condition de positivit (2.9).
On considre un processus X(t), t 0 voluant dans le temps sur S =
1, 2, 3 et valeurs 0, 1
3
. X
i
(t) repre ltat du site i S au temps t 0
avec : X
i
(t) = 0 si ltat est sain, X
i
(t) = 1 sinon. On suppose quun tat
infect ne peut gurir. Si x(0) = (1, 0, 0) et si la contamination de t (t + 1)
se fait aux ppv de faon i.i.d. avec une probabilit , dterminer la loi (2) de
X(2). Vrier que (2) ne satisfait pas la condition de positivit, c--d quil
existe x = (x
1
, x
2
, x
3
) telle que
i
(2)(x
i
) > 0 pour i = 1, 2, 3 mais (2)(x) = 0.
2.9. Modle causal et criture bilatrale associe.
1. Soit Y une chane de Markov sur E = 1, +1 de transitions p = P(Y
i
=
1[Y
i1
= 1) et q = P(Y
i
= 1[Y
i1
= 1).
(a) Dmontrer que Y est un champ de Markov bilatral aux 2-ppv.
(b) En dduire que le noyau conditionnel bilatral scrit
Q(y[x, z) = Z
1
(x, z) expx( +(y +z),
o = (1/2) log(p/q) et = (1/4) logpq/[(1 p)(1 q)].
(c) Interprter les situations : = 0 ; = 0.
2.5 Dynamique dun champ de Markov 81
2. Sur Z et pour E = 0, 1, donner la reprsentation bilatrale markovienne
du processus de Markov homogne de mmoire 2 et de transition
P(Y
i
= 1[Y
i2
= a, Y
i1
= b) = p(a, b).
Un champ de Markov aux 4-ppv sur Z est-il en gnral une chane de
Markov de mmoire 2 ?
3. On considre sur S = 1, 2, . . . , n le modle dnergie :
U(y) = a
n
i=1
y
i
+b
n1
i=1
y
i
y
i+1
+c
n2
i=1
y
i
y
i+2
.
On partitionne S en I P, o I est lensemble des indices impairs, P celui
des indices pairs. Vrier que (Y
I
/y
P
) est une chane de Markov.
4. On considre sur Z
2
un champ Y binaire causal pour lordre lexicogra-
phique, de loi conditionnelle en (i, j) dpendant des seuls sites (i 1, j)
et (i, j 1) du pass. Donner la modlisation bilatrale de Y .
2.10. Chane et champ de Markov chantillonns.
1. Une chane de Markov Y = (Y
1
, Y
2
, . . . , Y
n
) de loi initiale Y
1
et de
transitions q
i
, i = 1, . . . , n 1 a pour loi :
P
(y) = (y
1
)
n1
i=1
q
i
(y
i
, y
i+1
).
Montrer que Y observe un instant sur deux est encore une chane de Mar-
kov. Expliciter sa loi (transition, potentiels) si la transition est homogne
et pour un espace dtats E = 0, 1.
2. Un champ de Markov Y aux 4-ppv sur le tore S = 1, 2, . . . , n
2
est
observ sur S
+
= (i, j) S : i + j est paire. Montrer que Y
S
+ est un
champ de Markov de cliques maximales C
ij
= (i, j), (i +2, j), (i +1, j +
1), (i+1, j 1), (i, j) S. Dterminer la loi de Y
S
+ si Y est stationnaire
et E = 0, 1.
3. Montrer que la proprit de Markov du (b) se perd : (i) si Y est markovien
aux 8-ppv ; (ii) si on chantillonne Y sur S
2
= (i, j) S : i et j pairs.
2.11. Modle de champ de Markov bruit.
Soit Y un champ de Markov binaire aux 2-ppv sur S = 1, 2, . . . , n. On
suppose que Y
i
est transmis avec erreur, lobservation Z
i
tant caractrise
indpendamment site par site par la loi :
P(Y
i
= Z
i
) = 1 = 1 P(Y
i
,= Z
i
).
Ecrire la distribution jointe de (Y, Z). Le signal reu Z est-il un champ de
Markov ? Vrier que (Y [Z) est un champ de Markov conditionnel. Expliciter
ses distributions conditionnelles (Y
i
[Y
i
, Z).
82 2 Champ de Gibbs-Markov sur rseau
2.12. Reconstruction dun systme de plages colores.
Sur S = 1, 2, . . . , n
2
, on veut reconstruire une image x = x
i
, i S
quatre modalits x
i
E = a
1
, a
2
, a
3
, a
4
au vu dune observation y, la
dgradation de x au travers de canaux bruits se faisant de faon i.i.d. au
taux p < 1/4 :
P(Y
i
= X
i
) = 1 3p et P(Y
i
= a
k
[X
i
= a
l
) = p, i S, k ,= l.
1. Dmontrer que, pour n(y, x) =
iS
1(x
i
= y
i
) :
(y[x) = c(p) exp
_
n(y, x) log
1 3p
p
_
.
2. On retient pour loi a priori de x le modle de Potts (2.6) de paramtre
quatre modalits. Montrer que :
a) (x[y) = c(y, p) exp
_
n(x) +n(y, x) log
1 3p
p
_
;
b)
i
(x
i
[y, x
i
) = c
i
(y, p, x
i
) exp U(x
i
[y, x
i
) avec
U(x
i
[y, x
i
) =
jS : i,j)
1(x
i
= x
j
) + log
1 3p
p
1(y
i
= x
i
)
.
3. Reconstruction de x par la mthode du Marginal Posterior Mode (MPM
[150] ; cf. aussi [96; 224]). Cette reconstruction consiste retenir, en chaque
site i S, le mode marginal de (X
i
[y) :
x
i
= argmax
xiE
i
(x
i
[y).
La loi marginale
i
(x
i
[y) de la loi de Gibbs (X[y) tant analytiquement
incalculable, on valuera ce mode par mthode de Monte Carlo. Utilisant
lchantillonneur de Gibbs (cf. Ch. 4) pour la simulation de (X[y) partir
de ses lois conditionnelles
i
(x
i
[y, x
i
), crire lalgorithme de reconstruction
de x par MPM.
Application : pour un choix de S et de partition de S = A
1
A
2
A
3
A
4
dnissant x, oprer le bruitage de canal x y pour p = 1/5. Reconstruire
x
(y) par MPM pour dirents choix de paramtre de rgularisation .
3
Processus ponctuels spatiaux
Alors quaux Ch. 1 et 2 les sites de S R
d
o ont lieu les observations sont
xs sur un rseau prdtermin non alatoire, ici cest la rpartition spatiale
alatoire x = x
1
, x
2
, . . . de ces sites qui nous intresse. On dit que x est
la ralisation dun processus ponctuel (PP) X, le nouvel espace des tats
x sidentiant aux parties localement nies de S. Pour les PP marqus, une
observation de marque m
i
est en plus attache chaque site observ x
i
.
Les PP sont utiliss dans des disciplines varies (Diggle [62]), en colo-
gie et en foresterie (rpartition despces vgtales ; [154]), en pidmiologie
spatiale (positions ponctuelles de malades ; [141]), en sciences des matriaux
(modles de porosit ; [197]), en sismologie et gophysique (picentres et ven-
tuellement intensits de tremblements de terre), en astrophysique (positions
dtoiles dune nbuleuse ; [163]).
La Fig. 3.1 prsente trois exemples de ralisations de PP : (a) est une r-
partition au hasard de fourmilires dans une fort, aucune structure spatiale
ne semble apparatre ; la rpartition (b), plus rgulire, est celle des centres
de cellules dun tissu cellulaire, chaque centre prservant un espace propre
alentour ; enn pour (c), qui reprsente une rpartition de pins dans une fort
nlandaise, les points ont tendance sagrger autour de points parents.
La thorie probabiliste des processus ponctuels est technique et nous
ne laborderons pas ici dans toute sa gnralit. Notre objectif est de donner
une approche privilgiant la description des modles de PP les plus utiliss et
de leurs principales statistiques. Certaines notions telles la loi dun PP, la me-
sure de Palm dun PP, lintensit conditionnelle de Papanglou, la proprit de
Markov aux plus proches voisins, seront prsentes de faon heuristique mais
requirent des justications thoriques plus approfondies que lon pourra trou-
ver par exemple dans les livres de Daley et Veres-Jones [56], Stoyan et al. [204],
van Lieshout [217], Mller et Waagepetersen [160]. Notre prsentation sest
en partie inspire de larticle de synthse de Moller et Waagepetersen [161]
qui est un expos moderne, concit et non technique des principaux modles
de PP et de leur statistique.
84 3 Processus ponctuels spatiaux
0 200 400 600 800
0
1
0
0
2
0
0
3
0
0
4
0
0
5
0
0
6
0
0
x
y
0.2 0.4 0.6 0.8 1.0
0
.
0
0
.
2
0
.
4
0
.
6
0
.
8
x
y
(a) (b)
4 2 0 2 4
2
0
2
x
y
(c)
Fig. 3.1. Exemples de rpartition ponctuelle : (a) 97 fourmilires (donnes ants du
package spatstat) ; (b) 42 centres de cellules dune section histologique observe
au microscope (donnes cells de spatstat) ; (c) 126 pins dune fort nlandaise
(donnes finpines de spatstat).
3.1 Dnitions et notations
Soit S un ferm de R
d
, B (resp. B(S), B
b
(S)) lensemble des borliens de R
d
(resp. des borliens de S, des borliens borns de S), la mesure de Lebesgue
sur B
d
. La ralisation x dun processus ponctuel X sur S est la donne dune
collection localement nie de points de S,
x = x
1
, x
2
, . . ., x
i
S,
c--d une partie x S telle que xB est nie pour toute partie B borlienne
borne. Notons ^
S
lensemble des congurations localement nies, x, y . . .
des congurations sur S et x
i
, y
i
, , des points de ces congurations. Suivant
Daley et Vere-Jones [56] (cf. aussi [217]),
3.1 Dnitions et notations 85
Dnition 3.1. Un processus ponctuel sur S est une application X dun es-
pace de probabilit (, /, P) dans lensemble ^
S
des congurations localement
nies telle que pour tout borlien born A, le nombre de points N(A) = N
X
(A)
de points de X tombant dans A est une variable alatoire.
Par exemple, si S = [0, 1]
2
et si U et V : (, /, P) [0, 1] sont deux v.a.
uniformes indpendantes, X = (U, V ), X = (U, U), (U, V ), (U
2
, V ) sont
des PP sur S mais X = (U
n
, V
m
), n, m N ne lest pas car 0 est p.s. un
point daccumulation de X.
Dans cette dnition, S peut tre remplac par un espace mtrique com-
plet gnral. Notons que la ralisation dun processus ponctuel est au plus
innie dnombrable et sans points daccumulation. Si S est borne, N
X
(S)
est presque srement nie et le PP est dit ni. On ne considrera ici que des
PP simples nautorisant pas la rptition de points : dans ce cas, la ralisation
x du PP concide avec un sous-ensemble de S.
3.1.1 Espace exponentiel
Si S est borne, lespace E des congurations des tats dun PP X sur S
sidentie avec la runion des espaces E
n
des congurations n points sur
S, n 0 : E =
n0
E
n
, appel lespace exponentiel des congurations,
est muni de la tribu c qui rend mesurables toutes les variables de comptage
N(A) : E N, N(A) = (x A) o A B
b
(S). La tribu c
n
sur E
n
est la
trace de c sur E
n
. Des exemples dvnements de c sont : il y a au plus 50
points dans la conguration x ; les points de x sont tous distants dau moins
r, r > 0 donn ; 0 est un point de x, il ny a aucun point dans A S.
La loi du processus ponctuel X est la probabilit P image sur (E, c)
de P. Cette loi est caractrise sur la sous-tribu de / qui rend mesurable
toutes les variables de comptage N(A), A B
b
(S), par les lois jointes nies-
dimensionnelles de ces variables.
Dnition 3.2. La distribution ni-dimensionnelle dun processus ponctuel
X est la donne pour tout m 1 et tout m-uplet (A
1
, A
2
, . . . , A
m
) de B
b
(S)
des distributions sur N
m
de (N(A
1
), N(A
2
), . . . , N(A
m
)).
Si S nest pas compacte, la loi dun PP est dnie de la mme faon, les
congurations x (ventuellement innies) tant nies sur tout borlien born.
PP stationnaire, PP isotropique
Un PP sur R
d
est stationnaire si, pour tout R
d
, la loi du PP translat
X
= X
i
+ est la mme que celle de X ; le PP est isotropique si la loi
de X, X aprs -rotation, est identique celle de X pour toute rotation .
Lisotropie implique la stationnarit.
86 3 Processus ponctuels spatiaux
Processus ponctuel marqu
Soit K un espace mtrique (en gnral K R
m
) ; un processus ponctuel
marqu (PPM) (X, M) sur S K est un PP sur S K tel que X soit un PP
sur S : (x, m) = (x
1
, m
1
), (x
2
, m
2
), . . . o m
i
K est la marque associe
au site x
i
. Des exemples despace de marques sont : K = m
1
, m
2
, . . . , m
K
(K types de points, cf. Fig. 3.2-a), K = R
+
(la marque est une mesure r 0
associe chaque point, cf. Fig. 3.2-b), K = [0, 2[R
+
(la marque est un
segment centr en x, dorientation [0, 2[ et de longueur l 0).
Notons B(x, r) S la boule de R
2
de centre x et de rayon r > 0. Un
exemple de PP marqu est la donne de centres X = x
i
R
2
, ralisations
dun PP et de marques les boules fermes B(x
i
, r
i
) centres en x
i
et de rayons
suivant des lois i.i.d., lois elles-mmes indpendantes de X. En morphologie
mathmatique [197; 204], lensemble alatoire ferm A =
xiX
B(x
i
, r
i
) est
appel un processus boolen.
Un PP marqu de bres [204] est associ des marques curvilignes m
i
attaches x
i
, par exemple un segment centr en x
i
, de longueur l
i
cxp(l
1
)
et dorientation
i
uniforme sur [0, 2[ indpendante de l
i
, les (
i
, l
i
) tant
i.i.d. et indpendantes de X ; de tels PPM sont utiliss en science du sol pour
modliser la rpartition spatiale dun rseau racinaire dans un volume S R
3
.
Un PP multivari X = (X(1), X(2), . . . , X(M)) peut tre vu comme un
PPM nombre ni M de marques : pour chaque m = 1, . . . , M, X(m) est le
sous-ensemble de S qui repre les positions de lespce m. X sidentie alors au
4800 5000 5200 5400
4
2
0
0
4
3
0
0
4
4
0
0
4
5
0
0
4
6
0
0
4
7
0
0
4
8
0
0
humberside
0 50 100 150 200
0
5
0
1
0
0
1
5
0
2
0
0
x
y
(a) (b)
Fig. 3.2. (a) Un exemple de PP 2 marques (donnes humberside du package
spatstat) : localisations de 62 cas () de leucmie chez lenfant (district de North-
Humberside, Grande Bretagne, priode 19741982) et de 141 rsidences () den-
fants non-malades tires au hasard dans le registre des naissances. (b) Un exemple
de PP marques continus (donnes longleaf de spatstat) : positions et tailles
de 584 aiguilles de pins dans un sous-bois, la taille dune aiguille de pin tant ici
proportionnelle au rayon du cercle.
3.1 Dnitions et notations 87
processus PPM
X =
M
m=1
X(m) superposition des X(m). La Fig. 3.2 donne la
ralisation dun PPM deux tats, sain ou malade, rpartition gographique
de cas de leucmie chez lenfant (cf. [53] et lexercice 5.14).
3.1.2 Moments dun processus ponctuel
Si les moments dordre 1 (esprance) et dordre 2 (covariance) sont la base
de ltude des processus valeurs relles, ici les notions adaptes aux PP sont
les mesures de moment dordre p, p 1 : le moment dordre p dun PP est la
mesure sur (S, B(S))
p
dnie sur les produits B
1
. . . B
p
par :
p
(B
1
. . . B
p
) = E(N(B
1
) . . . N(B
p
)).
Moment dordre 1 et intensit dun PP
La mesure dintensit de X est la mesure de moment dordre 1 :
(B) =
1
(B) = E(N(B)) = E
X
1( B).
Gnralement, (d), la probabilit quil y ait un point de X dans le volume
innitsimal d autour de , est modlise partir dune densit dintensit
(), (d) = ()d. Si X est stationnaire, est invariante par translation :
(B) = (B) o , lintensit constante de X, est le nombre moyen de points
de X par volume unit.
Moment factoriel et intensit
2
dordre 2
La covariance de variables de comptage va sexprimer partir de la mesure
de moment dordre 2,
2
(B
1
B
2
) = E(N(B
1
)N(B
2
)). Cependant, notant
=
,X
la somme tendue aux sites ,= distincts de X, la dcomposition,
2
(B
1
B
2
) = E
X
1( B
1
)
X
1( B
2
)
= E
,X
1((, ) (B
1
, B
2
))
= E
X
1( B
1
B
2
) +E
=
,X
1((, ) (B
1
, B
2
)),
montre que
2
a une composante mesure sur B(S) et une autre mesure sur le
produit B(S) B(S). Cette singularit disparat en considrant la mesure de
moment factoriel
2
dordre 2 dnie sur les vnements B
1
B
2
par :
2
(B
1
B
2
) = E
=
,X
1((, ) (B
1
, B
2
))
=
2
(B
1
B
2
) (B
1
B
2
).
88 3 Processus ponctuels spatiaux
2
concide avec
2
sur le produit dvnements disjoints, (,
2
) apportant
la mme information sur X que (,
2
).
Si h
1
: R
d
[0, ) et h
2
: R
d
R
d
[0, ) sont deux applications
mesurables, un argument classique de la thorie de la mesure [160, Appendice
C] conduit aux identits :
E
X
h() =
_
R
d
h
1
()(d),
et
E
=
,X
h
2
(, ) =
_
R
d
_
R
d
h(, )
2
(d, d).
Dautre part, si B
1
et B
2
sont mesurables bornes de S, il est facile de voir
que :
Cov(N(B
1
), N(B
2
)) =
2
(B
1
B
2
) +
1
(B
1
B
2
)
1
(B
1
)
1
(B
2
).
Si ,= ,
2
(dd) est la probabilit que X prsente un point dans le volume
innitsimal d autour de et un point dans le volume innitsimal d autour
de . Si
2
est absolument continue par rapport la mesure de Lebesgue sur
(S, B(S))
2
, sa densit
2
(, ) est la densit dintensit dordre deux de X. Si
X est stationnaire (resp. isotropique),
2
(, ) ne dpend que de (resp.
| |).
Corrlation de paires repondre
Lune des questions centrales dans ltude des processus ponctuels est de sa-
voir si les points de la ralisation dun PP ont une tendance sattirer ou
au contraire se repouser ou enn ne pas sinuencer. Cette dernire hypo-
thse dindpendance spatiale, que nous noterons CSR (pour Complete Spatial
Randomness), traduit que les points se rpartissent dans S indpendamment
les uns des autres, mais pas ncessairement uniformment. Les PP de Poisson
(PPP) couvrent exactement cette classe de processus, les PPP stationnaires
correspondant la situation o la densit est constante.
Sans faire dhypothse de stationnarit, Baddeley et al. [13] dnissent une
fonction g(, ), dite fonction de corrlation de paires repondre, qui est un
bon indicateur au second ordre de la dpendance spatiale : si () et () > 0,
g(, ) =
2
(, )
()()
. (3.1)
Il est facile de voir que
g(, ) = 1 +
Cov(N(d), N(d))
()(v)dd
,
3.1 Dnitions et notations 89
ce qui conduit linterprtation :
1. g(, ) = 1 si les points apparaissent indpendamment (hypothse CSR).
2. g(, ) > 1 traduit une attraction entre les points (covariance de paire
positive).
3. g(, ) < 1 traduit une rpulsion entre les points (covariance de paire
ngative).
On dira que le PP X est stationnaire au second ordre pour la corrlation
repondre si :
, S : g(, ) = g( ). (3.2)
On verra que des PP (par exemple des PP de Cox log-gaussiens) peuvent
tre stationnaires au second ordre pour la corrlation repondre sans tre
stationnaire au premier ordre. Cette corrlation g permettra de construire des
tests dindpendance spatiale sans faire lhypothse que lintensit du PP est
stationnaire.
Comme pour les processus valeurs relles, les mesures de moments
lordre 1 et 2 de deux PP peuvent concider mais leurs congurations spatiales
tre assez direntes : en eet la loi dun PP dpend aussi des mesures de
moments dordres suprieurs.
3.1.3 Exemples de processus ponctuels
Modle dni par ses densits conditionnelles n(x) = n 0
Si S est borne, la loi de X peut tre dcrite en se donnant :
1. Les probabilits p
n
= P(N(S) = n) quune conguration soit n points,
n 0.
2. Les densits g
n
de x sur E
n
, lensemble des congurations n points,
n 1.
Une densit g
n
sur E
n
est en bijection avec une densit f
n
(relative la mesure
de Lebesgue) sur S
n
invariante par permutation des coordonnes :
f
n
(x
1
, x
2
, . . . , x
n
) =
1
n!
g
n
(x
1
, x
2
, . . . , x
n
).
Notant B
n
= (x
1
, x
2
, . . . , x
n
) S
n
t.q. x
1
, x
2
, . . . , x
n
B
n
lvnement
associ B
n
c
n
, la probabilit de B =
n0
B
n
est alors donne par :
P(X B) =
n0
p
n
_
B
n
f
n
(x
1
, x
2
, . . . , x
n
)dx
1
dx
2
. . . dx
n
.
Linconvnient dune telle approche est que les probabilits p
n
doivent tre
spcifes, ce qui est peu raliste dans la pratique. On verra que lorsque X est
dni par une densit jointe inconditionnelle f (cf. 3.4), les p
n
sont implici-
tement donnes par f.
90 3 Processus ponctuels spatiaux
Points indpendants : processus binomial n points
Soit S une partie borne de R
d
de volume (S) > 0. Un PP binomial sur
S n points est constitu de n points i.i.d. uniformment rpartis sur S : si
A
1
, A
2
, . . . , A
k
est une partition borlienne de S, alors la variable alatoire
(N(A
1
), N(A
2
), . . . , N(A
k
)) suit une loi multinomiale /(n; q
1
, q
2
, . . . , q
k
) de
paramtres q
i
= (A
i
)/(S), i = 1, . . . , k. Ce modle stend aux rpartitions
i.i.d. de n points sur S, chaque point tant plac dans S avec une densit non
ncessairement uniforme : une telle rpartition conditionnelle n(x) = n
points est celle dun PP de Poisson n points dintensit (cf. 3.2).
Plus de rgularit spatiale : le modle noyau dur
Une faon de rgulariser une conguration spatiale est dinterdire que des
points soient trop proches. Ce qui est bien adapt chaque fois quun individu
i plac en x
i
ncessite un espace propre : modles de sphres impntrables
en physique, rpartition darbres dans une fort, rpartition danimaux sur
un territoire, centres de cellules dun tissu cellulaire, rpartition dun type de
commerce dans une ville. Ces modles sont des cas particuliers du modle de
Strauss, un modle de Gibbs dni par sa densit inconditionnelle (cf. 3.4.2).
Rpartition avec agrgats : le PP de Neyman-Scott
Plaons-nous dans le contexte suivant dune dynamique de population :
1. X, qui repre la position des parents, est un PP de Poisson.
2. la gnration suivante, chaque parent x
i
engendre des descendants Y
xi
en nombre K
xi
et en position Y
xi
autour de x
i
, les variables (K
xi
, Y
xi
)
tant i.i.d. et indpendantes de X.
Le processus de Neyman-Scott [163] est alors la superposition D =
xix
Y
xi
des descendants de la premire gnration (cf. Fig. 3.4). Ce modle prsente
des agrgats autour des parents si les lois de rpartition spatiale des descen-
dants sont concentres autour des parents. Les gnralisations de ce modle
sont multiples : autre choix de rpartition spatiale des parents X, dpendances
entre les descendants (comptitions), lois de descendance non-identiques (va-
riabilit de fertilit parentale), etc. On verra que ces modles rentrent dans la
classe des PP de Cox (cf. 3.3).
On distingue trois grandes classes de PP :
1. Les PP de Poisson (PPP) modlisent une rpartition spatiale au hasard
(CSR, cf. Fig. 3.3-a). Ils sont caractriss par leur intensit (), qui nest
pas ncessairement homogne.
2. Les PP de Cox sont des PPP conditionnels un environnement alatoire.
Ils modlisent des rpartitions spatiales moins rgulires prsentant par
exemple des agrgats, comme pour le PP de Neyman-Scott (cf. Fig. 3.4).
3.1 Dnitions et notations 91
10 20 30 40
0
1
0
2
0
3
0
4
0
x
y
0 10 20 30 40
0
1
0
2
0
3
0
4
0
x
y
(a) (b)
Fig. 3.3. Comparison des deux rpartitions spatiales de n = 70 points sur S =
[0, 40]
2
. (a) Au hasard : ralisation dun PP binomial ; (b) plus rgulire : ralisation
dun PP noyau dur avec linterdition que les points soient plus proche que 3.5.
4 2 0 2 4
2
0
2
x
y
6 4 2 0 2 4 6
2
0
2
x
y
(a) (b)
Fig. 3.4. (a) Donnes relles : localisations de 126 pins dune fort nlandaise
(donnes finpines de spatstat) ; (b) simulation dun processus de Neyman-Scott
ajust sur les donnes (a) o : le nombre de descendants K P() ; la position dun
descendant () autour dun parent () suit une loi N2(0,
2
I2). Les paramtres
estims par la mthode dcrite au 5.5.3 sont = 0.672,
= 1.875,
2
= 0.00944.
3. Les PP de Gibbs sont dnis partir dune spcication conditionnelle.
Ils sont utiles pour modliser des rpartitions spatiales plus rgulires que
celle dun PPP, par exemple la rpartition dun modle noyau dur o
chaque point prserve un espace vital autour de lui (cf. Fig. 3.3-b et 3.4).
92 3 Processus ponctuels spatiaux
3.2 Processus ponctuel de Poisson
Soit une mesure positive sur (S, B(S)) de densit , tant nie sur les bor-
liens borns. Un processus ponctuel de Poisson de mesure dintensit () > 0
et dintensit () (on note PPP() ou PPP()) est caractris par :
1. Pour tout A B
b
(S) de mesure 0 < (A) < , N(A) suit une loi de
Poisson de paramtre (A).
2. Conditionnellement N(S), les points de x A sont distribus de faon
i.i.d. avec une densit proportionnelle (), A :
P(N(A) = n) = e
(A)
((A))
n
n!
et
g
n
(x
1
, x
2
, . . . , x
n
) (x
1
)(x
2
) . . . (x
n
).
Cette caractrisation implique que, si A
i
, i = 1, . . . , p sont p borliens dis-
joints, les v.a. N(A
i
), i = 1, . . . , p sont indpendantes. Le PPP est homogne
dintensit , si () = () ; lindpendance dans la rpartition sajoute
alors luniformit de la rpartition spatiale.
Un choix classique de modlisation de () 0 est un modle log-linaire
dpendant de covariables z(), S, observables :
log () =
t
z(), R
p
.
Simulation dun processus de poisson. La simulation dun PPP() sur une
partie borne S (cf. Fig. 3.5) est ralise en utilisant la mthode de rejet (cf.
appendice A) ou deacement de points : si la densit () est majore par
c < sur S, lalgorithme suivant ralise la simulation dun PPP() sur S
(cf. Ex. 3.8) :
Fig. 3.5. Ralisations dun PPP inhomogne sur [0, 1]
2
dintensit : (a) (x, y) =
400e
3x
(E(N(S)) = 126.70) ; (b) (x, y) = 800 |0.5 x| |0.5 y| (E(N(S)) = 50).
3.3 Processus ponctuel de Cox 93
1. Simuler X
h
= x
i
, un PPP homogne sur S dintensit c.
2. Effacer indpendamment les x
i
avec la probabilit
(1 (x
i
)/c).
3.3 Processus ponctuel de Cox
Soit = (())
S
un processus 0 sur S localement intgrable : presque
surement, pour tout borlien B born,
_
B
()d < . Un processus ponctuel
de Cox X gouvern par = (())
S
est un PPP de densit alatoire ,
modlisant un environnement alatoire. Si la densit est stationnaire, X
lest aussi. Lexemple le plus simple de processus de Cox est le PPP mixte
o () = est une v.a. > 0 constante sur S. Les processus de Cox sintro-
duisent naturellement dans un contexte baysien o lintensit
() dpend
dun paramtre suivant une loi a priori .
3.3.1 Processus de Cox log-Gaussien
Introduit par Moller et al. [159], ces modles admettent une intensit log-
linaire avec eet alatoire :
log () =
t
z() +(), (3.3)
o = (())
S
est un processus gaussien centr de covariance c(, ) =
Cov((), ()) assurant lintgrabilit locale de . La Fig. 3.6 donne la ra-
lisation dun tel modle pour deux choix de covariance du champ sous-jacent.
Les mesures de moments de ces processus se manipulent bien ; en particulier,
on a [159] :
Fig. 3.6. Deux rpartitions spatiales dun PP de Cox log-gaussien avec
t
z() = 1,
= 1. Le fond gris gure lintensit de la ralisation du champ gaussien sous-jacent
de covariance : (a) c(, ) = 3 exp{ /10} ; (b) c(, ) = 3 exp{
2
/10}.
94 3 Processus ponctuels spatiaux
log () =
t
z() +c(, )/2, g(, ) = exp(c(, )),
o g est la corrlation de paire repondre (3.1), la correspondance entre c et
g tant bijective. Si est stationnaire (resp. isotropique), X est stationnaire
(resp. isotropique) au second ordre pour la corrlation repondre g.
3.3.2 PP doublement poissonnien
Encore appels shot noise process, ce sont des processus de Cox X dintensit
() =
(c,)
k(c, ), (3.4)
o est la ralisation dun PPP sur S R
+
, k(c, ) tant une densit sur S
centre en c. Ainsi, X est la superposition de PPP indpendants dintensit
k(c, ) pour une rpartition de Poisson des (c, ). Ces PP doublement poisso-
nien modlisent des congurations avec agrgats comme la rpartition dune
espce vgtale rsultant dun processus de dissmination de graines.
Pour le processus de Neyman-Scott [163 et 3.1.3], les centres c suivent
un PP de Poisson stationnaire dintensit et est constant, correspondant
au nombre moyen de descendants issus de chacun des parents placs en c. Le
processus de Neyman-Scott est stationnaire dintensit . Le PP de Thomas
[213] correspond une loi de dispersion gaussienne k(c, ) ^
d
(c,
2
Id) au-
tour de chaque centre c. Un processus de Thomas est isotropique de corrlation
repondre sur R
2
[160],
g(, ) = g(|, |), g(r) = 1 +
1
4
2
exp
_
r
2
4
2
_
.
On peut galement considrer des modles inhomognes o la mesure qui
gouverne X dpend de covariables z(), S [220],
() = exp(
t
z())
(c,)
k(c, ).
Ce modle, de mme corrlation de paires repondres g que (3.4), permet
dtudier les proprits de dpendance au second ordre tout en autorisant une
non-homognit au premier ordre (cf. exemple 5.15).
3.4 Densit dun processus ponctuel
On supposera dans ce paragraphe que S est une partie borne de R
d
. Une faon
de modliser un PP est de dnir sa densit de probabilit f relativement
celle dun PP de Poisson homogne de densit 1. Cette approche permet en
particulier de dnir les PP de Gibbs.
3.4 Densit dun processus ponctuel 95
Gnralement, la densit f dun PP nest connue qu un facteur multi-
plicatif prs, f(x) = cg(x), o g est analytiquement connue. Ceci est sans
consquence uant la simulation dun PP par une mthode MCMC, mthode
qui requiert la seule connaissance de g (cf. 4.4). Par contre, pour lestima-
tion par maximum de vraisemblance du modle f
(x) = c()g
(x), c(), qui
est une constante analytiquement incalculable, devra tre approche par m-
thode MCMC (cf. 5.5.6).
3.4.1 Dnition
Soit S R
d
un borlien born et Y
un PPP de mesure dintensit > 0,
admettant une densit . Le dveloppement de Poisson suivant donne la
probabilit de tout vnement (Y
F),
P(Y
F) =
n=0
e
(S)
n!
_
S
n
1x F(x
1
)(x
2
) . . . (x
n
)dx
1
dx
2
. . . dx
n
,
o x = x
1
, x
2
, . . . , x
n
. Cette formule permet de dnir la densit dun PP
par rapport la loi de Y
1
, un PPP(1). Soit la mesure de Lebesgue sur S.
Dnition 3.3. X admet la densit f par rapport Y
1
, le PPP dintensit
1, si pour tout vnement F c, on a :
P(X F) = E[1Y
1
Ff(Y
1
)]
=
n=0
e
(S)
n!
_
S
n
1x Ff(x)dx
1
dx
2
. . . dx
n
.
La probabilit dune conguration n points est donc :
p
n
=
e
(S)
n!
_
S
n
f(x)dx
1
dx
2
. . . dx
n
.
Conditionnellement n(x) = n, les n points de X ont une densit jointe
symtrique f
n
(x
1
, x
2
, . . . , x
n
) f(x
1
, x
2
, . . . , x
n
) : f
n
nest connue qu
un facteur multiplicatif prs et p
n
est analytiquement incalculable du fait de
la complexit du calcul de lintgrale multiple. Lune des rares densits qui
sexplicite compltement est celle du PPP(),
f(x) = e
(S)(S)
n
i=1
(x
i
), (3.5)
si x = x
1
, x
2
, . . . , x
n
. En gnral, on crira f(x) = cg(x) o g(x) est connue
et c est une constante de normalisation inconnue.
96 3 Processus ponctuels spatiaux
Intensit conditionnelle de papangelou
Une densit f est hrditaire si, pour toute conguration nie de points x S,
f(x) > 0 et y x = f(y) > 0. (3.6)
Cette condition, vrie pour les densits usuelles, traduit que toute sous-
conguration dun conguration de densit > 0 est elle-mme de densit > 0.
Si f est hrditaire, lintensit de Papangelou [168] de / x conditionnelle
x est dnie par :
(, x) =
f(x )
f(x)
si f(x) > 0, (, x) = 0 sinon. (3.7)
Si f(x) = c g(x), (, x) ne dpend pas de la constante de normalisation c.
Dautre part, (3.7) montre que la correspondance entre f et est bijective :
un PP peut donc tre modlis par son intensit conditionnelle et cette in-
tensit sera utilise pour les procdures de simulation MCMC ainsi que pour
lestimation paramtrique par pseudo-vraisemblance conditionnelle.
(, x) peut tre interprte comme tant la densit de la probabilit quil
y ait un point de X en , sachant que la ralisation de X est x ailleurs,
lesprance en X de cette probabilit conditionnelle tant la densit () de
X en [160]
E((, X)) = ().
Pour un PPP(), (, x) = ne dpend pas de x; pour les PP markoviens,
lintensit conditionnelle (, x) = (, x ) ne dpendra que de la con-
guration x au voisinage de (cf. 3.6.1).
3.4.2 Processus ponctuel de Gibbs
On suppose que X admet une densit f > 0 :
f(x) = expU(x)/Z, (3.8)
lnergie U(x) tant admissible, c--d vriant pour tout n 0 :
q
n
=
_
S
n
exp(U(x))dx
1
dx
2
. . . dx
n
< ,
n=0
e
(S)
n!
q
n
< .
Pour tre admissible, U doit ltre conditionnellement n(x) = n, ceci pour
tout n. Une condition susante est que n(x) soit born par un n
0
< et que
U soit admissible conditionnellement tout n n
0
; par exemple, les modles
noyau dur excluant les congurations x o deux sites sont distance r,
r > 0, ont toujours un nombre de points n(x) born : en eet, sur R
2
, si
n(x) = n, la surface de la runion des n boules centres en x
i
x de rayon r
3.4 Densit dun processus ponctuel 97
ne peut excder celle de S
r
, le domaine S dilat de r : n(x) r
2
(S
r
).
Une autre condition assurant que U est admissible est que U soit borne.
Si lnergie est spcie laide dun potentiel , c--d si U scrit,
U(x) =
yx
(y),
on dit que X est un PP de Gibbs de potentiel . Un cas particulier est celui
dune famille exponentielle de densit,
f
(x) = c() exp(
t
T(x)).
o R
p
un paramtre rel multidimensionnel et T(x) =
yx
(y) est une
statistique de R
p
.
PP de Strauss, PP noyau dur
Lexemple de base dun PP de Gibbs est associ des potentiels de singletons
et de paires, lnergie scrivant :
U(x) =
n
i=1
(x
i
) +
n
i=1
n
j>i
(|x
i
x
j
|).
Si r > 0 est un rayon x, le PP de Strauss [206] correspond au choix (x
i
) = a
et
{xi,xj}
(x) = b1(|x
i
x
j
| r), de densit f
(x) = c() exp(
t
T(x)) de
paramtre = (a, b) R
2
o :
T
1
(x) = n(x), T
2
(x) = s(x) =
i<j
1(|x
i
x
j
| r).
T
2
compte le nombre de paires de points r-voisins. Notant = e
a
et = e
b
,
la densit f scrit encore :
f
(x) = c()
n(x)
s(x)
, =
t
(, ). (3.9)
Le PP de Poisson homogne correspond = 1 alors que = 0 dnit le
modle noyau dur, de densit :
f
,r
(x) = c
n(x)
1i ,= j, |x
i
x
j
| > r.
Lindicatrice qui apparat dans la densit noyau dur exclut toute congu-
ration avec une paire de points distance r (modles de sphres imp-
ntrables) ; S tant born, le nombre n(x) de points de la conguration est
born.
Dcrivons les distributions conditionnelles (cf. Fig. 3.7-a,b) et incondition-
nelles (cf. Fig. 3.7-c,d) du PP de Strauss.
98 3 Processus ponctuels spatiaux
0 2 4 6 8 10
0
2
4
6
8
1
0
x
y
0 2 4 6 8 10
0
2
4
6
8
1
0
x
y
(a) (b)
0 2 4 6 8 10
0
2
4
6
8
1
0
0 2 4 6 8 10
0
2
4
6
8
1
0
(c) (d)
Fig. 3.7. Ralisations dun PP de Strauss sur S = [0, 10]
2
, r = 0.7 : conditionnelles
n = 80, (a) = 0, (b) = 1.5 ; inconditionnelles avec = 2, (c) = 0 (noyau
dur), (d) = 0.8.
Conditionnellement n(x) = n, f
,n
(x)
s(x)
:
Si < 1, le processus X est plus rgulier quun PP binomial, dautant
plus que est proche de 0.
= 1 correspond au processus binomial n points.
Si > 1, X est moins rgulier quun PP binomial, dautant plus que
est grand : des agrgats apparaissent.
Inconditionnellement, f
nest admissible que si 1. En eet :
si 1 et si n(x) = n, f
(x) c()
n
et :
n0
1
n!
_
S
n
f
(x)dx
1
. . . dx
n
c()
n0
1
n!
n
((S))
n
= e
(S)
< +;
si > 1, f
nest pas admissible : en eet, notant E lesprance pour la
loi uniforme sur S
n
, lingalit de Jensen donne,
3.4 Densit dun processus ponctuel 99
1
(S)
n
_
S
n
s(x)
dx
1
. . . dx
n
= E(
s(X)
)
exp E(bs(X)) = exp
n(n 1)
2
bp(S),
o p(S) = P(|X
1
X
2
| < r) si X
1
et X
2
sont i.i.d. uniformes sur S.
Il est facile de voir que p(S) > 0 et que
u
n
est divergente, o
u
n
=
((S))
n
n!
n(n1)bp(S)/2
.
Plusieurs gnralisations du PP de Strauss sont possibles :
1. En interdisant les paires de points dirents distance moindre que r
0
,
0 < r
0
< r (processus de Strauss noyau dur) :
s(x) =
i<j
1(r
0
|x
i
x
j
| r).
Le nombre de points de toute ralisation x tant born, la densit est
toujours admissible ;
2. En saturant la statistique n
xi
(x) =
x: =xi
1
xir
une valeur
0 < < prdtermine : si g(x) =
xix
min, n
xi
(x), la densit
f
(x) = c()
n(x)
g(x)
est toujours admissible (processus de saturation de Geyer, [87]).
3. En modlisant le potentiel de paire par une fonction en escalier k
marches :
(x
i
, x
j
) =
k
si d(x
i
, x
j
) (r
k1
, r
k
], (x
i
, x
j
)=0 sinon, k = 1, . . . , p,
pour un choix prdtermin de seuils r
0
= 0 < r
1
< r
2
< ... < r
p
= r,
p 1. Si s
k
(x) est le nombre de paires de points ,= de x distance dans
(r
k1
, r
k
] , k = 1, . . . , p, la densit appartient la famille exponentielle,
f
(x; ,
1
, ...,
p
) = c()
n(x)
p
k=1
s
k
(x)
k
f
est admissible ssi
1
1.
4. En faisant intervenir les triplets de points de x deux deux distants de
moins de r : si t(x) compte ces triplets, la densit
f
(x) = c()
n(x)
s(x)
t(x)
est admissible ssi et 1.
100 3 Processus ponctuels spatiaux
Fig. 3.8. Une ralisation de lensemble B(x) permettant de dnir laire a(x) et le
nombre de composantes connexes c(x) (ici c(x) = 19).
PP interaction daire ou interaction de connexit
Les PP de Gibbs interaction daire ou interaction de connexit sont
dautres alternatives qui permettent de modliser, sans contrainte sur les pa-
ramtres, des rpartitions plus ou moins rgulires [17; 217]. Leur densit est
de la forme,
f
(x) = c
n(x)
h(x)
,
o h reste dnir. Pour r > 0, notons B(x) =
xix
B(x
i
, r/2)S la runion
(limite S) des boules de centres x
i
x et de rayons r, a(x) laire de B(x) et
c(x) le nombre de ses composantes connexes (cf. Fig. 3.8). Le PP interaction
daire correspond au choix h(x) = a(x), celui du PP interaction de connexit
au choix h(x) = c(x).
S tant borne et r > 0, les fonctions a et c sont bornes et les deux den-
sits sont admissibles sans contrainte sur les paramtres (, ). Pour chacun
des deux modles, la rpartition spatiale sera plus (resp. moins) rgulire si
< 1 (resp. > 1), = 1 correspondant un PP de Poisson homogne
dintensit . Une dicult dans lutilisation de ces modles rside dans le
calcul numrique de a(x) et de c(x), calcul qui ncessite de passer par des
techniques de discrtisation appropries.
3.5 Distances au plus proche voisin dun PP
Les distances aux plus proches voisins (ppv) sont des statistiques utiles pour
tester lhypothse CSP dindpendance des points dun PP spatial. Leurs lois
sont lies la notion de mesures de Palm du PP dont nous donnons ici une
approche heuristique.
3.5 Distances au plus proche voisin dun PP 101
3.5.1 Les mesures de Palm
Soit X un PP sur S de loi P. La probabilit de Palm P
de X au point est
la loi de X conditionnelle la prsence dun point de X en :
F c : P
(F) = P(F[ X).
La mesure de Palm P
permet de dnir les statistiques conditionnelles la
prsence dun point de X en : par exemple la distance au plus proche voisin
de X, d(, X) = inf X et ,= [ X, ou encore le nombre de
points de la conguration dans la boule B(, r) sachant que X.
La dicult pour dnir P
tient au fait que lvnement conditionnant
X est de probabilit nulle : lapproche heuristique consiste condi-
tionner par lvnement X B(, ) ,= , de probabilit > 0 si > 0 et
si la densit dordre un de X est > 0, puis de voir si, pour F un vnement
extrieur , la probabilit conditionnelle,
P
,
(F) =
P(F X B(, ) ,= )
P(X B(, ) ,= )
admet une limite lorsque 0. Si la limite existe, cest la mesure de Palm
P
; par exemple, si X est un PPP, les deux vnements apparaissant au nu-
mrateur sont indpendants pour petit et donc P
,
vaut P : linterprtation
est que pour un PPP, conditionner ou non par la prsence dun point de X
en est sans consquence sur la probabilit des vnements ailleurs quen .
3.5.2 Deux distances au ppv de X
On distingue deux distances au ppv de X : celle dun point de la ralisation
de X son ppv et celle dun point courant de S au ppv de X(cf. Fig. 3.9).
Fig. 3.9. Les deux distances aux ppv. Les () sont les points observs du processus
ponctuel (ici n(x)=7), les () sont les points chantillonns (ici, 2 sites). En continu :
distance dun vnement lvnement le plus proche. En tirets : distance dun site
chantillonn a lvnement le plus proche.
102 3 Processus ponctuels spatiaux
Distance dun point X son ppv dans X
La distance d(, X) dun point X son ppv dans X a pour fonction
de rpartition G
:
G
(r) = P
(d(, X) r), X, r 0.
Si X est stationnaire, G
= G est indpendante de . Si X est un PPP()
homogne sur R
2
, N(B(, r)) tant une loi de Poisson de paramtre r
2
,
G(r) = P(N(B(, r)) = 0) = 1 expr
2
; G est desprance (2
)
1
et
de variance
1
(
1
0.25).
Distance dun point courant u son ppv dans X
La distance d(, X) dun point X au ppv de X doit tre distingue
de la distance d(u, X) dun point courant u R
d
(qui nappartient pas n-
cessairement X) au ppv de X. La distribution de cette deuxime distance
est :
F
u
(r) = P(d(u, X) r), u S, r 0. (3.10)
Si X est stationnaire, F
u
= F. Si de plus X est un PPP homogne, G(r) =
F(r). Un indicateur du caractre poissonnien de X est alors donn par la
statistique J :
J(r) =
1 G(r)
1 F(r)
.
Si X est un PP stationnaire, J > 1, J = 1 et J < 1 indiquent respectivement
que X prsente plus, autant ou moins de rgularit quun PPP. Lestimation
de J fournira une statistique de test pour lhypothse CSR.
3.5.3 Moment rduit dordre 2
La fonction K de Ripley
Supposons que X est un PP isotropique sur R
d
dintensit . Un autre indica-
teur au second ordre de la rpartition spatiale des points de X est la fonction
K de Ripley [183], ou moment rduit dordre 2 :
K(h) =
1
[N(B(, h))], h 0,
o E
est lesprance pour la loi de Palm P
. Il y a deux interprtation de la
fonction K :
1. K(h) est proportionnelle au nombre moyen de points de X dans la boule
B(, h), non compt et sachant que X.
2.
2
K(h)/2 est le nombre moyen de paires (non ordonnes) de points di-
rents une distance h, un des points appartenant un sous-ensemble
A de surface unit.
3.5 Distances au plus proche voisin dun PP 103
Ce moyen rduit dordre 2 est invariant par eacement alatoire uniforme
des points : si les points du PP X, de moment K, sont eacs de faon i.i.d.
suivant une loi de Bernoulli, le processus rsultant X
eff
aura toujours K
comme moment rduit dordre 2.
Notant
2
(, ) =
2
(| |) la densit dordre 2 de X et b
d
le volume de
la sphre unit de R
d
, on a :
K(h) =
d b
d
_
h
0
d1
2
()d.
En particulier, en dimension d = 2,
2
K(h) = 2
_
h
0
u
2
(u)du,
2
(h) =
2
2h
K
(h). (3.11)
Plus gnralement, Baddeley et al. [13] ont tendu le moment K la
mesure / de moment factoriel rduite dordre 2 pour un PP stationnaire X
dintensit par la formule,
2
/(B) =
1
(A)
E
,X
1[ A, B], B R
d
. (3.12)
/(B) ne depend pas de A R
d
si 0 < (A) < . / est lie la mesure de
moment factoriel dordre 2 par la formule :
2
(B
1
B
2
) =
2
_
B1
/(B
2
)d B
1
, B
2
R
d
. (3.13)
Si
2
comme K sont lies la distribution de la distance entre paires
de points, lquation (3.12) montre quelle peut tre une estimation non-
paramtrique naturelle de K (prendre pour A la fentre dobservation ; cf.
5.5.3).
Si X est un PPP homogne, le graphe de h L(h) = h est une droite ;
une fonction L concave indique des rpartitions avec agrgats ; une fonction
L convexe indique des rpartitions plus rgulires que celles dun PPP. Les-
timation de L fournit une autre statistique pour tester lhypothse CSR.
Dautre part K peut aussi tre utilise pour mettre en place une mthode
destimation paramtrique (par exemple par moindres carrs, cf. 5.5.4) si on
dispose de son expression analytique.
Par exemple, si X est un PPP homogne sur R
d
, K(h) = b
d
h
d
; si X
est un PP de Neyman-Scott sur R
d
o la position des parents suit un PPP()
homogne, chaque parent engendrant un nombre alatoire N de descendants
de lois de dispersion autour dun parent densit isotropique k() = g(||),
alors, posant G(h) =
_
h
0
g(u)du [48] :
K(h) = b
d
h
d
+
E(N(N 1))G(h)
[E(N)]
2
.
104 3 Processus ponctuels spatiaux
Un deuxime indicateur du caractre poissonnien dun PP est la fonction,
L(h) =
_
K(h)
b
d
_
1/d
.
La fonction K
BMW
de Baddeley-Moller-Waagepetersen
Supposons que X soit un PP stationnaire au second ordre pour la corrlation
repondre g (cf. (3.1) et (3.2)) : g(, ) = g( ). Baddeley et al. [13] ont
tendu le moment rduit dordre 2 de Ripley :
K
BMW
(h) =
_
R
d
1|| hg()d =
1
(B)
E
,XB
1| | h
()()
.
(3.14)
La premire galit est rapprocher des quations (3.11) (en dimension d = 2)
et (3.13) (en gnral). La deuxime galit ouvre sur une estimation non-
paramtrique naturelle de K
BMW
(h) (cf. (5.5.3)).
3.6 Processus ponctuel de Markov
La notion de PP de Markov a t introduite par Ripley et Kelly [186]. Sa
gnralisation la proprit de Markov aux plus proches voisins est due
Baddeley et Mller [12].
3.6.1 Proprit de Markov au sens de Ripley-Kelly
Soit X un PP de densit f par rapport un PPP(), o est une mesure
densit positive de masse nie sur les borliens borns. Soit une relation
de voisinage symtrique sur S : par exemple, pour un r > 0 x,
r
si
| | r. Le voisinage de A S est
A = S et / A : A t.q. .
On note = si S.
Dnition 3.4. Un processus X de densit f hrditaire (3.6) est markovien
pour la relation si, pour toute conguration x de densit > 0, lintensit
conditionnelle de Papanglou (3.7) (, x) = f(x )/f(x) ne dpend que
de et de x :
(, x) =
f(x )
f(x)
= (; x ).
La proprit de Markov dit que cette intensit conditionnelle ne dpend
que des points de x voisins de .
3.6 Processus ponctuel de Markov 105
Exemples de processus ponctuel markovien
1. Le PP de Poisson dintensit ayant pour intensit conditionnelle
(u, x) () est markovien pour toute relation de voisinage sur S.
2. Le PP de Strauss (3.9), dintensit conditionnelle
(, x) = explog
xix
1|x
i
| r,
est
r
-markovien ; ses gnralisations un processus de Strauss noyau
dur et/ou ayant une fonction potentiel en escalier ou avec saturation du
potentiel dinteraction de paires (cf. 3.4.2) sont encore
r
-markovien.
3. Le processus noyau dur, dintensit conditionnelle (, x) = 1x =
, est
r
-markovien.
Par contre, comme on va le voir en 3.6.2, pour tout r > 0, le PP
interaction de connexit (cf. 3.4.2) nest pas
r
-markovien : en eet, deux
points de S pouvant tre connects dans B(x) =
xix
B(x
i
, r/2) S tout en
tant arbitrairement loigns, lintensit conditionnelle (, x) peut dpendre
de points de x arbitrairement loigns de .
La proprit de Markov (3.4), qui est locale en , stend tout borlien A
de S : si X est markovien, la loi de X A conditionnelle X A
c
ne dpend
de X A A
c
, la conguration de X sur A A
c
.
Comme pour un champ de Markov sur un rseau (cf. 2.3.2), on dispose
dun thorme de Hammersley-Cliord caractrisant la densit dun PP de
Markov en terme de potentiels dnis sur les cliques dun graphe. Une clique
pour la relation de voisinage est une conguration x = x
1
, x
2
, . . . , x
n
telle
que, pour tout i ,= j, x
i
x
j
, avec la convention que les singletons soient aussi
des cliques. Notons ( la famille des cliques de (S, ).
Proposition 3.1. [186; 217] Un PP de densit f est markovien pour la rela-
tion si et seulement sil existe une fonction : E [0, ) mesurable telle
que :
f(x) =
yx, yC
(y) = exp
yx, yC
(y).
= log est le potentiel dinteraction de Gibbs et lintensit conditionnelle
de Papangelou scrit :
(u, x) =
yx, yC
(y u). Sx. (3.15)
Un exemple de densit de PP de Markov interactions de paires est :
f(x) =
xix
(x
i
)
xixj , i<j
(x
i
, x
j
).
Le processus de Strauss correspond aux potentiels
(x
i
) = et (x
i
, x
j
) =
1{xixjr}
.
106 3 Processus ponctuels spatiaux
Proprit de Markov pour un PP marqu
La dnition de la proprit de Markov et le thorme de Hammersley-Cliord
restent inchangs si Y = (X, M) est un PP marqu sur S K pour une
relation de voisinage symtrique sur SK. Si (X, M) est marques indpen-
dantes et si X est markovien pour une relation de voisinage sur S, (X, M)
est un PPM markovien pour la relation (x, m) (y, o) x y sur S.
Un exemple de modle isotrope interaction de paires et nombre ni de
marques M = 1, 2, . . . , K est donn par la densit en y = (x
i
, m
i
) :
f(y) =
mi
i<j
mi,mj
(|x
i
x
j
|).
Si, pour des rels r
kl
> 0, k, l K, k ,= l, xs,
kl
(d) 1 pour d > r
k,l
, les
conditions (1) et (2) sont vries pour la relation de voisinage :
(, m) (
, m
) |
| r
m,m
.
Y est un PPM markovien.
Dautres exemples de modlisations ponctuelles markoviennes sont prsen-
ts dans [160; 11].
Exemple 3.1. Interaction de recouvrement en foresterie
Supposons que la zone dinuence dun arbre centr en x
i
soit assimil
un disque B(x
i
; m
i
) centr en x
i
et de rayon m
i
> 0, ces rayons tant borns
par une valeur m < . Une interaction de paire traduisant une comptition
entre deux arbres i et j peut tre modlise par les potentiels de paires,
2
((x
i
; m
i
), (x
j
; m
j
)) = b (B(x
i
; m
i
) B(x
j
; m
j
)),
les potentiels de singletons valant, pour K seuils 0 = r
0
< r
1
< r
2
< . . . <
r
K1
< r
K
= m < prdtermins :
i
(x
i
; m
i
) = (m
i
) = a
k
si r
k1
< m
i
r
k
, k = 1, . . . , K
Lnergie associe est admissible si b < 0 (comptition entre les arbres), d-
nissant un PP marqu markovien sur R
2
R
+
dintensit conditionnelle,
((u, h); (x, m)) = exp(h) +b
j:xju2m
(B(u; h) B(x
j
; m
j
))
pour la relation de voisinage (x, m) (x
, m
) |x x
| 2m.
3.6.2 Proprit de Markov aux ppv
Une proprit de Markov plus gnrale, dite proprit de Markov aux plus
proches voisins (ppv) a t dveloppe par Baddeley et Mller [12]. Nous allons
3.6 Processus ponctuel de Markov 107
brivement la prsenter dans le contexte particulier dun PP interaction de
connexit (cf. 3.4.2), PP qui nest pas markovien au sens de Ripley-Kelly mais
lest pour une nouvelle relation de voisinage qui dpend de la conguration x,
la relation
x
aux x-plus ppv.
Soit x une conguration sur S, r > 0 x et B(x) =
xix
B(x
i
, r/2) S :
on dira que deux points et de x sont connects pour x si et sont dans
une mme composante connexe de B(x). On notera
x
cette relation de
voisinage :
x
est une relation sur les points de x qui dpend de x. Notons
que deux points de S peuvent tre voisins pour
x
bien quarbitrairement
loigns pour la distance euclidienne : en eet, la connexion par composantes
connexes reliera deux points sil existe une chane de r-boules centre en des
points de x et joignant lun lautre.
Soit c(x) le nombre de composantes connexes de B(x). Si S est borne, la
densit du PP interaction de connexit vaut f(x) = c
n(x)
c(x)
, et > 0
et lintensit conditionnelle de Papangelou vaut :
(, x) =
c(x{})c(x)
,
Pour voir que (, x) peut dpendre dun point x arbitrairement loign
de u dans S, on peut choisir une conguration z telle que pour x = z ,
c(z) = 2, c(x) = 1, c(x) = c(x) = 1. Ainsi, pour tout R > 0, X nest pas
markovien au sens de Ripley-Kelly pour la relation de R-voisinage habituelle.
Par contre, si x nest pas connect dans B(x), ne contribue
pas la dirence c(x ) c(x) et (, x) ne dpend pas de : X est
markovien pour la relation aux ppv par composantes connexes.
Proprit de Markov aux plus proches voisins
Soit
x
une famille de relations entre points de x, x E, le voisinage de z x
tant :
(z[x) = x : z t.q.
x
.
Un processus de densit f est dit markovien aux plus proches voisins si f est
hrditaire et si la densit conditionnelle (, x) = f(x )/f(x) ne dpend
que de et de (
x{}
) x. La densit dun processus markovien aux ppv
est encore caractrise par un thorme de Hammersley-Cliord.
Le fait que la relation de voisinage
x
dpende de la ralisation x du
processus rend plus dicile la vrication dune proprit de Markov aux ppv :
considrons par exemple une densit associe des potentiels de singletons et
de paires :
f(x) = c(, )
n(x)
xixxj
(x
i
, x
j
), (3.16)
Il faut en gnral imposer dautres contraintes sur la relation
x
pour que f
soit markovien aux ppv [12]. Ces contraintes sont implicitement vries si,
comme on vient de le voir,
x
est la relation de voisinage par composante
108 3 Processus ponctuels spatiaux
connexe, ou encore si
x
o est une relation symtrique
sur S et indpendante de x.
Donnons un autre exemple de PP markovien aux ppv.
Exemple 3.2. Relation aux ppv pour la triangulation de Delaunay
Soit x une conguration localement nie de points de S R
2
. A chaque
site x
i
on associe sa zone dinuence T
i
(x), la partie de R
2
vriant,
T
i
(x) j ,= i, | x
i
| | x
j
| .
Si x = x
1
, x
2
, . . . , x
n
, la dcomposition S =
n
i=1
T
i
(x) est appele la mo-
saque de Voronoi : sauf ventuellement au bord de la fentre dobservation
S, T
i
(x) est un polygone convexe. A cette dcomposition est associe la tri-
angulation de Delaunay de x, deux points x
i
et x
j
distincts de x tant voisins
si T
i
(x) et T
i
(x) ont une arte en commun. Ceci dnit une relation de voi-
sinage
t(x)
, la relation aux ppv pour la triangulation de Delaunay t(x) de x
(cf. Fig. 3.10)
Si et sont des potentiels de singleton et de paire borns, un modle de
PP pour cette relation aux ppv est dni par la densit de Gibbs,
f(x) = c exp
n
i=1
(x
i
) +
xi
t(x)
xj
(x
i
, x
j
).
On vrie que f est une densit markovienne au sens des ppv pour
t(x)
.
(a) (b)
Fig. 3.10. (a) Exemple de mosaque de Voronoi (en pointills) et de triangulation de
Delaunay (en tirets) associes une conguration x n = 10 points ; (b) modication
de la triangulation quand on ajoute le point .
3.6 Processus ponctuel de Markov 109
3.6.3 PP de Gibbs sur lespace R
d
Ltude de ces PP est importante pour valuer les proprits asymptotiques
destimateurs dun modle de PP observ sur tout R
d
. tant donn une re-
lation symtrique sur R
d
et x une conguration localement nie, on peut
tendre la dnition dintensit conditionnelle de Papangelou en posant
(, x) = exp
yx{}, yC
(y )
, R
d
,
o ( est la famille des cliques pour et un potentiel sur ^
R
d. Il y a plusieurs
faons de dnir un PP de Gibbs stationnaire sur R
d
[84; 165; 160] :
1. partir de spcications locales (Georgii [84]) : pour tout borlien A
born de R
d
, la loi de X A conditionnelle X A
c
ne dpend de X
A A
c
, la conguration de X sur A A
c
, de densit par rapport un
PPP(1),
(x
A
[x
A
) = Z
1
(x
A
) exp
yxAx
A
, yxA=
(y);
2. partir de reprsentations intgrales (Nguyen et Zessin [165]) : pour toute
fonction h : R
d
^
R
d [0, ),
E[
X
h(, X)] =
_
R
d
E [h(, X)(, X)] d. (3.17)
Cette reprsentation intgrale est la base de la dnition des rsidus
dun PP (cf. 5.5.7).
Spcier un PP par ses reprsentations locales soulve les mmes dicults
que celles rencontres pour un champ de Gibbs sur un rseau : existence
et/ou unicit, stationnarit, ergodicit, faible dpendance ? Il y a deux faons
daborder ces questions. Notons (() lensemble des lois des PP de Gibbs de
potentiel .
1. Si est un potentiel dinteraction de singletons et de paires invariant par
translation, (x
i
) = , (x
i
, x
j
) = g(|x
i
x
j
|), Ruelle [190] et Preston
[176] montrent que (() nest pas vide pour une large classe de fonctions
g : il sut par exemple quexistent deux fonctions g
1
et g
2
positives et
dcroissantes, g
1
sur [0, a
1
[ et g
2
sur [a
2
, [, avec 0 < a
1
< a
2
< , telles
que g(t) g
1
(t) pour t a
1
et g(t) g
2
(t) pour t a
2
et vriant,
_
a1
0
g
1
(t)dt = et
_
a2
g
2
(t) < .
2. Une deuxime approche (Klein [131]) associe univoquement X un pro-
cessus latticiel X
de potentiel
(cf. 5.5.5) et utilise les rsultats sur
les champs de Gibbs latticiels (Georgii [85]) assurant que ((
) ,= .
110 3 Processus ponctuels spatiaux
Exercices
3.1. Simulation dun point uniforme dans une boule.
1. Soient U
1
et U
2
i.i.d. uniformes sur [0, 1]. Vrier que le point de co-
ordonnes polaires (R, ) = (
U
1
, 2U
2
) est uniforme sur le disque
B
2
(0, 1) R
2
. Quel est le gain de cette procdure circulaire par rap-
port la mthode carre consistant ne retenir que les points (U
1
, U
2
) si
U
2
1
+U
2
2
1 ?
2. Proposer une mthode de simulation sphrique dun point uniforme dans
la sphre B
3
(0, 1) R
3
. Quel est son gain par rapport la mthode
cubique ?
3.2. Simulation dun point uniforme sur un borlien.
Vrier que lalgorithme suivant simule une loi uniforme sur un borlien born
W R
2
: commencer par inclure W R =
K
k=1
R
k
dans une runion nie
de rectangles R
k
dintersections deux deux de mesures nulles, puis :
1. Choisir R
k
avec la probabilit (R
k
)/(R).
2. Simuler un point x uniforme sur R
k
.
si x W, garder ce point. Sinon, retourner en 1.
3.3. Processus de Cox.
Soit X un processus de Cox sur S.
1. Montrer que X est surdispers, c.a.d. : var(N
X
(B)) E(N
X
(B)).
2. Calculer la loi de N
X
(B) pour B S si X est subordonn Z o
suit une loi (
1
,
2
).
3.4. Simulation dun PPP sur R.
Soit X = X
i
la ralisation dun PPP() homogne sur R
1
, avec les conven-
tions : X
0
= infX
i
, X
i
0 et pour tout i Z, X
i
X
i+1
.
1. Montrer que les variables X
i
X
i1
sont i.i.d. cxp().
2. Dterminer la loi des v.a. suivantes : (i) X
0
et X
1
; (ii) D
1
= infX
1
X
0
, X
0
X
1
; (iii) D
1
= infX
0
, X
1
; (iv) D
2
= distance au 2-me
ppv de X
0
.
3. Proposer des mthodes de simulation de X sur [a, b].
3.5. Distance au deuxime plus proche voisin.
Soit X un PPP homogne sur R
2
dintensit .
1. Si x
0
X et si x
1
X est le point le plus proche de x
0
, dterminer la loi
de D
2
= infd(x
0
, x), x Xx
0
, x
1
.
2. Mme question si x
0
est un point courant de R
2
.
3.6 Processus ponctuel de Markov 111
3.6. Modle de Matrn-I.
Le modle de Matrn-I [154; 48, p. 669] est un modle de type noyau dur
obtenu de la faon suivante. Soit X
0
un PPP(
0
) homogne sur R
2
et r > 0 ;
considrant toutes les paires de points de X
0
, on limine tous les points de X
0
apparaissant dans (au moins) une paire de points distance r. Le processus
rsultant X
1
est le modle Matrn-I, plus rgulier que le PPP initial et sans
points distance < r.
1. Dmontrer que X
1
est un PP homogne dintensit
1
=
0
exp
0
r
2
.
2. Dmontrer que lintensit du second ordre de X
1
est
2
(h) =
2
0
k(|h|) o
k(|s u|) = exp
0
V
r
(|s u|) si |s u| r, k(|s u|) = 0 sinon,
o V
r
(z) est la surface de la runion de deux sphres de rayons r distantes
de z.
3. En dduire K, le moment rduit dordre 2 de Ripley de X
1
.
3.7. Processus de Bernoulli latticiel et PPP.
1. Si S
= (Z)
d
est le -squelette d-dimensionnel de R
d
, le processus de
Bernoulli Y () = Y
i
(), i S
de paramtre p est la donne de va-
riables i.i.d. de Bernoulli de paramtre p. Montrer que si p = p
=
d
, le
processus de Bernoulli converge vers un PPP() si 0.
2. Soit X un PPP() homogne sur R
d
, et Y
i
= 1((X [i, i + 1[) ,= ), o
pour i Z
d
, [i, i + 1[ est le cube de ct 1 de base i. Montrer que Y est
un processus de Bernoulli.
3. Soit X un PPP() homogne sur R
2
. On dnit Z = Z
i
, i Z
2
o
Z
i
= N(i +A) pour A =] 1, 1]
2
. Calculer E(Z
i
) et Cov(Z
i
, Z
j
).
3.8. Simulation de PP.
Simuler les processus ponctuels suivants sur S = [0, 1]
2
:
1. Un PPP inhomogne dintensit (x, y) = 1 + 4xy.
2. 20 points dun processus noyau dur pour r = 0.05.
3. Le processus de Neyman-Scott o : (i) les parents x
i
suivent un PPP(20) ;
(ii) les lois du nombre de descendants sont Bin(10, 1/2) ; (iii) les disper-
sions autour des x
i
sont uniformes sur B
2
(x
i
, 0.1) ; de plus il y a indpen-
dance entre toutes ces lois.
4. Un PPM (x
i
, m
i
) o X = (x
i
) est un PPP(20), avec pour marque :
(a) Une boule B
2
(x
i
, r
i
) de rayon r
i
|([0, 0.1]).
(b) Un segment centr en x
i
, de longueur cxp(10) et dorientation uni-
forme.
3.9. Un modle de PP bivari.
Y = (X
1
, X
2
) est un PP bivari [217] t.q. X
1
et X
2
sont deux PPP() indpen-
dants sur S R
2
conditionns au fait que, pour un r > 0 x, d(X
1
, X
2
) r.
1. Montrer que Y a pour densit par rapport au produit de deux PPP(1)
indpendants : f(x
1
, x
2
) = c
n(x1)+n(x2)
1d(x
1
, x
2
) r.
112 3 Processus ponctuels spatiaux
2. Vrier que lintensit conditionnelle de Papangelou de Y pour ajouter
un point
1
x
1
vaut : (
1
, (x
1
, x
2
)) = 1d(
1
, x
2
) r. En dduire
que Y est un processus de Markov pour la relation : (, i) (, j)
i ,= j et | | < r : Y est markovien de porte r.
3. Montrer que X
1
est le PP dinteraction daire : f
1
(x
1
) = c
1
n(x1)
e
a(x1)
.
4. Montrer que X = X
1
X
2
a pour densit g(x) = c
f(x
1
, x
2
) =
c
n(x)
k(x) o
(resp. k(x)) est lensemble (le nombre) des partitions
de x en x
1
x
2
qui respectent un cartement r entre x
1
et x
2
.
5. Soient B(x) =
xx
B(x, r/2) et c(x) le nombre de composantes connexes
de B(x). Vrier que k(x) = 2
c(x)
: X est un PP interaction de connexit
de paramtre = 2.
6. Montrer que ces proprits restent vraies si X
1
et X
2
sont de paramtres
dirents.
4
Simulation des modles spatiaux
La simulation dune loi de probabilit ou dune variable alatoire est un outil
numrique utile chaque fois que lon ne dispose pas dune solution analytique
un problme donn, quil soit combinatoire (nombre de faons de placer
32 dominos sur un damier 88), de recherche de maximum (recontruction
en imagerie baysienne, cf. 2.2.2) ou analytique (calcul dune intgrale). Par
exemple, le calcul de lesprance dune statistique relle g(X) dune v.a. X de
loi ,
(g) =
_
g(x)(dx),
est vite impraticable si X est valeur dans un espace de grande dimension.
La mthode de simulation de Monte Carlo consiste alors estimer (g) par
g
n
=
1
n
n
i=1
g(X
i
)
le long dun n-chantillon X
i
, i = 1, . . . , n de la loi : la loi forte des grands
nombres (LFGN) nous dit en eet que g
n
(g) si n et si g(X) est
intgrable. De plus, si V arg(X) < , le thorme central limite (TCL)
permet de contrler cette convergence qui a lieu la vitesse n
1/2
.
Un autre exemple dutilisation de la mthode de Monte Carlo est lvalua-
tion empirique de la distribution dune statistique (par exemple relle) T(X) :
si on ne connat pas la loi de T (complexit de calculs, pas de rsultat asymp-
totique connu), on estimera sa fonction de rpartition F par sa distibution
empirique le long dun n-chantillon de T(X) :
F
n
(t) =
1
n
n
i=1
1(T(X
i
) t).
En particulier, le quantile t() de T, dni par P(T t()) = sera approch
par T
([n])
o T
(1)
T
(2)
. . . T
(n)
est la statistique dordre des (T
i
=
T(X
i
), i = 1, . . . , n) et [r] est la partie entire du rel r. Cette mthode repose
114 4 Simulation des modles spatiaux
donc sur la simulation dun n-chantillon de X et pour n grand, T
([n])
est une
bonne approximation de t(). On peut ainsi dresser des tables statistiques ou
des bandes de conance approximatives mais asymptotiquement exactes pour
la statistique T.
Si X peut tre simule par une mthode classique (inversion de la fonction
de rpartition, mthode dacceptation-rejet ; cf. [59; 188] et Appendice A), on
dispose alors dune mthode numrique simple permettant un calcul approch
de la quantit recherche.
Cependant, ds est complique, les mthodes classiques sont inop-
rantes. Donnons-en deux illustrations pour un champ spatial :
1. Pour X un modle dIsing sur S = 1, 2, . . . , 10
2
(cf. 2.2.2), la mthode
dinversion de la fonction de rpartition, classiquement utilise pour la
simulation de v.a. ayant un nombre ni dtats (ici = 1, +1
S
est ni)
est inutilisable car est trop grand ( = 2
100
1, 2710
30
) : dune part,
la loi (x) = c
1
exp U(x), c =
y
exp U(y) est incalculable ; dautre
part, la division [0, 1] en sous-intervalles de longueur (x), x ,
ncessaire linversion de la fonction de rpartition, est irralisable.
2. On veut simuler un processus ponctuel X noyau dur (cf. 3.4.2) sur
S = [0, 1]
2
pour un rayon de noyau dur r = 0.1, conditionnellement
une ralisation n = 42 points. Pour cela, on propose la mthode
dacceptation-rejet suivante : on simule n points i.i.d. uniforme sur S et
on retient la conguration si les couples de points sont tous distance
> r. La probabilit quune paire de points soit distance r tant r
2
,
le nombre total moyen de couples distance r de n
2
r
2
; si n nest pas
trop grand, ce nombre suivant approximativement une loi de Poisson [33],
la probabilit quune conguration soit r-noyau dur est approximative-
ment exp n
2
r
2
, soit 1.4810
22
pour le cas qui nous intresse (n = 42).
Cette valeur passe 5, 2 10
13
pour n = 30, 4 10
6
pour n = 20, 4%
pour n = 10. Autant dire que cette mthode rejet est inoprante si n 20.
Pour contourner ces dicults, des algorithmes utilisant une dynamique de
chane de Markov ont t proposs : si une chane (X
n
) converge en loi vers
, X
n
donnera une simulation approche de la loi pour n grand. Une telle
mthode est appele mthode de Monte Carlo par Chane de Markov (MCMC
pour Monte Carlo Markov Chain). Nous prsenterons les deux principaux
algorithmes, savoir lchantillonneur de Gibbs qui est ddi la simulation
dune loi sur un espace produit E
S
et lalgorithme de Metropolis-Hastings
(MH) sur un espace gnral.
Nous commencerons par rappeler les dnitions et proprits de base
dune chane de Markov utiles la construction dun algorithme MCMC
et au contrle de sa convergence. Pour plus de dtails, on pourra consulter
[157; 72; 103; 229].
4.1 Convergence dune chane de Markov 115
4.1 Convergence dune chane de Markov
Soit une loi de probabilit absolument continue par rapport une mesure
de rfrence dnie sur (, c). On notera encore la densit de cette loi.
Pour simuler la loi , on va construire une chane de Markov X = (X
k
, k 0)
sur de transition P telle que la loi de X
n
converge vers . Ainsi, pour k
grand, X
k
fournira une simulation approche de . Commenons par quelques
rappels sur les chanes de Markov.
Soit X = X
n
, n 0 un processus valeur dans (, c) de loi P. On dit
que X est une chane de Markov si, pour tout n 1, tout vnement A c
et toute suite x
0
, x
1
, x
2
, . . . de :
P(X
n+1
A
n+1
[X
n
= x
n
, . . . , X
0
= x
0
)
= P(X
n+1
A[X
n
= x
n
) = P
n
(x
n
, A).
La probabilit conditionnelle P
n
est la transition de la chane au pas n; la
chane est homogne si P
n
P pour tout n, P tant appele la transition de
la chane. En quelque sorte, un processus X est un chane de Markov si sa
mmoire temporelle vaut 1.
Dnitions et exemples
La transition P dune chane de Markov homogne sur (, c) est une appli-
cation P : (, c) [0, 1] telle que :
1. Pour tout A c, P(, A) est mesurable.
2. Pour tout x , P(x, ) est une probabilit sur (, c).
Si X
0
0
, la loi de (X
0
, X
1
, . . . , X
n
) dune chane homogne est caract-
rise par :
P
n
(dx
0
, dx
1
, . . . , dx
n
) = (dx
0
)
n
i=1
P(x
i1
, dx
i
).
Pour k 1, la loi marginale
k
de X
k
vaut
k
(dx
k
) =
_
0
(dx)P
k
(x, dx
k
),
o P
k
(x, ) =
_
k1
k
i=1
P(x
i1
, dx
i
) est la transition en k pas de la chane.
En particulier, la loi de X
1
si X
0
est
(P)(dy) =
_
(dx)P(x, dy). (4.1)
Si = 1, 2, . . . , m est un espace dtat ni, une loi sur est
reprsente par un vecteur ligne de R
m
et la transition P = (P
i,j
) dune chane
de Markov par la matrice mm des probabilits P
i,j
= Pr(X
n+1
= j[X
n
= i) :
lindice de ligne i repre ltat initial, celui de colonne, j, ltat nal. On
116 4 Simulation des modles spatiaux
dit que P est une matrice stochastique au sens o chaque ligne de P est
une distribution de probabilit discrte sur : pour tout i 1, 2, . . . m :
m
j=1
P(i, j) = 1. Avec ces notations, la transition P
k
en k-pas dune chane
homogne discrte nest autre que la puissance P
k
de P. La loi de X
k
vaut
alors P
k
. Ces critures et proprits stendent sans dicult au cas dun
espace = 1, 2, 3, . . . discret dnombrable.
Les processus suivants sont des chanes de Markov :
1. Une marche alatoire relle dnie par la rcurrence : X
n+1
= X
n
+ e
n
,
n 0 o e = (e
n
) est une suite i.i.d. sur R.
2. Un processus AR(1) relatif bruit i.i.d..
3. Si X est un AR(p), la suite des vecteurs X
(p)
n
= (X
n
, X
n+1
, . . . , X
n+p1
)
est une chane de Markov sur R
p
: X est de mmoire p et X
(p)
de m-
moire 1.
4. X
n+1
= (X
n
, U
n
) o : [0, 1] est mesurable et (U
n
) est une
suite i.i.d. de v.a. uniformes sur [0, 1]. Si est un espace discret, toute
chane de Markov peut scrire de cette faon (cf. Appendice A2).
5. Marche alatoire sur un graphe : = 1, 2, . . . , m ni est muni dun
graphe ( symtrique tel que tous les points de S communiquent entre
eux ; notons d
i
> 0 le nombre de voisins de i et i, j) si i et j sont voisins.
La transition suivante dnit une marche alatoire de Markov sur S :
P(i, j) =
1
d
i
si i, j) et P(i, j) = 0 sinon. (4.2)
6. Processus de naissance et de mort : S est ni muni dun graphe ( sym-
trique sans boucle, x = 0, 1
S
est une conguration de 0, 1 sur S
et on considre la dynamique X
n
= x X
n+1
= y suivante : choisir au
hasard uniforme un site s S ;
(a) Si X
n
(s) = 1, maintenir X
n+1
(s) = 1 avec une probabilit > 0 ;
sinon, X
n+1
(s) = 0.
(b) Si X
n
(s) = 0 et si un site voisin vaut 1, on propose X
n+1
(s) = 1 avec
la probabilit > 0 ; sinon X
n+1
(s) = 0.
(c) Enn, si X
n
(s) = 0 et si tous les voisins de i valent 0, on propose
X
n+1
(s) = 1 avec la probabilit > 0 ; sinon X
n+1
(s) = 0.
Irrductibilit, apriodicit et P-invariance
Soit une loi sur (, c) ; la convergence dune chane de Markov est lie aux
trois notions suivantes :
1. P est dite -irrductible si, pour tout x et tout A c tel que
(A) > 0, il existe k = k(x, A) t.q. P
(k)
(x, A) > 0.
2. est P-invariante si P = o P est dnie en (4.1).
4.1 Convergence dune chane de Markov 117
3. P est priodique sil existe d 2 et une partition
1
,
2
, . . . ,
d
de
telle que pour tout i = 1, . . . , d, P(X
1
i+1
[X
0
i
) = 1, avec la
convention d + 1 1. Sinon, on dit que la chane est apriodique.
La -irrductibilit traduit le fait que tout vnment de -probabilit > 0
peut tre atteint de nimporte quel tat initial en un nombre ni de pas avec
une probabilit > 0. Si est ni, on dit que la (matrice de) transition P
est primitive sil existe un entier k > 0 t.q., pour tout i, j, P
k
(i, j) > 0 : on
passe de tout tat i tout tat j en k pas. Si est ni, lirrductibilit est
implique par le fait que P soit primitive.
Si est discret, ni ou dnombrable, et si est positive (not > 0 :
i , (i) > 0), la -irrductibilit est identique la communication entre
tous les tats, i communiquant avec j sil existe k(i, j) > 0 t.q. P
k(i,j)
(i, j) > 0.
La d-priodicit dit que la chane de transition P
d
vit sparment sur d
sous-espaces disjoints dtats
l
, l = 1, . . . , d. Une condition susante as-
surant lapriodicit de la chane est que la (densit de) transition vrie
P(x, x) > 0 sur un ensemble de x de -mesure > 0.
La marche alatoire (4.2) est irrductible. Il en est de mme du processus de
naissance et de mort [6] condition que , et ]0, 1[. La marche alatoire
est apriodique si ( admet au moins une boucle mais ne lest plus si m = 2
sites et si le graphe est sans boucle.
Loi stationnaire dune chane de Markov
Si est une loi P-invariante, est une loi stationnaire de X puisque si X
0
,
X
k
pour tout k. Dans ce cas, le processus X = (X
k
) est stationnaire.
Convergence dune chane de Markov
Il est facile de vrier que si (X
k
) est une chane de Markov de transition P
telle que :
pour tout x et A c : P
n
(x, A) (A) si n ,
alors est P-invariante, P est -irrductible et apriodique. La proprit
remarquable la base de la construction des algorithmes MCMC est la rci-
proque. Avant dnoncer cette proprit, dnissons la distance en variation
totale (VT) entre deux probabilits
1
et
2
sur (, c) :
|
1
2
|
V T
= sup
AL
[
1
(A)
2
(A)[ .
Si une suite
n
pour la norme en VT, alors
n
en loi. Si est
discret, la norme en VT nest autre que la demi norme l
1
:
|
1
2
|
V T
=
1
2
|
1
2
|
1
=
1
2
i
[
1
(i)
2
(i)[ .
118 4 Simulation des modles spatiaux
Thorme 4.1. Convergence dune chane de Markov (Tierney [214])
1. Soit P une transition apriodique, -irrductible et -invariante. Alors,
-p.s. en x ,
_
_
P
k
(x, )
_
_
V T
0 si k .
2. Si de plus, pour tout x , P(x, ) est absolument continue par rapport
(P(x, ) ), la convergence a lieu pour tout x .
Sous les conditions (12), on a, pour toute loi initiale ,
_
_
P
k
_
_
V T
0.
Si est ni, on a plus prcisment [129] :
Thorme 4.2. Convergence dune chane sur un espace dtat ni
Soit P une transition sur ni. On a les quivalences :
1. Pour tout , P
k
et > 0 est lunique loi invariante de P.
2. P est irrductible et apriodique.
3. P est primitive.
De plus, si pour un k > 0, = inf
i,j
P
k
(i, j) > 0, si m = et si [x] est la
partie entire de x, on a :
|P
n
|
V T
(1 m)
[n/k]
. (4.3)
Pour construire un algorithme MCMC de simulation de , il faudra donc
proposer une transition P facile simuler, -irrductible et apriodique et
telle que soit P-invariante. La -irrductibilit et lapriodicit doivent tre
vries au cas par cas. Rechercher P telle que soit P-invariante nest pas
simple en gnral : si par exemple est ni, cette question est lie la
recherche dun vecteur propre gauche de P associ la valeur propre 1,
recherche dicile si est de grande taille.
Une faon simple dassurer la P-invariance de est de proposer une tran-
sition P qui soit -rversible.
Dnition 4.1. Chane -rversible
P est -rversible si
A, B c :
_
A
P(x, B)(dx) =
_
B
P(x, A)(dx).
Si et P sont des lois densit, la -rversibilit de P scrit :
x, y : (x)p(x, y) = (y)p(y, x).
Si la transition P dune chane X est -rversible, alors les lois de couples
(X
n
, X
n+1
) et (X
n+1
, X
n
) sont identiques si X
n
: la loi de la chane est
inchange par retournement du temps. Dautre part :
4.1 Convergence dune chane de Markov 119
Proposition 4.1. Si P est -rversible, alors est P-invariante
Preuve. La -rversibilit de P donne directement :
(P)(A) =
_
(dx)P(x, A) =
_
A
(dx)P(x, ) = (A).
.
Exemple 4.1. Simulation dun modle noyau dur sur un rseau discret
Soit S = 1, 2, . . . , m un ensemble ni de sites muni dun graphe de
voisinage symtrique ( sans boucle. Une conguration noyau dur sur (S, ()
est une conguration de x
i
0, 1 en chaque site i S (x
i
= 1 si i est
occup, x
i
= 0 si i est vacant) telle que deux sites voisins de S ne peuvent
simultanment tre occups. Lespace des congurations possibles est donc :
0
= x 0, 1
S
t.q. x
i
x
j
= 0 si i et j voisins.
Les modles noyau dur sont utiliss en physique et en dimension 3 pour
analyser le comportement dun gaz sur rseau lorsque des particules de rayon
non-ngligeable ne peuvent pas se recouvrir. Si est la loi uniforme sur
0
,
on peut par exemple sintresser au nombre moyen de sites occups dune
conguration noyau dur ou un intervalle de conance sur ce nombre ;
0
tant de grand cardinal, la simulation de cette loi uniforme est ralise par
lalgorithme suivant (Hggstrm [103]) :
1. On choisit au hasard uniforme un site i de S.
2. On jette une pice non-pipe.
3. Si on observe Pile et si les sites voisins de i sont
vacants, alors x
i
(n + 1) = 1 ; sinon x
i
(n + 1) = 0.
4. Si j ,= i, x
n+1
(j) = x
n
(j). On retourne en 1.
Montrons que P est -rversible : tant uniforme, la rversibilit de P
quivaut la symtrie de P : P(x, y) = P(x, y) si x ,= y. Soit i le site o a lieu
le changement x
i
,= y
i
(ailleurs, rien ne change). Deux cas sont possibles : (i)
x
i
= 1 y
i
= 0 a lieu avec la probabilit 1/2 puisque seule lobservation dun
tirage Face peut conduire cette ralisation (si on avait tir Pile, les voisins
de i tant tous inocups, on devrait passer y
i
= 1) ; (ii) x
i
= 0 y
i
= 1
ne peut tre ralis que si on tire Pile et si les sites voisins de i sont tous
inocups ; cette transition a donc aussi lieu avec la probabilit 1/2. P est donc
symtrique, est P-rversible donc invariante pour P.
Dautre part, P est irrductible : soient x, y
0
; montrons quon peut
passer de tout x tout y de
0
en un nombre ni de pas ; ceci est par exemple
ralisable en passant de x 0 (la conguration avec des 0 partout) en eaant
un un les points o x vaut 1, puis de 0 y en faisant natre un un les
points o y vaut 1. Si n(z) est le nombre de sites occups par z, le passage de
x 0 est possible en n(x) pas, chacun avec une probabilit 1/2m, celui de
0 y en n(y) pas, chacun avec la probabilit (1/2m) on obtient donc,
120 4 Simulation des modles spatiaux
P
n(x)+n(y)
(x, y) (1/2m)
n(x)+n(y)
> 0, x, y
0
.
Pour vrier lapriodicit, il sut de constater que pour toute congura-
tion x, P(x, x) 1/2. La chane de Markov de transition P ralisera donc la
simulation approche de la loi .
Pour valuer le nombre moyen M
0
de points dune conguration noyau
dur, on droulera une ralisation X
0
, X
1
, X
2
, . . . , X
M
de la chane de transition
P (avec par exemple ltat initial X
0
= 0) : notant n(X) le nombre de points
dune ralisation X, un estimateur de M
0
est,
M
0
= M
1
M
k=1
n(X
k
). Si
cest la variabilit de cette distribution autour de M
0
qui nous intresse, on
lestimera par
2
= M
1
M
k=1
n(X
k
)
2
(
M
0
)
2
.
4.1.1 Loi des grands nombres et TCL pour une chane homogne
Le contrle de la vitesse de convergence g
n
= n
1
n
i=1
g(X
i
) (g) utilise
la notion suivante dergodicit gomtrique [157; 71; 188] ;
< 1, M L
1
() t.q. x k 1 : |P
k
(x, ) ()|
V T
M(x)
k
.
Thorme 4.3. LFGN et TCL pour une chane de Markov
1. LFGN : si X est -irrductible de loi invariante et si g L
1
(), alors,
-p.s. :
g
n
=
1
n
n1
k=0
g(X
k
) g =
_
g(x)(dx).
Posons alors, quand cette quantit existe, les covariances tant prises pour
la chane stationnaire :
2
(g) = V ar(g(X
0
)) + 2
k=1
Cov(g(X
0
), g(X
k
)).
2. TCL : si P est gomtriquement ergodique, alors
2
(g) existe. Si de plus
2
(g) > 0, on a,
n(g
n
g)
loi
^(0,
2
(g))
sous lune ou lautre des conditions suivantes : (i) g L
2+
() pour un
> 0 ; (ii) P est -rversible et g L
2
().
4.2 Deux algorithmes markoviens de simulation
Soit une loi de densit (x) par rapport la mesure sur (, c). Si est
discret, on prendra pour la mesure de comptage. Quitte rduire lespace
dtat, on supposera vrie la condition de positivit : pour tout x ,
(x) > 0. Pour simuler , on va construire une chane -irrductible et ap-
riodique de transition P telle que soit P-invariante.
Lchantillonneur de Gibbs nest utilisable que sur un espace produit : =
E
S
. Lalgorithme de Metropolis est valable sur un espace dtat gnral.
4.2 Deux algorithmes markoviens de simulation 121
4.2.1 Echantillonneur de Gibbs sur un espace produit
Soit X = (X
i
, i S) une variable sur S = 1, 2, . . . , n de loi sur
=
iS
E
i
. Pour tout x = (x
1
, x
2
, . . . , x
n
) , on suppose que les lois
conditionnelles
i
([x
i
), o x
i
= (x
j
, j ,= i), sont facilement simulables. Consi-
drons les transitions
P
i
(x, y) =
i
(y
i
[x
i
)1(x
i
= y
i
), (4.4)
qui nautorisent de changement quen un seul site i, savoir x
i
y
i
, ceci avec
la probabilit
i
(y
i
[x
i
), x tant inchange ailleurs (x
i
= y
i
). On va tudier
deux chantillonneurs.
Echantillonneur de Gibbs avec balayage squentiel
Supposons que lon visite S squentiellement, par exemple dans lordre 1
2 . . . (n1) n : une telle suite de visites de tous les sites de S sappelle
un balayage de S. A chaque pas, la valeur x
i
en i va tre relaxe, c--d tire
au hasard, suivant la loi
i
conditionnelle ltat courant. La (densit de)
transition de ltat x = (x
1
, x
2
, . . . , x
n
) ltat y = (y
1
, y
2
, . . . , y
n
) aprs un
balayage de S est donc donne par :
P
S
(x, y) =
n
i=1
i
(y
i
[y
1
, . . . , y
i1
, x
i+1
, x
i+2
, . . . , x
n
).
Au i-me pas du balayage,
i
est conditionne par les (i 1) valeurs y dj
relaxes et par les (n i) valeurs de x qui nont pas encore t relaxes.
Echantillonneur par balayage alatoire
Soit p = (p
1
, p
2
, . . . , p
n
) une probabilit > 0 sur S ( pour tout i, p
i
> 0). A
chaque pas, un site i est choisi au hasard suivant la loi p et la valeur en ce
site est relaxe suivant la loi
i
conditionnelle ltat courant. La transition
pour un changement vaut alors,
P
A
(x, y) =
n
i=1
p
i
i
(y
i
[x
i
)1(x
i
= y
i
).
Thorme 4.4. Convergence de lchantillonneur de Gibbs
Supposons que, pour tout x , (x) > 0. Alors les transitions P
S
de lchantillonneur squentiel et P
A
de lchantillonneur alatoire sont -
irrductibles, apriodiques et de loi invariante . De plus, pour toute loi ini-
tiale , P
k
.
Preuve. Echantillonneur squentiel P
S
. La positivit de implique celle des
densits conditionnelles :
i
(x
i
[x
i
) > 0, x = (x
i
, x
i
).
122 4 Simulation des modles spatiaux
On en dduit que, pour tout x, y, P
S
(x, y) > 0 : P
S
est -irrductible et aprio-
dique. Vrions que est P
S
-invariante. P
S
tant la compose des transitions
P
i
(4.4), il sut de vrier que chaque P
i
est -invariante. Or chaque P
i
est
-rversible puisquen eet,
(x)P
i
(x, y) = (x
i
, x
i
)
i
(y
i
[x
i
)1(x
i
= y
i
)
=
(x
i
, x
i
)
i
(y
i
, x
i
)
i
(x
i
)
1(x
i
= y
i
)
= (y)P
i
(y, x)
est symtrique en (x, y) : est donc P
S
-invariante. P
S
(x, ) tant absolument
continue par rapport , on en dduit que pour toute loi initiale , P
k
.
Si est ni, = inf
i,x
i
(x
i
[x
i
) > 0 et = inf
x,y
P(x, y)
n
> 0.
Daprs (4.3), on a le contrle :
,
_
_
P
k
_
_
V T
(1 m)
k
, m = .
Echantillonneur alatoire P
A
. Il faut enchaner n transitions P
A
pour pou-
voir obtenir la -irrductibilit et lapriodicit de P
A
: si par exemple on
slectionne dabord le site 1, puis 2 et enn n, on obtient la minoration
x, y : P
n
A
(x, y) p
1
p
2
. . . p
n
P
S
(x, y) > 0.
P
A
est -rversible puisque,
(x)P
A
(x, y) =
n
i=1
p
i
(x
i
, x
i
)
i
(y
i
[x
i
)1(x
i
= y
i
)
=
n
i=1
p
i
(x
i
, x
i
)
i
(y
i
, x
i
)
i
(x
i
)
1(x
i
= y
i
)
= (y)P
A
(y, x).
est donc P
A
-invariante et labsolue continuit de P
A
(x, ) en assure la
convergence de lchantillonneur alatoire. Si est ni, = inf
x,y
P
n
(x, y)
2
. . .
n
n
> 0 et
_
_
P
k
_
_
2(1 m)
[k/n]
.
.
Pour construire P, il sut de connatre un facteur multiplicatif prs :
en eet, si (x) = c e(x), les lois conditionnelles
i
ne dpendent pas de c.
Cette remarque est importante car le plus souvent (par exemple pour les
champs de Gibbs), nest connue qu un facteur multiplicatif prs.
Dautres choix de balayages de S, avec ventuelles rptitions des visites,
priodicit ou non des balayages, relaxation sur des parties de S autres que
les singletons, assurent encore la convergence P
n
. La seule condition
requise pour la convergence de lchantillonneur est que la suite des balayages
visite inniment chaque site de S [81].
4.2 Deux algorithmes markoviens de simulation 123
4.2.2 Lalgorithme de Metropolis-Hastings (MH)
Propos par Metropolis en 1953, lalgorithme a pris sa forme gnrale en 1970
avec Hastings [110] et Robert et Cassella [188], la proprit doptimalit en
variance de lalgorithme de Metropolis dans la famille des algorithmes de MH
ayant t tablie par Peskun ([172] et cf. 4.2.2). Une dirence importante
avec lchantillonneur de Gibbs est quici lespace dtat nest pas suppos
tre un produit.
Description de lalgorithme de MH
Lide de base de lalgorithme de MH est de construire une transition P qui
est -rversible ; P sera donc -invariante. Ceci se fait en 2 tapes :
1. Transition de proposition de changement : on commence par proposer un
changement x y selon une transition Q(x, ).
2. Probabilit dacceptation du changement : ensuite, on accepte ce change-
ment avec la probabilit a(x, y) o a : ]0, 1].
Les deux paramtres de lalgorithme sont Q, la transition de proposition
de changement et a la probabilit daccepter ce changement. Notant q(x, y)
la densit de Q(x, ), la transition P de MH scrit :
P(x, y) = a(x, y)q(x, y) +1(x = y)
_
1
_
a(x, z)q(x, z)dz
_
. (4.5)
Le choix (Q, a) assurera la -rversibilit de P si lquation dquilibre sui-
vante (detailed balance equation) est satisfaite :
x, y : (x)q(x, y)a(x, y) = (y)q(y, x)a(y, x). (4.6)
Imposer la rversibilit implique que q satisfait la condition de symtrie
faible : q(x, y) > 0 q(y, x) > 0 : Q doit tre telle que si elle autorise le
changement x y, elle doit aussi autoriser le changement y x. Pour un tel
couple (x, y), dnissons le ratio de MH par,
r(x, y) =
(y)q(y, x)
(x)q(x, y)
.
Si q est symtrique, r(x, y) = (y)/(x).
Pour que lagorithme P ralise la simulation de , reste vrier que P est
irrductible et apriodique. Pour que P soit irrductible, Q doit ltre, mais
ce nest pas susant : lirrductibilit comme lapriodicit de P devront tre
examines au cas par cas. Si est ni, lapriodicit est assure sous lune
des conditions suivantes :
1. Il existe x
0
t.q. Q(x
0
, x
0
) > 0 (pour au moins un tat, on sautorise de ne
rien changer).
124 4 Simulation des modles spatiaux
2. Il existe (x
0
, y
0
) t.q. r(x
0
, y
0
) < 1 : pour lalgorithme de Metropolis (4.8),
ceci signie quon peut refuser un changement.
3. Q est symtrique et nest pas la loi uniforme.
Pour (1) et (2), il sut de vrier que P(x
0
, x
0
) > 0. Examinons (3) : Q
tant irrductible, tous les tats communiquent entre eux pour la relation :
x y q(x, y) > 0 ; ntant pas uniforme et tous les tats communiquant
entre eux, il existe x
0
y
0
t.q. (x
0
) > (y
0
) ; lapriodicit rsulte alors de
la minoration :
P(x
0
, x
0
) Q(x
0
, y
0
)
_
1
(y
0
)
(x
0
)
_
> 0.
Comme pour lchantillonneur de Gibbs, il sut de connatre un fac-
teur multiplicatif prs pour construire la transition P de MH.
La condition dquilibre (4.6) assurant la -rversibilit de P est satisfaite
si la probabilit dacceptation de changement a scrit a(x, y) = F(r(x, y))
pour une fonction F : ]0, []0, 1] vriant :
> 0 : F() = F(
1
). (4.7)
En eet, sous cette condition,
a(x, y) = F(r(x, y)) = r(x, y)F(r(x, y)
1
) = r(x, y)a(y, x).
Deux dynamiques classiques satisfont (4.7) : la dynamique de Barker [19]
et la dynamique de Metropolis. La dynamique de Barker est associe la
fonction F() =
1+
: si q est symtrique,
F(r(x, y)) = F
_
(y)
(x)
_
=
(y)
(x) +(y)
;
on accepte la proposition de changement x y si y est plus probable que x.
Lalgorithme de Metropolis
La dynamique de Metropolis correspond au choix F() = min1, . Dans ce
cas,
a(x, y) = min
_
1,
(y)q(y, x)
(x)q(x, y)
_
(4.8)
et
a(x, y) = min
_
1,
(y)
(x)
_
si q est symtrique.
Dans ce cas, lalgorithme de Metropolis scrit :
1. Soit x ltat initial, Choisir y suivant Q(x, .).
2. Si (y) (x), garder y. Revenir en 1.
4.2 Deux algorithmes markoviens de simulation 125
3. Si (y) < (x), tirer une loi uniforme | sur [0, 1].
(a) si | p = (y)/(x), garder y.
(b) si |> p, garder la valeur initiale x.
4. revenir en 1.
Lchantillonneur de Gibbs est un cas particulier dalgorithme de Metro-
polis, celui o le changement propos consiste tirer un site i au hasard puis
relaxer x
i
en y
i
suivant la densit q
i
(x, y
i
) et enn accepter y
i
avec la
probabilit
a
i
(x, y) = min
_
1,
(y)q
i
(y, x
i
)
(x)q
i
(x, y
i
)
_
.
Les choix q
i
(x, y
i
) =
i
(y
i
[x
i
) conduisent a(x, y) 1 et redonnent alors
lchantillonneur de Gibbs.
Exemple 4.2. Un problme de coupe maximale densemble
Soit S = 1, 2, . . . , n un ensemble de sites, w = w
i,j
, i, j S une famille
de poids rels symtriques sur S S, = T(S) lensemble des parties de S,
et U : R dnie par :
U(A) =
iA,j / A
w
i,j
si A ,= S et A ,= , U(A) = + sinon.
Considrons le problme combinatoire suivant : Dterminer le sous-ensemble
min
des parties A qui ralisent le minimum de U,
min
= A : U(A) = minU(B) : B S.
Ce problme ne peut tre rsolu en numrant les valeurs de U car le cardinal
de est trop grand. Une faon dtourne de rpondre cette question est la
suivante : simuler une variable dont la distribution
sur est :
(A) = c() expU(A) (4.9)
En eet, si > 0 est trs petit, le mode de
sera ralis aux congurations
A
min
. Ainsi, simuler
pour petit est une faon dapprocher
min
.
Signalons que cet algorithme mime lun des bons algorithmes pour rsoudre ce
problme doptimisation, savoir lalgorithme de recuit simul (RS ; Simulated
Annealing) : les simulations du RS se font pour une suite de paramtres
n
0
+
, la convergence de
n
vers 0 devant tre lente pour assurer la convergence
de X
n
vers la
0
uniforme sur
min
[82; 106; 1; 10; 40].
Pour simuler
, on propose lalgorithme de Metropolis suivant :
1. Les uniques changements A B autoriss sont : (i) B = A
s si A ,= S et s / A; (ii) B = As si A ,= et s A.
126 4 Simulation des modles spatiaux
2. La transition Q de proposition de changement se fait
alors en choisissant s uniformment sur S : Q(A, B) = 1/n pour
(i) et (ii) ; sinon, Q(A, B) = 0.
3. On value
U = U(B) U(A) =
j / B
w
s,j
iA
w
i,s
si (i)
U =
iB
w
i,s
j / A
w
s,j
si (ii).
4. Si U 0, on garde B.
5. U > 0, on tire U une loi uniforme sur [0, 1] ;
si U expU, on garde B ; sinon on reste en A.
6. on retourne en 1.
Q est symtrique et P est irrductible : en eet, si E et F sont deux parties
de S respectivement n(E) et n(F) points, un chemin de E F consiste
eaer un un les points de E pour arriver lensemble vide , puis faire
natre un un les points de F ; ce chemin n
E
+ n
F
pas est ralisable avec
une probabilit P
n(E)+n(F)
(E, F) > 0.
La transition est apriodique si U nest pas constante : en eet, dans ce
cas, il existe deux congurations A et B qui sont Q-voisines telles que U(A) <
U(B). La proposition de changement A B est refuse avec la probabilit
p = [1 expU] > 0 : P(A, A) = p/n > 0 et P est apriodique. Cet
algorithme de Metropolis ralise donc la simulation approche de
.
Optimalit en variance de lalgorithme de Metropolis
Si est un espace dtat ni et si H est une transition dnissant une chane
(X
0
, X
1
, . . .) convergeant vers , la limite,
v(f, H) = lim
n
1
n
V ar
n
i=1
f(X
i
)
existe et est indpendante de la loi initiale de la chane [128]. Loptimalit du
noyau de Metropolis P
M
dans la famille de tous les noyaux de MH traduit le
fait que, pour tout f et tout noyau P
MH
de MH, on a [172] :
v(f, P
M
) v(f, P
MH
). (4.10)
Une explication heuristique de cette proprit est que le noyau de Metropolis
favorise davantage le changement dtat que les autres noyaux de MH (P
M
est plus mlangeant que P
MH
). Ce rsultat doptimalit reste vrai pour un
espace dtat gnral [215].
4.3 Simulation dun champ de Markov sur un rseau
4.3.1 Les deux algorithmes de base
Soit X un champ de Markov sur S = 1, 2, . . . , n, tats dans =
iS
E
i
(par exemple = E
S
) et de densit :
4.3 Simulation dun champ de Markov sur un rseau 127
(x) = Z
1
expU(x), U(x) =
Ac
A
(x) (4.11)
o ( est la famille des cliques du graphe de Markov (cf. Ch. 2, Dnition 2.2)
et = (
A
, A () le potentiel de Gibbs de X. On peut simuler de deux
faons :
1. Soit en utilisant lchantillonneur de Gibbs pour les lois conditionnelles :
i
(x
i
[x
i
) = Z
1
i
(x
i
) expU
i
(x
i
[x
i
)
o U
i
(x
i
[x
i
) =
A:Ai
A
(x) et Z
i
(x
i
) =
uiEi
exp U
i
(u
i
[x
i
). Les-
pace E
i
nayant pas la complexit dun espace produit, il est susant
de connatre les nergies conditionnelles U
i
(x
i
[x
i
) pour simuler la loi X
i
conditionnelle x
i
.
2. Soit en utilisant une dynamique de Metropolis : si la transition de pro-
position Q admet une densit q et si q est symtrique, alors, notant
a
+
= maxa, 0, la transition de Metropolis admet une densit p qui
vaut, si x ,= y :
p(x, y) = q(x, y) exp U(x) U(y)
+
.
Pour la dynamique de Metropolis, le changement peut se faire site par site
ou non.
Il existe dautres algorithmes MCMC : lexercice 4.11 tudie lensemble des
transitions MCMC ralisant la simulation de X lorsque la relaxation en un pas
se fait site par site ; lchantillonneur de Gibbs et lalgorithme de Metropolis
sont deux cas particuliers de telles transitions.
4.3.2 Exemples
Modle dIsing isotropique aux 4-ppv
Si S = 1, 2, . . . , n
2
et E = 1, +1, la loi jointe et les lois conditionnelles
valent respectivement, si v
i
=
ji
x
j
est la contribution des 4-ppv de i,
(x) = Z
1
exp
i
x
i
+
<i,j>
x
i
x
j
, (4.12)
i
(x
i
[x
i
) =
exp x
i
( +v
i
)
2ch( +v
i
)
. (4.13)
Dynamique de Metropolis par change de spins
La proposition Q de changement x y est la suivante : on choisit au hasard
deux sites i ,= j, on permute les spins en i et j et on ne change rien ailleurs :
y
i
= x
j
, y
j
= x
i
et y
i,j]
= x
i,j]
. La transition de proposition vaut alors :
128 4 Simulation des modles spatiaux
Q(x, y) =
_
2
n
2
(n
2
1)
pour un tel change,
0 sinon
.
Il faut remarquer que si x(0) est la conguration initiale, lalgorithme volue
dans le sous-espace
x(0)
1, +1
S
des congurations ayant le mme
nombre de spins +1 (et donc de spins 1) que x(0). La simulation ralise
sera donc celle de restreinte ce sous espace
x(0)
.
Il faut calculer laccroissement U(x, y) = U(y) U(x) pour identier la
transition de Metropolis. Ce calcul est local si X est markovien : par exemple,
pour le modle dIsing isotropique aux 4-ppv (4.12), on trouve :
U(x, y) =
_
(x
j
x
i
)(v
i
v
j
) si |i j|
1
> 1,
(x
j
x
i
)(v
i
v
j
) (x
j
x
i
)
2
sinon.
Un pas de lalgorithme de Metropolis par change de spins est donc :
1. On tire deux lois uniformes indpendantes sur 1, 2, . . . , n
2
slectionnant ainsi deux sites i et j.
2. On opre le changement x y par permutation de x
i
avec x
j
.
3. On calcule U(x, y) : si U(x, y) > 0, on accepte y.
4. Sinon, on tire U |([0, 1]), indpendamment du 1 :
(a) Si U < expU(x, y), on retient y.
(b) Si U exp U(x, y), on reste en x.
Q est irrductible sur
0
puisque deux congurations de
0
se correspondent
par une permutation et que toute permutation est un produit ni de trans-
positions. La transition de Metropolis P est irrductible puisqu chaque pas
lmentaire, on accepte le changement avec une probabilit > 0.
Si ,= 0, U nest pas constante ; si de plus x(0) nest pas constante, il
existe deux congurations x et y qui sont Q-voisines et telles que U(y) >
U(x) ; ainsi le changement x y est refus avec la probabilit P(x, x)
21expU(x, y)/n
2
(n
2
1) > 0 : la chane est apriodique et lalgorithme
ralise la simulation de restreinte
0
.
Simulation des auto-modles markoviens
Pour un auto-modle (cf. 2.4), le produit des lois conditionnelles
i
tant
absolument continu par rapport , lchantillonneur de Gibbs converge vers
pour toute loi initiale. La Fig. 4.1 montre cette volution pour deux textures
binaires auto-logistiques .
Simulation dun vecteur gaussien
Examinons lchantillonneur de Gibbs dun vecteur gaussien X ^
n
(m, ),
inversible ; posant Q =
1
, la transition associe au balayage 1
2 . . . n est le produit des i-imes relaxations conditionnelles z
i
=
(y
1
, . . . , y
i1
, x
i+1
, . . . , x
n
), i = 1, . . . , n, suivant la loi
4.3 Simulation dun champ de Markov sur un rseau 129
(1-a) (1-b) (1-c)
(2-a) (2-b) (2-c)
Fig. 4.1. Simulation par chantillonneur de Gibbs de deux textures binaires auto-
logistiques sur le rseau {1, 2, . . . , 100}
2
. La conguration initiale est 1 sur la moiti
gauche, 0 sur la moiti droite. Simulations : (a) aprs un balayage, (b) aprs 10
balayages, (c) aprs 1000 balayages. On a considr : (1) le modle isotropique aux
4-ppv avec = 3, = 1.5 ; (2) le modle aux 8-ppv avec = 2, 0,1 = 1.2,
1,0 = 1.2, 1,1 = 0.8 et 1,1 = 1.4. Les congurations 0 et 1 sont quiprobables
pour chacun des deux modles.
i
(x
i
[z
i
) ^
1
(q
1
ii
j:j,=i
q
ij
z
j
, q
1
ii
) .
Si le champ est markovien,
i
(x
i
[x
i
) =
i
(x
i
[x
i
).
La comparaison de cette simulation avec la mthode standard utilisant la
dcompostion de Cholesky = T
t
T de ne conduit pas une conclusion d-
nitive quant lavantage dune mthode par rapport lautre. Par exemple,
pour S = 1, 2, . . . , 100
2
est une matrice de dimension 10
4
10
4
:
1. Via la dcomposition de Cholesky : si est un 10
4
-chantillon gaussien
rduit, X = T ^
10
4 (0, ). Le calcul de T est coteux mais il nest
pas rpter pour obtenir une autre ralisation de X ; dautre part, la
simulation ralise est exacte.
2. Via lchantillonneur de Gibbs : la mthode exige un nombre N important
de balayages an que (lon juge que) lalgorithme entre dans son rgime
stationnaire [cf. 4.5.1 et 89]. Si par exemple N = 100 balayages susent,
100 10
4
simulations gaussiennes sont ncessaires pour simuler une rali-
sation de X. Il est inutile de connatre la forme de Cholesky de , donc de
diagonaliser . En revanche, il faudra recommencer les 100 10
4
simula-
tions pour obtenir une autre ralisation de X. Dautre part, la simulation
obtenue est approche.
130 4 Simulation des modles spatiaux
Espace dtat produit
Lchantillonneur de Gibbs est bien adapt pour simuler des modles espace
dtats produit, E = R
n
. Ce type despace se rencontre dans de nombreuses
applications : par exemple en tldtection spatiale, = 1, 2, . . . , r est
un label qualitatif de texture (terre cultive, fort, eau, zone aride, etc) et
x R
n
une rponse multispectrale quantitative attache chaque site. Des
exemples de tels modles sont dcrits lexercice 2.6.
4.3.3 Simulation sous contrainte
Pour (x) = c exp U(x) une loi sur dnergie U connue, on veut simuler
C
, la loi restreinte au sous-ensemble
C
= x : C(x) = 0 dni
par une contrainte C : R
+
,
C
(x) = 1
C
(x)Z
1
C
exp U(x).
Un exemple dune telle simulation li la reconstruction sous contrainte dun
systme de failles gologiques est prsent lexercice 4.13.
Prsentons brivement deux rsultats, lun relatif lchantillonneur de
Gibbs sur = E
n
, lautre la dynamique de Metropolis. Ici, comme pour
lalgorithme de recuit simul, les dynamiques de Markov utilises sont in-
homognes, les transitions (P
k
, k 0) tant variables dans le temps. Leurs
convergences dcoulent dun critre dergodicit pour une chane inhomogne
(cf. Isaacson et Madsen [120]).
Lalgorithme est le suivant : soit (
k
) une suite relle positive, (
k
) la suite
des lois dnergies U
k
pnalises de U au taux
k
C,
U
k
(x) = U(x)
k
C(x),
et
k
la loi dnergie U
k
. Si
k
+, les congurations x qui ne ralisent
pas C(x) = 0 seront progressivement limines et il est facile de voir que
k
(x)
C
(x) pour tout x . On a les rsultats :
1. Dynamique de Gibbs inhomogne [81] : soit P
k
la transition de Gibbs
associe
k
pour le k-ime balayage de S. Si
k
=
0
log k avec
0
assez
petit, la chane inhomogne (P
k
) converge vers
C
.
2. Dynamique de Metropolis inhomogne [228] : soit Q une transition de
proposition de changement homogne dans le temps, irrductible et sy-
mtrique. Soit P
k
le noyau de Metropolis dnergie U
k
,
P
k
(x, y) = q(x, y) exp U
k
(x) U
k
(y)
+
, si y ,= x.
Alors, si
k
=
0
log k et si
0
est assez petit, la chane inhomogne (P
k
)
converge vers
C
.
Les conditions requises de convergence lente
k
sont les analogues
(avec
k
= T
1
k
) la condition de convergence lente T
k
0 pour la suite des
tempratures T
k
dans lalgorithme de recuit simul ; ces conditions assurent
lergodicit de la chane inhomogne (P
k
) [120; 82; 1].
4.3 Simulation dun champ de Markov sur un rseau 131
4.3.4 Simulation dune dynamique de champ de Markov
Supposons quune dynamique X = X(t), t = 1, 2, . . . dun champ de Markov
X(t) = (X
i
(t), i S), S = 1, 2, . . . , n, soit caractrise de la faon suivante
(cf. 2.5) ; on se donne :
1. La loi initiale de X(0), dnergie U
0
.
2. Les transitions temporelles P
t
(x, y) de x = x(t 1) y = x(t) dnergie
U
t
(x, y).
La simulation peut se faire rcursivement par chantillonnages de Gibbs suc-
cessifs : on simule X(0), puis X(t), t 1 conditionnellement x(t 1), ceci
pour t = 1, 2, . . . . Pour un champ qui est conditionnellement markovien, les
lois conditionnelles au site espace-temps (i, t) sexplicitent facilement par-
tir des nergies conditionnelles U
t,i
([x, y
i
) : par exemple, pour la dynamique
auto-logistique (2.18) de potentiels :
i
(x, y) = y
i
i
+
ji
ij
x
j
(t 1) et
ij
(x, y) =
ij
y
i
y
j
si i S et j i,
U
t,i
(y
it
[x, y
i
) = y
it
i
+
ji
ij
x
j
(t 1) +
ji
ij
y
j
.
Lutilisation de lchantillonneur de Gibbs est aise chaque fois que le
modle est markovien dans le temps et dans lespace, permettant de simuler
des volutions markoviennes homognes ou non dans le temps : modle de
croissance de taches ou modle de feu ou de diusion spatiale, systme de
particules [74; 73].
Exemple 4.3. Simulation dun modle de croissance de tche
Considrons le modle suivant de croissance de tache sur Z
2
: le champ
X(t) = (X
s
(t), s Z
2
) est tats dans 0, 1
Z
2
, 0 reprsentant ltat sain,
1 ltat malade. Supposons que X soit sans gurison, c--d que si X
s
(t) = 1,
alors X
s
(t
t
) = 1 pour t
t
> t. Identiant ltat x avec le sous-ensemble de
Z
2
o la conguration vaut 1, un exemple de modle est spci par son
tat initial (par exemple X(0) = 0) et une transition spatio-temporelle
X(t) = x y = X(t + 1) aux ppv nautorisant que les y x x, transition
dnergie :
U(x, y) =
ix
y
i
+
ix,jx t.q. i,j)
x
j
y
i
.
Lchantillonneur de Gibbs conditionnel x balaye alors lensemble des sites
de x avec des lois de relaxation au site i x dnergies conditionnelles,
U
i
(y
i
[x, y
i
x) = y
i
+v
i
(x),
o v
i
(x) est le nombre de voisins de i dans x.
132 4 Simulation des modles spatiaux
4.4 Simulation dun processus ponctuel
Soit X un processus ponctuel (PP) sur S, un borlien born de R
d
. Si X est
un PP de Cox ou un PP du type Shot-Noise (cf. 3.3), sa simulation dcoulera
directement de celle dun PP de Poisson (cf. 4.4.3).
Si X est dni par sa densit inconditionnelle f (cf. 3.4), sa simulation
sera ralise partir dune dynamique de MH [88; 160]. Limplmentation de
cette dynamique est dcrite dans laide en ligne du package spatstat de R.
Examinons dans un premier temps la simulation conditionnelle un nombre
x de points n(x) = n.
4.4.1 Simulation conditionnelle un nombre x de points
Supposons que n(x) = n est x. Notant (x ) pour (x ), lalgo-
rithme de MH propose :
1. De changer x y = (x ), x et S, avec la densit
q(x, y) = q(x, , ).
2. Daccepter y avec la probabilit a(x, y) = a(x, , ).
Une probabilit dacceptation a(x, y) assurant la -rversibilit du noyau est,
a(x, y) = min1, r(x, y), o r(x, y) =
f(y)q(y, x)
f(x)q(x, y)
.
Si le changement x y est obtenu en supprimant un point uniformment
dans x puis en faisant natre uniformment dans S, lalgorithme est irr-
ductible et apriodique, convergeant vers : apriodique parce que la densit
de transition est > 0 ; irrductible car, on peut passer de x y en n pas, en
changeant pas pas x
i
(une mort) en y
i
(une naissance), ceci avec une densit
de probabilit > 0.
4.4.2 Simulation inconditionnelle
Supposons que la densit f est hrditaire, c--d vrie :
si pour x et S, f(x ) > 0, alors f(x) > 0
Autorisant une naissance ou une mort chaque pas de lalgorithme, les con-
gurations vont circuler dans les dirents espaces E
n
de congurations n
points. Si x E
n
, n 1, un pas de lalgorithme est :
1. Avec une probabilit
n,n+1
(x), on ajoute un point S choisi
avec la densit b(x, ) sur S.
2. Avec la probabilit
n,n1
(x) = 1
n,n+1
(x), on supprime un
point de x avec la probabilit d(x, ).
4.4 Simulation dun processus ponctuel 133
Pour n = 0, on reste dans la conguration vide avec la probabilit
0,0
() =
1
0,1
(). Le ratio de MH est :
r(x, x) =
f(x )(1
n+1,n
(x ))d(x, )
f(x)
n,n+1
(x)b(x, )
et r(x, x) = r(x, x)
1
.
La condition gnrale de rversibilit de lalgorithme de MH est (4.6). Pour
lalgorithme de Metropolis, la probabilit dacceptation est :
a(x, x ) = min1, r(x, x ) daccepter la naissance : x y = x ;
a(x, x) = min1, r(x, x) daccepter la mort : x y = x.
Proposition 4.2. Ergodicit de lalgorithme de MH
Si les deux conditions suivantes sont satisfaites :
1. Sur les lois de naissance b et de mort d : si n(x) = n, f(x ) > 0,
n+1,n
(x ) > 0 et
n,n+1
(x) > 0, alors d(x, ) > 0 et b(x, ) > 0.
2. Sur les probabilits de circuler dans les dirents espaces E
n
: n 0 et
x E
n
, 0 <
n+1,n
(x) < 1, et (4.6) est satisfaite.
alors lalgorithme de MH dcrit prcdemment ralise la simulation du PP de
densit f.
La premire condition est satisfaite si b(x, ) = b() est uniforme sur S et si
d(x, ) = d() est uniforme sur x.
Preuve. La chane est -invariante. Elle est apriodique puisque
0,1
() tant
> 0, la probabilit est > 0 de rester dans la conguration vide. Enn, lal-
gorithme est -irrductible : en eet, on passe de x = x
1
, x
2
, . . . , x
n
y = y
1
, y
2
, . . . , y
p
avec une densit de probabilit > 0 en faisant dabord
disparatre les n points de x, puis en faisant natre les p points de y. .
Pour les choix uniformes
n+1,n
= 1/2, b(x, ) = 1/(S), d(x, ) = 1/n si
x = x
1
, x
2
, . . . , x
n
et x, alors
r(x, x ) =
(S)f(x )
n(x)f(x)
.
Un pas de lalgorithme de Metropolis x y prend alors la forme suivante si
n(x) > 0 :
1. Avec la probabilit 1/2, on propose une naissance
uniforme S ; cette naissance est retenue avec la
probabilit inf1, r(x, x ) : y = x ; sinon la
configuration x est inchange :y = x.
2. Avec la probabilit 1/2, une mort a lieu en un point
uniforme de x ; on retient cette mort avec la
probabilit min1, r(x, x)
1
: y = x ; sinon, la
configuration x est inchange : y = x. Si n(x) = 0, seul
le premier pas est ralis avec la probabilit 1.
134 4 Simulation des modles spatiaux
4.4.3 Simulation de PP de Cox
La simulation dun PP de Cox (cf. 3.3) drive naturellement de la simulation
dun PP de Poisson. La simulation dun PPP() dintensit est ralise de
la faon suivante ; notons (S) =
_
S
(u)du < :
1. Tirer un entier n suivant la loi de Poisson T((S)).
2. Tirer n points x
1
, x
2
, . . . , x
n
i.i.d. de densit sur S.
x = x
1
, x
2
, . . . , x
n
est la ralisation sur S dun PPP().
La simulation dun PP de Cox dintensit alatoire ((u))
uS
sobtient
comme la simulation dun PPP conditionnel dintensit . La simulation du
champ de densit , continu sur S, sera spcique au processus de Cox consi-
dr. Par exemple, la simulation de la log-intensit conditionnelle log (u) =
t
z(u) +(u) dun PP de Cox log-gaussien (3.3) sobtiendra partir des co-
variables observables (z(u))
uS
et de la simulation du processus gaussien
par lune des mthodes proposes au 4.7.
La simulation dun PP doublement poissonnien (3.4) sobtient en deux
tapes : la premire consiste dterminer les positions c et lintensit du
PPP parents ; la deuxime tape ralise la simulation de la dissmination
(cluster) autour de chaque parent suivant une densit spatiale k(c, ). Des
parents c extrieurs S pouvant avoir une descendance dans S, on devra
sassurer que la simulation prend en compte cet eet de bord (cf. [160]).
4.5 Performance et contrle des mthodes MCMC
La dicult tant thorique que pratique dans lutilisation dun algorithme
MCMC est de savoir partir de quel instant n
0
(burn-in time) on peut consi-
drer que la chane associe X = (X
n
) est entre dans son rgime stationnaire :
valuation de n
0
telle que la loi de X
n
, n n
0
, est proche de la loi station-
naire de la chane ? contrle de |X
n
|
V T
? Nous naborderons ici que
trs brivement cette question et invitons le lecteur se reporter entre autres
[89; 188] et aux articles mentionns ci-aprs.
4.5.1 Performances dune mthode MCMC
Deux critres peuvent tre utiliss pour valuer la performance dune mthode
MCMC :
1. Le contrle de la vitesse de convergence vers 0 de la norme en variation
|X
k
|
V T
=
_
_
P
k
_
_
V T
si X
0
.
2. Le contrle de la variance v(f, P) = lim
n
1
n
V ar(
n
i=1
f(X
i
)) dune
moyenne empirique le long dune trajectoire de la chane.
4.5 Performance et contrle des mthodes MCMC 135
Le rsultat de Peskun (4.10) dit que, pour le critre de la variance v(f, P),
lalgorithme de Metropolis est le meilleur dans la classe des algorithmes de
MH. La variance v(f, P) peut tre explicite partir du spectre de P si est
ni m points : dans ce cas, la chane tant rversible, P est auto-adjointe dans
l
2
(), lespace R
m
tant muni du produit scalaire u, v)
m
1
u
k
v
k
(k). P
est donc diagonalisable sur R; si on note
1
= 1 >
2
> . . . >
m
> 1 son
spectre et e
1
= 1, e
2
, . . . , e
m
la base propre associe choisie orthonormale de
l
2
(), on a [128] :
v(f, P) =
m
k=2
1 +
k
1
k
f, e
k
)
2
Pour tre utile, la dcomposition spectrale de P doit tre connue ce qui est
rarement le cas.
Le contrle de la convergence
_
_
P
k
_
_
V T
0 est une question cen-
trale permettant thoriquement de proposer une rgle darrt de lalgo-
rithme. Si des rsultats existent (thorme de Perron-Frobnius si est ni,
_
_
P
k
_
_
V T
C()(sup[
2
[ , [
m
[)
k
pour une transition rversible), l en-
core lvaluation eective de la vitesse de convergence de lalgorithme est en
gnral impossible car lie une description prcise du spectre de P, et rares
sont les cas o cette description prcise est possible [61; 191]. Dautre part,
lorsque des contrles explicites existent ((4.3), majoration par le coecient
de contraction de Dobrushin de la transition [65; 120; 96, 6.1]), ils sont g-
nralement inutilisables, un contrle du type
_
_
P
k
_
_
V T
(1 m)
k
(cf.
Th. 4.2) ntant utile que si m nest pas trop petit : or, pour prendre un
exemple, pour lchantillonneur de Gibbs squentiel dun modle dIsing iso-
tropique aux 4-ppv sur S = 1, 2, . . . , 10
2
et de paramtres = 0 et = 1,
m = 2
100
, = inf
i,xi,x
i
i
(x
i
[x
i
)
m
et m (6.8 10
4
)
100
!
Une alternative, prsente au 4.6, consiste utiliser un algorithme de
simulation exacte [177].
Dans la pratique de la simulation par une mthode MCMC, plusieurs as-
pects sont considrer : choix de lalgorithme, facilit dimplmentation et
rapidit de lalgorithme, choix de ltat initial, utilisation dune seule chane
ou de plusieurs chanes indpendantes, temps n
0
de stationnarisation de la
chane, sous-chantillonnage au pas K de la chane garantissant la presque
indpendance de la sous-suite (X
Kn
)
n
. Nous nous limiterons ici la pr-
sentation de deux lments de rponse concernant lvaluation du temps de
stationnarisation n
0
et renvoyons [89] et [188] pour approfondir le sujet.
4.5.2 Deux mthodes de contrle de la convergence
Une approche consiste suivre lvolution en k dune statistique h(X
k
) de la
chane X = (X
k
). Par exemple, si appartient une famille exponentielle, on
peut prendre pour h la statistique exhaustive de . La Fig. 4.2 montre dune
part lvolution de n(X
k
) et de s(X
k
) dans la simulation de MH dun processus
de Strauss et dautre part celle de lautocorrlation empirique temporelle pour
136 4 Simulation des modles spatiaux
0.2 0.4 0.6 0.8
0
.
2
0
.
4
0
.
6
0
.
8
1
.
0
0.0 0.2 0.4 0.6 0.8 1.0
0
.
2
0
.
4
0
.
6
0
.
8
(a) (b)
0 200 400 600 800 1000
1
0
1
5
2
0
2
5
3
0
Iterations
n
(
x
)
0 200 400 600 800 1000
5
0
1
0
0
1
5
0
Iterations
s
(
x
)
(c) (d)
0 20 40 60 80 100
1
.
0
0
.
5
0
.
0
0
.
5
1
.
0
Lag
A
u
t
o
c
o
r
r
e
l
a
t
i
o
n
0 20 40 60 80 100
1
.
0
0
.
5
0
.
0
0
.
5
1
.
0
Lag
A
u
t
o
c
o
r
r
e
l
a
t
i
o
n
(e) (f)
Fig. 4.2. Simulation inconditionnelle dun processus de Strauss X de paramtres
= 40, = 0.8, r = 0.4 sur S = [0, 1]
2
par lalgorithme de Metropolis avec choix
uniformes : (a) X0 PPP(40), (b) X1000. Contrle de la convergence de lalgorithme
avec les statistiques nS(X
k
) (c) et s(X
k
) (d) au cours du temps et leurs fonctions
dauto-corrlations (e) et (f).
4.5 Performance et contrle des mthodes MCMC 137
0 200 400 600 800 1000
1
0
1
5
2
0
2
5
Iterations
n
(
x
)
0 5 10 15 20 25 30
1
.
0
0
.
5
0
.
0
0
.
5
1
.
0
Lag
A
u
t
o
c
o
r
r
e
l
a
t
i
o
n
0 200 400 600 800 1000
1
0
2
0
3
0
4
0
5
0
6
0
7
0
Iterations
s
(
x
)
0 5 10 15 20 25 30
1
.
0
0
.
5
0
.
0
0
.
5
1
.
0
Lag
A
u
t
o
c
o
r
r
e
l
a
t
i
o
n
Fig. 4.3. Sous-chantillonnage de la chane de simulation dun processus de Strauss
(cf. Fig. 4.2) : gauche les statistiques nS(X
sk
) et s(X
sk
), k = 0, 1, 2, . . . avec
s = 100 ; droite les autocorrlations correspondantes.
chacune des statistiques : le choix de n
0
= 300 comme temps dentre en
rgime stationnaire semble raisonnable et un dcalage temporel de K = 100
dcorrle approximativement h(X
t
) et h(X
t+K
) (cf. Fig. 4.3).
Une autre approche consiste [80] drouler m chanes indpendantes en
parallle, chanes initialises en des tats disperss, et comparer leurs va-
riabilits. On suit alors les m trajectoires h
(i)
k
= h(X
(i)
k
), k 0. Quand
les chanes atteignent leurs rgimes stationnaires, leurs variances doivent tre
proches. Faisant lanalyse de la variance de ces m chanes, on calcule B (beet-
wen) et W (within) les variabilits inter-chanes et intra-chanes :
B =
1
m1
m
i=1
(h
(i)
h)
2
, W =
1
m1
m
1
S
2
i
,
o S
2
i
= (n 1)
1
n1
k=0
(h
(i)
k
h
(i)
)
2
, h
(i)
tant la moyenne empirique de
h sur la i-ime chane, h la moyenne sur toutes les chanes. On peut estimer
V ar
(h) soit par V = W+B, soit par W : V estime sans biais cette variance si
138 4 Simulation des modles spatiaux
X
(i)
0
, mais V surestime la variance sinon. Quant W, il sous-estime cette
variance pour n ni car la chane na pas visit tous les tats de X. Cependant
les deux estimateurs convergent vers V ar
(h). On peut donc baser un contrle
de la convergence des chanes sur la statistique R = V/W : si les chanes sont
entres en rgime stationnaire, R
= 1 ; sinon R 1 et on doit poursuivre les
itrations.
4.6 Simulation exacte depuis le pass
La dicult dans lutilisation dune mthode MCMC rsidant dans du biais
dinitialisation | P
k
|
V T
, Propp et Wilson [177] ont propos une m-
thode de simulation exacte par couplage depuis le pass (Coupling From The
Past, ou CFTP), simulation qui se libre de ce problme. Leur ide, simple
et performante, a innov les techniques de simulation. Pour plus dinforma-
tions, on pourra consultera le site http ://dbwilson.com/exact/ ainsi que
larticle de Diaconis et Freedman [60].
4.6.1 Lalgorithme de Propp et Wilson
Nous nous limiterons ici la description de lalgorithme de Propp et Wilson
sur un espace ni = 1, 2, . . . , r o P est une transition ergodique telle que
est P-invariante. Les ingrdients de la mthode CFTP sont les suivants :
(a) Le simulateur o = (o
t
)
t1
avec o
t
= f
t
(i), i o f
t
(i) suit la
loi P(i, ). Les gnrateurs (o
t
) sont i.i.d. pour des t dirents mais les
f
t
(i), i peuvent ventuellement tre dpendants. Litration entre
t et t + 1 (t 1) est,
1. Pour chaque i , simuler i f
t
(i) .
2. Mmoriser ces transitions i f
t
(i), i de t t +1.
La simulation remonte dans le pass en dmarant de t = 0.
(b) Le ot F
t2
t1
: de t
1
t
2
, t
1
< t
2
0, est la transformation
F
t2
t1
= f
t21
f
t22
. . . f
t1+1
f
t1
.
F
t2
t1
(i) est ltat en t
2
de la chane initialise en i au temps t
1
. F
0
t
, t < 0,
vrie :
F
0
t
= F
0
t+1
f
t
, avec F
0
0
= Id. (4.14)
F
0
t
sobtient rcursivement en utilisant r places-mmoires.
(c) Un instant de couplage pour (o) est un T < 0 t.q. F
0
T
est constante,
i
t.q. : i , F
0
T
(i) = i
.
4.6 Simulation exacte depuis le pass 139
1
2
3
4
t =0 t =1
1
2
3
4
t =0 t =1 t =2
1
2
3
4
t =0 t =1 t =2 t =3
Fig. 4.4. Exemple de trajectoires de lalgorithme de Propp et Wilson sur un espace
4 tats : le temps de couplage est T = 3, ltat de couplage i = 2 ; les chemins
rtenus de lalgorithme sont indiqus avec des lignes ().
Un exemple de droulement de cet algorithme est donn la Fig. 4.4. On
commence par choisir les ches alatoires i j qui vont relier les tats i au
temps t = 1 avec des tats j au temps t = 0 (j est choisi avec la loi P(i, )),
ceci pour tous les i . Si toutes les ches ont un mme tat terminal j = i
,
i
est ltat de couplage pour un temps de couplage T = 1. Sinon, on rpte
la mme opration entre linstant t = 2 et linstant t = 1, puis on trace les
chemins de longueur 2 issus de tous les tats i au temps t = 2, chemins qui
sappuyent sur les deux familles de ches prcdentes. De deux choses lune :
soit tous les chemins (de longueur 2) se terminent en un mme tat i
, et
alors i
est ltat de couplage pour le temps de couplage T = 2 ; soit ce nest
pas le cas, et on itre lalgorithme entre linstant t = 3 et t = 2. Et ainsi
de suite jusqu trouver le premier instant de couplage. Dans cet exemple,
140 4 Simulation des modles spatiaux
le temps de couplage est T = 3 et ltat de couplage i
= 2 : il aura fallu
remonter 3 fois dans le pass avant que tous les chemins issus de ((i, t), i )
se couplent linstant t = 0.
Si quel que soit leur tat initial en T < 0, les r-chanes se couplent en i
linstant 0, T est un temps de couplage depuis le pass, i
un tat de couplage.
La relation (4.14) nous dit que si T
t
< T, alors T
t
est encore un temps de
couplage avec le mme tat de couplage. Si
T
= supt < 0 : F
0
t
() est constante
est le premier instant de couplage, on note F
0
= F
0
T
= F
0
M
ltat de
couplage commun. Le rsultat de simulation exacte est le suivant :
Proposition 4.3. Le temps de couplage T
est presque srement ni. Ltat
de couplage F
0
T
suit la loi .
Preuve : La chane tant ergodique, il existe k 1 tel que, pour tout i, j,
P
k
(i, j) > 0. Ainsi, F
t
tk
a une probabilit > 0 dtre constante. Les variables
F
0
k
, F
k
2k
, F
2k
3k
, . . . tant i.i.d. avec une probabilit > 0 dtre constante,
le lemme de Borel-Cantelli nous dit quau moins un de ces vnements est
ralis avec une probabilit 1 : P(T
< ) = 1.
La suite o
t
= f
t
(i), i I, t = 1, 2, . . . tant i.i.d., F
1
et F
0
ont mme loi . Dautre part, F
1
P = F
0
: on a donc P = , soit =
puisque la loi invariante est unique.
.
o
1
= f
1
(i), i est le germe de la simulation. Le test darrt de la pro-
cdure tant implicite, il ny a pas de biais dinitialisation dans la simulation.
4.6.2 Deux amnagements de lalgorithme
Pour obtenir le ot F
0
t
, il faut eectuer (t)r oprations (t > 0 remontes
dans le pass et chaque fois r simulations). Ceci est irraliste car en gnral,
r, le nombre de points de , est trs grand. De plus, r places-mmoires sont
ncessaires. Propp et Wilson proposent deux amnagements qui lvent ces
dicults : le premier propose un simulateur o
t
= f
t
(i), i obtenu
partir dun unique germe U
t
uniforme ; le deuxime, ralisable si est muni
dun ordre partiel , est de construire un algorithme monotone pour lequel
il sut de tester le couplage partiel F
0
T
(i) = F
0
T
(i) pour seulement deux tats
extrmaux, ce contrle testant le couplage pour tous les tats.
Un unique germe pour dnir o
t
.
Soit (U
t
, t 1) une suite i.i.d. de variables uniformes sur [0, 1] et : E
[0, 1] [0, 1] mesurable ralisant la transition P (cf. Ex. 4.2) :
i, j : P(i, U
1
) = j = P(i, j).
Ainsi, f
t
(i) = (i, U
t
) ralise P(i, ). A chaque instant, une seule simulation
est ncessaire mais il faut calculer et comparer toutes les valeurs (i, U
t
) pour
i . Le cas dune chane monotone permet de palier cette dicult.
4.6 Simulation exacte depuis le pass 141
Algorithme de Monte Carlo monotone
Supposons que soit muni dun ordre partiel x y pour lequel il existe un
lment minimal 0 et un lment maximal 1 :
x : 0 x 1.
On dira que lalgorithme o est monotone si la rgle de mise jour prserve
lordre :
x, y t.q. x y alors u [0, 1] : (x, u) (y, u).
Dans ce cas, F
t2
t1
(x, u) =
t21
(
t22
(. . .
t1
(x, u
t1
), . . . , u
t22
), u
t21
) o u =
(. . . , u
1
, u
0
) et la monotonie assure que :
x y et t
1
< t
2
, F
t2
t1
(x, u) F
t2
t1
(y, u).
En particulier, si u
T
, u
T+1
, . . . , u
1
sont tels que F
0
T
(0, u) = F
0
T
(1, u),
alors T est un temps de couplage depuis le pass : il sut de suivre les
deux trajectoires issues de 0 et de 1 pour caractriser le temps de cou-
plage, les autres trajectoires F
t
T
(x), T t 0 tant comprises entre
F
t
T
(0), T t 0 et F
t
T
(1), T t 0.
On peut raliser lalgorithme de simulation de la faon suivante : on initia-
lise successivement les deux chanes aux instants k pour k = 1, 2, 2
2
, 2
3
, . . .
jusqu la premire valeur 2
k
telle que F
0
2
k
(0, u) = F
0
2
k
(1, u). Les valeurs
de u
t
sont progressivement mises en mmoire. Le nombre doprations est
2 (1 + 2 + 4+ . . . + 2
k
) = 2
k+2
. Comme T
> 2
k1
, au pire le nombre
doprations est 4 fois le nombre optimal 2T
de simulations.
Exemple 4.4. Simulation dun modle dIsing attractif
S = 1, 2, . . . , n, = 1, +1
S
(r = 2
n
) est muni de lordre :
x y i S, x
i
y
i
.
Il y a un tat minimal, 0 = (x
i
= 1, i S) et un tat maximal, 1 =
(x
i
= +1, i S). On dit que la loi dIsing est attractive si, pour tout i,
x y
i
(+1[x
i
)
i
(+1[y
i
). (4.15)
Il est facile de voir que si est associe lnergie
U(x) =
i
x
i
+
i<j
i,j
x
i
x
j
,
alors est attractive si, pour tout i, j,
i,j
0. Pour un modle dIsing
attractif, il existe une dynamique monotone : xons un site i et notons x
(resp. x ) la conguration (+1, x
i
) (resp. (1, x
i
)) : (4.15) quivaut :
142 4 Simulation des modles spatiaux
x y
(x )
(x ) +(x )
(y )
(y ) +(y )
.
La dynamique dnie par :
f
t
(x, u
t
) =
_
f
t
(x, u
t
) = x si u
t
<
(x)
(x)+(x)
,
f
t
(x, u
t
) = x sinon,
est monotone si est attractif.
Lalgorithme de Propp et Wilson utilise lexistence dun lment minimal
0 et un lment maximal 1 pour la relation dordre sur . Cette condition
nest pas toujours vrie : par exemple, si pour un PP sur S la relation din-
clusion sur les congurations admet la conguration vide comme lment mi-
nimal, elle nadmet pas dlment maximal. Dans ce contexte, Haggstrom [104]
et Kendall et Mller [130] gnralisent lalgorithme CFTP un algorithme
CFTP domin de simulation exacte pour une loi dnie sur un espace dtats
plus gnral.
4.7 Simulation dun champ gaussien sur S R
d
On veut simuler un champ gaussien Y centr sur S R
d
, S ni ou S continu.
Si S = s
1
, . . . , s
m
R
d
est ni, Y = (Y
s1
, Y
s2
, . . . , Y
sm
) est un vecteur
gaussien ; si sa covariance = Cov(Y ) est d.p., il existe une matrice T tri-
angulaire infrieure de dimension m m t.q. = T
t
T (dcomposition de
Choleski de ). Alors, Y = T ^
m
(0, ) si ^
m
(0, I
m
). La mthode
de simulation associe cette dcomposition est gnrale condition de sa-
voir calculer T, ce qui devient dicile si m est grand ; par contre, une fois T
explicite, il est facile dobtenir dautres simulations de Y partir dautres
chantillons de . Comme on la vu prcdemment (cf. 4.3.2), une mthode
alternative, bien adapte au cas dun champ gaussien markovien, consiste
utiliser une simulation par chantillonneur de Gibbs.
Si S est un sous-ensemble continu S R
d
, dautres mthodes, utiles
en gostatistique, permettent la simulation du champ. Nous en dcrivons
quelques unes, invitant le lecteur consulter le livre de Lantujoul [139] pour
une prsentation trs complte du sujet.
4.7.1 Simulation dun champ gaussien stationnaire
Supposons que lon sache simuler sur S R
d
un champ X stationnaire de L
2
,
non-ncessairement gaussien, centr, de variance 1 et de fonction de corrlation
(). Soit X
(i)
, i N une suite i.i.d. de tels champs et
Y
(m)
s
=
1
m
m
i=1
X
(i)
s
.
4.7 Simulation dun champ gaussien sur S R
d
143
Alors, pour m grand, Y
(m)
ralise approximativement un champ gaussien sta-
tionnaire centr de corrlation . Examinons alors comment simuler le champ
gnrateur X. Pour la ralisation de ces simulations, nous renvoyons le lecteur
laide en ligne du package RandomFields.
La mthode spectrale
La formule C(h) =
_
R
d
e
iu,h)
F(du) liant covariance et mesure spectrale
montre que F est une probabilit si V ar(X
s
) = 1. Si V est une v.a. de loi F
et U |(0, 1) sont indpendantes, on considre le champ X = (X
s
) dni
par :
X
s
=
2 cos(V, s) + 2U).
Comme
_
1
0
cos(V, s) + 2u)du = 0, E(X
s
) = E(E(X
s
[V )) = 0 et,
C(h) = 2
_
R
d
_
1
0
cos(v, s) + 2u) cos(v, (s +h)) + 2u)duF(dv)
=
_
R
d
cos(v, h))F(dv).
X est donc un champ centr de covariance C(). Ceci suggre lalgorithme :
1. Simuler u
1
, . . . , u
m
|(0, 1) et v
1
, . . . , v
m
F, tous indpendants.
2. Pour s S, retourner les valeurs
Y
(m)
s
=
_
2
m
m
i=1
cos(v
i
, s) + 2u
i
).
Pour choisir m, on contrlera que les moments dordre 3 et 4 de Y
(m)
s
sapprochent de ceux dune gaussienne. Cette simulation est ralisable si on
sait approcher la mesure spectrale F. Cest le cas si F est support born ou
si F admet une densit dcroissance rapide linni. Sinon, on peut utiliser
la mthode suivante dite des bandes tournantes.
La mthode des bandes tournantes
Cette mthode, propose par Matheron [139], simule un processus isotropique
sur R
d
partir dun processus stationnaire sur R
1
(cf. 1.2.2). Soit o
d
= s
R
d
: |s| = 1 la sphre de rayon 1 de R
d
, Z un processus stationnaire sur
R
1
, centr, de covariance C
Z
et V une direction suivant la loi uniforme sur
o
d
. On pose Y
s
= Z
s,V )
, s S ; Y
s
est centr puisque E(Z
s,V )
[V = v) =
E(Z
s,v)
) = 0, de covariance
C
Y
(h) = E
V
[E(Z
(s+h),V )
Z
s,V )
[V )]
= E
V
[C
Z
(h, V ))] =
_
S
d
C
Z
(h, v))(dv),
144 4 Simulation des modles spatiaux
o est la loi uniforme sur o
d
. Considrons alors lalgorithme :
1. Simuler m directions v
1
, . . . , v
m
|(o
d
).
2. Simuler z
(1)
, . . . , z
(m)
, m processus indpendants de corrlations
respectives C
Z
(h, v
i
)), i = 1, . . . , m.
3. Pour s S retourner les valeurs : Y
(m)
s
= m
1/2
m
i=1
z
(i)
s,vi)
.
Notant C
Y
(h) = C
1
(|h|) = C(h, v)) pour C = C
Z
, la correspondance
entre C
1
et C est donne, pour d = 2 et d = 3 :
d = 2 : C(r) =
1
_
0
C
1
(r sin)d et C
1
(r) = 1 +r
_
/2
0
dC
dr
(r sin )d
(4.16)
d = 3 : C(r) =
_
1
0
C
1
(tr)dt et C
1
(r) =
d
dr
(rC(r)) (4.17)
Par exemple, pour la covariance exponentielle C(h) =
2
exp|h| /a
sur R
3
, C
1
(r) =
2
(1 r/a) exp(r/a), r 0.
Dans la pratique, C est donne et il faut commener par calculer C
1
(cf.
Chils et Delner [43, p. 648] pour les correspondances entre C et C
1
). Lexa-
men des formules (4.16) et (4.17) explique pourquoi, pour simuler un champ
sur R
2
, on utilisera plus volontiers la trace sur R
2
dune simulation par bandes
tournantes sur R
3
que directement les bandes tournantes sur R
2
. Par exemple,
les simulations de la Fig. 4.5 sont les traces sur R
2
de simulations par bandes
tournantes dun champ sur R
3
de covariance isotropique exponentielle de pa-
ramtres
2
= 4 et a = 10.
Fig. 4.5. Deux ralisations dun champ gaussien de covariance exponentielle ob-
tenues par la mthode avec m bandes tournantes : (a) m = 2, (b) m = 10. La
simulation est ralise sur grille discrte 100 100.
4.7 Simulation dun champ gaussien sur S R
d
145
Fig. 4.6. (a) Ralisation sur une grille rgulire de 100 100 de[0, 1]
2
dun proces-
sus gaussien centr de covariance C(h) = exp(h) ; (b) 25 points chantillonns ;
(c) krigeage tant donn les valeurs aux 25 points de (b) ; (d) simulation condi-
tionnelle ces 25 valeurs ; (e) simulation conditionnelle 50 valeurs ; (f) simulation
conditionnelle 100 valeurs.
146 4 Simulation des modles spatiaux
4.7.2 Simulation gaussienne conditionnelle
Si Y est un champ gaussien centr sur R
d
, on veut simuler Y sur S C R
d
conditionnellement lobservation y
C
de Y sur un ensemble ni C (cf.
Fig. 4.6). Pour cela, on considre une ralisation X = X
s
, s S ind-
pendante mais de mme loi que Y ,
X
s
, s S le krigeage simple de X sur
les valeurs X
C
= X
c
, c C et les dcompositions :
X
s
=
X
s
+ (X
s
X
s
), Y
s
=
Y
s
+ (Y
s
Y
s
), s S.
On propose lalgorithme suivant :
1. Calculer le prdicteur du krigeage simple
Y
s
, s S, sachant
Y
C
.
2. Simuler X sur S C de mme loi que Y , indpendant de Y .
3. Calculer le krigeage simple
X
s
, s S, sachant X
C
.
4. Retourner les valeurs
Y
s
=
Y
s
+ (X
s
X
s
) pour s D.
Y
s
ralise la simulation conditionnelle souhaite. En eet,
Y
c
=y
c
+X
c
X
c
=y
c
si c C. Dautre part, (X
s
X
s
), s S et (Y
s
Y
s
), s S ont mme
loi, la loi du rsidu conditionnel de Y en s, cette loi ntant autre que la loi
recentre de Y conditionnelle y
C
.
Exercices
4.1. Conditions ncessaires pour la convergence dune chane de
Markov.
Montrer que si une chane de Markov de transition P vrie que, pour tout
x et pour tout vnement A, P
n
(x, A) , alors est P-invariante, P est
-irrductible et P est apriodique.
4.2. Simulation dune chane de Markov sur un espace dtat discret.
1. Soit P = (P
ij
) une transition sur = 1, 2, . . . et : [0, 1]
dnie par (i, u) = j, si u [
j1
l=1
P
i,l
,
j
l=1
P
i,l
[, i, j , avec la
convention
0
l=1
P
i,l
= 0 et, si est ni, le dernier intervalle semi-ouvert
est ferm droite.
Montrer que si (U
n
) est une suite i.i.d. de v.a. |(0, 1), la suite X
0
, X
n+1
=
(X
n
, U
n
), n 1 ralise la simulation dune chane de Markov de tran-
sition P.
2. Vrier que la chane sur 1, 2, 3, 4 de transition : P(1, 1) = P(1, 2) =
1/2 = P(4, 3) = P(4, 4), P(2, 1) = P(2, 2) = P(2, 3) = 1/3 = P(3, 2) =
P(3, 3) = P(3, 4) est irrductible et apriodique. Quelle est sa loi inva-
riante . Prenant comme valeur initiale X
0
= 1, simuler la chane. Vrier
que lestimation empirique
n
(resp.
P
n
i,j
) de (resp. de P
i,j
) base sur
X
1
, X
2
, . . . , X
n
converge vers (resp. P
i,j
) si n .
4.7 Simulation dun champ gaussien sur S R
d
147
4.3. Simulation du modle noyau dur (cf. Exemple 4.1).
Choissisant le tore S = 1, 2, . . . , 20
2
et la relation de voisinage aux
4-ppv, raliser la simulation de la loi uniforme sur lespace des congura-
tions noyau dur. Evaluer :
1. Le nombre moyen de sites occups pour une conguration noyau dur.
2. Lintervalle de conance centr au niveau 90% pour ce nombre.
4.4. Simulation dun modle de Gibbs bivari.
On considre le processus de Gibbs Z
i
= (X
i
, Y
i
) 0, 1
2
au 4-ppv sur
S = 1, 2, . . . , n
2
dnergie :
U(z) =
iS
1
(z
i
) +
i,j)
2
(z
i
, z
j
)
o
1
(z
i
) = x
i
+y
i
+x
i
y
i
et
2
(z
i
, z
j
) = x
i
x
j
+y
i
y
j
.
1. Dterminer les lois
i
(z
i
[z
i
),
1
i
(x
i
[x
i
, y),
2
i
(y
i
[x, y
i
).
2. Construire lchantillonneur de Gibbs bas sur
1
i
,
2
i
, i S.
4.5. Modles de Matrn-I et Matrn-II.
1. Soit X un PPP() homogne. Le modle de Matrn-I [154; 48] sobtient
en eaant, dans X, tous les couples de points distance r :
X
I
= s X : s
t
X, s
t
,= s, |s s
t
| > r.
Montrer que lintensit du nouveau processus vaut
= expr
2
.
Mettre en oeuvre la simulation dun tel processus sur [0, 1]
2
avec r = 0.02
et = 30.
2. Soit X un PPP() homogne. A chaque point s de X on attache une
marque continue indpendante Y
s
de loi densit h(). Le modle de
Matrn-II sobtient partir de X en eaant un point s X sil existe
s
t
X une distance r et si de plus Y
s
< Y
s
. Mettre en oeuvre la
simulation dun tel processus sur [0, 1]
2
avec r = 0.02, = 30 et h la
distribution exponentielle de moyenne 4.
4.6. Simulation dun champ gaussien bivari.
On veut simuler la loi gaussienne bivarie sur S dnergie :
U(x, y) =
iS
(x
2
i
+y
2
i
)
i,j)
(x
i
y
j
+x
j
y
i
), [[ < 1/2.
Dterminer les lois conditionnelles
i
(z
i
[z
i
),
1
i
(x
i
[x
i
, y) et
2
i
(y
i
[x, y
i
). Pro-
poser deux procdures de simulation.
148 4 Simulation des modles spatiaux
4.7. Simulation dune permutation.
Soit
n
lensemble des permutations de 1, 2, . . . , n et la loi uniforme sur
n
. Montrer que la chane de transition P sur
n
qui permute au hasard deux
indices i et j est -rversible et converge vers .
4.8. Simulation dune dynamique spatio-temporelle.
Soit X = (X(t), t 0) une chane de Markov sur = 0, 1
S
, S =
1, 2, . . . , n Z, de transition de x = x(t 1) y = x(t),
P(x, y) = Z(x)
1
exp
iS
y
i
[ +v
i
(t) +w
i
(t 1)],
avec v
i
(t) = y
i1
+y
i+1
, w
i
(t 1) = x
i1
+x
i
+x
i+1
et x
j
= y
j
= 0 si j / S.
1. Simuler cette dynamique par chantillonneur de Gibbs.
2. Pour = = 2 et n = 100, tudier lvolution des taches N
t
= i S :
X
i
(t) = 1 en fonction de .
3. Proposer un modle analogue sur S = 1, 2, . . . , n
2
Z
2
et le simuler.
4.9. Simulation par change de spins.
Raliser la simulation par change de spins du modle dIsing aux 4-ppv de
paramtres = 0 et sur le tore 1, 2, . . . , 64
2
, la conguration initiale tant
quilibre entre les deux spins +1 et 1. Calculer la corrlation empirique
() distance 1 et construire la courbe empirique (). Mme tude en
utilisant lchantillonneur de Gibbs.
4.10. Simulation dune texture niveau de gris.
Un -modle de texture niveaux de gris 0, 1, . . . , G1 a pour dnergie :
U(x) =
i,j)
d
(x
i
x
j
),
d
(u) =
1
1 + (u/d)
2
.
Pour ce modle, les contrastes de niveau de gris augmentent avec d et
contrle la corrlation spatiale. Simuler direntes textures par chantillon-
neur de Gibbs en faisant varier les paramtres et d ainsi que le nombre de
niveau de gris G.
4.11. Dynamiques de relaxation site par site pour simuler .
On considre le modle dIsing (x) = Z
1
exp
i,j)
x
i
x
j
sur 1, +1
S
o S = 1, 2, . . . , n
2
est muni de la relation aux 4-ppv. On sintresse aux
dynamiques squentielles o, chaque pas, la relaxation P
s
est eectue en un
seul site s, c--d P
s
(x, y) = 0 si x
s
,= y
s
. De plus, si m = m(s) 0, 1, 2, 3, 4
compte le nombre de +1 voisins de s, on impose que P
s
ne dpende que de
m (P
s
(x, y) = P
s
(x
s
y
s
[m)) et soit symtrique (P
s
(x
s
y
s
[4 m) =
P
s
(x
s
y
s
[m)).
1. Montrer que P
s
dpend de 5 paramtres a
0
= P
s
(+1 1[m = 2), a
1
=
P
s
(+1 1[m = 3), a
2
= P
s
(1 +1[m = 3), a
3
= P
s
(+1 1[m =
4) et a
4
= P
s
(1 +1[m = 4).
4.7 Simulation dun champ gaussien sur S R
d
149
2. Montrer que P
s
est -rversible si et seulement si a
3
= a
4
exp(8) et
a
1
= a
2
exp(4). On note alors a = (a
0
, a
2
, a
4
) ]0, 1]
3
.
3. Donner les valeurs de a correspondant lchantillonneur de Gibbs et
la dynamique de Metropolis.
4. Montrer que la dynamique associe P
s
pour un choix uniforme de s est
ergodique.
4.12. Modle de Strauss.
Mettre en oeuvre la dynamique de Metropolis pour simuler un processus de
Strauss sur [0, 1]
2
n = 50 points. Examiner les congurations simules pour
= 0.01, 0.5, 1, 2, 10 et r = 0.05.
4.13. Reconstruction dun systme de failles.
Une faille sur S = [0, 1]
2
est identie par une droite d coupant S. A chaque
faille d est associe une valuation V
d
: S 1, +1 constante sur chaque
demi-espace dni par d. On sait que n failles R = d
1
, d
2
, . . . , d
n
coupent S
(on connat n, mais pas R) ; ces n failles conduisent une valuation rsultante
V
R
(z) =
n
i=1
V
di
(z) pour z S. Linformation disponible est la suivante :
on dispose de m puits localiss en m sites connus de S, A = z
1
, z
2
, . . . , z
m
et on observe V
i
= V
R
(z
i
) sur A. On veut reconstruire R. Ce problme peut
tre vu comme un problme de simulation de n droites intersectant S sous la
contrainte (C) :
C(R) =
m
i=1
(V
R
(z
i
) V
i
)
2
= 0.
Raliser la simulation de R sous (C) pour la distribution a priori sui-
vante : (i) les n-droites sont i.i.d. uniformes et coupent S ; (ii) indpendam-
ment, les valuations associes chacune dentre elles sont i.i.d. uniformes sur
1, +1.
Indications : (i) une droite d(x, y) = xcos +y sin r = 0 est paramtre
par (, r) ; identier le sous-ensemble [0, 2[[0, +[ des droites coupant
S ; une droite au hasard correspond au choix dun point au hasard de ; (ii)
la valuation associe d est caractrise par V
d
(0) =
d
d(0, 0), o les
d
sont i.i.d. uniformes sur 1, +1, indpendants du tirage des droites.
4.14. Simulation sequentielle.
Soit S = s
1
, s
2
, . . . un sous-ensemble discret de R
2
. En utilisant le krigeage
simple, mettre en oeuvre une procdure rcursive de simulation sur S du
processus gaussien centr de covariance C(h) = e
|h|/4
.
4.15. Simulation de textures binaires markoviennes.
On considre le tore bidimensionnel S = 1, 2, . . . , n
2
muni de la relation
de voisinage : (i, j) (i
t
, j
t
) si i i
t
est congrue n et j = j
t
ou bien si
i = i
t
et j j
t
est congrue n. On considre un champ dIsing X sur S,
150 4 Simulation des modles spatiaux
tats 1, +1, dont les potentiels, invariants par translation, sont associs
aux quatre familles de potentiels de paires :
1,i,j
(x) =
1
x
i,j
x
i+1,j
,
2,i,j
(x) =
2
x
i,j
x
i,j+1
,
3,i,j
(x) =
1
x
i,j
x
i+1,j+1
et
4,i,j
(x) =
2
x
i,j
x
i+1,j1
X est un champ de Markov aux 8-ppv de paramtre = (
1
,
2
,
1
,
2
).
1. Dmontrer que la loi marginale en chaque site est uniforme : P(X
i
=
1) = P(X
i
= +1).
2. Ecrire lalgorithme de simulation de X par chantillonnage de Gibbs.
4.16. Bande de conance sur une corrlation spatiale.
On considre le modle dIsing isotropique sur le tore bidimensionnel S =
1, 2, . . . , n
2
dnergie U(x) =
s,t)
x
s
x
t
, s, t) tant la relation de voisi-
nage aux 4-ppv (modulo n pour les points du bord).
1. Dmontrer que E(X
i
) = 0 et V ar(X
i
) = 1.
2. On note () = E(X
i,j
X
i+1,j
) la corrlation distance 1. Un estimateur
naturel de cette corrlation est :
() =
1
n
2
(i,j)S
X
i,j
X
i+1,j
,
o X
n+1,j
est identi X
1,j
. Vrier que () estime sans biais ().
3. Comme cest le cas pour les lois marginales dun champ de Gibbs, la cor-
respondance () est analytiquement inconnue. Une faon de lappro-
cher est dutiliser N ralisations i.i.d. de X par une mthode MCMC, par
exemple par chantillonneur de Gibbs. Mettre en oeuvre cette procdure
et dterminer la loi empirique de () ainsi que lintervalle de conance
bilatral et symtrique de () au niveau 95%. Appliquer la mthode pour
les valeurs = 0 1 par pas de 0.1 .
4. On se place dans la situation dindpendance = 0. Dmontrer que
V ar( (0)) = n
2
. Vrier que, notant Z
ij
= X
i,j
X
i+1,j
, Z
ij
et Z
i
j
sont
indpendantes si j ,= j
t
ou si [i i
t
[ > 1. En dduire quil est raisonnable
de penser que, en situation dindpendance des X
ij
, () est proche
dune variable^(0, n
2
) pour n assez grand. Tester cette armation en
utilisant un N-chantillon de X.
4.17. Une modlisation hirarchique.
Pour le champ Y = Y
i
, i S sur un sous-ensemble discret S muni dun
graphe de voisinage ( symtrique et sans boucle, on considre le modle hi-
rarchique suivant :
1. (Y
i
[X
i
), i S, sont des variables alatoires de Poisson conditionnellement
indpendantes de moyenne E(Y
i
[X
i
) = exp(U
i
+X
i
).
4.7 Simulation dun champ gaussien sur S R
d
151
2. U
i
N(0,
1
) sont indpendantes et X = X
i
, i S est un champ
auto-gaussien intrinsque de lois conditionnelles (modle CAR) :
(X
i
[X
i
) ^([i[
1
ji
X
j
, (
2
[i[)
1
),
o i est le voisinage de i.
3.
1
i
Gamma(a
i
, b
i
) sont indpendantes.
Proposer un algorithme de MCMC pour simuler la loi a posteriori de X
sachant Y = y.
5
Statistique des modles spatiaux
Nous prsentons dans ce chapitre les principales mthodes statistiques pour
les trois types de donnes prsents dans les premiers chapitres. A ct de m-
thodes statistiques gnrales applicables aux direntes structures (maximum
de vraisemblance, minimum de contraste, moindres carrs, estimation dun
modle linaire gnralis, mthodes de moments), on dispose de techniques
spciques chaque type de structure : nues variographiques en gostatis-
tique, pseudo-vraisemblance conditionnelle ou codage dun champ de Markov,
distances aux ppv et vraisemblance compose dun PP, etc. Sans prtendre
lexhaustivit, nous exposons les unes et les autres.
Pour des complments et dautres dveloppements, nous invitons le lecteur
consulter les livres cits en bibliographie. Nous recommandons galement la
consultation de laide en ligne du logiciel R, libre et disponible sur le site :
www.R-project.org ([178] et cf. Appendice D). Cette aide, bien documente,
est rgulirement mise jour et fournit des rfrences utiles.
Dautre part, lorsque la simulation dun modle est facile mettre en place,
les procdures de Monte Carlo (test, validation de modle) sont utiles si on
ne dispose pas de rsultats thoriques pour un problme donn.
Lorsque le nombre dobservations est grand, on distingue deux types
dasymptotique (Cressie [48]). Lasymptotique extensive (increasing domain
asymptotics) examine la situation o la taille de lobservation crot avec celle
du domaine dobservation. Cette situation est adapte chaque fois que les sites
ou les units dobservation (un canton, une station de mesure, une parcelle
agricole) sont spars ; tel est le cas en pidmiologie ou en gographie spa-
tiale, en modlisation environnementale, en cologie ou en agronomie. Lautre
asymptotique, dite intensive (inll asymptotics), examine la situation dob-
servations qui se densient dans un domaine S x et born. Cela peut tre le
cas en prospection minire (densication des carotages de prospection) ou en
analyse radiographique (augmentation de la rsolution de limage). Ces deux
domaines de recherche restent trs ouverts du fait dune plus grande tech-
nicit spatiale, de labsence de certains rsultats probabilistes (ergodicit,
faible dpendance, TCL) et/ou de la dicult vrier des hypothses utiles
154 5 Statistique des modles spatiaux
une dmonstration. Dautre part, le dveloppement important des mthodes
MCMC, justies dans bien des situations, ne pousse pas linvestissement
sur des sujets diciles. Nous ne parlerons ici que quelques rsultats relatifs
lasymptotique extensive et invitons le lecteur consulter le livre de Stein
[200] ou Zhang et Zimmerman [231] pour se faire une ide sur lasymptotique
intensive.
En statistique spatiale, les eets de bord sont plus importants quen sta-
tistique temporelle. Pour une srie chronologique (d = 1), le pourcentage de
points au bord du domaine S
N
= 1, 2, . . . , N est en N
1
, ce qui est sans
consquence sur le biais (la loi asymptotique) dun estimateur classique re-
normalis
N(
N
). Ceci nest plus vrai si d 2 : par exemple, pour
d = 2, le nombre relatif de points de bord du domaine S
N
= 1, 2, . . . , n
2
,
avec N = n
2
points, est en 1/
N, conduisant un biais pour lestimateur
renormalis. Une bonne solution propose par Tukey [216] consiste rabo-
ter (taper en anglais) les donnes au bord du domaine spatial (cf. 5.3.1) ;
lautre avantage du rabotage de donnes est daccorder moins dimportance
aux observations au bord du domaine, observations qui souvent scartent du
modle postul. Pour un PP spatial, une correction de leet de bord a t
propose par Ripley [184] (cf. 5.5.3).
Nous prsentons dabord les mthodes statistiques en gostatistique, puis
celles adaptes aux modles au second ordre, ensuite celles traitant des champs
de Markov et terminerons par la statistique des processus ponctuels. Trois ap-
pendices compltent ce chapitre : lappendice A expose les mthodes classiques
de simulation ; lappendice B examine lergodicit, la loi des grands nombres et
le thorme central limite pour un champ spatial ; enn lappendice C traite de
la mthode gnrale destimation par minimum de contraste ainsi que de ses
proprits asymptotiques ; y sont galement reports quelques dmonstrations
techniques de rsultats du Ch. 5.
5.1 Estimation en gostatistique
5.1.1 Analyse du nuage variographique
Soit X un champ rel intrinsque sur S R
d
, de moyenne constante, E(X
s
) =
et de variogramme :
2(h) = E(X
s+h
X
s
)
2
pour tout s S.
On suppose que X est observ en n sites O = s
1
, . . . , s
n
de S et on note
X(n) =
t
(X
s1
, . . . , X
sn
).
Supposons dans un premier temps que est isotropique. Le nuage vario-
graphique ou nue variographique est la donne des n(n 1)/2 points
^
c
= (|s
i
s
j
| , (X
si
X
sj
)
2
/2), i, j = 1, . . . , n et s
i
,= s
j
5.1 Estimation en gostatistique 155
du premier cadran de R
2
. Comme (X
si
X
sj
)
2
/2 estime sans biais (s
i
s
j
),
ce nuage est la bonne reprsentation de h 2(h). Remarquons que des
couples (s
i
, s
j
) de sites avec un grand carr (X
si
X
sj
)
2
peuvent apparatre
ct dautres couples la mme distance mais de petit carr (cf. Fig. 5.1-a).
Cela peut donner une indication des donnes aberrantes locales [175]. A ltat
brut, ce nuage ne permet donc pas de bien analyser les caractristiques du
variogramme, telles que la porte, le seuil ou encore la prsence dun eet de
ppite. Pour corriger cela, on eectue un lissage du nuage que lon superpose
au nuage de points ; ce lissage est obtenu soit par moyenne locale des carrs,
soit, plus gnralement, en utilisant un noyau de convolution.
0 100 200 300 400 500 600
0
5
0
0
0
1
0
0
0
0
1
5
0
0
0
2
0
0
0
0
2
5
0
0
0
3
0
0
0
0
0 100 200 300 400
0
5
0
0
0
1
0
0
0
0
1
5
0
0
0
0
45
90
135
(a) (b)
0 100 200 300 400
0
5
0
0
1
0
0
0
1
5
0
0
0
45
90
135
0 100 200 300 400
0
5
0
0
1
0
0
0
1
5
0
0
2
0
0
0
2
5
0
0
0
45
90
135
(c) (d)
Fig. 5.1. Analyse variographique des donnes pluie du Parana : (a) nuage variogra-
phique sur les donnes brutes et variogramme isotrope liss ; (b) variogrammes lisss
dans quatre directions ; (c) variogrammes lisss des rsidus dun modle ane ; (d)
variogrammes lisss des rsidus dun modle quadratique.
156 5 Statistique des modles spatiaux
A priori, le variogramme 2 nest pas isotropique et il est conseill de consi-
drer plusieurs orientations du vecteur h et dvaluer les nues variographiques
dans chaque direction partir des vecteurs s
i
s
j
proches de cette direction.
On dtectera ainsi empiriquement une ventuelle anisotropie du variogramme.
Un choix classique consiste retenir les 4 orientations cardinales S, SE, E et
NE avec une tolrance angulaire de 22.5 degr autour de chacune.
Exemple 5.1. Pluies dans lEtat du Parana (suite)
On reprend lexemple (1.8) des pluies X = (X
s
) dans lEtat du Parana
(Brsil). La nue variographique isotrope calcule sur les donnes brutes X
tant trs bruite, on eectue un lissage par noyau gaussien avec un para-
mtre de lissage (ici lcart type) gal 100 (cf. Fig. 5.1-a). Ce lissage, cal-
cul dans les 4 directions cardinales, rvle une claire anisotropie (cf. Fig.
5.1-b). Notons que cette anisotropie peut tre due une non-stationnarit en
moyenne : si par exemple X
s,t
= +as+
s,t
o est intrinsque et isotropique,
2
X
(s, 0) = a
2
s
2
+ 2
(s, 0) et 2
X
(0, t) = 2
(s, 0) ; ceci montre quil peut y
avoir confusion entre non-stationnarit au premier ordre et non-isotropie.
Lexamen des variogrammes dans les directions 0
et 45
, dallure quadra-
tique, laissent supposer quune tendance ane dans ces directions a t ou-
blie ; cette non-stationnarit semblant conrme par la Fig. 1.9, on propose
une surface de rponse ane, E(X
s
) = m(s) =
0
+
1
x+
2
y, s = (x, y) R
2
;
mais les rsidus estims par MCO restent anisotropiques (cf. Fig. 5.1-c). Pour
une surface de rponse quadratique, m(s) =
0
+
1
x+
2
y+
3
x
2
+
4
xy+
5
y
2
,
lexamen des nues variographiques inviterait retenir un modle de rsidus
stationnaire et isotrope proche dun bruit blanc (cf. Fig. 5.1-d).
5.1.2 Estimation empirique dun variogramme
Lestimateur empirique naturel de 2(h) est lestimateur des moments
(Matheron [152]) :
n
(h) =
1
#N(h)
(si,sj)N(h)
(X
si
X
sj
)
2
, h R
d
. (5.1)
Dans cette formule, N(h) est une classe approximante de couples (s
i
, s
j
)
distance h (h R
d
) pour une tolrance . En situation disotropie, on
prendra par exemple, pour r = |h| > 0 :
N(h) = (s
i
, s
j
) : r |s
i
s
j
| r +; i, j = 1, . . . , n.
Dans la pratique, on choisit destimer le variogramme 2() en un nombre
ni k despacements,
H = h
1
, h
2
, . . . , h
k
de telle sorte que chaque classe comporte au moins 30 couples de points [48] :
le choix de la famille despacements H doit bien couvrir le domaine de ()
5.1 Estimation en gostatistique 157
0 100 200 300 400 500 600
0
5
0
0
0
1
0
0
0
0
1
5
0
0
0
2
0
0
0
0
2
5
0
0
0
3
0
0
0
0
366
963
1192
1386
1387
1247
1072
881
657
500
306
164
31
500 550 600 650 700
1
0
0
1
5
0
2
0
0
2
5
0
3
0
0
+
*
*
2
2
(a) (b)
Fig. 5.2. (a) Nue variographique et espacements isotropiques pour les donnes de
pluies dans lEtat du Parana et eectifs des couples de points qui tombent dans
lespacement ; les () indiquent lestimation empirique du variogramme ; (b) sites
sj () tels que si sj V
,
(h, ) pour un site si (+), avec h = 109.15, = 0,
= 15.59, et = /8.
et rpondre cette contrainte deectifs (cf. Fig. 5.2-a). Pour lestimation
dun modle paramtrique (cf. 5.1.3), H devra galement rendre le paramtre
identiable. Plus gnralement, sans hypothse disotropie et pour le vecteur
h = r(cos , sin ) de direction dans R
2
, on prendra (cf. Fig. 5.2-b) :
N(h) = (s
i
, s
j
) : s
i
s
j
1
,
(h, ) ; i, j = 1, . . . , n,
1
,
(h) = v = u(cos , sin ) R
2
o [u r[ et [ [ .
Si X est stationnaire au second ordre, la covariance est estime empirique-
ment par
C
n
(h) =
1
#N(h)
si,sjN(h)
(X
si
X)(X
sj
X), h R
d
, (5.2)
o = X = n
1
n
i=1
X
si
estime sans biais la moyenne .
Un avantage de 2
n
(h) en comparaison de
C
n
(h) est de ne pas demander
lestimation pralable de la moyenne . De plus, sous hypothse de station-
narit intrinsque, 2
n
(h) estime sans biais de 2(h) l o un biais apparat
pour
C
n
(h).
La proposition suivante prcise la loi de 2
n
(h) si X est gaussien (sans
hypothse gaussienne, cf. Prop. 5.3), ce rsultat dcoulant des proprits
des formes quadratiques dun vecteur gaussien. En eet 2 (h) scrit comme
t
XA(h)X o A(h) est une matrice n n symtrique s.d.p. de coecients
A
si,sj
= 1/#N(h) si s
i
,= s
j
et A
si,si
= (#N(h) 1)/#N(h) sinon. La
158 5 Statistique des modles spatiaux
matrice A(h) tant de rang N(h), notons
i
(h) les N(h) valeurs propres
non-nulles de A(h). Puisque A(h)1 = 0, on peut supposer que = 0.
Proposition 5.1. Loi du variogramme empirique dun processus gaussien
Si X ^
n
(0, ), alors (h)
N(h)
i=1
i
(h)
2
i1
pour des
2
i.i.d. 1-ddl.
En particulier :
E( (h)) = Trace(A(h)) et V ar( (h)) = 2 TraceA(h)
2
.
Preuve. La preuve est classique :
1. Y =
1/2
X suit une loi ^
n
(0, I
n
) et (h) =
t
Y Y o =
t
1/2
A(h)
1/2
;
2. Si =
t
PDP est la dcomposition spectrale de (P orthogonale, D
matrice des valeurs propres (
i
) de ), alors
t
Y Y =
n
i=1
i
Z
2
i
o les
variables (Z
i
) sont i.i.d. gaussiennes rduites : en eet
t
Y Y =
t
ZDZ si
Z = PY et Z ^
n
(0, I
n
).
3. La proposition dcoule alors du fait que
t
1/2
A(h)
1/2
et A(h) ont les
mmes valeurs propres et que E(
2
i1
) = 1 et V ar(
2
i1
) = 2.
.
Lestimation (h) tant peu robuste aux valeurs leves de X
si
X
sj
,
Cressie et Hawkins [49; 48, p. 74] proposent lestimateur robusti :
n
(h) =
_
0.457 +
0.494
#N(h)
_
1
1
#N(h)
(si,sj)N(h)
[X
si
X
sj
[
1/2
4
.
[X
si
X
sj
[
1/2
, desprance proportionnelle (s
i
s
j
)
1/4
, est en eet moins
sensible aux grandes valeurs de [X
si
X
sj
[ que ne lest (X
si
X
sj
)
2
et le
dnominateur est un facteur qui dbiaise, pour #N(h) grand, 2
n
. Dautre
part, Cressie et Hawkins montrent que lerreur quadratique moyenne de
n
est moindre que celle de
n
.
5.1.3 Estimation paramtrique dun modle de variogramme
Les modles de variogramme (; ) prsents au chapitre 1 (cf. 1.3.3) d-
pendent dun paramtre R
p
gnralement inconnu. Nous allons prsenter
deux mthodes destimation de , les moindres carrs et le maximum de vrai-
semblance.
Estimation par moindres carrs
Lestimation de par moindres carrs ordinaires (MCO) est une valeur
MCO
= argmin
i=1
(
n
(h
i
) (h
i
; ))
2
, (5.3)
5.1 Estimation en gostatistique 159
o k est le nombre de classes retenues pour lestimation empirique
n
de aux
cartements H = h
1
, h
2
, . . . , h
k
. Dans cette expression, on peut remplacer
n
(h
i
) par lestimation robustie
n
(h
i
).
Comme pour une rgression, la mthode des MCO nest en gnral pas
ecace car les
n
(h
i
) ne sont ni indpendants ni de mme variances. On
pourra lui prfrer lestimation par moindres carrs gnralises (MCG) :
MCG
= argmin
t
(
n
())Cov
(
n
)
1
(
n
()), (5.4)
o
n
=
t
(
n
(h
1
), . . . ,
n
(h
k
)) et () =
t
((h
1
, ), . . . , (h
k
, )). Le calcul
de Cov
(
n
) se rvlant souvent dicile, la mthode des moindres carrs
pondrs (MCP) est un compromis entre les MCO et les MCG, les carrs
tant pondrs par les variances des
n
(h
i
). Par exemple, dans le cas gaussien,
puisque var
(
n
(h
i
)) 2
2
(h
i
, )/#N(h
i
), on retiendra :
MCP
= argmin
i=1
#N(h
i
)
2
(h
i
; )
(
n
(h
i
) (h
i
; ))
2
. (5.5)
Des tudes par simulations [232] montrent que les performances de lestima-
teur par MCP restent relativement bonnes en comparaison des MCG.
Les trois mthodes prcdentes relvent dun mme principe, lestimation
par moindres carrs (EMC) : pour V
n
() une matrice k k symtrique, d.p.,
de forme paramtrique connue, on veut minimiser la distance U
n
() entre
() et
n
:
EMC
= argmin
U
n
() o U
n
() =
t
(
n
())V
n
()(
n
()). (5.6)
La mthode EMC est un cas particulier destimation par minimum de contraste
(cf. Appendice C). Comme lindique la proposition suivante, la consistance
(resp. la normalit asymptotique) de
n
=
EMC
dcoule de la consistance
(resp. la normalit asymptotique) de lestimateur empirique
n
. Notons :
() =
()
la matrice k p des p drives du vecteur () R
k
et posons :
(V-1) Pour tout
1
,=
2
de ,
k
i=1
(2(h
i
,
1
) 2(h
i
,
2
))
2
> 0.
(V-2) est intrieur et () est de classe (
1
.
(V-3) V
n
() V () en P
-probabilit o V est symtrique, d.p., V ()
tant de classe (
1
.
Proposition 5.2. Convergence et normalit asymptotique de lEMC (Lahiri
et al. [138]).
Supposons vries les conditions (V13) et notons la vraie valeur in-
connue du paramtre.
160 5 Statistique des modles spatiaux
1. Si
n
() P
-p.s., alors
n
p.s..
2. Supposons de plus que, pour une suite (a
n
) tendant vers linni,
a
n
(
n
())
loi
^
k
(0, ()) (5.7)
o () est d.p. et que la matrice () est de rang plein p. Alors :
a
n
(
n
)
loi
^
p
(0, ())
o
() = B()
t
()V ()()V ()()
t
B()
avec B() = (
t
()V ()())
1
.
Commentaires :
1. Ltude de la convergence (5.7) fait lobjet du paragraphe suivant dans le
contexte plus gnral dun modle avec une tendance linaire.
2. La condition (V-1) est une condition didentiabilit paramtrique de mo-
dle : si
1
,=
2
, les k espacements H = h
1
, h
2
, . . . , h
k
permettent de
distinguer les deux variogrammes (,
1
) et (,
2
). Cette condition n-
cessite quil y ait au moins p vecteurs h
i
didentication : k p.
3. La preuve de la consistance de
n
utilise la continuit des fonctions
() et V () ; la direntiabilit est ncessaire pour tablir
la normalit asymptotique de
n
.
4. Pour la mthode des MCO (V () Id
k
) et si on peut choisir k = p,
() =
1
()()
t
(
1
()).
5. La mthode est ecace en prenant pour V
n
() linverse de la matrice de
variance de
n
. Cette matrice tant dicile obtenir, Lee et Lahiri [144]
proposent de lestimer par sous-chantillonnage, leur procdure restant
asymptotiquement ecace.
6. Ce rsultat permet de construire un test de sous-hypothse sur le para-
mtre .
5.1.4 Estimation du variogramme en prsence dune tendance
Reste voir sous quelles conditions lestimateur empirique
n
est asymptoti-
quement normal satisfaisant (5.7). Nous prsentons ici un rsultat de Lahiri
et al. [138] qui assure cette proprit dans le contexte plus gnral dun modle
linaire :
X
s
=
t
z
s
+
s
, R
p
(5.8)
avec un rsidu champ intrinsque centr,
E(
s+h
s
)
2
= 2(h, ), R
q
.
5.1 Estimation en gostatistique 161
Ce modle, de paramtre (, ) R
p+q
, peut tre approch de deux faons
direntes.
Si cest le paramtre moyen quon privilgie, comme cest le cas en co-
nomtrie, on lira (5.8) comme une rgression spatiale ; dans ce cas, est un
paramtre auxiliaire quil faut pralablement estimer (par
) an destimer
ecacement par la mthode des MCG pour la variance estime V ar
() (cf.
5.3.4).
Si cest le paramtre de dpendance que lon privilgie, comme en analyse
spatiale, sera un paramtre auxiliaire, estim par exemple par les MCO. Dans
ce cas, la mthode destimation du variogramme est la suivante :
1. On estime par
par une mthode ne ncessitant pas la connaissance de
, par exemple par les MCO.
2. On calcule ensuite les rsidus estims
s
= X
s
t
z
s
.
3. On estime enn le variogramme empirique de sur H par (5.1).
Posons alors le cadre de lasymptotique considre. Soit D
1
R
d
un ouvert
de mesure de Lebesgue d
1
> 0, contenant lorigine et bord rgulier (D
1
est la runion nie de surfaces rectiables de mesures nies, par exemple
D
1
=] 1/2, 1/2]
d
, ou D
1
= B(0, r), r > 0). On suppose que le domaine
dobservations est :
D
n
= (nD
1
) Z
d
.
Dans ce cas, d
n
= D
n
d
1
n
d
et, du fait de la gomtrie de D
1
, (D
n
) =
o(D
n
). Posons alors les conditions suivantes :
(VE-1) > 0 t.q. E [
s
[
4+
< ; X est -mlangeant (cf. B.2), vriant :
C < et >
(4 +)d
tels que, k, l, m :
k,l
(m) Cm
;
(VE-2) sup
h1
sup|z
s+h
z
s
| : s R
d
< ;
(VE-3) |
n
| = o
P
(d
1/4
n
), o
n
est un estimateur de .
Proposition 5.3. Convergence gaussienne du variogramme empirique [138].
Sous les conditions (VE-13) :
d
1/2
n
(
n
())
loi
^
k
(0, ())
o
l,r
() =
iZ
d
cov
([
h
l
0
]
2
, [
i+hr
i
]
2
), l, r = 1, . . . , k.
Commentaires :
1. (VE-1) assurent la normalit si X est de moyenne constante. Ceci est
une consquence du TCL pour le champ des carrs [
i+hr
i
]
2
qui
est mlangeant (cf. B.3 pour ce rsultat et des exemples de champs m-
langeants). Si X est un champ gaussien stationnaire dont la covariance
dcrot exponentiellement, (VE-1) est satisfaite.
162 5 Statistique des modles spatiaux
2. (VE-2) et (VE-3) assurent que, si
n
une vitesse susante, le r-
sultat prcdent se maintient en travaillant avec les rsidus estims. Cette
condition est rapprocher dun rsultat de Dzhaparidze ([75], cf. 5.3.4)
montrant lecacit de lestimateur
1
obtenu au premier pas de lalgo-
rithme de Newton-Raphson pour la rsolution dun systme dquations
F(
) = 0 condition que lestimateur initial
0
soit consistant une
vitesse susante.
3. Des conditions standards sur la suite des rgresseurs et sur le modle des
rsidus permettent de contrler la variance de lestimateur des MCO de
(cf. Prop. 5.7) et donc de vrier la condition (VE-3).
4. Si on ajoute (V) aux conditions (VE), on obtient la normalit asympto-
tique pour lEMC
(5.8).
5. Lahiri et al. [138] tudient un contexte dasymptotique mixte o, ct
de lactuelle asymptotique extensive, on densie les points dans D
n
. Par
exemple, pour des rsolutions spatiales de plus en plus nes au pas
h
n
= m
1
n
dans chaque direction, m
n
N
et m
n
, le domaine
dobservation est :
D
n
= nD
1
Z/m
n
d
.
Si le nombre de points dobservation se trouve multipli par le facteur
(m
n
)
d
, la vitesse reste inchange par rapport lasymptotique extensive
pure, toujours en
d
n
_
(nD
1
), la covariance asymptotique
()
valant :
l,r
() =
_
R
d
cov
([
h
l
0
]
2
, [
s+hr
s
]
2
)ds, l, r = 1, . . . , k.
On retrouve l une situation classique en statistique des diusions (d = 1)
selon que lon observe la diusion de faon discrte (D
n
= 1, 2, . . . , n),
ou de faon de plus en plus ne au pas m
1
n
(D
n
= k/m
n
, k =
1, . . . , nm
n
), ou encore de faon continue sur D
n
= [1, n], n :
chaque fois, la vitesse est en
n, seul le facteur modulant cette vitesse
variant dun schma lautre.
Maximum de vraisemblance
Si X est un vecteur gaussien de moyenne et de covariance V ar(X) = (),
la log-vraisemblance vaut :
l
n
() =
1
2
_
log [()[ +
t
(X )
1
()(X )
_
. (5.9)
Pour maximiser (5.9), on itre le calcul du dterminant [()[ et de la cova-
riance inverse
1
(), ce qui exige O(n
3
) oprations [149]. Si
est lestimation
du MV de , celle du variogramme est 2(h,
).
Les proprits asymptotiques de lestimateur du maximum de vraisem-
blance dans le cas gaussien sont dcrites au 5.3.4 qui traite de lestimation
dune rgression spatiale gaussienne.
5.1 Estimation en gostatistique 163
5.1.5 Validation dun modle de variogramme
Le choix dun modle de variogramme dans une famille de modles param-
triques peut se faire en utilisant le principe de parcimonie de Akaike pour le
contraste des MC pnaliss [4; 114] (cf. C.3). Une fois un modle / retenu,
reste le valider. Une premire faon consiste plonger / dans un modle
dominant /
max
et tester / /
max
. Dcrivons deux autres procdures
alternatives non-paramtriques.
La validation croise
Le principe de la validation croise est dliminer tour de rle chaque obser-
vation et de la prvoir laide des autres observations en utilisant le krigeage
(cf. 1.9) sans restimer le modle de variogramme : en chaque site, on dispose
de la valeur observe X
si
et dune valeur prvue
X
si
. La validation utilise le
critre de lerreur quadratique normalise moyenne,
EQNM =
1
n
n
i=1
(X
si
X
si
)
2
2
si
o
2
si
est la variance de krigeage. Si le modle de variogramme est valide et
bien estim, on obtiendra une valeur de lEQNM proche de 1. Si, en premire
approximation, on suppose que les erreurs normalises (X
si
X
si
)/
si
sont
normales rduites indpendantes, on validera le modle si, notant q(n, ) le
-quantile dun
2
n
:
q(n, /2) nEQNM q(n, 1 /2).
Lanalyse graphique des erreurs renormalises est utile pour valider un
modle. Une rpartition spatiale homogne des erreurs > 0 et des erreurs < 0
est une indication de bonne adquation de modle (cf. Fig. 5.5-a). Par contre,
la Fig. 5.5-b indique quil y a hetroscdasticit des rsidus.
Validation par mthode de Monte Carlo : bootstrap paramtrique
Soit
un estimateur du paramtre du variogramme (, ) valider. On
ralise m simulations (X
(j)
, j = 1, . . . , m) i.i.d. dun champ intrinsque sur
S = s
1
, s
2
, . . . , s
n
de variogramme (;
). Pour chaque simulation j, on
calcule les estimations empiriques
(j)
n
(h
i
), i = 1, . . . , k sur H ainsi que
leurs enveloppes infrieures
inf
(h
i
) = min
j=1,...,m
(j)
n
(h
i
) et suprieures
sup
(h
i
) = max
j=1,...,m
(j)
n
(h
i
), i = 1, . . . , k. Accordant le mme poids
chaque simulation, ces deux enveloppes dnissent un intervalle de conance
approximatif empirique de niveau 1 2/(m+ 1) :
P(
(j)
n
(h
i
) <
inf
(h
i
)) = P(
(j)
n
(h
i
) >
sup
(h
i
))
1
m+ 1
.
164 5 Statistique des modles spatiaux
On reprsente alors graphiquement les fonctions h
i
inf
(h
i
) et h
i
sup
(h
i
), i = 1, . . . , k : si les estimations empiriques initiales
n
(h
i
) sont dans
la bande de conance [
inf
(h
i
),
sup
(h
i
)], i = 1, . . . , k, on conclut raison-
nablement que X est un processus intrinsque de variogramme (, ) (cf. la
Fig. 5.4-b) ; sinon, on rejete le modle (, ), lexamen des causes de ce rejet
pouvant servir proposer un modle alternatif. Signalons cependant que cette
procdure est conservative, favorisant le maintien de lhypothse valider.
Exemple 5.2. Nuage radioactif de Tchernobyl et pluie journalire en Suisse
On dispose des cumuls pluviomtriques journaliers provenant du rseau
mtorologique suisse relevs le 8 mai 1986, jour o le nuage de Chernobyl
se dplaait au-dessus de lEurope. La pluie journalire tant un bon indi-
cateur des eets des retombes radioactives, ces donnes permettaient dva-
luer les risques de contamination la suite de la catastrophe de Chernobyl.
Ces donnes ont fait lobjet dun concours o les chercheurs taient invits
proposer leurs modles et leurs mthodes de prvision : 100 donnes tant
disponibles (donnes sic.100 dans le package geoR) sur les 467 du rseau
Suisse (cf. Fig. 5.3), il tait demand de prvoir au mieux les 367 donnes non-
disponibles (caches mais connues) pour le critre de lcart quadratique [70].
Si les estimateurs (5.1) et (5.2) ne garantissent pas la condition c.d.n. que
doit satisfaire un variogramme (cf. Prop. 1.2), ils permettent nanmoins des-
timer un modle paramtrique (1.3.3) : le Tableau 5.1 prsente les estimations
obtenues en utilisant geoR pour le variogramme de Matrn trois paramtres
(a,
2
, ) (cf. 1.3.3).
La Fig. 5.4-a compare les semi-variogrammes obtenus par MCO, MCP et
MV gaussien. LEQNM (cf. Tableau 5.1) obtenue par validation croise pour
0
X Coord
Y
C
o
o
r
d
50 100 150 200 250 300 350
2
5
0
2
0
0
1
5
0
1
0
0
5
0
5
0
0
(a)
50 100 150 200
0
5
0
0
0
1
0
0
0
0
1
5
0
0
0
2
0
0
0
0
h
s
e
m
i
v
a
r
i
o
g
r
a
m
m
e
classique
robuste
(a) (b)
Fig. 5.3. (a) Donnes de pluie pour 100 stations mtorologiques suisses : les dimen-
sions des symboles sont proportionnelles lintensit de la pluie ; (b) les 2 estimations
non-paramtriques du semi-variogramme pour 13 classes de distance.
5.1 Estimation en gostatistique 165
Tableau 5.1. Estimations paramtriques, MCO, MCP et MV du semi-variogramme
de Matrn pour les donnes de pluie en Suisse et EQNM de validation croise.
a
2
EQNM
MCO 17.20 15135.53 1.21 1.37
MCP 18.19 15000.57 1.00 1.01
MV 13.40 13664.45 1.31 1.09
50 100 150 200
0
5
0
0
0
1
0
0
0
0
1
5
0
0
0
2
0
0
0
0
h
s
e
m
i
v
a
r
i
o
g
r
a
m
m
e
MCO
MCP
MV
0 50 100 150 200
0
5
0
0
0
1
0
0
0
0
1
5
0
0
0
2
0
0
0
0
2
5
0
0
0
3
0
0
0
0
3
5
0
0
0
distance
s
e
m
i
v
a
r
i
a
n
c
e
(a) (b)
Fig. 5.4. (a) Les 3 estimations paramtriques du semi-variogramme ; (b) estimations
empiriques de compares aux enveloppes infrieure et suprieure (en pointills)
obtenues partir de 40 simulations du modle de Matrn estim (paramtres a =
18.19,
2
= 15000.57 et = 1.0).
lestimateur des MCP conduit valider le modle de Matrn et lestimation
par MCP. Cette validation est conrme par la Fig. 5.4-b qui montre que
les 13 estimations empiriques de sont toutes dans la bande de conance
empirique 95% obtenue partir de 40 simulations du modle de Matrn
estim. Les gures 5.5-a et 5.5-b qui illustrent le comportement des rsidus
estims valident galement ce modle.
Finalement la Fig. 5.6 donne la carte de prvision (a) de pluie par krigeage
sur tout le territoire et son cart type (b), lun et lautre calculs partir du
modle estim.
Exemple 5.3. Pluies dans lEtat du Parana (suite)
Continuons lexamen de la modlisation des pluies dans lEtat du Parana.
Lanalyse variographique eectue dans lexemple 5.1 envisage soit la prsence
dune surface de rponse ane avec variogramme anisotropique, soit une sur-
face de rponse quadratique et un variogramme bruit blanc. On propose ici
destimer et de choisir entre trois modles :
1. Modle A : m(s) =
0
+
1
x+
2
y et une covariance isotropique exponen-
tielle avec un eet ppitique,
C(h) =
2
exp(|h|/) +
2
1
0
(h).
166 5 Statistique des modles spatiaux
50 100 150 200 250 300
0
5
0
1
0
0
1
5
0
2
0
0
2
5
0
Coord X
C
o
o
r
d
Y
x
x
+
+
x +
x
x
+
+
+
+
+
x
x
x
x
x
+ x
x
+
+
x
+
+
x
x
+
x
x
x
x
+
x
x
x
+
+
+
+
x
x
+
x
+
+
x
x
x
x
x
+
x
x
+
x
x
x
x
x
x x
+
x
x
x
+
+
x
x
+
x
+
x
x
+
x
+
+
x
x
+
x
+
+
+
+
x
x
+
x
+
x
+
x
+
x
+
+
100 200 300 400
2
0
2
4
predicted
s
t
d
r
e
s
i
d
u
a
l
s
(a) (b)
Fig. 5.5. Donnes de pluies suisses : (a) rpartition spatiale des erreurs normalises
positives (+) et ngatives (x) ; (b) graphique des erreurs normalises en fonction des
valeurs prdites.
Fig. 5.6. Krigeage des donnes de pluies suisses (a) prvision
Xs et (b) cart type
de lerreur de prdiction.
2. Modle B : m(s) =
0
+
1
x +
2
y et une covariance exponentielle avec
un eet ppitique et une anisotropie gomtrique,
C(h) =
2
exp(|A(, )h|/) +
2
1
0
(h),
o A(, ) est la rotation autour de lorigine de R
2
dangle suivie de
lhomothtie de rapport 0 1/ 1 sur le nouvel axe des y.
3. Modle C : m(s) =
0
+
1
x +
2
y +
3
x
2
+
4
xy +
5
y
2
et
C(h) =
2
exp(|h|/) +
2
1
0
(h).
5.1 Estimation en gostatistique 167
Tableau 5.2. Rsultats de lestimation par MV gaussien pour les donnes de pluies
de lEtat du Parana. lv est la valeur du logarithme de la vraisemblance gaussienne
et m est le nombre de paramtres.
Modle lv m AIC EQNM
A -663.9 6 1340 0.98
B -660.0 8 1336 1.14
C -660.2 9 1338 0.99
84 82 80 78 76
3
6
3
8
4
0
4
2
4
4
longitude
l
a
t
i
t
u
d
e
Temps
P
P
B
0 200 400 600 800
2
0
4
0
6
0
8
0
(a) (b)
Fig. 5.7. Donnes dozone pour 106 stations de trois tats des Etats-Unis : (a)
rpartition spatiale des stations ; les dimensions des symboles sont proportionnelles
lintensit moyenne sur lanne ; (b) volution temporelle de la moyenne sur les
106 stations et composante priodique estime.
Notons que A est un sous-modle de B et de C. Notant lv la log-
vraisemblance gaussienne des observations et m le nombre de paramtres du
modle, on obtient les rsultats du Tableau (5.2). Formellement (c--d en ap-
pliquant le rsultat classique du test de rapport de vraisemblance), le modle
B est prfrable A alors que A et C ne sont pas signicativement dirents.
Le critre AIC conduit au choix du modle anisotropique B l o le critre de
lEQNM (qui mesure lcart quadratique moyen de prdiction (par krigeage)
des donnes aux donnes relles) retient le modle C : les modles B et C sont
des concurrents.
Exemple 5.4. Analyse de donnes spatio-temporelles de niveaux dozone
Les donnes tudies ici sont les maximums des moyennes horaires sur
huit heures conscutives des niveaux dozone mesurs dans 106 stations des
tats de lOhio, de la Pensylvanie et de la Virginie occidentale (Etats-Unis, cf.
Fig. 5.7-a) du 1
er
mai au 31 octobre pour les annes 19951999, ce qui fait 184
observations par site par anne. Les donnes originales, disponibles ladresse
http ://www.image.ucar.edu/GSP/Data/O3.shtml, ont t recentres aprs
168 5 Statistique des modles spatiaux
un ajustement pralable par MCO pour chaque station s sur une composante
saisonnire commune toutes les stations (cf. Fig. 5.7-b),
s,t
=
s
+
10
j=1
[
j
cos(2jt/184) +
j
sin(2jt/184)].
On se restreint ici lanalyse des donnes de mai septembre de la dernire
anne, retenant le mois doctobre pour la prvision et la validation de modle.
Subsistent, hors donnes manquantes, 15,133 observations.
La spcication dun modle spatio-temporel commence par linspection
visuelle de lestimation empirique du variogramme spatio-temporel 2(h, u) =
V ar(X
s+h,t+u
X
s,t
), (h, u) R
2
R. Dans le cas dun processus stationnaire
au second ordre, (h, u) = (C(0, 0)C(h, u)). Lestimateur des moments pour
un processus stationnaire et isotropique est :
2
n
(h, u) =
1
#N(h, u)
(si,sj;ti,tj)N(h,u)
(X
si,ti
X
sj,tj
)
2
, h R
d
avec
N(h, u) = (s
i
, s
j
; t
i
, t
j
) : |h|
S
|s
i
s
j
| |h| +
S
,
[u[
T
[t
i
t
j
[ [u[ +
T
; i, j = 1, . . . , n.
On reprsente alors graphiquement (cf. Fig. 5.8) les estimations empiriques
de pour dirents choix despacements h
k
, u
l
. La Fig. 5.8-a montre que
la corrlation spatiale instantane dcrot avec la distance tout comme la
corrlation temporelle en un mme site. On considre alors quatre modles
pour la covariance spatio-temporelle C(h, u), souples dans leur utilisation et
cohrents avec le comportement des variogrammes empiriques :
Modle A :
C(h, u) =
2
(1 +[u/[
a
+|h/|
b
)
3/2
,
avec 0 < a, b 2, , > 0 (cest un cas particulier du modle (1.18)).
Modle B :
C(h, u) =
2
(1 +[u/[
a
)
3/2
exp
_
|h/|
(1 +[u/[
a
)
b/2
_
,
avec 0 < a 2, 0 b 1 (cest le modle (1.17) de lexemple 1.7).
Modle C : le modle B avec b = 0 (C est donc un modle sparable).
Modle D :
C(h, u) =
2
(1 +[u/[
a
)
b
M
c
_
|h/|
(1 +[u/[
a
)
b/2
_
,
avec 0 < a 2, 0 b 1, o M
c
(v) = (2
b1
(c))
1
v
c
/
c
(v), c > 0 est le
modle de Matrn. Le modle D est un modle de la classe (1.16).
5.1 Estimation en gostatistique 169
0 200 400 600 800
0
1
0
0
2
0
0
3
0
0
4
0
0
distance
S
e
m
i
v
a
r
i
o
g
r
a
m
u = 0
A
B
C
D
0 2 4 6 8 10
0
1
0
0
2
0
0
3
0
0
4
0
0
lag
S
e
m
i
v
a
r
i
o
g
r
a
m
h = 0
A
B
C
D
(a) (b)
0 200 400 600 800
0
1
0
0
2
0
0
3
0
0
4
0
0
distance
S
e
m
i
v
a
r
i
o
g
r
a
m
u = 1
A
B
C
D
0 200 400 600 800
0
1
0
0
2
0
0
3
0
0
4
0
0
distance
S
e
m
i
v
a
r
i
o
g
r
a
m
u = 2
A
B
C
D
(c) (d)
Fig. 5.8. Estimations empiriques () et paramtriques du semi-variogramme spatio-
temporel des donnes de niveau dozone pour direntes classes de distance et de
modles : (a) n(h
k
, 0) ; (b) n(0, u
l
) ; (c) n(h
k
, 1) ; (d) n(h
k
, 2).
Les paramtres sont estims par MCP en minimisant le critre :
W() =
mt
k=1
ms
l=1
[N(h
k
, u
l
)[
(h
k
, u
l
; )
2
( (h
k
, u
l
) (h
k
, u
l
; ))
2
, (5.10)
o m
s
(resp. m
t
) est le nombre despacements spatiaux (resp. temporels)
retenus pour lajustement. Cette mthode est la plus utilise car lvaluation
dune vraisemblance gaussienne (5.9) est coteuse (O(N
3
) oprations pour N
observations ; signalons cependant quune faon de contourner cette dicult
est dapproximer la vraisemblance [126; 201; 79]).
Deux approches sont considres pour choisir un modle. La premire uti-
lise simplement W(
), le critre (5.10) des MCP. La deuxime est base sur la
170 5 Statistique des modles spatiaux
Tableau 5.3. Estimations paramtriques du semi-variogramme par la mthode des
MCP pour les donnes dozone.
Modle a
b c
2
W(
) EQM
A 0.67 0.32 461.87 1920.20 11.58 134379.3 161.46
B 2.00 0.21 310.15 347.13 1.34 200141.4 151.84
C 2.00 309.70 347.30 1.36 200303.0 152.03
D 1.69 0.23 0.29 392.69 1507.78 0.77 110462.1 155.61
qualit de prvision que permet le modle : laide du krigeage simple pour
le mois doctobre 1999, on calcule la prvision x
s,t
dun jour pour chaque
station en utilisant les donnes des trois jours prcdents ; la qualit de la
prvision sur les 3075 observations disponibles est value par l erreur qua-
dratique moyenne EQM =
s,t
(x
s,t
x
s,t
)
2
/3075. Le Tableau 5.3 donne les
rsultats : les modles non-sparables sont meilleurs, D en particulier. Pour
le critre de prdiction, le meilleur modle est C.
5.2 Autocorrlation sur un rseau spatial
On supposera dans ce paragraphe que X est un champ rel dni sur un
rseau discret S R
d
, non-ncessairement rgulier, S tant muni dun graphe
dinuence (a priori orient), (i, j) signiant que j a une inuence sur
i, j ,= i.
Dautre part, on se donne une matrice de poids positifs borns W = w
ij
,
(i, j) quantiant les degrs dinuence de j sur i, avec, pour tout i,
w
ii
= 0 et w
ij
= 0 si (i, j) / . Le choix de W, laiss lexpert, est une tape
importante de la modlisation de R) qui dpend du problme considr. Si i
reprsente une rgion gographique (un canton), Cli et Ord [45] proposent
par exemple de faire dpendre w
ij
de la distance euclidienne d(i, j) = |i j|,
du pourcentage f
i(j)
de la frontire de i partage avec j, de lintensit c
i,j
des rseaux de communication entre i et j si on est en zone urbaine, etc. Par
exemple,
w
ij
= f
b
i(j)
d(i, j)
a
avec a et b > 0 donne des poids w
ij
importants pour des cantons voisins,
dautant plus que la part de frontire de i commune j est importante. W
est la matrice de contigut du graphe si w
ij
= 1 pour (i, j) et 0
sinon. La matrice de contigut normalise est associe aux poids normaliss
w
ij
= w
ij
/
ki
w
ik
.
On distingue classiquement deux indices de mesure de dpendance spatiale
globale sur le rseau (S, ) : lindice de Moran value une corrlation spatiale
et lindice de Geary un variogramme spatial.
5.2 Autocorrlation sur un rseau spatial 171
5.2.1 Lindice de Moran
Soit X un champ rel du second ordre observ sur une partie D
n
S de
cardinal n. Supposons dans un premier temps que X est centr et notons
2
i
= V ar(X
i
). Soit W une matrice nn de poids connus : une W-mesure de
lautocovariance spatiale globale est,
C
n
=
i,jDn
w
i,j
X
i
X
j
.
Cette autocovariance doit tre normalise pour fournir une autocorrlation.
Sous lhypothse (H
0
) dindpendance spatiale des X
i
, il est facile de voir
que :
V ar(C
n
) =
i,jDn
(w
2
ij
+w
ij
w
ji
)
2
i
2
j
.
Ainsi, sous (H
0
), I
n
= V ar(C
n
)
1/2
C
n
est une variable centre rduite. Si
les
2
i
sont connus, un test asymptotique de (H
0
) sobtiendra si on dispose
dun thorme central limite (TCL) pour C
n
. Si les variances sont connues
un facteur multiplicatif prs,
2
i
= a
i
2
, a
i
> 0 connus, on estimera
2
par
2
=
1
n
iDn
X
2
i
/a
i
et on considrera lindice C
n
renormalis par son cart
type estim.
Lindice de Moran est la gnralisation de I
n
au cas o X est de moyenne
et de variance constantes mais inconnues, E(X
i
) = et V ar(X
i
) =
2
. Ces
paramtres tant estims respectivement par X = n
1
iDn
X
i
et
2
=
n
1
iDn
(X
i
X)
2
, lindice de Moran est :
I
M
n
=
n
i,jDn
w
ij
(X
i
X)(X
j
X)
s
0,n
iDn
(X
i
X)
2
, (5.11)
o s
0n
=
i,jDn
w
ij
. Posant s
1n
=
i,jDn
(w
2
ij
+w
ij
w
ji
), on a
I
M
n
=
s
1/2
1n
s
0n
V ar(C
n
)
1/2
C
n
=
s
1/2
1n
s
0n
I
n
.
Puisque s
0n
et s
1n
sont de lordre n, et que, sous (H
0
), E(C
n
) = 0 et
2
Pr
2
, on a, sous (H
0
) :
E(I
M
n
) = o(1) et V ar(I
M
n
) =
s
1n
s
2
0n
(1 +o(1)).
Mme sil ressemble un coecient de corrlation, lindice I
M
n
peut sortir
de lintervalle [1, +1] (cf. Ex. 5.2). I
M
n
est dautant plus grand que des valeurs
semblables apparaissent en des sites voisins, dautant plus petit que des valeurs
dissemblables apparaissent en des sites voisins. Dans le premier cas, on parle
dagrgation ou de coopration spatiale, dans le deuxime de rpulsion ou de
comptition spatiale. Le cas dobservations indpendantes correspond une
valeur de I
M
n
proche de 0.
Signalons que lindice de Moran peut galement tre construit pour des
donnes binaires ou pour des donnes ordinales [45].
172 5 Statistique des modles spatiaux
Indice de Moran distance d.
Supposons que W est la matrice de contiguit spatiale dun graphe ,
w
ij
= 1 si (i, j) , w
ij
= 0 sinon.
Pour d 1 entier, on dira que j est d-voisin de i sil existe une suite i
1
= i,
i
2
, . . ., i
d
= j telle que w
i
l
,i
l+1
,= 0 pour l = 1, . . . , d 1 et que ce chemin
est de longueur minimum. Ainsi, i
2
est voisin de i, i
3
de i
2
, . . . et enn j
est voisin de i
d1
. A cette relation est associe le graphe de voisinage
(d)
et
sa matrice de contigut W
(d)
distance d ; relativement W
(d)
, on dnit
les indices de Moran I
M
(d) distance d 1 de la mme faon quen (5.11).
Notons que W
(d)
W
d
o M
ij
= 0 (resp. 1) si M
ij
= 0 (resp. M
ij
,= 0).
Pour tester lhypothse dindpendance spatiale (H
0
), on aura recours soit
un test asymptotique soit un test de permutation.
5.2.2 Test asymptotique dindpendance spatiale
Supposons que S est un ensemble inni de sites spars par une distance
minimum > 0. Soit (D
n
) une suite strictement croissante de sous-ensembles
nis de S R
d
, W une matrice de poids borns connus sur le graphe S
2
de porte R voisinages de tailles uniformment bornes,
W = (w
ij
, i, j S) avec w
ii
= 0 et w
ij
= 0 si |i j| > R,
M < t.q. i, j : [w
ij
[ M et i M.
Le rsultat de normalit asymptotique suivant nexige pas que X soit gaussien.
Proposition 5.4. Normalit de lindice de Moran sous (H
0
)
Supposons que :
> 0 t.q. sup
iS
E([X
i
[
4+2
) < et liminf
n
s
1n
n
> 0.
Alors, sous lhypothse (H
0
) dindpendance spatiale, lindice de Moran est
asymptotiquement gaussien :
s
0n
s
1n
I
M
n
loi
^(0, 1).
Dmonstration : Montrons ce rsultat dans le contexte simpli o les va-
riables X
i
sont centres. Il sut de prouver la normalit asymptotique de
C
n
. Or :
C
n
=
Sn
Z
i
, o Z
i
= X
i
V
i
et V
i
=
j
w
ij
X
j
et
S
n
= i D
n
t.q. i D
n
. Mais, sous (H
0
), les variables Z
i
= X
i
V
i
sont
2R-dpendantes, c--d indpendantes ds que |i j| > 2R. Dautre part,
leurs moments dordre 2 + sont uniformment borns. Ainsi Z satisfait les
conditions dun TCL pour champ mlangeant (cf. B.3) : sous (H
0
), I
n
est
asymptotiquement gaussien.
.
5.2 Autocorrlation sur un rseau spatial 173
Calcul exact de lesprance et de la variance de I
M
n
si X est gaussien
Si les X
i
sont i.i.d. ^(,
2
), le rsultat prcdent peut tre prcis car on sait
alors calculer les moments exacts de I
M
n
. On a, sous (H
0
) et sous hypothse
gaussienne [45] :
E(I
M
n
) =
1
n 1
et V ar(I
M
n
) =
n
2
s
1n
ns
2n
+ 3s
2
0n
(n
2
1)s
2
0n
1
(n 1)
2
,
o s
2n
=
iDn
(w
i
+w
i
)
2
, w
i
=
iDn
w
ij
et w
j
=
jDn
w
ij
. Le calcul
de ces deux moments repose sur le rsultat suivant de Pitman :
Proposition 5.5. Soit X = (X
1
, X
2
, . . . , X
n
) un n-chantillon ^(0, 1), h(X)
une fonction relle homogne de degr 0 de X et Q(X) =
n
i=1
X
2
i
. Alors les
variables h(X) et Q sont indpendantes.
Preuve. Si v < 1/2, on a,
M(u, v) = E(expiuh(X) +vQ(X))
= (2)
n/2
_
R
n
expiuh(x)
1
2
(1 2v)Q(x) dx
1
dx
2
. . . dx
n
.
Eectuons le changement de variable : pour j = 1, . . . , n, x
j
= y
j
1 2v. h
tant homogne de degr 0, h(x) = h(y) et
M(u, v)=(2)
n/2
(1 2v)
n/2
_
R
n
expiuh(y) (1/2)Q(y)dy
1
dy
2
. . . dy
n
= (1 2v)
n/2
E(expiuh(X))
h(X) et Q(X) sont donc indpendants. .
Ce rsultat permet de calculer les moments de lindice de Moran I = P/Q,
rapport de formes quadratiques : I, homogne de degr 0, est indpendant de
Q(X) et donc, pour tout p 1,
E(P
p
) = E(I
p
Q
p
) = E(I
p
)E(Q
p
) soit E(I
p
) =
E(P
p
)
E(Q
p
)
.
Reste alors valuer les moments des formes quadratiques du numrateur
et du dnominateur. Notons que ce rsultat reste vrai si (X
1
, X
2
, . . . , X
n
)
est un n-chantillon ^(,
2
) : il sut de remplacer
n
i=1
X
2
i
par Q(X) =
n
i=1
(X
i
X)
2
. Pour lidentication des moments, on remarquera que Q(X)
suit alors une loi
2
2
n1
.
174 5 Statistique des modles spatiaux
5.2.3 Lindice de Geary
Lindice de Geary mesure la dpendance spatiale comme un variogramme :
I
G
n
=
(n 1)
i,jDn
w
ij
(X
i
X
j
)
2
2s
0n
iDn
(X
i
X)
2
.
I
G
est dautant plus petit que des valeurs semblables apparaissent en des sites
voisins, dautant plus grand sinon. I
G
est sensible aux dirences importantes
pour des couples de points voisins l o I
M
est sensible aux donnes extrmes
de X.
Sous les conditions de la proposition (5.4) et sous (H
0
), I
G
n
est asympto-
tiquement gaussien :
_
s
0n
2s
1n
+s
2n
(I
G
n
1) ^(0, 1).
Si X est gaussien, on a, exactement :
E(I
G
n
) = 1, V ar(I
G
n
) =
(2s
1n
+s
2n
)(n 1) 4s
2n
2(n + 1)s
0n
.
5.2.4 Test de permutation dindpendance spatiale
Dune faon gnrale, la loi permutationnelle dune statistique relle I(X) de
X = (X
i
, i = 1, . . . , n), conditionnellement aux n valeurs observes (x
i
, i =
1, . . . n), est la loi uniforme sur lensemble des valeurs I
= I(x
) de I pour les
n! permutations de 1, 2, . . . , n. Le niveau de signicativit bilatral (resp.
unilatral) associ est :
p
a
=
1
n!
1[I
[ > a (resp. p
a
=
1
n!
1I
> a).
Lorsque lnumration de toutes les permutations nest pas possible, on recourt
la mthode Monte Carlo en choisissant au hasard, pour m assez grand, m
permutations
1
,
2
, . . .,
m
pour lesquelles on calcule les valeurs I
et les
seuils de Monte Carlo associs p
MC
a
et p
MC
a
.
Pour tester lhypothse dindpendance (H
0
) : les X
i
sont i.i.d., sans
connatre la loi commune aux X
i
, on pourra utiliser la loi permutationnelle
de lindice de Moran et/ou de lindice de Geary. La justication du test est
que, sous (H
0
), une permutation des X
i
ne change pas la loi globale de X,
(X
i
, i = 1, . . . , n) (X
(i)
, i = 1, . . . , n).
Lavantage dune mthode permutationnelle est de fournir un test approch
non-asymptotique sans faire dhypothse sur la loi de X.
5.2 Autocorrlation sur un rseau spatial 175
plus petit que 27.32
27.32 28.38
28.38 30.18
30.18 31.04
plus grand que 31.04
(a) (b)
Fig. 5.9. (a) Pourcentage de la population prsentant le groupe sanguin A dans les
26 comts de lIrlande ; (b) graphe dinuence R (symtrique) sur les 26 comts.
Tableau 5.4. Taux du groupe sanguin A : indices de Moran et de Geary et statis-
tiques associes.
Index t
a
p
a
p
a
MC
Moran 0.554 4.663 0 0.001
Geary 0.380 -4.547 0 0.001
Si les n valeurs observes (x
i
, i = 1, . . . , n) sont direntes, lesprance
E
P
de lindice de Moran I
M
sous la loi permutationnelle vaut, sous (H
0
) (cf.
Ex. 5.3) :
E
P
(I
M
n
) =
1
n 1
.
Exemple 5.5. Pourcentage du groupe sanguin A dans 26 comts de lIrlande
La Fig. 5.9 reprsente le pourcentage des individus de groupe sanguin A
dans les 26 comts de lIrlande (cf. [45] et les donnes eire du package spdep).
La Fig. 5.9-a montre une ressemblance claire entre voisins, deux comts tant
voisins sils ont une frontire commune (cf. Fig. 5.9-b). On calcule (cf. Tableau
5.4) les indices de Moran et Geary t
a
= (I
a
E(I
a
))/
_
V ar(I
a
), a = M, G
(cf. spdep) pour cette relation de voisinage et w
ij
= 1/[i[ pour (i, j) , 0
sinon, ainsi que les niveaux de signicativit p
a
(gaussien) et p
a
MC
(pour la loi
permutationnelle avec m = 1000). Les rsultats conrment cette dpendance
spatiale.
Dautres statistiques de test de permutation dindpendance spatiale
Dautres statistiques que lindice de Moran ou lindice de Geary peuvent tre
retenues pour tester lindpendance spatiale. Suivant Peyrard et al. [173],
considrons un champ X = X
i,j
, (i, j) S observ sur la grille rgulire
176 5 Statistique des modles spatiaux
S = (i, j) : i = 1, . . . , I ; j = 1, . . . , J, X mesurant le degr de gravit
dune maladie dune espce vgtale plante sur S. Bien que S soit rgulier, la
maille nest pas ncessairement carre. Si la distance entre les lignes i est plus
importante que celle entre les colonnes j, on pourra retenir comme statistique
dvaluation de la dpendance spatiale le variogramme distance d le long de
la ligne, estim par :
(d) = (0, d) =
1
I(J 1)
I
i=1
Jd
j=1
(X
i,j
X
i,j+d
)
2
, d 1.
Pour tester lindpendance totale (H
G
0
) entre tous les sites, on considrera les
permutations sur lensemble S de tous les sites et les valeurs associes,
(d) =
1
I(J 1)
I
i=1
Jd
j=1
(X
(i,j)
X
(i,j+d)
)
2
, d 1.
Le test de Monte Carlo de (H
G
0
) peut tre ralis pour toute distance d en
construisant une bande de conance pour (0, d) avec des quantiles prdter-
mins sur la base de m permutations globales choisies au hasard (cf. Fig.
5.11-a) : si (0, d) sort signicativement de cette bande, on rejetera (H
G
0
).
Pour tester lindpendance entre les lignes i, (H
L
0
), on retiendra comme
indicateurs les variogrammes distance d le long des colonnes et on les com-
parera ceux calculs pour des permutations portant sur les seuls indices
de ligne i :
(d) = (d, 0) =
1
J(I 1)
Id
i=1
J
j=1
(X
i+d,j
X
i,j
)
2
, d 1,
(d, 0) =
1
J(I 1)
Id
i=1
J
j=1
(X
(i)+d,j
X
(i),j
)
2
, d 1.
Le test Monte Carlo de (H
L
0
) est alors construit sur la base de m permutations
de lignes choisies au hasard (cf. Fig. 5.11-b). Dautres choix de permutations
sont possibles pour tester cette hypothse.
Exemple 5.6. Dprissement de la lavande
Dautres mthodes de permutations appliques dautres tests (homog-
nit spatiale, indpendance de deux champs X et Y , indpendance condi-
tionnelles, etc.) sont examines dans [173] an dexplorer des donnes sur une
grille rgulire. Considrons lune de leurs tudes.
Une parcelle comporte I = 11 lignes et J = 80 colonnes de plants de
lavande. Deux plants conscutifs dune mme ligne sont espacs de 20 cm
alors que les lignes de culture sont espaces de 1 m. La parcelle est atteinte
5.2 Autocorrlation sur un rseau spatial 177
0
1
2
3
4
5
frequence
n
o
t
e
s
0 1 2 3 4 5
0
5
0
1
0
0
1
5
0
2
0
0
2
5
0
3
0
0
(a) (b)
Fig. 5.10. (a) Rpartition spatiale des notes (de 1 5) de dprissement de la
lavande cultive du plateau de Sault ; (b) histogramme des notes de dprissement
(Peyrard et al. [173].)
0 5 10 15 20
0
1
2
3
distance
v
a
r
i
o
g
r
a
m
m
e
l
e
l
o
n
g
d
e
l
a
l
i
g
n
e
0 2 4 6 8 10
0
1
2
3
4
distance
v
a
r
i
o
g
r
a
m
m
e
e
n
t
r
e
l
i
g
n
e
s
(a) (b)
Fig. 5.11. (a) Test dindpendance totale par permutation; (b) Test dindpendance
entre lignes. Les courbes en pointills correspondent aux limites de conance 2.5%
et 97.5%.
de dprissement (le mycoplasme) et on note de 0 (sain, pixels noirs) 5
(fortement atteint, pixels blancs) ltat sanitaire de chaque plan (cf. Fig. 5.10).
Les rsultats des tests sont donns pour m = 200 permutations et des
niveaux de conance 2.5% et 97.5%. Pour le test dindpendance globale (H
G
0
)
(cf. Fig. 5.11-a), (d) sort toujours de la bande de conance construite : il
ny a pas indpendance globale. Pour le deuxime test (H
L
0
) dindpendance
entre les lignes (cf. Fig. 5.11-b), (d) sort de la bande de conance pour
d = 1, 6 et 7, se plaant sa limite pour d = 2, 3 et 5 : on rejette galement
lindpendance entre les lignes.
178 5 Statistique des modles spatiaux
5.3 Statistique des champs du second ordre
Supposons que X soit un champ rel du second ordre dni sur un rseau
discret S. Nous examinerons dabord le cas o X est un champ stationnaire sur
S = Z
d
, puis celui o X est un champ AR sur un rseau non-ncessairement
rgulier et enn le cas dune rgression spatiale X = Z + o est un
rsidu champ spatial centr du second ordre. Des rsultats asymptotiques
sont prsents dans le cas o X est gaussien.
5.3.1 Estimation dun modle stationnaire sur Z
d
Soit X un champ rel sur Z
d
, centr et stationnaire au second ordre. Pour
simplier, on supposera que lobservation X(n) de X est faite sur le cube
D
n
= 1, 2, . . . , n
d
, le nombre dobservations tant N = n
d
= (D
n
). Au
problme des eets de bord prs, les rsultats prsents ici gnralisent de
faon naturelle ceux obtenus pour une srie chronologique stationnaire (d = 1).
Covariance empirique et rabotage des donnes
La covariance empirique distance k Z
d
vaut :
C
n
(k) =
1
N
i,i+kDn
X
i
X
i+k
, k Z
d
. (5.12)
Le choix dune normalisation commune par N
1
pour tous les k fait de
C
n
()
une fonction s.d.p., de support (n) = D
n
D
n
= i j : i, j D
n
.
En statistique spatiale, les eets de bord de D
n
augmentent avec la dimen-
sion d du rseau : en eet, N = n
d
nombre dobservations x, le pourcentage
de points au bord de D
n
est en dn
1
= dN
1/d
, nombre qui augmente avec
d. Ainsi, pour les covariances empiriques, un calcul simple montre que :
lim
n
NE(
C
n
(k) C(k)) =
0 si d = 1
[k
1
[ +[k
2
[ si d = 2
+ si d > 2 et k ,= 0
.
Sur Z, leet de bord, en n
1
= N
1
, est sans consquence sur le biais asymp-
totique ; sur Z
2
, il est en N
1/2
et devient signicatif, du mme ordre que la
vitesse N
1/2
; pour d 3, ce biais est dominant.
Pour liminer ce biais, une premire solution consiste remplacer dans
lexpression de la covariance empirique la normalisation en N
1
par N(k)
1
o N(k) est le nombre de couples (X
i
, X
i+k
) intervenant dans (5.12) ; mais
rien ne garantit alors la s.d.p. de la covariance estime.
Pour remdier ces inconvnients, Tukey [216] dnit des donnes X
w
(n)
rabotes au bord de D
n
(tapered data) par le rabot w. Pour d = 1, 2, 3 et
pour un rabotage convenable, ces estimateurs ne prsentent pas les dfauts
souligns prcdemment, ceci sans perte decacit. Le rabotage peut aussi
5.3 Statistique des champs du second ordre 179
amliorer lanalyse statistique car il diminue le poids des observations au bord
du domaine, observations qui souvent scartent du modle.
Dnissons ce rabotage. Soit w : [0, 1] [0, 1], w(0) = 0, w(1) = 1, un
prol de rabotage croissant de classe (
2
. Le w-rabot rabotant 100(1 )% des
donnes de bord est dni, pour 0 1, par :
h(u) =
_
w(2u/) si 0 u /2
1 si /2 u 1/2
et
h(u) = h(1 u), pour 1/2 u 1.
Par exemple, le rabot de Tukey-Hanning est w(u) = 2
1
(1 cos u). Les
donnes rabotes X
w
(n) sont :
X
w
i
= a
n
(i)X
i
, o a
n
(i) =
d
k=1
h
_
i
k
0.5
n
_
, i D
n
.
La covariance empirique rabote
C
w
n
sobtient alors partir des donnes ra-
botes X
w
(n) : pour d = 1, 2, 3 et un choix
n
= o(n
1/4
), le biais dun esti-
mateur rabot nest pas contribuant (Dalhaus et Knsch [57] ; [96, Ch. 4]).
Pseudo-vraisemblance gaussienne de Whittle
Supposons que X soit paramtr par sa densit spectrale f
, o est intrieur
, un compact de R
p
. Le spectrogramme rabot
I
w
n
() =
1
(2)
d
C
w
n
(k)e
ik
nest autre que lestimation de f
() associe aux covariances empiriques ra-
botes : comme pour une srie temporelle, I
w
n
() est un mauvais estimateur
de f
() frquence xe. Par contre, sous forme intgre, le spectrogramme
(rabot) conduit de bonnes estimations. En particulier, si X est gaussien,
Whittle [222] a montr quune bonne approximation de la log-vraisemblance
de X(n) est, une constante additive prs, gal 2U
n
() o :
U
n
() =
1
(2)
d
_
T
d
_
log f
() +
I
w
n
()
f
()
_
d, T = [0, 2[. (5.13)
De plus, que X soit gaussien ou non, la minimisation de U
n
conduit une
bonne estimation de sous des conditions raisonnables : 2U
n
() est appele
la pseudo log-vraisemblance de Whittle ou encore pseudo log-vraisemblance
gaussienne de X. Si (c
k
(), k Z
d
) sont les coecients de Fourier de f
1
,
une autre expression de U
n
est obtenue partir de lidentit :
(2)
d
_
T
d
I
w
n
()f
1
()d =
k
c
k
()
C
w
n
(k).
180 5 Statistique des modles spatiaux
Soit
n
= argmin
U() un estimateur du minimum de contraste U
n
(cf. Appendice C). Prsentons les proprits asymptotiques de
n
lorsque
X est un champ gaussien. Pour cela, notons :
() = (2)
d
_
T
d
(log f)
(1)
t
(log f)
(1)
()d,
e(h) =
__
1
0
h
4
(u)du
_ __
1
0
h
2
(u)du
_2
et supposons que
(W1) : Il existe 0 < m M < t.q. m f
M.
(W2) : est identiable, c.a.d. f
(.) est injective.
(W3) : f
() est indniment drivable en ; f
(2)
existe et est conti-
nue en (, ).
Thorme 5.1. [57; 96] Si X est un champ gaussien stationnaire vriant
(W), alors
n
Pr
. De plus, si
1
() existe, on a, pour les dimensions
d 3,
n
d/2
(
n
)
loi
^
p
(0, e
d
(h)
1
()).
Commentaires :
1. Les hypothses (W) sont vries si X est un ARMA, un SAR ou un CAR
identiable.
2. Lhypothse (W3) implique que X soit exponentiellement -mlangeant :
en eet, si f est analytique, les covariances de X dcroissent exponentiel-
lement et X tant gaussien, cela implique que X est exponentiellement
mlangeant (cf. Appendice B, B.2). Cette faible dpendance jointe au
TCL pour un champ -mlangeant (B.3) permet dobtenir la normalit
asymptotique du gradient U
(1)
n
() du contraste (condition (N2) du C.2.2).
Lhypothse f (
en peut tre aaiblie.
3. Le rsultat est vrai sans rabotage (e(h) = 1) pour d = 1. Pour les dimen-
sions d = 2 et 3, on peut choisir un h
n
-rabotage tel que e(h
n
) 1. Dans
ce cas,
n
est asymptotiquement ecace.
4. Le test dune sous-hypothse dnie par une contrainte (H
0
) : C() = 0,
o C : R
k
R
l
est rgulire de classe (
2
, sobtiendra en constatant que
C(
n
) est asymptotiquement gaussien et centr sous (H
0
).
5. Si X nest pas gaussien, on a encore convergence la gaussienne de
n
si X
est stationnaire lordre 4, X
0
admettant un moment dordre 4 + pour
un > 0 et si le coecient de -mlange de X dcrot assez vite [57; 96].
La variance asymptotique de
n
vaut alors
V ar(n
d/2
n
) e
d
(h)
1
()[() +B()]
1
(),
5.3 Statistique des champs du second ordre 181
o f
4,
est la densit spectrale des cumulants dordre 4 (cf. [96]), nulle si
X est gaussien, et,
B() =
(2)
d
4
_
T
2d
f
4,
(, , )
f
()f
()
(log f
)
(1)
()
t
(log f
)
(1)
()dd.
Identication dun CAR(M) gaussien par contraste de Whittle pnalis
Soit M (Z
d
)
+
, le demi-plan positif de Z
d
pour lordre lexicographique,
m = M. Si X est un CAR(P
0
) gaussien o P
0
M, lobjectif est didentier
P
0
dans la famille des CAR de supports P M, P = p. Lidentication par
contraste pnalis (cf. Appendice C, C.3) consiste estimer P
0
par :
P
n
= argmin
PM
_
U
n
(
P
) +
c
n
n
p
_
o
P
= argmin
P
U
n
().
P
est lensemble des R
p
tels que la densit
spectrale f
du CAR(P) associe est strictement positive partout. Ici, U
n
est le contraste de Whittle et c
n
est la vitesse de pnalisation portant sur
la dimension du modle. On a alors le rsultat didentication suivant [102,
Prop. 8] : si
2C
0
log log n c
n
c
0
n,
pour un c
0
> 0 assez petit et un C
0
< assez grand, alors,
P
n
P
0
en P
0
-probabilit.
5.3.2 Estimation dun modle auto-rgressif
Un champ rel centr du second ordre observ sur S = 1, 2, . . . , n est un
vecteur alatoire X = X(n) =
t
(X
1
, X
2
, . . . , X
n
) R
n
centr caractris
par sa matrice de covariance = Cov(X). Examinons les deux situations
dautorgression spatiale (cf. 1.7.4) :
1. Lauto-rgression simultane (SAR) :
X
i
=
jS:j,=i
a
i,j
X
j
+
i
,
o est un BB de variance
2
. Si A est la matrice A
i,i
= 0 et A
i,j
= a
i,j
si i ,= j, i, j S, alors X = AX + est bien dni ds que (I A) est
inversible, sa covariance valant :
=
2
t
(I A)(I A)
1
. (5.14)
Pour lestimation, il faudra sassurer de lidentiabilit des paramtres A
du SAR.
182 5 Statistique des modles spatiaux
2. Lauto-rgression conditionnelle (CAR) :
X
i
=
j:j,=i
c
i,j
X
j
+e
i
o V ar(e
i
) =
2
i
> 0 et Cov(X
i
, e
j
) = 0 si i ,= j.
Si C est la matrice C
i,i
= 0 et C
i,j
= c
i,j
si i ,= j, i, j S, et D la matrice
diagonale de coecients D
i,i
=
2
i
, le modle scrit (I C)X = e et
= D(I C)
1
. (5.15)
Dans la procdure numrique destimation, il ne faudra pas oublier dim-
poser les contraintes, pour tout i ,= j : c
i,j
2
j
= c
j,i
2
i
. Si
2
i
=
2
pour
tout i (resp. si X est stationnaire), ces contraintes sont c
i,j
= c
j,i
(resp.
c
ij
= c
ji
).
Un SAR (resp. un CAR) est un modle linaire dans le paramtre A (resp.
C). Dautre part, un SAR est un CAR, avec C =
t
A+A+
t
AA, mais on perd
alors la linarit en A. Pour de tels modles, deux mthodes destimation sont
envisageables :
1. Le maximum de vraisemblance si X est gaussien, pour la covariance (5.14)
ou (5.15) suivant les cas. Si le modle nest pas gaussien, cette fonction-
nelle gaussienne reste une bonne fonctionnelle destimation. La mthode
est tudie au paragraphe (5.3.4) dans le contexte de lestimation dune
rgression spatiale.
2. Lestimation par Moindres Carrs Ordinaires (MCO), naturelle puisque
quun AR est un modle linaire en = A pour un SAR, en = C pour
un CAR. Les MCO minimisent |()|
2
pour un SAR, |e()|
2
pour un
CAR. Un avantage des MCO est de fournir un estimateur explicite facile
calculer.
Cependant, pour lestimation des MCO, une dirence importante appa-
rat entre les modlisations SAR et CAR :
Proposition 5.6. Lestimation des MCO dun modle SAR est en gnral
non-consistante. Celle dun CAR est consistante.
Preuve. La non-convergence des MCO pour un SAR est un rsultat classique
pour un modle linaire Y = A + si les erreurs sont corrles aux r-
gresseurs A (quations simultanes en conomtrie). Pour sen convaincre,
considrons le modle SAR bilatral sur Z
1
,
X
t
= a(X
t1
+X
t+1
) +
t
, [a[ < 1/2.
X tant observ sur 1, 2, . . . , n, lestimation des MCO de a est
a
n
=
n1
t=2
X
t
(X
t1
+X
t+1
)
n1
t=2
(X
t1
+X
t+1
)
2
.
5.3 Statistique des champs du second ordre 183
Notons r() la covariance de X. X tant ergodique, on vrie facilement que,
si a ,= 0,
a
n
r
1
a(r
0
+r
2
)
r
0
+r
2
,= a.
La consistance des MCO pour un CAR rsulte des proprits standards
dun modle linaire, les rsidus conditionnels e
i
tant dcorrls de la variable
A(i) = X
j
, j ,= i expliquant X
i
, i = 1, . . . , n. .
Les proprits asymptotiques des MCO dun CAR gaussien de variances
rsiduelles toutes gales
2
seront prcises au 5.4.2 ; dans ce cas, les
MCO concident avec le maximum de la pseudo-vraisemblance conditionnelle
(PVC), X tant aussi un champ gaussien markovien (cf. 5.4.2).
5.3.3 Estimation du maximum de vraisemblance
Si X est un vecteur gaussien centr de R
n
de covariance (), lestimateur
du maximum de vraisemblance
n
de maximise
l
n
() =
1
2
_
log [()[ +
t
X
1
()X
_
.
Le calcul de
n
ncessitant une mthode doptimisation itrative, la dicult
numrique se situe dans le calcul du dterminant [()[ et de la forme qua-
dratique
t
X
1
()X. Pour une modlisation AR, on connat la forme para-
mtrique de la covariance inverse
1
et donc de
t
X
1
()X :
1. Pour un SAR :
t
X
1
()X=
2
|(I A)X|
2
; lestimation du MV est
2
=
2
(
n
) = n
1
_
_
_(I A(
n
))X
_
_
_
2
, o
n
= argmin
2n
1
log [I A()[ + log(
2
()).
Le calcul itratif de [()[ est simple pour certains modles. Par exemple,
pour le modle SAR un paramtre : (I W)X = , W tant
symtrique et I W inversible, [()[ =
2n
[I W[
2
et [I W[ =
n
i=1
(1 w
i
). Les valeurs propres w
1
w
2
. . . w
n
nont pas tre
recalcules au cours des itrations et ( ) est d.p. si : (a) < w
1
n
si
0 w
1
; (b) > w
1
1
si w
n
0 et (c) w
1
1
< < w
1
n
si w
1
< 0 < w
n
.
2. Pour un CAR,
t
X
1
()X=
2
e
t
X(I C)X si
2
i
=
2
e
pour i =
1, . . . , n :
2
e
=
2
e
(
n
) = n
1t
X(I A(
n
))X, o
n
= argmin
2n
1
log [I A()[ + log(
2
e
()).
Pour le CAR un paramtre : (I W)X = e, [()[ =
2n
e
[I W[
1
et [I W[ =
n
i=1
(1 w
i
).
184 5 Statistique des modles spatiaux
5.3.4 Estimation dune rgression spatiale
Une rgression spatiale (cf. 1.8) scrit, pour = (
s
) un champ centr du
second ordre,
X = Z +. (5.16)
o Z la matrice n q des conditions exognes est observe et R
q
.
Des modlisations linaires de la tendance E(X) sont fournies par les mo-
dles danalyse de la variance (exognes Z qualitatives, un ou plusieurs
facteurs), des modles de rgression (Z quantitatives de R
q
), des surfaces de
rponses E(X
s
) = f(s) ou des modles danalyse de la covariance (Z de nature
mixte). Par exemple :
1. Modle additif deux facteurs I J (q = I +J 1) :
E(X
i,j
) = +
i
+
j
, i = 1, . . . , I et j = 1, . . . , J,
= 0,
= 0.
2. Surface de rponse quadratique en (x, y) R
2
(q = 6) :
E(X
x,y
) = +ax +by +cx
2
+dy
2
+exy.
3. Pour z
i
une exogne,
E(X
i
) =
t
g(z
i
),
o g : E R
q
est connue.
4. Le modle combine une surface de rponse, une rgression et une danalyse
de la variance :
E(X
s
[ i, z) =
i
+ax +by +
t
g(z).
Estimation de la rgression par MCO
Lestimation des MCO de est :
= (
t
ZZ)
1 t
ZX.
Cet estimateur est sans biais, de variance, si = V ar(),
V ar(
) = = (
t
ZZ)
1 t
ZZ (
t
ZZ)
1
.
Si X est gaussien,
^
q
(, ). Il faut noter :
1.
nest pas ecace (cest lestimateur des MCG qui lest, cf. (5.18) et
5.3.4).
2. Si, pour tout i, V ar(
i
) =
2
, lestimateur habituel de
2
bas sur les
rsidus estims = X Z
est en gnral biais.
5.3 Statistique des champs du second ordre 185
3. La statistique habituelle dun test F de sous-hypothse portant sur d-
duite de cette estimation ne suit pas en gnral une loi de Fisher.
4. Lintrt des MCO est dtre un bon estimateur nexigeant pas de
connatre la structure spatiale : il servira comme estimateur initial
dans une procdure itrative destimation (cf. 5.3.4).
Si
est consistant, les MCO permettront destimer et de rendre rali-
sable la procdure des MCG. Donnons des conditions assurant cette consis-
tance et prcisant la vitesse de consistance. Si A est une matrice symtrique
s.d.p., on notera
M
(A) (resp.
m
(A)) la plus grande (resp. la plus petite)
valeur propre de A. En faisant dpendre lcriture des matrices Z de (5.16) et
= Cov() de n, on a la proprit suivante :
Proposition 5.7. Lestimateur
n
des MCO est consistant sous les deux
conditions suivantes :
(i)
M
(
n
) est uniformment borne en n.
(ii)
m
(
t
Z
n
Z
n
) si n ou encore (
t
Z
n
Z
n
)
1
0.
Dmonstration :
tant sans biais, il sut de vrier que la trace (note
tr) de V ar(
) tend vers 0. Utilisant lidentit tr(AB) = tr(BA), on a, pour
A = (
t
ZZ)
1 t
Z et B = Z (
t
ZZ)
1
:
tr(V ar(
)) = tr(Z(
t
ZZ)
2 t
Z)
M
()tr(Z(
t
ZZ)
2 t
Z)
=
M
()tr((
t
ZZ)
1
) q
M
()
m
(
t
ZZ)
n
0.
La premire ingalit est une consquence de la majoration, pour et V deux
matrices n n symtriques et s.d.p. :
tr(V )
M
()tr(V ).
.
Commentaires :
1. La condition (ii) porte sur le dispositif exprimental exogne (Z
n
). Si par
exemple (
t
Z
n
Z
n
)/n Q, o Q est d.p., alors (ii) est satisfaite et la
vitesse de convergence en variance est en n
1
. Cette condition est satisfaite
si, pour n = mr, Z
n
est la rptition de m fois un dispositif xe R
0
de
dimension r q de rang plein q (Q = (
t
R
0
R
0
)/m).
2. (i) porte sur le modle spatial et est satisfaite si la covariance de X
vrie :
sup
iS
jS
[(i, j)[ < .
Cette condition est satisfaite si X est un ARMA, un SAR ou un CAR
stationnaire.
186 5 Statistique des modles spatiaux
Preuve : Ecrivons
n
= ((i, j)). Soit v = (v
1
, v
2
, . . . , v
n
) un vecteur
propre non-nul associ une v.p. 0 de , i
0
vriant [v
i0
[ = max
i
[v
i
[.
[v
i0
[ est > 0 et lgalit v = v donne, pour la coordonne i
0
:
v
i0
=
jS
(i
0
, j)v
j
.
En divisant les deux membres de cette galit par v
i0
, lingalit triangulaire
applique lgalit prcdente donne le rsultat :
sup : valeur propre de sup
iS
jS
[(i, j)[ < .
.
Estimation de la rgression par MC Quasi Gnraliss
Considrons le modle (5.16) et supposons dans un premier temps que =
Cov(X) =
2
R est connue et inversible. Transform par prmultiplication
par R
1/2
, X
= R
1/2
X et Z
= R
1/2
Z, le modle (5.16) devient une
rgression rsidus
bruit blanc BB(
2
),
X
= Z
, (5.17)
avec E(
) = 0 et V ar(
) =
2
Id
n
.
Le modle (5.17) est donc un modle linaire standard et on sait (thorme
de Gauss-Markov) que le meilleur estimateur linaire, sans biais et de moindre
variance pour est lestimateur des Moindres Carrs Gnraliss (MCG) :
MCG
= (
t
Z
)
1 t
Z
= (
t
Z
1
Z)
1t
Z
1
X, (5.18)
avec V ar(
MCG
) = (
t
Z
1
Z)
1
. Si X est gaussien, les MCG concident avec
le maximum de vraisemblance.
Cependant, en gnral, nest pas connue. Si = () est de forme
paramtrique connue, R
p
tant inconnue, la stratgie destimation de
= (, ) R
q+p
par moindres carrs quasi gnraliss (MCQG) utilise
lalgorithme en deux pas suivant :
1. Estimer par MCO :
= (
t
ZZ)
1 t
ZX.
2. Calculer les rsidus des MCO : = X Z
.
3. Sur la base de , estimer
par une des mthodes
dveloppes prcdemment (par exemple 5.3-5.4 pour un
variogramme).
4. Estimer par
= (
) puis par MCG(
).
Les tapes 24 peuvent tre itres jusqu la convergence numrique des
estimations, donnant
MCQG
. Sous certaines conditions [75; 6] et si lestima-
tion
des MCO de converge une vitesse susante (par exemple n
1/4
,
5.3 Statistique des champs du second ordre 187
cf. Prop. 5.7 et [75]), une itration sut, les MCG et les MCQG tant alors
asymptotiquement quivalents :
lim
n
n(
MCQG
MCG
) = 0 en probabilit
et
n(
MCQG
) ^
p
(0, lim
n
n
t
(Z
n
1
n
Z
n
)
1
).
Les MCQG sont donc, pour n grand, de bons estimateurs. tudions le cas
dune rgression gaussienne.
MV pour une rgression spatiale gaussienne
Supposons que X ^
n
(Z, ()). Si () =
2
Q(), = (
2
, ), loppos
l(, ) de la log-vraisemblance de X(n) scrit, une constante additive prs :
2l(, ) = log [()[ +
t
(X Z)
1
()(X Z)
= nlog
2
+ log [Q()[ +
t
(X Z)Q
1
()(X Z)/
2
.
Lestimation du MV connue est donc :
= (
t
ZQ
1
()Z)
1 t
ZQ
1
()X, (5.19)
2
= (X Z
)Q
1
()(X Z
)/n. (5.20)
Le prol l
() de la log-vraisemblance en sobtient en remplaant (,
2
) par
leurs estimations dans l(, (
2
, )) :
l
() =
n
2
log[
t
XQ
1
()(I P())X] + log [Q()[ +n(1 log n), (5.21)
P() = Z(
t
ZQ
1
()Z)
1t
ZQ
1
(), (5.22)
o P est la projection orthogonale pour la norme ||
Q
1
sur lespace engendr
par les colonnes de Z. On estime alors par en maximisant (5.21), puis
et
2
par (5.19) et (5.20) avec .
Utilisant un rsultat de Sweeting [210] sur la normalit asymptotique du
MV, Mardia et Marshall [149] et Cressie [48, pp. 484485] montrent que, sous
certaines conditions, lestimateur du MV de la rgression X ^
n
(Z, ()),
= (
) de est consistant et asymptotiquement gaussien, la variance limite
tant donne par linverse de linformation de Fisher du modle, J(, ) =
E
,
l
(2)
(, ).
Dnissons les matrices :
i
= /
i
,
j
=
1
/
j
,
ij
=
2
/
i
j
,
ij
=
2
1
/
i
j
et t
ij
= tr(
1
j
) pour i, j = 1, . . . , p. Notons par ailleurs (
l
, l =
1, . . . , n) (resp. ([
i;l
[ ; i = 1, . . . , p et l = 1, . . . , n), ([
i,j;l
[ ; i, j = 1, . . . , p
et l = 1, . . . , n)) les valeurs propres de (resp.
i
,
ij
) ranges par ordre
croissant, et |G| = tr(G
t
G) la norme euclidienne dune matrice G.
188 5 Statistique des modles spatiaux
Thorme 5.2. (Mardia-Marshall [149])
Supposons que la rgression spatiale X ^
n
(Z, ()), R
q
et R
p
,
vrie les conditions suivantes :
(MM-1)
n
e < , [
i;n
[ e
i
< et [
i,j;n
[ e
ij
< pour i, j =
1, . . . , p
(MM-2) ||
2
= O(n
1/2
) pour un > 0
(MM-3) t
ij
/
t
i
t
j
a
ij
pour i, j = 1, . . . , p et A = (a
ij
) est rgulire
(MM-4) (
t
ZZ)
1
0
Alors :
J
1/2
(, )(
) (, )
loi
^
q+p
(0, I
q+p
),
o J(, ) = (
J
0
0 J
) pour J
=
t
Z
1
()Z et (J
)
ij
= (2
1
tr(
j
i
)).
Commentaires :
1. Lobtention de la forme analytique de J(, ) est donne en C.4.1.
2. J(, ) ne dpend que de : dans la pratique, on estimera J(, )
soit en remplaant par
, soit en utilisant la matrice dinformation
observe l
(2)
(
).
3.
et
sont asymptotiquement indpendants.
4. Puisque
j
=
1
1
et
i
=
i
,
(J
)
ij
= 2
1
tr(
1
i
) = 2
1
tr(
j
i
) = 2
1
tr(
i
j
).
On utilisera la premire expression de J
si () est de forme paramtrique
connue (modle de covariance ou de variogramme), la deuxime si cest
1
() qui est de forme paramtrique connue (modle SAR ou CAR).
5. Ce rsultat de normalit asymptotique permet de construire des tests
et des rgions de conance de faon jointe ou spare pour (, ). Par
exemple, la rgion de conance approche au niveau pour est, si q(p; )
le -quantile dun
2
p
,
: (
)J
) q(p; ).
Donnons un exemple didentication de J(, ) : Ord [167] considre la rgres-
sion spatiale rsidus SAR,
X = Z +, = (I W)e, e ^
n
(0,
2
I),
o R et W est une matrice de poids connus. Les paramtres du modle
sont (, (
2
, )) R
q+2
. Notant F = I W, G = WF
1
et
5.3 Statistique des champs du second ordre 189
=
n
1
w
2
i
1 w
2
i
,
o les (w
i
) sont les valeurs propres de W, la matrice dinformation J(, ) est
bloc diagonale de coecients :
J() =
1
2
t
(FZ)FZ, J(
2
) =
n
2
4
,
J() = tr(
t
GG), J(
2
, ) =
tr(G)
2
.
Mardia et Marshall [149] prcisent leur rsultat si le rsidu est stationnaire
sur Z
d
de covariance :
(i, j; ) =
2
(i j; ).
Notons
i
= /
i
et
ij
=
2
/
i
j
pour i, j = 1, . . . , p. Si , les
i
et les
ij
sont sommables sur Z
d
et si X est observ sur 1, 2, . . . , n
d
, alors, sous
les conditions (MM-3-4), le rsultat du thorme (5.2) est vri.
Corollaire 5.1. [149] Supposons que X, observ sur 1, n
d
Z
d
, soit
rsidus gaussiens stationnaires et que les corrlations et ses drives
i
et
ij
, i, j = 1, . . . , p, soient sommables sur Z
d
. Alors sous les conditions (MM-3)
et (MM-4), le rsultat du thorme prcdent reste valable.
Exemple 5.7. Pourcentage du groupe sanguin A dans 26 comts de lIrlande
(suite)
Pour les donnes rsumes par la Fig. 5.9, le test de Moran a indiqu
une dpendance spatiale pour la variable pourcentage. Cette dpendance
peut provenir dautres variables expliquant ce pourcentage, celui-ci tant par
exemple plus lev dans les rgions de colonisation anglo-saxonne. Pour cela,
on va considrer deux variables explicatives, lune quantitative, towns, le
nombre de villes par surface unitaire, et lautre qualitative, pale, qui indique
si le comt tait ou non sous contrle anglo-saxon.
La rgression du pourcentage sur ces deux variables pour des rsidus i.i.d.
(modle (a)) montre que seule pale est signicative (cf. Tableau 5.5, mo-
dle (a)).
La corrlation spatiale entre les rsidus subsiste : pour lindice de Moran
des rsidus I
R
=
t
rWr/
t
rr, on a [7, p. 102] , sil y a indpendance spatiale,
T = (I
R
E(I
R
))/
_
V ar(I
R
) ^(0, 1) avec E(I
R
) = tr(MW)/(n p) et
V ar(I
R
) =
tr(MWM (
t
W +W)) +tr(MW)
2
(n p)(n p + 2)
E(I
R
)
2
,
o M = I P, P tant la projection orthogonale sur lespace engendr par
les covariables Z. La valeur calcule de T tant t = 1.748, la corrlation des
rsidus reste signicative au niveau 10%. On propose alors un modle (b) de
rgression avec pale comme seule covariable et un rsidu SAR,
190 5 Statistique des modles spatiaux
Tableau 5.5. Rsultats de lestimation par MV de plusieurs rgressions spatiales
sur les donnes eire : (a) modle avec deux covariables towns et pale et erreurs i.i.d.
gaussiennes ; (b) modle avec pale comme seule covariable et erreurs SAR (carts
types estims entre ()).
Modles
Coecient (a) (b)
Intercept 27.573 (0.545) 28.232 (1.066)
towns 0.360 (2.967)
pale 4.342 (1.085) 2.434 (0.764)
0.684 (0.148)
r = Wr +,
pour W la matrice de contigut spatiale du graphe de voisinage. Les rsultats
du MV (cf. Tableau 5.5, modle (b)) montrent que le paramtre de dpendance
est signicativement dirent de zro.
Exemple 5.8. Inuence des implantations industrielles et de la consommation
de tabac sur le cancer du poumon
Cet exemple reprend une tude pidmiologique spatiale de Richardson
et al. [182] (cf. donnes cancer-poumon dans le site) portant sur la mortalit
par cancer du poumon et ses liens avec limplantation des industries mtal-
lurgiques (metal), mcaniques (meca) et textiles (textile), dune part, et la
consommation de cigarettes (tabac), dautre part.
Lorsque des donnes pidmiologiques prsentent une auto-corrlation spa-
tiale, linterprtation nest pas la mme sil sagit dune maladie infectieuse
(phnomne de diusion spatiale locale) ou dune maladie chronique comme
cest le cas ici. Dans ce cas, la corrlation peut trouver son origine dans des
covariables prsentant elles-mmes des dpendances spatiales. Si certaines de
ces variables sont observables, on les introduira dans une rgression tout en
veillant proposer un modle paramtriquement parcimonieux. Si les rsidus
de cette rgression restent corrls, lune des causes peut tre que ces rsidus
prennent en charge dautres facteurs spatiaux de risques cachs (variations
gographiques, inuences environnementales, etc).
La variable expliquer Y (cf. Fig. 5.12) est le taux de mortalit standardis
du cancer du poumon (nombre de dcs par cancer/nombre dhabitants) chez
les hommes de 35 74 ans sur les deux annes 19681969, taux mesur sur
82 dpartements franais (donnes INSERM-CpicDc IFR69).
Les ventes de cigarettes (SEITA) retenues sont celles de 1953, le dca-
lage de 15 ans en arrire permettant de prendre en compte linuence de la
consommation de tabac sur le cancer du poumon. La rgression tudie est,
Y = X +u, Y et u R
82
,
5.3 Statistique des champs du second ordre 191
< 0.05
0.05 0.07
0.07 0.08
0.08 0.1
> 0.1
(a) (b)
Fig. 5.12. (a) Taux (en pourcentage) de mortalit standardis du cancer du poumon
dans 82 dpartements franais ; (b) graphe dinuence R (symtrique) sur les 82
dpartements.
note (A) si on prend en compte uniquement les 3 variables industrielles et
(B) si on ajoute la variable tabac. Cinq modles spatiaux (paramtre ) sont
proposs pour le rsidu : les deux premiers sont du type AR sur rseau, les
trois suivants sont associs une structure paramtrique isotropique de la
covariance spatiale = Cov(u) :
1. Le CAR gaussien u
i
= c
ji
w
ij
x
j
+e
i
, V ar(e
i
) =
2
e
pour W la matrice
de contigut spatiale des 82 dpartements.
2. Le SAR gaussien u
i
= b
ji
w
ij
x
j
+
i
, V ar(
i
) =
2
o W
est la
matrice W o chaque ligne a t normalise 1.
3. Le modle disque :
i,j
=
2
f
a
(|i j|
2
).
4. Le modle de Matrn de paramtres (
2
; a, ) (cf. 1.3.3).
5. Le modle exponentiel ppitique : si i ,= j,
i,j
=
2
exp|i j|
2
,
1 et =
2
sinon.
Le modle de disque est lquivalent en dimension 2 du modle sphrique
(cf. 1.3.3), la sphre de rayon a tant remplace par le disque de rayon a.
Notons que ces modles ne sont pas embots, les trois premiers de dimension
2, les deux derniers de dimension 3.
Lindice de Moran calcul pour la matrice de poids normaliss W
montre
que les variables sont spatialement corrles (0.53 pour Y , 0.58 pour tabac,
0.41 pour metal et 0.26 pour textile) sauf la variable meca (0.12). De mme,
les rsidus des MCO des rgressions (A) et (B) sont signicativement corrls.
Le Tableau (5.6) donne le gain en log-vraisemblance entre les MCO (r-
sidus u i.i.d) et chacun des modles de rsidu pour (A) et (B). Ce gain
est galement valu par le critre de prdiction Press (Predictive Sum of
Squares), somme des carrs des rsidus conditionnels (
i
) du modle, rsidus
estims par
i
= u
i
j:j,=i
ij
ii
u
j
o (
ij
)
1
=
(
).
192 5 Statistique des modles spatiaux
Tableau 5.6. Gain dajustement par MV (
2
) et de prdiction (Press) pour 5
modles de rsidus et les rgressions (A) et (B) en comparaison des MCO.
Rgression A A B B
Modle
2
Press
2
Press
MCO 1.9010
6
0.9610
6
CAR
2
1
= 25.6 1.4410
6
2
1
= 2.1 0.9410
6
SAR
2
1
= 32.0 1.3710
6
2
1
= 8.2 0.8710
6
Disque
2
1
= 9.7 1.4010
6
2
1
= 9.4 0.8810
6
Expo+ppite
2
2
= 30.4 1.3410
6
2
2
= 8.4 0.8610
6
Matrn
2
2
= 25.5 1.4110
6
2
2
= 8.6 0.8610
6
Tableau 5.7. Estimation du MV des paramtres des 5 modles spatiaux, sous (A)
et sous (B) (e.t. pour carts types).
Rgression A A B B
Modle Paramtres e.t. Paramtres e.t.
CAR c = 0.175 0.005 c = 0.077 0.057
SAR
b = 0.613 0.103
b = 0.353 0.138
disque a = 94.31 5.66 a = 35.73 4.92
expo+ppite = 0.745 0.091 = 0.554 0.265
= 0.0035 0.0018
= 0.012 0.008
Matrn = 0.305 = 0.228
a = 112.36 16.41 a = 75.19 23.74
Le quantile dun
2
1
95% valant 3.841 (resp. 5.911 pour un
2
2
), les mod-
lisations spatiales amliorent signicativement le modle de rsidus i.i.d. sauf
le CAR-(B). Lamlioration de la prdiction est de lordre de 30% pour (A)
et de (10%) pour (B), la prise en compte de la variable tabac faisant, comme
attendu, dcrotre la statistique du
2
et le critre Press.
Le Tableau (5.7) donne les estimateurs du MV des paramtres spatiaux et
leurs carts types. Tous les paramtres sont signicatifs pour (A) et montrent
une dpendance plus faible pour (B). Pour le modle CAR-(B), c nest plus
signicatif. Pour le modle SAR associ W
, b sinterprte comme le poids
dinuence du voisinage. Le paramtre 2a 188 km du modle disque re-
prsente la distance partir de laquelle la corrlation sannule. Le paramtre
= 0.305 du modle de Matrn estim indique une dcroissance de type
linaire lorigine.
Le Tableau (5.8) donne les estimations des rgressions (A) et (B) pour trois
modles de rsidus, (i) indpendants (MCO), (ii) SAR et (iii) covariance de
Matrn. On constatera que la modlisation spatiale a une inuence forte sur
lestimation des paramtres mais pas sur leur prcision : par exemple, pour (A)
et metal, la modlisation spatiale rduit de moiti la pente (
MCO
/
SAR
=
1.77) et la statistique t associe (t
MCO
/t
SAR
= 1.95) ; dautre part, elle a
rendu non-signicative la variable textile. Comme on pouvait sy attendre, la
prise en compte de la variable tabac diminue signicativement lensemble des
coecients et leurs carts types.
5.4 Estimation dun champ de Markov 193
Tableau 5.8. Estimations (et carts types) des coecients des rgressions (A) et
(B) sous trois modles de rsidus : (i) indpendance, (ii) SAR et (iii) Matrn.
Rgression et modle u Mtallurgie Mcanique Textile
(A) et MCO 2.46 (0.39) 1.88 (0.63) 1.12 (0.53)
(A) et SAR 1.39 (0.42) 2.11 (0.55) 0.38 (0.49)
(A) et Matrn 1.35 (0.43) 1.90 (0.57) 0.38 (0.50)
(B) et MCO 1.50 (0.27) 1.29 (0.46) 0.84 (0.38)
(B) et SAR 1.11 (0.32) 1.37 (0.45) 0.61 (0.39)
(B) et Matrn 1.05 (0.32) 1.24 (0.44) 0.62 (0.38)
En conclusion, la prise en compte de la structure spatiale du rsidu in-
uence signicativement lestimation des rgressions (A) et (B), les variables
metal et meca tant signicatives mais pas la variable textile.
5.4 Estimation dun champ de Markov
Soit X un champ de Markov sur lensemble discret de sites S R
d
et
valeur dans = E
S
, S tant muni dun graphe de voisinage symtrique (.
On supposera que la loi P
de X est connue via ses spcications condition-
nelles
(cf. Ch. 2, 2.2.1), elle-mme associe un potentiel paramtrique
=
A,
, A o, o est intrieur un compact R
p
. On notera ((
)
lensemble des lois sur de spcication
et (
s
(
) celles qui sont station-
naires si S = Z
d
. On supposera que le graphe ( ne dpend pas de et que X
est observ sur D
n
D
n
S, o D
n
est la frontire de voisinage de D
n
.
On va prsenter trois procdures destimation de ainsi que certaines
proprits asymptotiques : maximum de vraisemblance (MV ), maximum de
pseudo-vraisemblance conditionnelle (PV C) et estimation par C-codage. On
donnera galement des rsultats didentication du support de voisinage dun
champ de Markov.
5.4.1 Le maximum de vraisemblance
Si X est de loi P
((
), la loi de X sur D
n
conditionnelle x(D
n
) admet
une densit d nergie H
n
(cf. 2.2.1) :
n
(x; ) = Z
1
n
(x
Dn
; ) expH
n
(x; )
o H
n
(x; ) =
A:ADn,=
A
(x; ).
Consistance du MV : S = Z
d
et
invariante
On suppose que S = Z
d
, que
est invariante par translation appartenant
la famille exponentielle H
n
(x; ) =
t
h
n
(x),
194 5 Statistique des modles spatiaux
h
k,n
(x) =
iDn:(i+A
k
)Dn,=
A
k
(
i
(x)), pour k = 1, . . . , p , (5.23)
o
i
est la translation sur Z
d
dnie par : j, (
i
(x))
j
= x
i+j
. Dans cette
criture, les =
A
k
, k = 1, . . . , p sont p potentiels gnrateurs mesurables
et borns et =
t
(
1
,
2
, . . . ,
p
) R
p
est le paramtre du modle. Notons
n
= Arg max
n
(x; ) lestimateur du MV sur . Pour simplier, on
supposera que D
n
= [n, n]
d
. On a le rsultat :
Thorme 5.3. Supposons que X de spcication
invariante par transla-
tion (5.23) soit stationnaire. Alors, si les potentiels gnrateurs sont mesu-
rables et borns et si la paramtrisation en de
0,
, la loi conditionnelle en
0, est propre, alors lestimation
n
du MV est consistante.
La dmonstration de ce rsultat est donne lAppendice C, C.4.2.
Commentaires
1. Une des dicults du MV rside dans le calcul de la constante de normali-
sation Z
n
(x
Dn
; ). Nous prsenterons au 5.5.6 une mthode MCMC per-
mettant un calcul approch de Z
n
(x
Dn
; ) pour un processus de Gibbs.
2. La consistance reste vrie si le conditionnement (ici en x
Dn
) se fait par
rapport une condition extrieure y
Dn
(voire une suite de conditions
extrieures) arbitraire (MV conditions frontires xes). Il en est de
mme pour le MV conditions frontires libres qui fait disparatre la
contribution dun potentiel ds que son support dborde de D
n
(lnergie
vaut alors H
n
(x; ) =
ADn
A
(x; )).
3. Donnons une condition susante assurant que la paramtrisation
0,
est propre o,
0,
(x/v) = Z
1
(v; ) exp(
t
h(x, v)) avec h
k
(x, v) =
A
k
(x, v).
Sans restreindre la gnralit du modle, on supposera vrie la
contrainte didentiabilit des potentiels
A
k
(cf. (2.3)). Alors, la re-
prsentation en de
0,
est propre si :
w
i
= (x
i
, v
i
), i = 1, . . . , K t.q. H = (h(w
1
), . . . , h(w
K
)) est de rang p.
(5.24)
En eet si ,= , (x, v) t.q.
t
( )h(x, v) ,= 0 et on en dduit que
0,
(x/v)
0,
(a/v)
= exp(
t
h(x, v)) ,= exp(
t
h(x, v)) =
0,
(x/v)
0,
(a/v)
.
Considrons par exemple le modle binaire (E = 0, 1) sur Z
2
aux 8 ppv
et dnergie conditionnelle,
5.4 Estimation dun champ de Markov 195
H
0
(x
0
, v) = x
0
+
1
(x
1
+x
5
) +,
2
(x
3
+x
7
) +
1
(x
2
+x
6
) +(x
4
+x
8
)
o 1, 2, . . . , 8 est lnumration dans le sens trigonomtrique des 8-ppv de
0. Notant x = (x
0
, x
1
, . . . , x
8
), il est facile de voir que les 5 congura-
tions suivantes ralisent (5.24) : (1, 0), (1, 1, 0), (1, 0, 0, 1, 0), (1, 0, 1, 0) et
(1, 0, 0, 0, 1, 0) (dans cette criture, 0 est le vecteur de 0 tel que chaque
conguration appartienne R
9
).
4. La consistance du MV est maintenue si
est invariante par transla-
tion sans hypothse dappartenir une famille exponentielle condition
que les potentiels
A,
, 0 A soient uniformment continus en , ceci
uniformment en x [96].
5. Si lespace dtat E de X est compact, Comets [46] dmontre la consistance
du MV sans supposer la stationnarit de X ; sa dmonstration utilise une
ingalit de grandes dviations pour les champs de Gibbs [46; 85; 96] ainsi
que la compacit de lespace (
s
(
). Lintrt de ce rsultat est de ne
faire aucune hypothse sur la loi de X autre que celle de linvariance par
translation de sa spcication conditionnelle. De plus, il est dmontr que
la convergence se fait une vitesse exponentielle :
> 0,
1
> 0 t.q. pour n grand, P
(
_
_
_
n
_
_
_ ) C exp
1
(D
n
).
6. Lobtention dun rsultat gnral de convergence gaussienne de lestima-
tion du MV pour un champ de Gibbs est dicile. Lune des raisons est que
la loi P
((
) de X ntant connue que via ses spcications condition-
nelles, on ne sait pas sil y a ou non transition de phase, si la loi P
de X est
faiblement dpendante, par exemple si P
est -mlangeante (cf. B.2). Si
P
est caractrise par ses spcications et si P
est -mlangeante, alors
n
est asymptotiquement gaussien si le mlange est assez rapide [96].
Normalit asymptotique du MV et test de sous-hypothse si X est faiblement
dpendant
Notons d
n
= D
n
et supposons que D
n
= o(d
n
). La normalit asymptotique
de lestimateur
n
du MV est tablie sous une condition de faible dpendance
de X, de rgularit (
2
et de bornitude pour les potentiels
A
(), A (,
[96, Thorme 5.3.2]. La variance asymptotique de
n
sidentie de la faon
suivante. Dnissons lnergie moyenne au site i par :
i
(x; ) =
A: iA
A
(x; )
A
et pour
, la loi de X sous , la matrice dinformation de Fisher :
I
n
() =
i,jDn
Cov
(
(1)
i
(x; ),
(1)
j
(x; )).
196 5 Statistique des modles spatiaux
Alors, sil existe une matrice I
0
dterministe, symtrique et d.p., telle que
liminf
n
d
1
n
I
n
() I
0
, alors, pour n grand :
(
n
) ^
p
(0, I
n
()
1
).
Lvaluation numrique de I
n
() sobtiendra par mthode de Monte Carlo
sous
n
.
Notons (H
p
) lhypothse : R
p
et soit (H
q
) une sous-hypothse de
classe (
2
de dimension q paramtre en R
q
. Notant l
n
= log
n
(x)
la log-vraisemblance conditionnelle x(D
n
), on a le rsultat de dviance
du MV :
Sous (H
q
) : 2l
n
(
n
) l
n
(
n
)
2
pq
.
5.4.2 Pseudo-vraisemblance conditionnelle de Besag
La pseudo-vraisemblance conditionnelle (PV C) dun champ de Markov X
est le produit pour les sites i D
n
des densits conditionnelles en i ; la
log-pseudovraisemblance et lestimation du maximum de PV C sont respecti-
vement :
l
PV C
n
() =
iDn
log
i
(x
i
[ x
i
, ) et
PV C
n
= argmax
l
PV C
n
().
Cette mthode destimation, propose par Besag en 1974 [25], est plus
simple mettre en oeuvre que le MV car elle vite le calcul de la constante
de normalisation dun champ de Markov. Dautre part, quand elle peut tre
calcule, lecacit de la PV C par rapport au MV est bonne si la corrla-
tion spatiale reste modre (cf. 5.4.4). A titre dillustration, spcions cette
mthode dans deux contextes particuliers.
Estimation dune texture de niveaux de gris
Considrons X une texture de Markov sur Z
2
, tats E = 0, 1, de potentiels
i]
(x) =
0
x
i
et
k
i,j]
(x) =
k
x
i
x
j
si i j = k, i, j Z
2
o k L Z
2
pour L nie et symtrique, 0 / L. Si X est observe sur le carr D
n
D
n
,
la PV C vaut :
L
PV
n
=
iDn
exp x
i
(
0
+
k,=0
k
x
i+k
)
1 + exp(
0
+
k,=0
k
x
i+k
)
.
La Fig. 5.13 donne trois exemples de textures relles binaires tudies par
Cross et Jain [51].
Ces textures ont t modlises par des champs de Markov, puis estimes
par maximum de PV C. Enn, les modles estims ont t simuls par chan-
tillonneur de Gibbs. Ladquation visuelle des simulations avec les textures
originales montre la fois la bonne qualit des modlisations retenues mais
aussi celle de la mthode destimation par PV C.
5.4 Estimation dun champ de Markov 197
Estimation
(c) (b) (a)
Simulation
Fig. 5.13. Textures binaires relles 64 64 : estimation et simulation. (a) caillou,
(b) lige, (c) rideau. (Cross et Jain [51], c 1983 IEEE.)
CAR gaussien un paramtre
Considrons un modle CAR un paramtre rel ,
X
i
=
j:j,=i
w
ij
X
j
+e
i
, V ar(X
i
[ ) = , i = 1, . . . , n,
o W est une matrice symtrique diagonale nulle. Le modle associ existe
si C = I W est d.p., c--d si [[ < 1 pour toute valeur propre de
W. En situation gaussienne, lestimation par PV C de concide avec celle
des MCO sur les rsidus conditionnels e : en eet, L(X
i
[x
i
) ^(v
i
, ) o
v
i
=
j:i,j)
w
ij
x
j
et loppos de la log-vraisemblance conditionnelle est :
l
PV C
n
() = cste +
D
n
2
log +
SCR
n
()
2
,
o
SCR() =
iDn
(x
i
v
i
)
2
.
Le modle tant linaire en , on obtient :
=
t
XWX
t
XW
2
X
, =
t
XX (
t
XWX)
2
/
t
XWX
n
.
Pour n grand, les rsidus e
i
tant dcorrls des v
i
pour i = 1, . . . , n, on a
[26] : E(
n
) , E( ) , V ar(
n
) = 2tr(W
2
)tr(C
1
W
2
)
2
et V ar( ) =
2
2
tr(C
2
)/n
2
.
198 5 Statistique des modles spatiaux
Nous allons prsenter trois rsultats asymptotiques concernant lestimation
du maximum de PV C : le premier est un rsultat de consistance pour un
champ X dni sur un rseau S non-ncessairement rgulier ; les deux suivants
sont des rsultats de normalit asymptotique lorsque la spcication sur Z
d
est invariante par translation, le premier dans le cas de potentiels borns,
lautre dans le cas de potentiels gaussiens.
Consistance de lestimation du PMV
On considre que S est un rseau discret dnombrable non-ncessairement
rgulier, ( un graphe symtrique sur S et X un champ markovien sur (S, ()
valeur dans =
iS
E
i
(on sautorise des espaces dtats dirents suivant
les sites). X, de loi P
et de spcication
( est intrieur un compact
R
p
) est observ sur une suite strictement croissante (D
n
D
n
), d
n
=
D
n
. Posons quelques dnitions et conditions.
Ensemble de codage
C est un sous-ensemble de codage de S si, pour tout i ,= j de C, j / i.
A est un sous-ensemble de codage fort si, pour tout i ,= j de A, alors
i j = .
Notons
i
et
i
les spcications en i et sur i,
m
i
(, ; x
i
) = E
x
i
_
log(
i
(X
i
[x
i
, )
i
(X
i
[x
i
, )
_
( 0)
et posons les conditions (C) suivantes :
(C1) Sur le graphe (S, () : il existe C un sous-ensemble de codage de S,
runion disjointe de K sous-ensembles de codage fort C
k
tels que,
posant A
n
= A D
n
, c
n
= (C
n
), c
n,1
= (C
1,n
) :
(i) liminf
n
c
1,n
/c
n
> 0 et liminf
n
c
n
/d
n
> 0.
(ii) =
ii
E
i
est un espace xe de congurations de voisinage si
i C
1
.
(C2) Minoration de
: c > 0 t.q., i C
1
, x
i
, x
i
, x
i
et :
i
(x
i
[x
i
, ) et
i
(x
i
[x
i
, ) c,
i,
tant, uniformment en i, x
i
,
x
i
, continue en .
(C3) Identiabilit en de
: il existe m(, ; z) 0, (, z) ,
-intgrable pour tout telle que :
(i) m
i
(, ; z) m(, ; z) si i C
1
.
(ii) K(, ) =
_
m(, ; z)(dz) est continue admettant un unique
minimum en = .
Thorme 5.4. Consistance de lestimation par PV C [96]
Soit X un champ de Markov sur S vriant les conditions (C13). Alors
lestimateur du maximum de PV C sur D
n
est convergent.
5.4 Estimation dun champ de Markov 199
Preuve. On va commencer par dmontrer la consistance de lestimateur
de C
1
-codage (cf. (5.25)). La proprit la base de la dmonstration est
lindpendance des X
i
, i C
1
conditionnellement x
C1
, la ralisation du
champ en dehors de C
1
. Montrons dabord la proprit de sous-ergodicit
suivante :
Lemme 5.1. [83; 121; 96] Soit A un sous-ensemble mesurable de , la fr-
quence empirique dapparition de A sur C
1
tant dnie par :
F
n
(A; C
1
) =
1
c
1,n
iC1,n
1(x
i
A).
Alors :
liminf
n
F
n
(A; C
1
)
c
2
(A) P
-p.s..
Dmonstration du lemme : Daprs (C2), les variables 1(X
i
A) sont des-
prances c(A), de variances 1 et sont, conditionnellement x
C1
, ind-
pendantes. La loi forte des grands nombres pour des variables de L
2
, condi-
tionnellement x
C1
indpendantes, donne (Breiman [32, Th. 3.27]) :
liminf
n
F
n
(A; C
1
)
c
2
(A), P
x
C
1
-p.s..
La majoration ne dpendant pas de x
C1
reste vraie P
-p.s..
.
Suite de la dmonstration du thorme : Considrons alors le C
1
-contraste de
codage,
U
C1
n
() =
1
c
1,n
iC1,n
log
i
(x
i
[ x
i
; ) (5.25)
et crivons U
C1
n
() U
C1
n
() = A
n
+B
n
o :
A
n
=
1
c
1,n
iC1,n
_
log
i
(x
i
[ x
i
; )
i
(x
i
[ x
i
; )
+m
i
(, ; x
i
)
_
,
A
n
tant la somme de variables centres, de variances bornes (C2) et condi-
tionnellement x
C1
indpendantes, lim
n
A
n
= 0 P
p.s.. On en dduit, P
p.s., la suite de minorations :
liminf
n
(U
C1
n
() U
C1
n
()) = liminf
n
B
n
(5.26)
liminf
n
_
m(, ; z)F
n
(C
1
, dz) (C3)
m(, ; z)liminf
n
F
n
(C
1
, dz) (car m 0)
c
2
_
m(, ; z)(dz) K(, ) (lemme (5.1)).
200 5 Statistique des modles spatiaux
Lestimateur de codage tant associ U
C
n
() =
K
k=1
c
k,n
c
1
n
U
C
k
n
(), sa
consistance dcoule de (5.26), des conditions (C) et du corollaire de la pro-
prit gnrale de consistance dune mthode de minimum de contraste (cf.
Appendice C, C.2). La consistance de lestimateur de PV C rsulte de ce mme
corollaire.
.
Les conditions (C13) doivent tre vries au cas par cas. Examinons
deux exemples, lun associ un graphe (S, () irrgulier, lautre un champ
de spcication invariante par translation sur S = Z
d
.
Exemple 5.9. Un modle dIsing sur graphe irrgulier
Considrons un modle dIsing tats 1, +1 sur un graphe (S, () tel que
(C1) est vrie, la spcication en i C scrivant :
i
(x
i
[ x
i
; ) =
exp x
i
v
i
(x
i
; )
2 chv
i
(x
i
; )
,
o v
i
(x
i
; ) = u
i
+
ji
w
ij
x
j
, pour des poids (u
i
) et (w
ij
) connus, w
tant symtrique et vriant pour tout i :
i
w
ij
= 1. Le paramtre du
modle est =
t
(, ). Supposons que les poids u et w soient borns ; les
potentiels tant borns, il est facile de voir que (C2) est vrie. Dautre part,
on vrie que m
i
(, ; x
i
) = m(v
i
(), v
i
()) o
m(a, b) = (a b)th(a) log
ch(a)
ch(b)
0,
m(a, b) valant 0 si et seulement si a = b. Si = (
0
,
0
),
v
i
(x
i
; ) v
i
(x
i
; ) = (
0
)u
i
+ (
0
)
ji
w
ij
x
j
.
Sil existe > 0 t.q. inf
iC
u
i
, (C3) est vrie : en eet, pour la
conguration x
i
constante sur i (1 si (
0
)(
0
) < 0 et +1 sinon),
[v
i
(x
i
; ) v
i
(x
i
; )[ | |
1
.
Exemple 5.10. Champ de Markov sur Z
d
spcication invariante
Soit X un champ de Markov sur Z
d
de spcication invariante appartenant
la famille exponentielle (5.23), les potentiels
A
k
, k = 1, . . . , K tant
mesurables et uniformment borns. Si la paramtrisation de
0],
est identiable, alors les conditions (C13) sont satisfaites et la mthode de
PV C est consistante. En eet, si R = sup|i|
1
, i 0, C = aZ
d
est
un ensemble de codage si a est un entier 2R; dautre part, le choix des b-
translats de C
1
= 2aZ
d
pour les 2
d
vecteurs b = (b
1
, b
2
, . . . , b
d
), o b
i
= 0
ou a, i = 1, . . . , d, dnit une partition de C en 2
d
sous-ensembles de codage
fort pour laquelle (C1) est vrie. Quant (C2), elle rsulte directement de
la majoration uniforme en (x, ) de lnergie, [H
(x, )[ c().
5.4 Estimation dun champ de Markov 201
Normalit asymptotique du PMV
Champ de Markov de spcication invariante par translation Supposons que
X soit un champ de Markov sur S = Z
d
de loi P
((
) spcication
invariante par translation et appartenant la famille exponentielle (5.23).
Notons :
J
n
() =
iDn
jiDn
Y
i
()
t
Y
j
(), I
n
() =
iDn
Z
i
(), (5.27)
avec Y
i
() = log
i
(x
i
/x
i
; )
(1)
et Z
i
() = log (x
i
/x
i
; )
(2)
2
.
Thorme 5.5. Normalit asymptotique de lestimateur par PVC (Comets et
Janzura [47])
Supposons que X soit un champ de Markov sur S = Z
d
de spcication
invariante par translation et appartenant la famille exponentielle (5.23),
les potentiels gnrateurs
A
k
tant mesurables et borns. Alors, si
i,
est
identiable en ,
J
n
(
n
)
1/2
I
n
(
n
)
loi
^
p
(0, I
p
).
Lintrt de ce rsultat est quil ne fait aucune hypothse sur la loi globale
de X, ni lunicit de P
dans ((
), ni sa stationnarit et/ou son ergodicit,
ni sa faible dpendance. La normalisation alatoire I
n
(
n
)
1/2
J
n
(
n
) ne se
stabilise pas ncessairement avec n mais redresse
n
pour donner la nor-
malit asymptotique. Celle-ci rsulte dun TCL tabli pour des fonctionnelles
conditionnellement centres dun champ de Markov (cf. Appendice B, B.4), la
fonctionnelle utilise ici tant le gradient Y
i
() de la log-densit conditionnelle
(cf. [47] dans le cas gnral ; [99] dans le cas dun champ ergodique).
X est un CAR gaussien stationnaire sur Z
d
.
Soit le CAR : X
i
=
jL
+ c
j
(X
ij
+X
i+j
) +e
i
, i D
n
, V ar(e
i
) =
2
. Cette
spcication scrit encore sous forme matricielle,
X(n) = A
n
c +e(n),
o A
n
est la matrice n p de i-ime ligne (A(i) = (X
ij
+ X
i+j
), j L
+
),
i D
n
, et c = (c
j
, j L
+
)
.
= R
p
. Concidant avec les MCO, lestimation
c
n
du maximum de PV C est explicite puisque le modle est linaire :
c
n
= (A
n
A
n
)
1
A
n
X(n) et
2
n
=
1
n p
iDn
e
2
i
(c
n
).
Posant V
j
= Cov(A(0), A(j)), notons :
G =
2
V
0
+
2
I 2
L
+
c
j
V
j
et = V
1
0
GV
1
0
,
202 5 Statistique des modles spatiaux
et supposons que
L
+ [c
j
[ < 1/2 : sous cette hypothse, la loi de X est alors
compltement spcie, et cest celle dun champ gaussien, ergodique dont
la covariance est dcroissance exponentielle ; X est donc exponentiellement
-mlangeant (cf. Appendice B, B.2 ; [96]) et on en dduit :
n(c
n
c)
loi
^
p
(0, ).
Le rsultat stend dautres modles o c = (c
s
, s L
+
) est constant sur des
sous-ensembles de L
+
, comme par exemple pour des sous-modles prsentant
des isotropies.
Signalons que la normalit asymptotique de lestimateur de PVC peut
sobtenir sans condition dinvariance sur la spcication de X condition que
X soit -mlangeant avec une vitesse de mlange convenable [96, 5.3.2].
Identication de la variance asymptotique de lestimation par PVC
Lobtention numrique de lestimateur
PV C
n
de PVC peut se fait en utilisant
un logiciel ddi lestimation des modles linaires gnraliss (MLG) ds
lors que les spcications conditionnelles
i
( [ x
i
, ), i S suivent des
modles log-linaires. En eet, dans ce cas, les covariables de voisinage x
i
sajoutent aux covariables standards dun MLG et, dans loptimisation de la
fonctionnelle destimation, rien ne distingue la PVC de la vraisemblance dun
MLG pour des variables indpendantes.
Par contre les carts types fournis par le programme MLG ne sont pas les
bons. En eet, contrairement la situation standard des MLG, les variables
(X
i
[ x
i
) ne sont pas indpendantes et les arguments utiliss pour identier
la variance de lestimateur du MV dun MLG ne sont plus valables. Montrons
alors comment identier la variance asymptotique de
PV C
n
.
Comme il a dj t prcis dans le rsultat de Comets et Janzura, cette
variance asymptotique va sexprimer partir de deux matrices I
n
et J
n
de
pseudo-information (cf. (5.27) et lAnnexe C, Hypothses (C.2.2)).
Examinons la situation dun champ de Markov X faiblement dpendant
[96, Th. 5.3.3]. Associes aux nergies conditionnelles :
h
i
(x
i
[ x
i
, ) =
A: iA
A
(x; ), i S,
dnissons les deux matrices de pseudo-information I
n
() et J
n
() :
J
n
() =
i,jDn
Cov
(h
(1)
i
(), h
(1)
j
()),
I
n
() =
iDn
E
V ar
X
i
h
i
(X
i
[ X
i
, ). (5.28)
Sil existe une matrice dterministe K
0
, symtrique et d.p., telle que
liminf
n
d
1
n
J
n
() et liminf
n
d
1
n
I
n
() K
0
, alors, pour n grand :
5.4 Estimation dun champ de Markov 203
V ar(
PV C
n
) I
1
n
()J
n
()I
1
n
().
Lobtention numrique de la variance de
PV C
n
peut provenir de trois
modes de calcul :
1. Soit en utilisant le rsultat de [47] partir des valuations des deux ma-
trices de pseudo-information (5.27).
2. Soit en estimant empiriquement les esprances et variances de (5.28) par
mthode de Monte Carlo sous
PV C
n
.
3. Soit par bootstrap paramtrique, le cadre asymptotique ntant pas requis.
5.4.3 La mthode de codage
Soit X un champ de Markov sur (S, (). Rappelons que C est un sous-ensemble
de codage de (S, () si deux points distincts de C ne sont jamais voisins. Dans
ce cas, les variables conditionnelles (X
i
[x
i
), i C sont indpendantes. La
log-pseudo-vraisemblance de codage l
C
n
sur C
n
= C D
n
et lestimateur de
codage associs sont respectivement,
l
C
n
() =
Cn
log
i
(x
i
[ x
i
, ) et
C
n
= argmax
l
C
n
().
Conditionnellement x
C
, la ralisation du champ extrieure C, l
C
n
est
une log-vraisemblance de variables indpendantes, non-identiquement distri-
bues (n.i.d.) : si par rapport lestimation par PV C on perd linformation
apporte par les sites i D
n
C
n
, on garde par contre lexpression dune vrai-
semblance (conditionnelle x
C
) globale. Ceci permet, sous une condition de
sous-ergodicit, de maintenir les proprits asymptotiques du MV pour des
variables indpendantes n.i.d..
Dautre part, si la spcication (
i
) suit un modle linaire gnralis
(MLG), on pourra utiliser les logiciels ddis aux MLG pour calculer lesti-
mation par codage : ici tant lestimation
C
n
donne par un logiciel MLG que
la variance calcule sont correctes, la dirence avec la PVC tant quici les
variables (X
i
[x
i
), i C sont, comme pour un MLG standard, indpen-
dantes.
Plaons-nous dans le cadre du 5.4.2 et supposons que X vrie les condi-
tions (C13). Notons
(k)
i
, k = 1, 2, 3 les drives dordre k en de
i,
et
pour i C, posons :
Z
i
=
log
i
(X
i
, x
i
; )
(1)
,
I
i
(x
i
; ) = V ar
,x
i
(Z
i
) et I
C
n
() =
1
c
n
Cn
I
i
(x
i
; ).
204 5 Statistique des modles spatiaux
(N1) i S,
i,
est de classe (
3
(V ) en sur un voisinage de , et
1
i
,
(k)
i
,
k = 1, 2, 3 sont uniformment bornes en i, x
i
, x
i
et V .
(N2) I(), matrice p p symtrique dterministe d.p. telle que :
liminf
n
I
C
n
()
c
n
I() (5.29)
(5.29) est une condition de sous-ergodicit sur X. On a : X sur C. On a :
Thorme 5.6. Normalit de
C
n
et test de codage [97; 96]
Supposons que X soit un champ de Markov sur (S, () vriant les condi-
tions (C13) et (N1-2). Alors :
1. I
C
n
()
1/2
(
C
n
)
loi
^
p
(0, Id
p
).
2. Si = r(), R
q
, est une sous-hypothse (H
0
) de rang q de classe
(
2
(V ), alors :
2l
C
n
(
C
n
) l
C
n
(
C
n
)
loi
2
pq
sous (H
0
).
Commentaires :
1. Le premier rsultat dit que sous la condition de sous-ergodicit (5.29), les
rsultats du MV pour des observations i.i.d. se maintiennent en prenant
linformation de Fisher I
C
n
() conditionnelle x
C
. I
C
n
() peut tre estime
par I
n
(
C
n
) ou partir des variances empiriques de Monte Carlo sous
C
n
.
2. Pour vrier (5.29), on pourra utiliser le rsultat de minoration des
frquences empiriques du lemme 5.1 : (5.29) est satisfaite sil existe
V : R
p
tel que pour i C,
E
,x
i
(log
i
(1)
t
log
i
(1)
) V
t
V (x
i
) et
_
V
t
V (y)
(dy) est d.p..
3. La dmonstration suit la proposition C.2 de lAppendice C : ici,
0 =
c
n
U
(1)
n
() +
n
(,
C
n
)
c
n
(
C
n
) avec
c
n
U
(1)
n
() =
1
c
n
iCn
Z
i
.
Les variables Z
i
, i C tant centres, bornes et indpendantes condi-
tionnellement x
C
, on applique, sous (5.29), le TCL pour des variables
i.n.i.d. bornes [32, Th. 9.2]. Dautre part, on vrie que
n
(,
C
n
) +
I
C
n
()
P
0 et sous (N1), I
C
n
() J
C
n
(). La normalit asymptotique de
c
n
U
(1)
n
() jointe cette identit donne le rsultat annonc pour le test
de rapport de vraisemblance de codage.
4. Plusieurs choix de codage C de S sont possibles : par exemple, pour S = Z
2
et le graphe aux 4-ppv, C
+
= (i, j) : i + j pair et C
= (i, j) : i + j
impair sont deux codages maximaux. A chaque codage C correspond un
estimateur
C
n
, mais les estimateurs associs deux codages sont dpen-
dants.
5.4 Estimation dun champ de Markov 205
Exemple 5.11. Sous-ergodicit pour un champ dIsing inhomogne
Reprenons lexemple (5.9) dun modle dIsing inhomogne. Lnergie
conditionnelle en i C vaut
t
h
i
(x
i
, x
i
) o
h
i
(x
i
, x
i
) = x
i
_
u
i
v
i
_
et v
i
=
ji
w
ij
x
j
.
On vrie que I
C
n
() = c
1
n
iCn
V ar
, x
i
(X
i
(
ui
vi
)). Commenons par mino-
rer la variance conditionnelle de X
i
: notant p
i
(x
i
, ) = P
(X
i
= 1 [ x
i
),
il est facile de voir quil existe 0 < < 1/2 tel que, uniformment en i C,
x
i
et , p
i
(x
i
, ) 1 et donc V ar
,x
i
(X
i
) = 4(1 ) > 0.
Considrons alors un vecteur
t
(c, d) ,= 0, o c et d sont du mme signe ; quitte
omettre la contribution de certains sites, on a :
(c, d)I
C
n
()
t
(c, d)
iCn:vi=+1
(ca
i
+d)
2
c
n
. (5.30)
La frquence empirique sur C
n
de la conguration constante x
i
= 1 (qui
donne v
i
= +1) tant minore positivement pour n grand (cf. Lemme 5.1),
on en dduit que liminf
n
(c, d)I
C
n
()
t
(c, d) > 0 ; si c et d sont de signes
opposs, on obtient la mme minoration en remplaant
iCn:vi=+1
(ca
i
+d)
2
par
iCn:vi=1
(ca
i
d)
2
dans (5.30) : (5.29) est vrie.
Exemple 5.12. Test disotropie pour un modle dIsing
Soit X le modle dIsing sur Z
2
dnergie conditionnelle en (i, j),
(H) : h(x
i,j
, x
(i,j)
; ) = x
i,j
(h +
1
(x
i1,j
+x
i+1,j
) +
2
(x
i,j1
+x
i,j+1
)),
observ sur 1, 2, . . . , n
2
. Pour tester lisotropie (H
0
) :
1
=
2
, on utili-
sera la statistique de dirence de codage sur C = (i, j) : i + j est pair :
asymptotiquement, sous (H
0
), cette statistique suit un
2
1
.
Dautres exemples de tests de codage sont prsents lexercice 5.8.
Exemple 5.13. Modlisation dun essai blanc (suite de lexemple 1.12).
Examinons nouveau les donnes de Mercer et Hall donnant les rende-
ments en bl dun essai blanc sur un champ rectangulaire dcoup en 2025
parcelles rgulires. Lanalyse graphique pralable (cf. Fig. 1.10-b) suggrant
quil ny a pas deet ligne, on propose de modliser le rendement par une
rgression spatiale avec leet colonne comme seul eet moyen et un rsidu
CAR(L) stationnaire,
X
t
=
j
+
t
, t = (i, j),
t
=
sL(h)
c
s
t+s
+e
t
, V ar(e
t
) =
2
,
206 5 Statistique des modles spatiaux
Tableau 5.9. Donnes de Mercer et Hall : estimation par codage et par MV.
Codage (pair) Codage (impair) MV
c10 c01 l
C
n
c10 c01 l
C
n
c10 c01 ln
L(0) 104.092 116.998 488.046
Liso 0.196 69.352 0.204 88.209 0.205 525.872
L(1) 0.212 0.181 69.172 0.260 0.149 86.874 0.233 0.177 526.351
ceci pour les voisinages L(h) = (k, l) : 0 < [k[ + [l[ h de porte h = 0
(indpendance) et h = 1 (modle aux 4-ppv). On estime galement le modle
L
iso
(1) isotropique aux 4-ppv. Le Tableau 5.9 prsente les estimations par
codage et par MV des trois modles.
On teste ensuite L(0) dans L
iso
(1). Les deux tests (de codage, du MV )
de statistique T
a
n
= 2l
a
n
(
n,a
) l
a
n
(
n,C
) rejettent lindpendance (H
0
) au
niveau 5%. Les deux tests de L
iso
(1) dans L(1) acceptent lisotropie.
5.4.4 Prcisions compares du MV , MPV C et du codage
Sil est intuitif quon perde de linformation en passant du MV au MPV C
tout comme en passant du MPV C au Codage, la justication nest possible
que si on sait calculer les variances asymptotiques pour chacune des trois
mthodes. Cest possible si X est un modle dIsing ergodique [99] ou si X
est le champ gaussien markovien isotropique aux 2-d ppv sur Z
d
,
X
t
=
s:|st|
1
=1
X
s
+e
t
, [[ <
1
2d
. (5.31)
Retenons ce deuxime exemple : cette spcication est associ un unique
champ gaussien X ergodique et exponentiellement mlangeant (cf. B.2). Si
1
note la corrlation distance 1 et si X est observ sur le cube n points,
les prcisions asymptotiques des estimateurs du MV , de PV C et de Codage
de sont respectivement [26],
lim
n
(n V ar
MV
) =
1
2(2)
d
_
T
d
_
d
i=1
cos
i
1 2
d
i=1
cos
i
_
2
d
1
. . . d
d
,
lim
n
(n V ar
PMV
) =
_
2
2
(12d1)
2
2d
2
1
si ,= 0
1/d sinon
,
lim
n
(n V ar
C
) =
_
(12d1)
d1
si ,= 0
1/d sinon
,
lensemble de codage retenu tant C = i = (i
1
, i
2
, . . . , i
d
) Z
d
t.q. i
1
+
i
2
+. . . +i
d
pair. Le Tableau 5.10 donne, pour d = 2, les ecacits relatives
5.4 Estimation dun champ de Markov 207
Tableau 5.10. Ecacits relatives e1 = MV/Codage, e2 = MV/PMV et corrla-
tion 1 aux ppv pour le champ gaussien isotropique aux 4-ppv en fonction de .
4 0.0 0.1 0.2 0.3 0.4 0.6 0.8 0.9 0.95 0.99
1 0.0 0.03 0.05 0.08 0.11 0.17 0.27 0.35 0.60 0.73
e1 1.00 0.99 0.97 0.92 0.86 0.68 0.42 0.25 0.15 0.04
e2 1.00 1.00 0.99 0.97 0.95 0.87 0.71 0.56 0.42 0.19
Tableau 5.11. Ecacit e1(0) = MV/Codage pour un CAR isotropique aux -ppv
en situation dindpendance ( = 0) et pour dirents rseaux rguliers voisins.
Rseau rgulier S
1
e1
linaire 2 2 1
carr 4 2 1
carr+diagonales 8 4 1/2
triangulaire 6 3 2/3
hexagonal 3 2 1
cubique (corps) centr 8 2 1
cubique faces centres 12 4 1/2
ttradrique 4 2 1
cubique d-dimensionnel 2d 2 1
e
1
() = MV/codage et e
2
() = MV/PMV ainsi que la corrlation
1
() aux
ppv pour 0 < 1/2d Le Tableau 5.10 montre que la perte decacit du
PMV en comparaison du MV est faible si < 0.15 (rappelons que pour
d = 2, on doit imposer [[ < 0.25).
De faon annexe, on constate que la croissance de
1
() est dabord
lente, montant rapidement lorsque .25,
1
valant 0.85 pour (14) = .32
10
8
[20; 21]. Une explication de ce comportement est donne lexercice 1.17.
En situation dindpendance ( = 0), MV , PV C et Codage ont la mme
ecacit : si lgale ecacit du MV et du PMV sexplique facilement, lef-
cacit du codage est plus surprenante. En fait, e
1
(0) = 1 est propre aux
lattices rguliers dont la gomtrie permet un taux asymptotique de codage
optimal = lim
n
(C
n
/D
n
) = 1/2 : cest le cas pour Z
d
. Le Tableau 5.11 [27]
montre que, pour un modle CAR isotropique aux -ppv, X
i
=
i
X
j
+e
i
,
i S, [[ < 1/, sur un rseau rgulier, ceci nest plus vrai pour les graphes
taux de codage optimal < 1/2.
5.4.5 Identication du support dun champ de Markov
Lobjectif est didentier le support de voisinage L dun champ de Markov
de spcication locale
i
(x
i
[ x
i
) =
i
(x
i
[ x
i+L
) en utilisant un contraste
(n)-pnalis (cf. Appendice C, C.3). Si L
max
est un voisinage majorant, on
retiendra
L
n
qui minimise :
208 5 Statistique des modles spatiaux
L
n
= argmin
LLmax
_
U
n
(
L
) +
(n)
n
L
_
.
Nous prsentons ici deux rsultats.
Identication dun CAR gaussien sur Z
d
Soit L
max
un sous-ensemble ni de (Z
d
)
+
, le demi-espace positif de Z
d
muni
de lordre lexicographique, et, pour m = L
max
,
= c R
m
: [1 2
lLmax
c
l
cos(
t
l)] > 0 pour tout T
d
.
Si , les quations X
i
=
lLmax
c
l
(X
il
+X
i+l
) + e
i
avec E(e
i
X
j
) = 0
si i ,= j dnissent un CAR(L
max
). Supposons que le vrai modle soit un
CAR(L
0
) gaussien, L
0
L
max
. Si X est observ sur D
n
= 1, 2, . . . , n
d
,
utilisant pour U
n
le contraste gaussien de Whittle (cf. (5.13)), on a le rsultat
suivant : si
T log log(n) < (n) < n,
alors
L
n
= L
0
pour n grand si > 0 est assez petit et si T est assez grand, par
exemple si (n) = log(n) ou (n) =
n [102, Prop. 8]. De faon plus prcise,
Guyon et Yao [102] donneent un contrle des probabilits des deux ensembles
de mauvaise paramtrisation du modle, savoir lensemble de sur-ajustement
M
+
n
=
P
n
P
0
et celui de sous-ajustement M
n
=
P
n
P
0
.
Support dun champ de Markov nombre ni dtats
Pour L
max
Z
d
nie et symtrique, 0 / L
max
, considrons X un champ L
max
-
markovien despace dtats E ni et de spcication invariante par translation
appartenant la famille exponentielle (5.23). Pour (x, v) EE
Lmax
, notons
, h(x, v)) lnergie conditionnelle en 0, o R
m
et h =
t
(h
l
(x, v), l =
1, . . . , m) R
m
. On sait (cf. (5.24)) que si la matrice H = (h(x, v)) de colonnes
h(x, v), (x, v) EE
Lmax
, est de rang plein gal m, alors la paramtrisation
en est identiable. Supposons que le support de voisinage de X est L
0
L
max
. Considrant le contraste de log-pseudo vraisemblance conditionnelle
pnalis, on montre que si la vitesse de pnalisation vrie :
(n) et (n) < n
pour un > 0 assez petit, alors
L
n
= L
0
pour n grand [102, Prop. 9]. Signalons
que lidentication du support dun champ de Markov est galement tudie
dans [124; 52] ; [52] ne supposant pas connu le modle majorant L
max
.
5.4 Estimation dun champ de Markov 209
Fig. 5.14. (a) image satellitaire X de 4056 pixels de la rgion des Nebrodi (Sicile,
Italie) : parties cultives () et non cultives () ; (b) prdiction de X partir des
covariables de terrains incluant les auto-covariables de voisinage et laltitude DTM
(modle (5.34)) pour le paramtre estim par MV.
Exemple 5.14. Modlisation de la distribution spatiale de lutilisation dune
terre agricole
Les donnes tudies ici [5] proviennent dune image satellitaire de la r-
gion des Nebrodi (Sicile, Italie)
(cf. le site http ://stat.uibk.ac.at/smij). Limage (cf. Fig. 5.14) couvre une
surface de 2016 km
2
et se compose de 40 56 = 2240 pixels, chacun reprsen-
tant une parcelle au sol de 3030 m
2
. La variable de rponse considre ici est
binaire, X
s
= 1 (resp. X
s
= 0) reprant que la surface est cultive (resp. non
cultive). La partie cultive se compose de terres arables, dagrumes, doliviers
ou damandiers, alors que la partie non cultive reprsente des pturages, des
bois, de la vgtation spontane et tout autre terrain.
On dispose galement de covariables de terrain caractristiques de chaque
parcelle : la densit du sol (DS) en gramme centimtre cube, lpaisseur de la
couche de terre arable (HT) en centimtres, la pluviosit annuelle moyenne
(PM), la permabilit du sol en millimtres dans des conditions de saturation
(PC) et un modle numrique de terrain donnant laltitude en mtres (DTM)
de la parcelle. Le but de lanalyse est de dterminer si ces caractristiques de
terrain ont une inuence sur lutilisation du sol.
Pour cela, on va ajuster deux modles auto-logistiques, le premier aux 4-
ppv et le second aux 8-ppv, o, notant v
1
(x
i
) =
j:|ij|=1
x
j
et v
2
(x
i
) =
j:|ij|=
2
x
j
,
P(X
i
= 1[x
j
, j ,= i) = exp(
i
+
i
)/1 + exp(
i
+
i
),
avec :
i
=
0
+
1
DS
i
+
2
HT
i
+
3
PM
i
+
4
PC
i
+
5
DTM
i
et
i
=
6
v
1
(x
i
), (5.32)
210 5 Statistique des modles spatiaux
Tableau 5.12. Estimations du codage des modles auto-logistiques aux 4- ou aux
8-ppv expliquant la rpartition spatiale de lutilisation du sol.
Modle 5.32 Modle 5.33 Modle 5.34
C0 C1 C
0
C
1
C
2
C
3
C
0
C
1
C
2
C
0 0.361 7.029 0.829 0.888 1.508 13.413 1.998 5.221 0.223 5.643
e.t. 10.351 10.197 14.317 14.807 15.239 14.797 3.080 3.123 3.245 3.009
1 1.975 1.625 1.640 2.645 0.168 1.171
e.t. 1.691 1.647 2.419 2.213 2.742 2.301
2 0.069 0.045 0.039 0.077 0.020 0.038
e.t. 0.051 0.050 0.073 0.067 0.083 0.069
3 0.008 0.001 0.006 0.015 0.006 0.012
e.t. 0.018 0.018 0.026 0.026 0.027 0.026
4 1.360 1.418 1.658 2.461 0.165 0.969
e.t. 1.298 1.273 1.859 1.734 2.069 1.778
5 0.010 0.011 0.009 0.014 0.002 0.010 0.006 0.010 0.004 0.010
e.t. 0.004 0.004 0.005 0.006 0.006 0.005 0.004 0.004 0.004 0.003
6 1.303 1.203 1.150 0.851 1.254 1.015 1.139 0.873 1.248 1.024
e.t. 0.095 0.089 0.156 0.161 0.166 0.158 0.155 0.160 0.165 0.156
7 0.194 0.515 0.359 0.203 0.177 0.489 0.378 0.206
e.t. 0.155 0.166 0.154 0.159 0.153 0.159 0.152 0.157
ou encore,
i
=
6
v
1
(x
i
) +
7
v
2
(x
i
). (5.33)
Le modle (5.32) est lun des modles tudis par Alf et Postiglione [5].
On tudiera galement le modle dans lequel, outre les deux covariables de
voisinage, seule laltitude DTM est signicative dans les covariables de ter-
rains :
i
=
0
+
5
DTM
i
+
6
v
1
(x
i
) +
7
v
2
(x
i
). (5.34)
Les estimations de pour le Codage (cf. Tableau 5.12) comme pour le
maximum de PVC sont obtenues en utilisant la fonction glm dans R : en
eet, la minimisation du contraste associ chaque mthode correspond
la maximisation de la fonctionnelle de vraisemblance dun modle linaire
gnralis, le modle logistique auquel on a ajout une (resp. deux) covariable
de voisinage.
Pour le modle (5.32) (resp. (5.33)) deux (resp. quatre) codages sont pos-
sibles.
Les variances estimes V ar(
(k)
i
) pour chaque codage sont celles donnes
en sortie de la fonction glm : en eet, un contraste de Codage est associ
une vraisemblance (conditionnelle) exacte laquelle est associe linformation
de Fisher (conditionnelle). Dans le cas dun modle stationnaire, les variances
V ar(
(k)
i
) estiment de faon convergente les vraies valeurs.
Si un rsum de lestimation par codage est obtenu en prenant la moyenne
i
des estimations (
(k)
i
, k = 1, . . . , m) sur les dirents codages, il est
5.4 Estimation dun champ de Markov 211
important de noter que ces dirents estimateurs de codage ne sont pas ind-
pendants :
_
m
k=1
V ar(
(k)
i
)/m nest donc pas lcart-type de
i
.
Il y a trois procdures pour valuer les cart-types des estimateurs du
maximum de PVC : nous utilisons ici un bootstrap paramtrique, simulant m =
100 ralisations X
(i)
issues du modle sous
PV C
, en estimant les paramtres
(i)
pour chaque X
(i)
et en retenant la racine carre de la variance empirique
calcule sur ces 100 estimations.
Pour le MV, on a utilis lalgorithme de Newton-Raphson par chane de
Markov (cf. 5.5.6), la vraisemblance tant approche par N = 1000 simula-
tions X
(i)
issues dun modle sous lestimateur initial =
PV C
. Ce choix
doit tre reconsidr si les statistiques exhaustives simules T
(1)
, . . . , T
(1000)
ne contiennent pas dans leur enveloppe convexe la statistique observe T
obs
(dans ce cas, il ny a pas de solution lquation de MV). On peut alors
recommander de prendre la premire itration retourne par lalgorithme de
Newton-Raphson comme nouvelle valeur initiale et simuler nouveau des
champs X
(i)
sous . Lestimateur ainsi obtenu est celui suggr par Huang et
Ogata [115].
Le Tableau 5.13 donne les estimations des trois modles pour les trois
mthodes, codage (C), PVC et MV. Ces rsultats montrent que les deux
Tableau 5.13. Estimations (Codage, MPV et MV) des modles auto-logistiques
aux 4 ou aux 8-ppv expliquant la rpartition spatiale de lutilisation du sol. Les
valeurs entre parenthses gurent les carts types. La dernire ligne donne, pour le
modle (5.34), la qualit SSE des prdictions de X pour les 3 mthodes destimation.
Modle 5.32 Modle 5.33 Modle 5.34
C MPV MV C MPV MV C MPV MV
0 3.695 4.115 -5.140 3.715 3.086 -4.764 3.271 3.394 -0.614
e.t. 7.319 5.618 4.510 7.397 5.896 3.066 1.558 1.936 1.124
1 -1.800 -1.810 -1.230 -1.406 -1.495 -0.950
e.t. 1.196 0.972 0.670 1.213 1.048 0.721
2 0.057 0.057 0.039 0.043 0.047 0.029
e.t. 0.036 0.030 0.020 0.037 0.032 0.021
3 0.003 0.003 0.009 0.001 0.002 0.008
e.t. 0.013 0.009 0.007 0.013 0.010 0.005
4 1.389 1.387 0.897 1.231 1.279 0.660
e.t. 0.918 0.745 0.455 0.932 0.798 0.520
5 -0.010 -0.010 -0.005 -0.009 -0.009 -0.004 -0.007 -0.008 -0.003
e.t. 0.003 0.002 0.002 0.003 0.003 0.002 0.002 0.002 0.001
6 1.253 1.240 1.409 1.068 1.055 1.109 1.071 1.061 1.097
e.t. 0.067 0.092 0.090 0.080 0.142 0.128 0.079 0.099 0.123
7 0.318 0.303 0.294 0.313 0.308 0.319
e.t. 0.079 0.132 0.118 0.078 0.059 0.113
SSE 350.111 347.815 308.118
212 5 Statistique des modles spatiaux
paramtres auto-rgressifs du modle (5.33) aux 8-ppv sont signicatifs et
que parmi les covariables de terrain, seule laltitude est signicative. Une
slection de modle sur la base des valeurs des statistiques
a
/
_
V ar(
a
k
),
a = C, MPV, MV retient, pour chaque mthode, le modle (5.34).
Finalement, pour ce dernier modle, on compare les trois mthodes des-
timation par leurs qualits prdictives [226]. Utilisant lchantillonneur de
Gibbs, on simule m = 100 ralisations du champ X
(i)
sous =
et on note
m
k
le nombre de fois quau site k on observe X
(i)
k
= 1. Une estimation empi-
rique de la probabilit P(X
k
= 1) est p
k
= m
k
/m et la somme des carrs des
carts rsiduels SSE =
k
(X
k
p
k
)
2
est une mesure de lerreur de prdiction
sous lestimation
. On remarque que pour ce critre, le MV est meilleur que
le maximum de PVC, lui-mme meilleur que le codage.
5.5 Statistique pour un processus ponctuel spatial
5.5.1 Test dhomognit spatiale bas sur les quadrats
Supposons que x = x
i
, i = 1, . . . , n soit la ralisation dun PP sur une partie
A elle mme intrieure une fentre dobservation plus grande permettant
dliminer les eets du bord. La premire tape dune modlisation est de
tester lhypothse CSR :
(H
0
) X est un PPP homogne sur A.
Pour tester (H
0
), il existe diverses techniques dont : (i) les statistiques
bases sur les comptages par quadrats, lments dune partition de A [62; 48;
194] et (ii) les statistiques bases sur les distances entre paires de points de x
(cf. 5.5.3).
La fentre dobservation A tant partitionne en m quadrats disjoints A
i
,
i = 1, . . . , m, de mme mesure (A
i
) = , on relve le nombre de points
N
i
= n(A
i
) de x dans chaque A
i
et on considre la statistique :
Q =
m
i=1
(N
i
N)
2
N
avec N =
m
i=1
N
i
/m. Si X est un PP de Poisson homogne dintensit , les
N
i
sont des variables de Poisson indpendantes de moyenne et la loi de Q
est approxime par une loi
2
m1 dgrs de libert. Lapproximation est
juge raisonnable si E(N
i
) 1 et si m > 6 (Diggle [62]).
La Fig. 5.15 illustre la mthode pour les donnes finpines. On observe
Q
obs
= 46.70 et comme P(
2
15
> Q
obs
) 0, on rejette le caractre poissonnien
homogne de la distribution des pins.
Cette mthode peut tre tendue au test du caractre poissonien dune
distribution spatiale, sans hypothse dhomognit spatiale. Si X est un PPP
5.5 Statistique pour un processus ponctuel spatial 213
4 2 0 2 4
2
0
2
x
y
11 10 13 4
2 6 15 1
9 5 4 4
8 5 10 19
0
.
0
0
0
.
0
5
0
.
1
0
0
.
1
5
N
F
r
e
q
1 2 4 5 6 8 9 11 13 15 19
Fig. 5.15. Statistiques des 4 4 quadrats pour les pins nlandais (donnes
finpines). A gauche, les 16 quadrats est les comptages Ni associs ; droite, distri-
bution empirique des Ni (en trait plein) et distribution thorique de Poisson ajuste
(en pointill).
dintensit (, ), on estime par MV (cf. 5.5.2), puis les eectifs thoriques
par quadrat par N
i
(
) =
_
Ai
(u,
)du. La statistique du test dindpendance
spatiale devient,
Q =
m
i=1
(N
i
N
i
(
))
2
N
i
(
)
.
Si m est assez grand et si chaque N
i
(
) 1, la loi de (Qm)/2m est proche
dune gaussienne rduite sil y a indpendance spatiale.
5.5.2 Estimation de lintensit dun PP
Estimation dun modle paramtrique de PPP
Soit X un PP observ sur une partie compacte A de R
d
de mesure positive,
x = x
1
, . . . , x
n
sa ralisation n = n(A) points. Si X est stationnaire,
lintensit est estime par
=
n(A)
(A)
.
estime sans biais . De plus, si X est un PPP homogne, est lestimateur
du maximum de vraisemblance de .
Si X est ergodique (cf. B.1) et si (A
n
) est une suite croissante de convexes
borns telle que d(A
n
) , o d(A) = supr : B(, r) A est le diamtre
intrieur de A, alors
n
=
n(A
n
)
(A
n
)
, p.s. .
Les PPP homognes ainsi que les PP de Neyman-Scott drivant dun PPP
homogne sont homognes.
214 5 Statistique des modles spatiaux
Si X est un PPP inhomogne dintensit (; ) paramtre par , lesti-
mateur du MV de sobtient en maximisant la log-densit de X sur A (cf.
(3.5)) :
l
A
() =
xA
log (; ) +
_
A
1 (; )d. (5.35)
Si (; ) suit un modle log-linaire, la maximisation de l
A
() est ana-
logue celle de la log-vraisemblance dun modle linaire gnralis (cf.
aussi 5.5.5). Bradley et Turner [14] proposent dapproximer
_
A
(; )d par
m
j=1
(
j
; )w
j
pour des
j
A et des poids dintgration w
i
convenables,
ce qui conduit la log-vraisemblance approche,
l
A
()
xA
log (; )
m
j=1
(
j
; )w
j
. (5.36)
Si lensemble des
j
contient x A, (5.36) se rcrit,
l
A
()
m
j=1
y
j
log (
j
; ) (
j
; )w
j
, (5.37)
o y
j
= 1[
j
x A]/w
j
. Le terme de droite de (5.37) est formellement
quivalent la log-vraisemblance pondre par des poids w
j
pour des variables
de Poisson indpendantes de moyenne (
j
; ) et (5.37) est maximise en
utilisant un logiciel pour le MLG (cf. le package spatstat).
La consistance et la normalit asymptotique de cet estimateur du MV sont
tudies dans Rathbun et Cressie [179] et Kutoyants [135].
Prcisons le rsultat de Rathbun et Cressie. Soit X un PP de Poisson
inhomogne dintensit log-linaire,
log (; ) =
t
z(), R
p
,
les z() tant des covariables observables. Supposons dautre part que la suite
des domaines dobservation borns (A
n
) soit croissante vriant d(A
n
)
et :
(L1)
_
A
(; )d < pour tout le borelien A avec (A) < .
(L2) Il existe K < tel que ( S : max
1ip
[z
i
()[ > K) < .
(L3) La matrice M
n
=
_
An
z()z()
t
d est d.p. et vrie lim
n
M
1
n
= 0.
Alors
n
= argmax
l
An
() est consistant et pour n grand :
(
n
) ^
p
(0, I
n
()
1
) o I
n
=
_
An
z()
t
z() exp
t
z()d.
5.5 Statistique pour un processus ponctuel spatial 215
Estimation de lintensit dun PP
Sans faire dhypothse poissonnienne, Mller et Waagepetersen [160] pro-
posent de continuer utiliser la fonctionnelle l
A
() (5.35) pour estimer le pa-
ramtre dun modle de densit (; ) : l
A
() est une pseudo-vraisemblance
poissonnienne ou vraisemblance compose adapte lvaluation des para-
mtres dintensit.
Estimation non-paramtrique dune intensit
Lestimation non-paramtrique dune fonction dintensit x (x) est simi-
laire celle dune densit de probabilit. Diggle [62] propose lestimateur,
(x) =
1
K
(x)
n
i=1
1
d
k
_
x x
i
_
,
o k : R
d
R
+
est un noyau symtrique dintgrale gale 1, > 0 est un
paramtre de lissage et
K
(x) =
_
A
1
d
k
_
x
_
(d).
Le choix de est important et il est conseill dessayer direntes valeurs.
A linverse, le choix de k() lest moins, des choix classiques tant le noyau
gaussien k(x) = (2)
d/2
e
|x|
2
/2
ou le noyau dEpanechnikov k(x) = c(d)1
(|x| < 1)(1 |x|
2
).
La Fig. 5.16 donne la localisation de 514 rables dune fort du Michigan
(donne lansing du package spatstat). Ces donnes, recales dans un carr
unitaire, montrent une intensit non-constante. Cette intensit est estime
avec un noyau gaussien pour trois valeurs du paramtre de lissage, = 0.01,
0.05 et 0.1.
5.5.3 Estimation des caractristiques du second ordre
Estimation empirique des distributions aux ppv
Si X est un PP stationnaire, la distribution G() de la distance dun point
X au ppv de X est (cf. 3.5.2) :
G(h) = P
(d(, X) h), r 0.
Soit n le nombre des points de X dans A
h
= A : B(, h) A, le
h-intrieur de A, o B(, h) est la boule de centre et de rayon h, et h
i
la
distance dun point observ x
i
x, i = 1, n, son ppv dans x. Lestimateur
non paramtrique de G est sa fonction de rpartition empirique,
216 5 Statistique des modles spatiaux
y
Fig. 5.16. (a) localisations de 514 rables dune fort du Michigan. Estimations
non-paramtriques de lintensit avec : (b) = 0.01, (c) = 0.05 et (d) = 0.1.
G(h) =
1
n
n
i=1
1
(0,hi]
(h).
La distribution de la distance dun point courant R
d
au ppv de X est
F(h) = P(d(, X) h), h 0.
Pour estimer F, on commence par choisir, indpendamment de X, une grille
rgulire sur A
h
. Soit m le nombre des points de la grille et h
i
la distance
dun point de la grille son ppv dans X
A
, i = 1, m. Un estimateur non-
paramtrique de F est la fonction de rpartition empirique,
F(h) =
1
m
n
i=1
1
(0,h
i
]
(h).
5.5 Statistique pour un processus ponctuel spatial 217
Un estimateur non-paramtrique de lindicateur J du caractre poisson-
nien de X est donc :
J(h) =
1
G(h)
1
F(h)
si
F(h) < 1.
La premire colonne de la Fig. 5.17 donne lestimation de J pour les don-
nes ants de fourmilires, cells de cellules et finpines de pins (cf. Fig.
3.1-ac). Lhypothse poissonnienne est acceptable pour la rpartition des
fourmilires et rejete pour les deux autres, avec plus de rgularit pour les
cellules et moins pour les pins.
Un autre outil pour tester le caractre poissonnien dun PP utilise lesti-
mation de la fonction K.
Estimation non-paramtrique de la fonction K de Ripley
Commenons par proposer des estimateurs non-paramtriques du moment r-
duit dordre 2, la fonction / de Ripley ou de son extension. Cette fonction
tant dnie par (3.12), un estimateur naturel de
2
/(B) est, si X est homo-
gne dintensit et observ sur A :
/(B) =
1
(A)
,=
,XA
1
B
( ).
Cet estimateur sous-estime
2
/ car un point au bord de A a moins de voisins
dans A quun point intrieur. On peut limiter ce biais en largissant A, mais
ceci nest pas toujours possible. Une faon de dbiaiser cet estimateur est de
considrer [160] :
/
A
(B) =
,=
,XA
1
B
( )
(W
)
si (W
) > 0 o W
= +W est le -translat de W. En eet :
E
_
/
A
(B)
_
= E
,=
,X
1
B
( )1
A
()1
A
()
(W
W
)
=
_
1
B
( )1
A
()1
A
()
(W
)
2
(d d)
=
2
_ _
1
B
(u)1
A
()1
A
( +)
(W
W
+
)
d /(d)
=
2
_
1
B
()/(d) =
2
/(B).
Si X est un un PP isotropique sur R
2
, et si B = B(0, h) est la boule de
centre 0 et de rayon h, Ripley [184] propose lestimateur :
218 5 Statistique des modles spatiaux
0.00 0.02 0.04 0.06 0.08 0.10
0
.
6
0
.
8
1
.
0
1
.
2
1
.
4
1
.
6
h
^ J
(
h
)
0.00 0.05 0.10 0.15 0.20 0.25
0
.
0
1
0
0
.
0
0
5
0
.
0
0
0
0
.
0
0
5
h
^ L
(
h
)
h
(a)
0 2 4 6 8
1
2
3
4
5
h
J
(
h
)
^
0 5 10 15 20
3
.
0
2
.
5
2
.
0
1
.
5
1
.
0
0
.
5
0
.
0
h
L
(
h
)
h
^
(b)
0.0 0.2 0.4 0.6 0.8
0
.
5
0
.
6
0
.
7
0
.
8
0
.
9
1
.
0
h
J
(
h
)
^
0.0 0.5 1.0 1.5 2.0 2.5
0
.
0
0
0
.
0
5
0
.
1
0
0
.
1
5
0
.
2
0
h
L
(
h
)
h
^
(c)
Fig. 5.17. Deux rsums dordre 2 : gauche h
J(h) et droite h (
L(h) h),
pour les trois rpartitions spatiales ants, cells et finpines (cf. Fig. 3.1-ac). Si X
est un PPP homogne, L(h) h 0 et J 1.
5.5 Statistique pour un processus ponctuel spatial 219
K
A
(h) =
(A)
n(A)
,=
,XA
w(, )1[0 < | | < h],
o w(, )
1
est la proportion du primtre du cercle C(; | |) centr en
et passant par qui se trouve dans A. Cet estimateur est non-biais si h < h
o h
est le plus grand rayon r autorisant un cercle C(; r) centr en un A
et de bord coupant A. Par exemple, si A = [0, 1]
2
, h
=
2. En dimension
d = 2, on en dduit lestimation de L,
L(h) =
_
K(h)/.
Thorme 5.7. (Heinrich [111]) Soit X un PP ergodique et (A
n
) une suite
croissante de convexes borns de diamtres intrieurs vriant d(A
n
) .
Notons
k
n
(h) =
/
An
(B(0, h)) et k(h) = /(B(0, h)). Alors, pour tout h
0
x,
lim
n
sup
0hh0
k
n
(h) k(h)
= 0, p.s. .
Dmonstration : Par le thorme ergodique (cf. B.1), pour tous les h,
lim
n
k
n
(h) = k(h), p.s. .
Un argument du type Glivenko-Cantelli (cf. [55]) conduit au rsultat.
.
Tout comme un PP homogne, un PP non-homogne peut prsenter des
tendances lagrgation, la rgularit ou lindpendance. An didentier
ce comportement, Baddeley et al. [13] ont tendu la fonction K de Ripley aux
PP non-homognes stationnaires au second ordre pour la corrlation repon-
dre g (cf. 3.1), introduisant la fonction (cf. (3.14)) :
K
BMW
(h) =
1
(A)
E
,=
,X
1
||h]
()()
,
dont lestimateur empirique naturel est :
K
BMW
(h) =
1
(A)
,=
,XA
1
||h]
() ()
.
L aussi, une correction de leet de bord est possible.
Pour un PPP inhomogne et en dimension d = 2, on a encore :
K
BMW
(h) = h
2
. Ainsi, examinant
K
BMW
(h) h
2
, on pourra tester
lhypothse quun processus est un PPP inhomogne, tout comme la fonc-
tion K de Ripley permettait de tester lhypothse quun processus est PPP
homogne.
220 5 Statistique des modles spatiaux
Tests de Monte Carlo
En gnral, la loi des estimateurs prcdents, utiles pour construire des tests
ou des intervalles de conance, nest pas connue. Une procdure approche
passe partout utilise la simulation de Monte Carlo. Dcrivons lune de ces
procdures.
Supposons que x
A
soit la ralisation sur une fentre A de X, un PPP
homogne sur R
2
dintensit (hypothse (H
0
)). On veut construire un in-
tervalle de conance pour G(h), la fonction de rpartition de la distance dun
point de X au ppv, prise en h. Conditionnellement n = n(x), on simule m
ralisations indpendantes x
(i)
A
de X sur A, un PPP(
) dintensit
= n/(A)
et pour chaque x
(i)
A
on calcule
K
i
(h), i = 1, . . . , m. On approxime alors les
quantiles de
K(h) partir de la distribution empirique des
K
i
(h), i = 1, m.
Pour tester (H
0
), il restera comparer ces quantiles avec la statistique
K
0
(h)
calcule partir de lobservation x
A
. Si le calcul de
K est coteux , on choi-
sira m rduit, les enveloppes
K
inf
(h) = min
i
K
i
(h) et
K
sup
(h) = max
i
K
i
(h)
dnissant, sous (H
0
), lintervalle de conance au niveau 1 2/(m+ 1),
P(
K
0
(h) <
K
inf
(h)) = P(
K
0
(h) >
K
sup
(h))
1
m+ 1
,
avec galit si les valeurs
K
i
sont direntes. On pourra aussi reprsenter les
fonctions
K
inf
,
K
0
,
K
sup
et les comparer avec h
2
: si
K
0
est dans la bande
de conance [
K
inf
(h),
K
sup
(h)] : h 0, on conclura que X est un PPP
homogne.
Dautres fonctions tests du caractre poissonien peuvent tre utilises, par
exemple :
T = sup
h1hh2
[
K(h) h
2
[ ou T =
_
h3
0
(
J(h) 1)
2
dh,
les h
i
, i = 1, 2, 3 tant des rayons choisir. On comparera alors la valeur
T
0
= T(x
A
) obtenue pour lobservation x
A
avec lchantillon ordonn T
(1)
T
(2)
. . . T
(m)
obtenu en simulant m ralisations indpendantes x
(i)
A
de X :
une rgion de rejet bilatrale de niveau = 2k/(m+ 1) est
= T
0
T
(k)
T
0
T
(mk+1)
.
La premire colonne de la Fig. 5.17 donne lestimation de J pour les don-
nes ants de fourmilires, cells de cellules et finpines de pins (cf. Fig.
3.1-ac). Lhypothse poissonnienne est acceptable pour la rpartition des
fourmilires, rejete pour les deux autres, avec plus de rgularit pour les cel-
lules et moins pour les pins. Lanalyse de ces mmes donnes en utilisant
L
(cf. Fig. 5.17, deuxime colonne) conduit aux mmes conclusions.
Ces procdures de Monte Carlo stendent facilement dautres contextes
ainsi qu la validation dun modle gnral.
5.5 Statistique pour un processus ponctuel spatial 221
Exemple 5.15. Biodiversit dans la fort tropicale humide
On considre ici un jeu de donnes analys par Waagepetersen [220]
donnant la rpartition spatiale des 3,605 arbres de lespce Beilschmiedia
pendula Lauraceae dans la fort tropicale humide de Barro Colorado Island
(cf. Fig. 5.18-a).
La fort tropicale humide est caractrise par une formation vgtale ar-
bore haute et dense et un climat chaud et humide. Lune des questions est
de savoir si cette rpartition est lie laltitude (elev) et linclinaison du
sol (grad). Un premier modle considr est un PPP dintensit log-linaire
log (; ) =
t
z() avec z() =
t
(1, z
elev
(), z
grad
()). Les EMV des para-
mtres et leurs carts types sont, dans lordre, -8.559 (0.341), 0.021 (0.002)
Fig. 5.18. (a) positions des 3,605 arbres dune zone de la fort de Barro Colorado ;
covariables daltitude (elev, (b)) et dinclinaison du sol (grad (c)).
222 5 Statistique des modles spatiaux
0 20 40 60 80 100 120
0
1
0
0
0
0
2
0
0
0
0
3
0
0
0
0
4
0
0
0
0
5
0
0
0
0
h
K
(
h
)
Fig. 5.19. Fonction
KBMW estime (en trait continu) et enveloppes infrieure et
suprieure (en tirets) obtenues partir de 40 simulations (niveau de conance de la
bande 95%) dun PPP homogne de mme intensit estime.
et 5.841 (0.256). Ainsi, lvation et inclinaison sont signicatives, la densit
forestire augmentant avec lune et lautre de ces covariables. Quant lesti-
mation non-paramtrique de K
BMW
base sur (;
) (cf. Fig. (5.19)) :
K
BMW
(h) =
1
(A)
,=
,XA
1
||h]
(;
)(;
)
,
elle scarte signicativement de h
2
, celle dun PPP dintensit (;
). Ceci
remet en cause le modle PPP, soit au niveau du modle dintensit, soit au
niveau de lindpendance spatiale de la rpartition des arbres. Plus precise-
ment Waagepetersen [220] propose de modliser ces donnes avec un PP de
Neyman-Scott inhomogne.
Exemple 5.16. Dirence de rpartition spatiale suivant le genre dune espce
vgtale
Cet exemple est tir dune tude de Shea et al. [198] sur la rpartition
spatiale de la tulipe aquatique Nyssa aquatica suivant trois caractres (mle,
femelle ou immature), ceci dans trois parcelles marcageuses de dimension
5050 m
2
en Caroline du Sud (cf. donnes nyssa dans le site). Nous analysons
les donnes sur une seule parcelle pour le seul caractre genre (mle ou
femelle, cf. Fig. 5.20). La rpartition au hasard des mles et des femelles est
a priori juge optimale car elle rend la reproduction plus facile. Lagrgation
entre mles ou entre femelles peut sexpliquer quant elle par des besoins en
ressources dirents. La rpartition des deux genres peut sinterprter comme
celle dun PPM Y = (x
i
, m
i
) o m
i
est la variable binaire de genre.
Nous choisissons dvaluer lagrgation spatiale par lintermdiaire de la
fonction K de Ripley. Si la population des mles (1) et celle des femelles
(0) prsente la mme agrgation spatiale, alors D(h) = K
1
(h) K
0
(h) est
5.5 Statistique pour un processus ponctuel spatial 223
0 10 20 30 40 50
1
0
2
0
3
0
4
0
5
0
x
y
+
+
++ + +
+ +
+
+ +
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ +
+ +
+ + +
+ +
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
++
+
+
+
+
++
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ +
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ + +
0 2 4 6 8 10 12
6
0
4
0
2
0
0
2
0
4
0
h
D
(
h
)
^
(a) (b)
Fig. 5.20. (a) Rpartition spatiale de lespce Nyssa aquatica selon les caractres
mles () ou femelles (+) ; (b) estimation (en continu) de D(h) = K1(h) K2(h)
et enveloppes infrieure et suprieure (en tirets) obtenues partir de 40 simulations
(niveau de conance de la bande 95%).
identiquement nulle. Pour tester cette hypothse, on considre la statistique
D(h) =
K
1
(h)
K
0
(h). La distribution de
D, sous lhypothse nulle, tant
dicile obtenir, nous suivrons une approche de Monte Carlo conditionnelle
la superposition des localisations des mles et des femelles. Pour cela, on si-
mule k PPM Y
(j)
= (x
i
, m
(j)
i
), j = 1, k, o m
(j)
= (m
(j)
i
) est une permutation
alatoire des marques m = (m
i
) et on calcule
D
(j)
(h) =
K
(j)
1
(h)
K
(j)
0
(h).
Pour k = 40 simulations, les enveloppes de conance obtenues (cf. Fig. 5.20-b)
montrent que, en dehors du facteur de densit de population, la direnciation
sexuelle ne sexprime pas dans la rpartition spatiale.
5.5.4 Estimation dun modle parametrique de PP
Si X suit un modle paramtrique /() permettant le calcul de K
, on peut
estimer par MCO en minimisant, pour une puissance c > 0 et une porte
h
0
choisir,
D() =
_
h0
0
K(h)
c
K(h; )
c
2
dh. (5.38)
Diggle [62, p. 87] recommande le choix h
0
= 0.25 si A = [0, 1]
2
, c = 0.5 pour les
PP rguliers et c = 0.25 pour les PP prsentant des agrgats. Numriquement,
D() devra tre approche par une somme,
D
() =
k
i=1
w
i
K(h
i
)
c
K(h
i
; )
c
2
pour des poids w
i
convenables. Si la forme analytique de K
est inconnue,
on utilisera une approximation de Monte Carlo K
MC
() =
m
i=1
K
i
()/m en
224 5 Statistique des modles spatiaux
simulant m ralisations indpendantes x
(i)
A
de X sous le modle /() et en
calculant
K
i
() pour chaque i.
La consistance de cet estimateur de MCO a t tudie par Heinrich [111] si
X est ergodique. Guan et Sherman [95] tablissent la normalit asymptotique
des estimateurs sous une condition de mlange, condition satisfaite si X est
un PP de Neyman-Scott ou si X est un PP de Cox log-gaussien.
Exemple 5.17. Estimation et validation dun modle paramtrique
La Fig. 5.17-c des donnes finpines laisse penser que la rpartition X
prsente des agrgats. On propose donc de modliser X par un processus
de Neyman-Scott dont la position des parents est un PPP() homogne, le
nombre de descendants suivant une loi de Poisson de moyenne et la po-
sition dun descendant autour dun parent suivant une loi ^
2
(0,
2
I
2
). Les
paramtres sont estims en minimisant (5.38) avec h
0
= 2.5, c = 0.25, lint-
gration tant ralise sur une grille rgulire de 180 points. Pour ce modle,
la fonction K vaut :
K(h; ) = h
2
+
1
1
1 exp(h
2
/4
2
),
avec
1
= et
2
=
2
; on obtient = 1.875,
2
= 0.00944 et
=
n(x)/( (A)) = 0.672. On valide le modle par Bootstrap paramtrique
en simulant m = 40 ralisations dun PP de Neyman-Scott de paramtres
( ,
2
,
) : les enveloppes de conance (cf. Fig. 5.21) montrent que ce choix de
modle est raisonnable,
K
0
(h) tant dans la bande de conance pour h > 0.2.
0.0 0.5 1.0 1.5 2.0 2.5
0
.
1
0
0
.
0
0
0
.
0
5
0
.
1
0
0
.
1
5
0
.
2
0
h
L
(
h
)
h
^
0.0 0.5 1.0 1.5 2.0 2.5
0
.
1
0
.
0
0
.
1
0
.
2
0
.
3
0
.
4
h
L
(
h
)
h
^
(a) (b)
Fig. 5.21. Estimation de D(h) = L(h) h pour les donnes finpines (cf. Fig.
3.1-c) : en ligne continue (a, b), l estimation non-paramtrique de D; (b) en poin-
tills, lestimation paramtrique pour le modle de N-S. Ces estimations sont ensuite
compares aux enveloppes infrieure et suprieure (en tirets) obtenues partir de
40 simulations (niveau de conance de la bande 95%) : (a) dun PPP homogne de
mme intensit ; (b) dun processus de N-S aux paramtres estims.
5.5 Statistique pour un processus ponctuel spatial 225
5.5.5 Pseudo-vraisemblance conditionnelle dun PP
Dnition de la PVC et obtention de lestimateur par PVC
La notion de densit conditionnelle dun PP en un site nayant pas de sens,
il faut construire une nouvelle notion de pseudo-vraisemblance conditionnelle.
Intuitivement, celle-ci peut se dduire de celle dun champ sur un rseau de
la faon suivante [184] :
1. Pour une partition ne de S, on associe au PP le processus latticiel de
comptage sur chaque lment de la partition.
2. On dnit alors la PV C de ce processus de comptage.
3. On tudie la limite de cette PV C quand la partition tend vers 0.
La limite est identiable si la densit f
de X est hrditaire (cf. (3.6)) et
si f
est stable, c--d si :
c
et K
> 0 nis t.q. : x, f
(x) c
K
n(x)
.
Considrons alors une suite de partitions embotes de S, A
i,j
A
i1,j
, (S =
mi
j=1
A
i,j
, i = 1, 2, . . .), vriant, si
i
= max(A
i,j
), j = 1, m
i
,
m
i
, m
i
2
i
0 . (5.39)
Thorme 5.8. Pseudo-vraisemblance dun PP (Jensen-Meller, [121])
Notons
S
la mesure du PPP(1). Si la densit f
de X est hrditaire et
stable, alors, sous (5.39) :
lim
i
mi
j=1
f
(x
Ai,j
[x
S\Ai,j
) = exp(S)
(S, x)
(, x),
S
p.s.,
o
(, x) =
f
(x )
f
(x)
1f
(x) > 0 et
(A, x) =
_
A
(, x)d.
Si A B(R
d
), la PV C de X sur A est dnie par :
pl
A
(x, ) = exp
(A, x)
(, x). (5.40)
La PV C dun PP est proportionnelle au produit sur les sites x de la
ralisation de X des intensits conditionnelles de Papanglou. Si x
A
, la
dnition de
(, x) est inchange quand la densit jointe sur S est rempla-
ce par la densit conditionnelle f
(x
A
[x
S\A
). Cette remarque est importante
car on peut choisir de modliser un ensemble de points observs dans une
226 5 Statistique des modles spatiaux
fentre dobservation A sans prendre en considration ce qui se passe lex-
trieur ou bien conditionnellement SA, cette dernire approche vitant
les eets du bord.
Lestimateur du maximum de PV C sur S est une valeur
S
= argmax
pl
S
(x, ).
Si f
(x) = Z()
1
h(x) exp
t
v(x) appartient une famille exponentielle, la
PVC est concave, strictement si le modle est identiable en :
si ,=
0
,
S
(, x) :
(, x) ,=
0
(, x) > 0. (5.41)
Exemple 5.18. Processus de Strauss
Pour le PP de Strauss (3.9) de densit f
(x) = ()
n(x)
s(x)
, > 0,
[0, 1], lintensit conditionnelle et la PV C valent respectivement,
(, x) =
s(;x)
et
pl
S
(x, ) =
n(x)
s(x)
exp
_
_
S
s(,x)
d
_
,
o s(, x) =
n
i=1
1| x
i
| r.
Si min
i,=j
[x
i
x
j
[ > r, alors s(x) = 0 et la PV C est maximise quand
= 0. Autrement > 0 et on obtient (
, ) en rsolvant pl
(1)
S
(x,
) = 0,
c--d :
n(x) =
_
S
s(,x)
d et
x
s(, x) =
_
S
s(, x)
s(,x)
d.
Si > 1, on prend = 1 et
= n(x)/(S).
Lavantage de la PV C est dviter le calcul de la constante de normalisa-
tion dune densit jointe. Il reste cependant calculer le facteur
(S, x) =
_
S
(, x)d. Baddeley et Turner [14] proposent dapproximer lintgrale par :
log pl
S
(x, )
n(x)
i=1
log
(x
i
, xx
i
)
m
i=1
(u
j
, x)w
j
, (5.42)
o u
j
, j = 1, . . . , m sont des points de S et w
i
les poids associs la formule
dintgration. Si lensemble des u
j
contient x, (5.42) se rcrit,
log pl
S
(x, )
m
j=1
(y
j
log
j
)w
j
, (5.43)
o
j
=
(u
j
, xu
j
) si u
j
x,
j
=
(u
j
, x) sinon, y
j
= 1l[u
j
x]/w
j
. Le
terme de droite de (5.43) est analogue (5.37) et donc peut tre maximis en
utilisant un logiciel destimation des MLG.
5.5 Statistique pour un processus ponctuel spatial 227
Asymptotique pour la PVC dun PP de Gibbs
Consistance de lestimation par PVC
Si X est un PP observ sur une suite de fentres (S(n)), Jensen et Mller [121]
tablissent la consistance de lestimation par maximum de PVC si X est mar-
kovien de porte borne R (la porte dun potentiel est R si (x)=0 ds que
deux points de x sont distants de plus que R), de spcication conditionnelle
invariante par translation dans la famille exponentielle :
f
(x
S
[x
S
) =
1
Z(; x
S
)
,=yxS
zx
S
(y z) exp
t
(y z).
Dans cette criture, S est le R-voisinage de S, (x) 0, (x) R
k
, avec
(x) = 1 et (x) = 0 si x nest pas une clique. De plus, lune ou lautre des
conditions suivantes doit tre satisfaite :
(P1) x t.q. n(x) 2, (x) 1 et
t
(x) 0 pour au voisinage de la
vraie valeur .
(P2) N et K < t.q. si n(x) 2, (x) K, |(x)| K et n(x
Ai
) N,
o A
i
est une partition des borliens borns recouvrant S(n).
(P1) traduit que les interactions sont rpulsives ; (P2) permet de considrer
des potentiels attractifs mais pour un processus markovien du type noyau
dur.
Normalit asymptotique de lestimation par PVC
Utilisant une proprit de type dirence de martingale, Jensen et Knsch
[123] prouvent que, mme en situation de transition de phase, on a la normalit
asymptotique de lEPVC. Prcisons leurs conditions. Soit X un PP de Gibbs
interactions de paires, de porte borne R et de densit,
f
(x
S
[x
S
) =
1
Z(; x
S
)
exp
1
n(x
S
)
2
xi, xjxSx
S
(x
i
x
j
).
On associe X un processus latticiel X
= (X
i
), o X
i
= X S
i
, pour la
partition de R
d
=
iZ
d S
i
, o S
i
=
R(i+] 1/2, 1/2]
d
),
R > R. Si D
n
Z
d
est suite croissante tel que D
n
/D
n
0, avec D
n
= i D
n
[ j / D
n
:
[j i[ = 1, et si X est observ dans la fentre
iDnDn
S
i
, lestimation
est celle maximisant la pseudo-vraisemblance pl
S(n)
(x, ) de X calcule sur
S(n) =
iDn
S
i
.
On suppose que
2
> 0 et que lune ou lautre des deux conditions suivantes
sur est satisfaite :
(J1) 0 () < .
(J2) () = (||), o : R
+
R satisfait :
228 5 Statistique des modles spatiaux
1. (r) K pour K < , (r) = si 0 r < r
1
pour un r
1
> 0, et
() est de classe (
1
sauf en un nombre ni de points.
2. Pour tout > 0, la fonction
t
(r) exp(r) est borne.
3. Soit (r) k
0
,= 0 si r R, soit sa drive
t
(r) k
1
,= 0 si r R.
Si de plus X est stationnaire, Jensen et Knsch [123] montrent que :
J
1/2
n
()I
n
()(
n
)
loi
^(0, I
2
),
pour les matrices de pseudo-information,
I
n
() =
2
pl
S(n)
()
,
J
n
() =
iDn
]ji]1, jDn
pl
Si
()
t
_
pl
Sj
()
_
.
Mase [151] a tendu ces rsultats au cas dune PV du second ordre ainsi
quau cas des PPM.
5.5.6 Approximation Monte Carlo dune vraisemblance de Gibbs
Soit X un champ de Gibbs (ponctuel ou latticiel ) de loi P
de densit,
(x; ) = Z
1
()g(x; ),
o Z() =
_
g(x; )(dx) < . La pratique de lEMV est dicile si le calcul
de Z() lest. Tel est le cas pour un champ de Gibbs. Dcrivons une mthode
de Monte Carlo de calcul approch de Z(). Soit une valeur courante du
paramtre et une autre valeur xe du paramtre. On estime alors le
rapport :
Z()
Z()
= E
_
g(X; )
g(X; )
_
,
en utilisant la LFGN sous la loi (; ). Si on ne dispose pas dune simula-
tion exacte, on utilisera une mthode MCMC qui, comme lchantillonneur de
Gibbs ou lalgorithme de Metropolis-Hastings, nexige pas la connaissance de
Z(). Si x est la ralisation de X, une approximation MC du logarithme du
rapport de vraisemblance
l() =
f(x; )
f(x; )
=
Z()g(x; )
Z()g(x; )
,
est obtenue en eectuant N simulations de X sous ,
l
N
() = log
g(x; )
g(x; )
log
1
N
N
j=1
g(X
j
; )
g(X
j
; )
. (5.44)
5.5 Statistique pour un processus ponctuel spatial 229
Cette approximation converge vers l() si N , lchantillonnage par
importance disant que lapproximation est dautant meilleure que est proche
de . On obtient ainsi l
N
() et
N
, lapproximation MC de l() et de
,
lestimateur du MV . Si (x; ) = Z()
1
exp
t
v(x), (5.44) et sa drive
scrivent :
l
N
() =
t
( )v(x) log N log
N
j=1
exp
_
t
( )v(X
j
)
,
l
(1)
N
= v(x)
N
j=1
v(X
i
)w
N,,
(X
i
),
o w
N,,
(X
i
) = exp
t
( )v(X
i
)
N
j=1
exp[
t
( )v(X
j
)]
1
.
N
, la valeur maximisant l
N
(), dpend de lobservation x et des simu-
lations X
1
, . . . , X
N
sous . Mais on peut montrer que, pour N grand, si
est lestimateur exact du MV , lerreur de Monte Carlo e
N
=
N(
N
)
est approximativement normale [86]. Ainsi, pour un nombre N de simulations
important,
N
approche
. Un pas de la mthode de Newton-Raphson scrit,
k+1
=
k
[l
(2)
N
(
k
)]
1
v(x)
N
j=1
v(X
i
)
N
,
o
l
(2)
N
(
k
) =
N
j=1
v(X
i
)
t
v(X
i
)
N
N
j=1
v(X
i
)
N
t
j=1
v(X
i
)
N
.
En eet w
N,,
(X
i
) = 1/N si = et Cov(
) est estime par [l
(2)
N
(
k
)]
1
.
L approximation (5.44) tant dautant meilleure que est proche de , on
pourra faire dmarrer la procdure itrative de , lestimation du maximum
de PVC de .
Algorithme rcursif de calcul de lEMV
Penttinen [169] a appliqu la mthode de Newton-Raphson au cas dun pro-
cessus de Strauss. Dans le cas o le nombre n = n(x) de points de x est x et
si la densit appartient une famille exponentielle, Moyeed et Baddeley [162]
proposent de rsoudre lquation du MV, E
[v(X)] = v(x), par une mthode
dapproximation stochastique,
k+1
=
k
+a
k+1
[v(x) v(X
k+1
)] , (5.45)
o a
k
est une suite de nombres positifs telle que a
k
0 et X
k+1
f
k
(cf.
Younes [230] pour un champ de Gibbs latticiel et Duo [71] pour les proprits
gnrales de ces algorithmes). Si on ne dispose pas dune simulation exacte
de X
k
, on utilise une mthode MCMC, mthode qui entre dans la classe des
algorithmes stochastiques markoviens [23].
230 5 Statistique des modles spatiaux
Exemple 5.19. Processus de Strauss
Si n(x) = n est x, la densit en x = x
1
, x
2
, . . . , x
n
est proportionnelle
exps(x), avec = log . Lquation (5.45) devient
k+1
=
k
+a
k+1
[s(X
k+1
) s(x))] .
On peut coupler cette quation avec lalgorithme MCMC pour la simula-
tion de X
k
. Si X
k
= x, la transition vers X
k+1
= y est la suivante :
1. Supprimer un point x choisi uniformment dans x.
2. Gnrer avec une densit conditionnelle (x)
proportionnelle f((x) ) et retenir y = x) .
Cette transition est celle dun chantillonneur de Gibbs balayage ala-
toire sur les indices 1, . . . , n avec une densit conditionnelle (x) pro-
portionnelle f(x) ).
Proprits asymptotiques de lestimation du MV dun PP
Il y a peu de rsultats relatifs la consistance et la normalit asymptotique
de l EMV. Jensen [122] donne une rponse partielle la normalit asympto-
tique de lEMV lorsque X est PP interactions de paires de densit,
f
(x) =
1
Z()
exp
1
n(x)
2
i<j
(x
i
x
j
)
avec <
1
< ,
2
> 0, et dans lun ou lautre des cas suivants :
(J1) X est un processus de Markov potentiel de porte borne.
(J2) X est un processus noyau dur.
Alors, si X satisfait une condition de faible dpendance, lEMV de est
asymptotiquement normal.
Exemple 5.20. Modle expliquant la rpartition de pins
Les donnes swedishpines du package spatstat donnent la rpartition de
71 pins dune fort sudoise. Analyse par Ripley [185] en utilisant le modle
de Strauss,
f
(x) = c() exp
1
n(x) +
2
s(x),
o s(x) =
i<j
1(|x
i
x
j
| r), on complte ltude en estimant le rayon
dinteraction r par la valeur r maximisant le prol
pl
A
(r) = max
pl
A
(x, ; r)
de la pseudo-vraisemblance (cf. Fig. 5.22-a) : on trouve r = 7.5. Le maximum
de pseudo-vraisemblance (cf. Tableau 5.14) est ensuite calcul en utilisant
lapproximation (5.42). Pour le maximum de vraisemblance, on a considr
1000 simulations X
(i)
obtenues par lalgorithme de Metropolis -Hastings arrt
aprs 10000 itrations.
Finalement on a valid le modle en simulant 40 ralisations de X sous
f
MV
(cf. Fig. 5.22-b).
5.5 Statistique pour un processus ponctuel spatial 231
2 4 6 8 10 12 14
4
2
0
4
1
5
4
1
0
4
0
5
4
0
0
3
9
5
r
l
o
g
P
V
(
)
^
0 5 10 15 20
1
0
1
h
L
(
h
)
h
^
(a) (b)
Fig. 5.22. Estimation et validation du modle de Strauss pour la rpartition des 71
pins : (a) prol en r de la pseudo-vraisemblance ; (b) estimation non-paramtrique
de L(h) h =
_
K(h)/ h (ligne continue) compare aux enveloppes infrieure et
suprieure (en pointills) obtenues partir de 40 simulations dun modle de Strauss
de paramtres
1 = 3.794,
2 = 1.266 et r = 7.5.
Tableau 5.14. Estimation du maximum de PVC et du MV du modle de Strauss
(pour r = 7.5) expliquant la localisation de 71 pins dans une fort sudoise. Les
valeurs entre parenthses gurent les carts types. Les carts types pour le maximum
de PVC sont calculs par bootstrap paramtrique en simulant 1000 ralisations.
1
2
PVC -3.937 -1.245
(0.211) (0.286)
MV -3.760 -1.311
(0.252) (0.321)
5.5.7 Rsidus dun processus ponctuel
Rcemment, Baddeley et al. [16] ont dni les h-rsidus dun PP de Gibbs
pour toute fonctionnelle test h : E R dnie sur lespace des ralisations.
Ces rsidus sont particulirement utiles la validation de modle. Nous en
prsentons brivement la dnition et les proprits et invitons le lecteur se
reporter [16] pour une prsentation approfondie.
La dnition de ces rsidus sappuie sur la reprsentation intgrale (3.17)
dun PP de Gibbs dont lintensit de Papangelou est (, x). Pour un choix
de h, dnissons la h-innovation sur une partie B par :
I(B, h, ) =
xB
h(, x)
_
B
h(, x)(, x)d, B S.
Si h dpend du modle, h devra tre estime pralablement au calcul du rsidu.
232 5 Statistique des modles spatiaux
Baddeley et al. [16] examinent le cas particulier de trois fonctions h, h=1,
h = 1/ h = 1/
qui donnent respectivement les innovations brutes,
-inverse et de Pearson :
I(B, 1, ) = N(B)
_
B
(, x)d;
I(B,
1
, ) =
xB
1
(, x)
_
B
1[(, x) > 0]d;
I(B,
1
, ) =
xB
1
_
(, x)
_
B
_
(, x)d.
En sappuyant sur (3.17), on vrie que I(B, h, ) est centre. Si X est un
PPP inhomogne dintensit (), alors (, x) = () et la variance de ces
innovations vaut :
V ar(I(B, 1, )) =
_
B
()d,
V ar
_
I(B,
1
, )
_
=
_
B
1
()
d et V ar
_
I(B,
1
, )
_
= [B[.
Notons que la premire quation gale la moyenne la variance de N(B).
Si
h et
estiment h et , les h-rsidus sont dnis par :
R(B,
h,
) =
xB
h(, x)
_
B
h(, x)
(, x)d, B S.
Comme pour un modle linaire standard (avec intercept) o la somme
des rsidus est zro, on a une proprit de centrage pour les rsidus bruts
R(B, 1, ) = N(x B) [B[ dun PPP homogne dintensit : si est
estim par MV, = N(x)/[S[ et R(S, 1, ) = 0.
Lutilisation des rsidus -inverse a t propose par Stoyan et Grabarnik
[203] et les rsidus de Pearson sont dnis en analogie avec les modles de
rgression log-linaire de Poisson.
De faon similaire, on peut dnir innovations et rsidus en remplaant
lintensit de Papanglou par lintensit du PP, ceci pour toute fonction
test h() telle que
_
S
h()()d < .
Lexemple qui suit prsente quelques outils graphiques utiles la valida-
tion dun modle. Lheuristique derrire ces outils repose sur le paralllisme
existant entre le logarithme de la vraisemblance dun modle de rgression log-
linaire pour des variables de Poisson et la version discrtise du logarithme
de la pseudo-vraisemblance dun PP de Gibbs (cf. (5.43) et (5.37)).
5.5 Statistique pour un processus ponctuel spatial 233
Exemple 5.21. Rpartition des cellules ganglionnaires de la rtine dun chat
La Fig. 5.23-a (donnes betacells de spatstat) reprsente la localisation
des cellules ganglionnaires du type beta de la rtine dun chat. Les cellules
ganglionnaires sont sensibles des contrastes de lumire, certaines rpondant
lorsque le signal est un spot de lumire entour dun pourtour sombre (cellule
on), dautres la situation inverse (centre sombre sur fond clair, cellule o ).
La fentre dobservation est un rectangle [0, 1000] [0, 753.3] m
2
.
Une analyse de van Lieshout et Baddeley [218] montre quil y a rpul-
sion entre les cellules dun mme type et que les deux congurations on et
o sont indpendantes. Supposons alors que les localisations sont issues du
mme processus que lon cherche modliser. Comme pour un modle linaire
standard, un outil de diagnostic utilise le graphique des rsidus (en ordonne)
0 200 400 600 800
0
2
0
0
4
0
0
6
0
0
8
0
0
1
0
0
0
x
y
+
+
+
+ +
+
+ +
+
+ +
+
+ +
+
+
+ +
+ +
+ +
+
+ +
+
+ + + +
+
+
+ + + + + +
+ + +
+ + +
+
+ +
+ + + +
+ +
+ +
+
+
+ +
+
+
+ + +
+
0 200 400 600 800 1000
5
0
0
0
5
0
0
y
c
u
m
u
l
a
t
i
v
e
p
e
a
r
s
o
n
r
e
s
i
d
u
a
l
s
(a) (b)
0 200 400 600 800
5
0
0
0
5
0
0
1
0
0
0
x
c
u
m
u
l
a
t
i
v
e
p
e
a
r
s
o
n
r
e
s
i
d
u
a
l
s
0 200 400 600 800
4
0
0
2
0
0
0
2
0
0
4
0
0
x
c
u
m
u
l
a
t
i
v
e
p
e
a
r
s
o
n
r
e
s
i
d
u
a
l
s
(c) (d)
Fig. 5.23. (a) Rpartition spatiale des cellules ganglionnaires on (+) et o () de
la rtine dun chat ; graphiques de diagnostic : (b) en y et (c) en x pour le modle
PPP homogne ; (d) pour le modle PPP inhomogne (5.46). Les lignes en pointills
sont les enveloppes de conance C(v) 2
_
V ar(C(v)).
234 5 Statistique des modles spatiaux
en fonction dune covariable spatiale observable ou dune coordonne spa-
tiale du site dobservation (en abcisse). Chaque fois quun motif apparat
dans le graphique, cest une indication que le modle est inadapt. Associe
une covariable spatiale u(), B, dnissons le sous-ensemble de niveau
B(v) = B : u() v et associons la fonction cumulative des rsidus :
C(v) = R(B(v),
h,
), v R.
Si le modle est correctement spci, C(v) est approximativement gal 0.
Les Figs. 5.23-b et c donnent respectivement les courbes de diagnostic des
rsidus de Pearson obtenus pour lestimation dun PPP homogne en fonction
des coordonnes y et x. Les enveloppes de conance C(v)2
_
V ar(C(v)) sont
calcules partir de lapproximation V ar(C(v)) V ar(I(B(v),
h,
),
h et
tant estimes sous lhypothse que X est un PPP. La sortie de lenveloppe
pour la courbe relative x suggre lexistence dune tendance spatiale en x.
Lestimation dun deuxime modle de PPP inhomogne dintensit
(; ) = exp
1
+
2
x
, =
t
(x
, y
), (5.46)
amliore les rsultats (cf. Fig. 5.23-d).
Un deuxime outil de diagnostic est donn par le champ des rsidus lisss
(cf. Fig. 5.24) :
l(, x) =
xix
k( x
i
)
h(x
i
, xx
i
)
_
S
k( )
(, x)
h(, x)d
_
S
k( )d
,
o k est un noyau de lissage et le dnominateur un facteur de normalisation.
Dans le cas des rsidus bruts, lesprance de l(, x) est proportionelle
_
S
k(
)E[(, X)
(, X)]d : des valeurs positives (resp. ngatives) suggrent
Fig. 5.24. Champ des rsidus bruts lisss pour : (a) le modle de PPP homogne ;
(b) le modle de PPP inhomogne (5.46).
5.6 Modle hirarchique spatial et statistique baysienne 235
0.006 0.004 0.002 0.000 0.002 0.004 0.006
0
.
0
0
4
0
.
0
0
2
0
.
0
0
0
0
.
0
0
2
0
.
0
0
4
Mean quantile of simulations
Residuals: pearson
d
a
t
a
q
u
a
n
t
i
l
e
0.010
0
.
0
0
5
0
.
0
0
0
0
.
0
0
5
Mean quantile of simulations
Residuals: pearson
d
a
t
a
q
u
a
n
t
i
l
e
0.005 0.000 0.005 0.010
(a) (b)
Fig. 5.25. Q-Q plot des rsidus de Pearson pour : (a) le modle de PPP inhomogne
(5.46) ; (b) le modle de Strauss (5.47).
que le modle sous-estime (resp. surestime) la fonction dintensit. La Fig.
5.24-a montre que le PPP homogne est inadquat et que le modle de PPP
inhomogne est prfrable (cf. Fig. 5.24-b).
Le graphique Q-Q plot est un outil suggr par Baddeley et al. [16] pour
valider la composante dinteraction dun PP. Pour cela, on simule m rali-
sations x
(i)
, i = 1, . . . , m, du modle estim. Pour une grille de points
j
,
j = 1, J, et pour chaque ralisation x
(i)
, i = 0, m (avec x
(0)
= x), on calcule
les rsidus lisss l
(i)
j
= l(
j
, x
(i)
) et lchantillon ordonn l
(i)
[1]
. . . l
(i)
[J]
. Les
quantiles observs l
(0)
[j]
sont compars avec les moyennes des quantiles simu-
ls
m
i=1
l
(i)
[j]
/m. Si le modle est bien adapt, les deux quantits sont peu
prs gales. La Fig. 5.25 donne le Q-Q plot pour deux modles dirents :
le modle de PPP inhomogne prcdant et le modle de Strauss dintensit
conditionnelle :
(, x; ) = exp
1
+
2
x
+
3
xix
1(| x
i
| r), =
t
(
1
,
2
,
3
). (5.47)
Le rayon dinteraction r = 74 a t identi au point o le prol de la PVC
est maximum. La Fig. 5.25 invalide le modle de PPP inhomogne et valide
le modle de Strauss.
5.6 Modle hirarchique spatial et statistique baysienne
Etant donnes trois variables alatoires U, V et W, on peut toujours dcom-
poser la loi jointe dun triplet (U, V, W) par conditionnements successifs,
[U, V, W] = [W[U, V ][V [U][U],
236 5 Statistique des modles spatiaux
o [a] dnote la loi de la variable a. Cette dcomposition est la base de la
modlisation hirarchique.
Si le processus dintrt X est non-observ et si les observations Y sont
formes partir de X, on considre le modle hirarchique :
[Y, X,
Y
,
X
] = [Y [X,
Y
,
X
][X[
X
][
Y
,
X
].
Dans cette dcomposition, il y a trois niveaux de hirarchie. Au niveau 1, on
spcie comment se forment les observations Y partir de X en prcisant la
loi de Y conditionnelle au processus dintrt X et aux paramtres de modle
(
Y
,
X
). Le niveau 2 prcise la loi du processus dintrt X conditionnel aux
paramtres (
X
). Quant au niveau 3, il spcie lincertitude sur les paramtres
(
Y
,
X
). Cette faon de faire confre une certaine souplesse de modlisation
qui permet dincorporer la fois lincertitude et les connaissances a priori
sur le phnomne observ. Cette souplesse jointe au dveloppement des m-
thodes numriques MCMC rendent utiles et populaires les modles baysiens
spatiaux.
Lapproche la plus courante, que nous suivrons ici, suppose que les obser-
vations Y =
t
(Y
s1
, . . . , Y
sn
) soient, conditionnellement aux X, indpendantes,
[Y [X,
Y
,
X
] =
n
i=1
[Y
si
[X,
Y
,
X
],
la loi de X tant celle dun processus spatial. Selon le contexte, X est un signal
(une image, une forme, des covariables) non-observ que lon veut extraire (re-
construire) partir des observations Y . Comme en reconstruction baysienne
dimage (cf. [82]), on apportera une information sur X sous la forme dune loi
a priori sur X.
Linfrence baysienne pour ce type de modle est oriente vers lobten-
tion des direntes distributions a posteriori [X[Y ], [
Y
[Y ] et des distributions
prdictives [Y
s
[Y ] lorsque le site s nest pas observ. Gnralement, la spci-
cation analytique de ces lois est impossible et cest la structure conditionnelle
du modle hirarchique qui permettra leur valuation empirique par mthode
de Monte Carlo et algorithme MCMC (cf. Ch. 4).
Notre objectif ici nest pas de donner un traitement gnral de ces modles
mais den esquisser une description partir de deux exemples : le krigeage
baysien pour une rgression spatiale et lanalyse baysienne dun MLG
prsentant un eet alatoire spatial. Nous renvoyons le lecteur au livre de
Banerjee et al. [18] pour une approche approfondie des modles hirarchiques
spatiaux et [187] et [68] pour une prsentation de la statistique baysienne
en gnral.
5.6.1 Rgression spatiale et krigeage baysien
Considrons une rgression avec une composante spatiale alatoire X,
Y
si
=
t
z
si
+X
si
+
si
, i = 1, . . . , n, R
p
, (5.48)
5.6 Modle hirarchique spatial et statistique baysienne 237
o X = X
s
est un champ gaussien non-observ, centr. Nous supposerons
pour simplier que X est stationnaire de covariance c(h) =
2
(h, ) et que
=
s
est un BBG de variance
2
, une erreur locale mesurant la variabilit
micro-chelle (cf. galement (1.31) pour dautres choix de ).
Les deux premiers niveaux du modle (5.48) sont spcis par :
[Y [X,
Y
,
X
] = ^
n
(Z +X,
2
I) et [X[
X
] = ^
n
(0,
2
R()),
pour la matrice de corrlation R() = ((s
i
s
j
, ))
i,j=1,n
.
Retenir des lois gaussiennes a priori sur les paramtres permet un calcul
analytique explicite des distributions a posteriori et des distributions prdic-
tives sans recourir des simulations MCMC (on parle alors de lois conju-
gues, cf. [187; 68]). Supposons par exemple que
2
, ,
2
soient connus et
que ^
p
(
). Dans ce cas, la loi de conditionnelle Y est :
[[Y,
2
, ,
2
] = ^
p
(
),
o
= (
1
+
t
Z
1
Z)
1
(
1
+
t
Z
1
Y ),
= (
1
+
t
Z
1
Z)
1
et
=
2
R() +
2
I. Quant la loi prdictive de Y
s
en un site s non-observ,
elle est donne par :
[Y
s
[Y,
2
, ,
2
] =
_
[Y
s
[Y, ,
2
, ,
2
][[Y,
2
, ,
2
]d.
Si (Y
s
, X
s
)[,
2
, ,
2
est un processus gaussien, la formule du krigeage
universel (1.36) donne :
[Y
s
[Y, ,
2
, ,
2
] = ^(
Y
s
,
2
Ys
), avec :
Y
s
=
t
z
s
+
t
c
1
(Y Z
), c = Cov(X
s
, X) et
2
Ys
=
2
t
c
1
c +
t
(z
s
t
Z
1
c)(
t
Z
1
Z)
1
(z
s
t
Z
1
c).
On en dduit que [Y
s
[Y,
2
, ,
2
] est gaussienne de moyenne et de variance :
= (
t
z
s
t
c
1
Z)(
1
+
t
Z
1
Z)
1
+
_
t
c
1
+ (
t
z
s
t
c
1
Z)(
1
+
t
Z
1
Z)
1 t
Z
1
Y,
2
=
2
t
c
1
c
+(
t
z
s
t
c
1
Z)(
1
+
t
Z
1
Z)
1 t
(
t
z
s
t
c
1
Z).
On remarque que pour une loi a priori peu informative sur le paramtre
(
kI pour k grand), ces formules sont celles du krigeage universel (faire
= 0).
238 5 Statistique des modles spatiaux
5.6.2 Modle linaire gnralis hirarchique spatial
Le modle (5.48) prsent au paragraphe prcdent nest pas adapt des
donnes non-continues (comptage de malades dans une rgion, franchissement
dun seuil pour un niveau de pollution, variable binaire de prsence/absence)
ou encore des donnes continues prsentant de fortes asymtries (donnes
extrmes de pluie). Lextension naturelle consiste proposer des modles li-
naires gnraliss non-gaussiens (cf. [155]).
Etudiant des donnes gostatistiques, Diggle et al. [64] suggrent de consi-
drer le MLG,
f(y
si
[X
si
, , ) = exp
_
y
si
si
b(
si
)
+c(y
si
, )
_
, i = 1, . . . , n,
(5.49)
avec b
t
(
si
) = E(Y
si
[X
si
, , ), et, pour une fonction de lien g ( choisir),
g(E(Y
si
[X
si
, , )) =
t
z
si
+X
si
. (5.50)
Dautres spcications sont possibles (cf. [38]). Les quations (5.49) et (5.50)
caractrisent le premier niveau du modle hirarchique. Au deuxime niveau,
on supposera que X
s
est un processus gaussien centr stationnaire de cova-
riance c(h) =
2
(h, ).
A la lecture des modles linaires (5.48) ou non-linaires (5.50), on com-
prend pourquoi lintroduction deets alatoires spatiaux X sur la moyenne
(la moyenne transforme) induit une liaison signicative entre les moyennes
conditionnelles des (Y
si
[X
si
) en des sites voisins sans pour autant induire une
corrlation entre ces variables. En ce sens, les modlisations hirarchiques spa-
tiales se distinguent signicativement des auto-modles markoviens spatiaux
qui induisent des corrlations spatiales.
Gnralement, les lois a posteriori et les lois prdictives ne sont pas calcu-
lables analytiquement. Il faut alors utiliser un algorithme MCMC exploitant la
structure conditionnelle hirarchique du modle pour valuer empiriquement
ces lois. Sans entrer dans le dtail du choix des lois de proposition de change-
ment retenues (cf. [64] et [44] pour des adaptations des modles spciques),
dcrivons un algorithme de Metropolis associ au traitement du modle (5.49).
Le symbole signiant proportionnel , on va utiliser les identits :
[
2
, [Y, X, ] [X[
2
, ][
2
, ],
[X
si
[Y, X
sj
, ,
2
, ; s
j
,= s
i
] [Y [X, ][X
si
[X
sj
;
2
, , s
j
,= s
i
] =
n
i=1
[Y
si
[X
si
, ][X
si
[X
sj
;
2
, , s
j
,= s
i
],
[[Y, X, , s
j
,= s
i
] [Y [X, ][] =
n
i=1
[Y
si
[X
si
, ][].
5.6 Modle hirarchique spatial et statistique baysienne 239
Une itration de lalgorithme de Metropolis de simulation de ((
2
, ), X, [ Y )
est donne par les trois pas suivants :
1. Pour (
2
, ) pour les valeurs initiales
2t
,
t
.
(a) Proposer
2tt
,
tt
chacun selon des lois uniformes
indpendantes
(b) Accepter
2tt
,
tt
avec la probabilit :
r(X, (
2
t
,
t
), (
2
tt
,
tt
)) = min
_
1,
[X[
2
tt
,
tt
]
[X[
2
t
,
t
]
_
.
2. Pour X pour i = 1, n,
(a) Proposer X
tt
si
tir selon la loi [X
si
[X
t
sj
;
2
, , s
j
,=s
i
] (ceci re-
vient simuler une gaussienne conditionnelle par krigeage simple
(cf. (1.35)).
(b) accepter X
tt
si
avec une probabilit,
r(X
si
t
, X
si
tt
, Y ; ) = min
_
1,
[Y
si
[X
si
tt
, ]
[Y
si
[X
si
t
, ]
_
.
3. Pour pour la valeur initiale
t
,
(a) Proposer
tt
selon une loi [
tt
[
t
].
(b) Accepter
tt
avec une probabilit,
r(
t
,
tt
) = min
_
1,
n
i=1
[Y
si
[X
si
,
tt
][
t
[
tt
]
n
i=1
[Y
si
[X
si
,
t
][
tt
[
t
]
_
.
Les valeurs initiales
2
, , sont choisies compatibles avec les lois a
priori. Quant aux valeurs initiales X
si
, i = 1, . . . , n, on pourra choisir
X
si
= g(Y
si
)
t
z
si
pour i = 1, . . . , n.
Lvaluation de la distribution prdictive de X
s
en un site s non-observ
ncessite un pas supplmentaire : puisque [X
s
[Y, X, ,
2
, ] = [X
s
[X,
2
, ],
on simule une loi gaussienne conditionnelle dont la moyenne est calcule par
krigeage simple au site s, ceci pour les valeurs X
(k)
,
2(k)
et
(k)
obtenues une
fois que lalgorithme est entr en rgime stationnaire.
Exemple 5.22. Rpartition spatiale dune espce animale
Ltude de la rpartition spatiale dune espce animale peut servir me-
surer linuence de lactivit humaine sur lenvironnement. Les donnes pr-
sentes ici proviennent dune tude de Strathford et Robinson [205] visant
dterminer quels sont les paramtres du paysage pouvant expliquer la fr-
quentation dune rgion par une espce migratrice doiseaux, les Indigo Bun-
ting. Quatre facteurs dutilisation des sols, mesurs au voisinage des sites de
240 5 Statistique des modles spatiaux
* * *
*
*
** * * * **
*
*
* *
* * * * * *
* *
*
* * **
* * * *
** * *
*
*
** *
*
**
* * *
*
*
*
*
** *
*
*
**
*
* ****
**
* * *
* *
* * * * * * * *
*
*
* * * * * * * * * *
***
*
**
*
* * ** * *
* * ** * * * *
* * **
* *
* * * * *
** * *
* * * * *
*
*
*
* * *
* * * * * * ** * ** * * * * *
* ** * * * * * ** *
*
* * * *
* *
* *
*
*
* *
**
** * ** * * *
* *
*
*
* *
*
* *
* * *
*
*
****
**
* * * * * * * *
*
* ** * **
*
*
** **** * * *
* * *
* * *
*
* * *
* * * * * * * * * * * * * * * * * * * * *
*
* *
*
* * * * *** * * * * * * * * *
* * * * * * *
* *
*
* *
* *
* *
*
*
*
**
** *
**
* * *
* ** * *
**
* *
* * * *
*
*
* * * ***
*
* * *
**
** * * * * * **
*
*
*
* *
**
*
*
* *
*
*
*
* * ****
* * ** * *
*
* *
*
* * * * * * * *
* *
*
*
** * * * * * * * * * * * **
* * * * * * *
* * * * * ** * * ** **
* * * *
*
*
* ** * * * * * *
*
**
**
*
**
* ** * ** * * * **
* *
* * ** *** ** *
* *
* *
*
* * ** *
* * **
** * * * * *
* * * ** * **
* *
**
** * *
*** *
** * *
* *
85.1 85.0 84.9 84.8 84.7 84.6
3
2
.
4
3
2
.
6
3
2
.
8
3
3
.
0
longitude
l
a
t
i
t
u
d
e
1
2
3
Fig. 5.26. Sites dobservations des oiseaux. Les 3 sites sont ceux qui nous avons
retenu pour la prvision, le site 1 tant celui o le plus grand nombre doiseaux a
t observ.
comptage, sont retenus : bois (not M), parcs ouverts, prairies et ptures (G),
forts primaires (T), surfaces impermables (routes, maisons, parking ; U). Le
plan dchantillonnage est donn par la Fig. 5.26.
Une modlisation hirarchique considre que le nombre doiseaux Y
s
en s
est une variable de Poisson conditionnelle aux facteurs observs (G, M, T, U)
et un processus spatial non-observ X :
[Y
s
[, X
s
] = T(
s
),
o
s
=
1
+
2
G
s
+
3
M
s
+
4
T
s
+
5
U
s
+X
s
et X est un processus gaussien centr et isotropique, de covariance
c(h) =
2
exp|h|/,
2
> 0 et > 0 inconnus. Les lois a priori pour et
2
sont choisies non-
informatives, c--d de grandes variances, et indpendantes ; une analyse pra-
lable retient pour celle de la loi uniforme sur [0.03, 0.20]. Pour obtenir les
distributions a posteriori et prvisionnelles, on a utilis lalgorithme MCMC
du package geoRglm avec un temps de stationnarisation de 1000 itrations
pour chaque simulation, utilisant 50000 simulations pour les estimations avec
un sous-chantillonnage tous les 50 pas. Les estimations donnes la Fig. 5.27
montrent que tous les facteurs sols sont signicatifs tout comme leet spa-
tial, mme si ce dernier nest pas important.
Nous prsentons galement les lois des prvisions en trois sites 1, 2 et 3, le
site 1 tant le site o le nombre doiseaux observs est maximum. On constate
sur la Fig. 5.28 que le modle capte bien la possible absence doiseaux mais
mal les grands eectifs (comme au site 1).
5.6 Modle hirarchique spatial et statistique baysienne 241
GK
D
e
n
s
i
t
y
3 2 1 0 1
0
.
0
0
.
1
0
.
2
0
.
3
0
.
4
0
.
5
0
.
6
MK
D
e
n
s
i
t
y
5 4 3 2 1 0
0
.
0
0
.
1
0
.
2
0
.
3
0
.
4
0
.
5
TK
D
e
n
s
i
t
y
0 1 2 3 4 5 6
0
.
0
0
.
1
0
.
2
0
.
3
0
.
4
0
.
5
UK
D
e
n
s
i
t
y
6 4 2 0
0
.
0
0
0
.
0
5
0
.
1
0
0
.
1
5
0
.
2
0
0
.
2
5
0
.
3
0
2
D
e
n
s
it
y
0.5 1.0 1.5 2.0 2.5
0
.
0
0
.
2
0
.
4
0
.
6
0
.
8
1
.
0
D
e
n
s
i
t
y
0.05 0.10 0.15 0.20
0
5
1
0
1
5
2
0
Fig. 5.27. Estimation des lois a posteriori pour les paramtres G, M, T , U ainsi
que
2
et .
0
.
0
0
0
.
0
5
0
.
1
0
0
.
1
5
0
.
2
0
0
.
2
5
0
.
3
0
site 1
p
r
o
b
0 1 2 3 4 5 6 7 8 9 11
0
.
0
0
.
1
0
.
2
0
.
3
0
.
4
site 2
p
r
o
b
0 1 2 3 4 5 6 7 8
0
.
0
0
0
.
0
5
0
.
1
0
0
.
1
5
0
.
2
0
0
.
2
5
0
.
3
0
site 3
p
r
o
b
0 1 2 3 4 5 6 7 8 9 11 13 16
Fig. 5.28. Estimation des lois prdictives du nombre doiseaux aux trois sites 1, 2
et 3. Le correspond la valeur observe.
Le MLG (5.49) est bien adapt pour le traitement de donnes sur rseau
dans des contextes varis : pidmiologie (structure spatiale des maladies),
traitement dimage (reconstruction), cologie (rpartition despces).
Examinons un exemple pidmiologique, celui de ltude des variations
spatiales du risque dune maladie rare, une hypothse raisonnable tant que
des zones voisines ont tendance avoir des risques semblables car ces zones
partagent des facteurs de risque communs.
Au premier niveau, on modlise le nombre de cas (Y
i
) de la maladie dans
les rgions (i) par des variables de Poisson indpendantes,
Y
i
T(
i
E
i
),
242 5 Statistique des modles spatiaux
E
i
tant le nombre de cas attendus dans la rgion i, nombre calcul prla-
blement partir de covariables socio-dmographiques connues pour chaque
rgion. On pourrait galement utiliser pour Y
i
un modle binomial dont lef-
fectif maximum est la taille u
i
de la population de la rgion i. Le paramtre
i
, le risque relatif spcique la zone i, est inconnu et fait lobjet de ltude.
Lestimateur du maximum de vraisemblance de
i
,
i
= Y
i
/E
i
, qui ne tient
pas compte de la structure spatiale, a une variabilit proportionnelle 1/E
i
.
A un deuxime niveau, le paramtre
i
intgrera soit lhtrognit spa-
tiale, soit la dpendance spatiale. Examinons le modle propos par Besag
et al. [28] : le paramtre
i
de la rgression poissonnienne rpond un modle
log-linaire,
log(
i
) =
i
+
p
k=1
k
x
ik
+
i
, (5.51)
pour des eets alatoires
i
et
i
dinterprtations direntes et des covariables
(x
k
) observables :
- Les
i
^(0, 1/
2
) sont i.i.d. et reprsentent une composante dhtro-
gnit spatiale non-structure.
- Au contraire, les (
i
, i S) suivent un modle spatial structur, par
exemple un CAR gaussien intrinsque,
L(
i
[
i
) ^(i)
1
ji
j
, (
2
i)
1
.
Dans cette criture,
2
> 0 est un paramtre contrlant le lissage spatial des ,
donc des (
i
). Ce modle est identiable si les exognes x nincluent pas la
constante ; sinon, on ajoute la contrainte
iS
i
= 0.
Enn, un troisime niveau, on modlise
2
et
2
par des lois a priori
soit Gamma, soit
2
avec des hyperparamtres xs. Cette formulation mar-
kovienne conditionnelle rend alors possible lutilisation dalgorithmes MCMC.
Dans ce modle, les paramtres
2
et
2
qui caractrisent la dpendance
spatiale ont un eet global qui peut masquer dventuelles discontinuits du
fait dun lissage spatial trop fort. Cest la raison pour laquelle Green et
Richardson [93] dveloppent un modle qui remplace le champ CAR par des
partitions de Potts (2.5) qui permettent dintgrer des discontinuits spatiales.
Exemple 5.23. Cancer du poumon en Toscane (Italie)
Les donnes prsentes ici (cf. http://stat.uibk.ac.at/smij) sont is-
sues dune tude pidmiologique de Cattelan et al. [39] sur le cancer du
poumon chez les hommes rsidant dans lune des 287 municipalits de Toscane
(Italie) ns entre 1925 et 1935 et dcds entre 1971 et 1999. Un objectif de
ltude tait de voir si le risque de cancer est li lenvironnement et au mode
de vie. On note Y
i
le nombre de dcs observs dans la municipalit i et E
i
le nombre attendu de dcs. La rpartition spatiale du risque est estim par
5.6 Modle hirarchique spatial et statistique baysienne 243
R
i
= Y
i
/E
i
, le taux de mortalit standardis, estimation du MV du modle
log-linaire de rgression poissonnienne pour des variables indpendantes de
paramtres R
i
inconnus,
Y
i
T(
i
), (5.52)
log(
i
) = log(R
i
) + log(E
i
). (5.53)
La Fig. 5.29-a montre des estimations plus leves dans le Nord et le Sud-
Ouest mais il subsiste beaucoup de uctuations.
Ces uctuations peuvent tre dues des htrognits locales lies len-
vironnement et au mode de vie : on les modlise alors par un modle eets
alatoires,
log(
i
) =
i
+
1
+
i
+ log(E
i
), (5.54)
< 0.65
0.65 0.93
0.93 1.19
1.19 1.46
> 1.46
< 0.65
0.65 0.93
0.93 1.19
1.19 1.46
> 1.46
(a) (b)
< 0.84
0.84 0.27
0.27 0.18
0.18 0.88
> 0.88
< 0.65
0.65 0.93
0.93 1.19
1.19 1.46
> 1.46
(c) (d)
Fig. 5.29. (a) Rpartition spatiale du taux de mortalit standardis du cancer du
poumon dans les 287 municipalits de Toscane (Italie) ; (b) risques mdians a poste-
riori estims selon le modle (5.53) ; (c) rpartition spatiale de lindice dinstruction
en 1951 ; (d) risques mdians a posteriori selon le modle (5.54) incluant lindice de
scolarisation.
244 5 Statistique des modles spatiaux
les
i
^(0, 1/
2
), i.i.d., reprsentant une composante dhtrognit spa-
tiale non-structure et les (
i
, i S) suivant un modle CAR gaussien in-
trinsque (5.51) avec la contrainte
iS
i
= 0. Finalement on modlise
1
par une loi gaussienne centre de variance 100000
2
et
2
et
2
par des lois a
priori Gamma de paramtres 0.5 et 0.0005, valeurs correspondant des lois
non-informatives.
Pour ce modle, les distributions a posteriori marginales des paramtres
dintrt ont t approximes par algorithme MCMC. Pour cela, nous avons
utilis lchantillonneur de Gibbs du logiciel OpenBUGS [212], la version open
source de WinBUGS [146] ainsi que linterface R2WinBUGS [209] qui permet
deectuer lalgorithme MCMC dans lenvironnement R. Pour contrler la
convergence de lchantillonneur de Gibbs, nous avons utilis deux chanes in-
dpendantes et la procdure suggre par Gelman et Rubin [80] telle quelle est
dcrite au 4.5.2, le temps de stationnarisation tant de 2000 itrations pour
chaque simulation, chaque estimation utilisant 8000 simulations. La Fig. 5.29-
b montre clairement leet de lissage que ralise le modle (5.54).
Modle avec covariables : parmi les indicateurs du mode de vie, celui qui
a t retenu ici est lindice de scolarisation (education score) ED
i
, quotient
du nombre dhabitants illettrs sur le nombre de personnes sachant lire mais
nayant pas le certicat dtudes ; plus cet indice est grand, plus faible est
le degr de scolarisation. On suppose dautre part quil ny a pas de risque
dexposition au cancer jusqu 20 ans, la variable de mortalit tant associe
la covariable ED retarde de 20 ans et issue du recensement de 1951.
La Fig. 5.29-c donne la rpartition spatiale de lindice ED : il est clair que
les niveaux de scolarisation plus levs de la rgion Nord-ouest correspondent
des rgions dindustrialisation plus ancienne o le taux de mortalit est plus
lev. Cependant la corrlation empirique entre
R
i
et ED
i
, qui vaut -0.20,
reste faible.
On considre alors le modle log-linaire intgrant la covariable ED,
log(
i
) =
i
+
1
+
2
ED
i
+
i
+ log(E
i
), (5.55)
o
2
suit une loi gaussienne centre de variance 100000. Les rsultats (cf.
Fig. 5.29-d) obtenus par la mthode MCMC montrent des risques mdians a
posteriori moins lisses et plus ralistes que ceux donns par le modle (5.53) :
lestimation du paramtre
2
(cf. Fig. 5.30) montre une association ngative
entre le taux de mortalit pour cancer du poumon et le niveau dducation.
Exercices
5.1. Potentiels de rtention.
Le jeu de donnes potentiels (voir le site) est issu dune exprience dans
laquelle on sature en eau des chantillons de sols prlevs dans une zone S, on
les sature ensuite en eau 3 pressions direntes et on mesure les potentiels
5.6 Modle hirarchique spatial et statistique baysienne 245
0.05 0.10 0.15
0
5
1
0
1
5
2
0
1
0.20 0.15 0.10 0.05 0.00
0
5
1
0
1
5
2
Fig. 5.30. Estimations MCMC des lois a posteriori des paramtres 1 et 2 dans
le modle (5.55).
de rtention (W5, W200, W1500). Pour chaque chantillon on dispose aussi des
fractions granulomtriques pour des classes correspondantes largile et
quatre types de limon du n au plus grossier (ARG, LF, F3, F4.5, F6.7). La
modlisation vise lier les variables de fonctionnement (potentiel de rtention)
avec des variables dtat de la porosit (granulomtrie), les secondes tant
faciles observer. On considre dabord la variable W1500.
1. Estimer empiriquement le variogramme pour direntes directions.
2. Corriger lventuelle anisotropie en introduisant les covariables granulo-
mtriques.
3. Proposer des modles de variogramme et les estimer. Slectionner un mo-
dle laide dun critre AIC gaussien.
4. Proposer des mthodes pour dessiner la carte du potentiel de rtention.
5. Y-a-til des dirences entre les potentiels mesurs 3 pressions di-
rentes ?
5.2. Sur lindice de Moran.
On observe la ralisation (4, 2, 4, 0, 1, 3) de X sur lensemble S =
1, 2, . . . , 6 muni du graphe symtrique 10 artes ( = 1, 2), 1, 3), 1, 4),
1, 6), 2, 3), 3, 6), 2, 6), 3, 4), 4, 5), 5, 6). Calculer lindice de Moran I
M
pour les poids w
i,j
= 1 si i, j), w
i,j
= 0 sinon. Calculer la moyenne et la
variance de I
M
pour la loi permutationnelle. Comparer avec les rsultats de
lapproximation normale.
246 5 Statistique des modles spatiaux
5.3. Calcul de E(I
M
) et V ar(I
M
) sous hypothse gaussienne.
1. Soit X = (X
1
, X
2
, . . . , X
n
) un n-chantillon ^(,
2
) et Z
i
= X
i
X
pour i = 1, . . . , n. Vrier que pour des indices i, j, k, l tous dirents :
E(Z
i
) = 0, E(Z
2
i
) =
_
1
1
n
_
2
, E(Z
i
Z
j
) =
2
n
,
E(Z
2
i
Z
2
j
) =
n
2
2n + 3
n
2
2
, E(Z
2
i
Z
j
Z
k
) =
n 3
n
2
4
, E(Z
i
Z
j
Z
k
Z
l
) =
3
n
2
4
.
2. Utilisant le rsultat de la proposition 5.5, en dduire lesprance et la
variance de lindice de Moran sous hypothse dindpendance.
3. On suppose que X est un chantillon mais on ne fait pas dhypothse sur
la loi commune des X
i
. Dmontrer que, notant E
P
lesprance pour la loi
permutationnelle,
E
P
(Z
i
) = 0, E
P
(Z
2
i
) = m
2
=
1
n
n
i=1
z
2
i
, E
P
(Z
i
Z
j
) =
m
2
n 1
, si i ,= j.
En dduire que
E
P
(I
M
n
) =
1
n 1
.
5.4. Loi limite de lindice de Moran.
Dterminer la loi asymptotique de lindice de Moran sous lhypothse dind-
pendance pour des poids w
i,j
= 1 si i, j), w
i,j
= 0 sinon et pour les graphes
suivants :
1. S = Z
2
et la relation aux 4-p.p.v. (resp. aux 8-p.p.v.).
2. S est le rseau triangulaire rgulier de R
2
et la relation aux 6-p.p.v.
3. S = Z
d
et la relation aux 2d-p.p.v.
5.5. Test de factorisation dune covariance.
Soit X un CAR gaussien, centr, stationnaire et aux 8-ppv sur Z
2
.
1. Expliciter ce modle et le sous-modle (F) covariance factorisante.
2. X est observ sur le carr de ct n. Ecrire les quations du MV et du
PMV pour chaque modle. Tester (F). Dterminer sous (F) la loi asymp-
totique de
= n( r
00
r
11
r
10
r
01
)
2
+ ( r
00
r
1,1
r
1,0
r
01
)
2
.
5.6. Estimation dun modle CAR aux 4-ppv.
X est un CAR gaussien centr, stationnaire, aux 4-ppv, de paramtre =
(, ,
2
), o
2
est la variance rsiduelle conditionnelle, [[ + [[ < 1/2. X
est observ sur le carr de ct n.
5.6 Modle hirarchique spatial et statistique baysienne 247
1. Prciser la loi asymptotique de lestimateur du MV (resp. du MPVC) de
si les donnes sont convenablement rabotes au bord. Tester lisotropie.
2. Mme question si Y = X + o est BBG(
2
) indpendant de X.
5.7. Modlisations auto-logistiques de la rpartition spatiale dune
espce vgtale.
A On observe la prsence (X
s
= 1) ou labsence (X
s
= 0) dune espce vg-
tale, la grande lache (ou carex) dans un terrain marcageux subdivis en
un rseau rgulier de 24 24 parcelles (cf. donnes laiche dans le site).
On veut ajuster les modles auto-logistiques invariants par translation
suivants : (i) aux 8 ppv (5 paramtres) ; (ii) aux 4 ppv (3 paramtres) ;
(iii) aux 4 ppv isotropique (2 paramtres).
1. Estimer ces modles (paramtres et leurs variances) par MV, MPVC
et Codage. Tester lisotropie aux 4 ppv dans le modle aux 8 ppv en
utilisant la dviance de la vraisemblance et un test de
2
de codage.
Tester cette mme isotropie dans le modle aux 4 ppv.
2. Quel modle retiendriez-vous en utilisant le contraste de la PVC p-
nalis la vitesse
n (pour n observations) ?
B Wu et Huer [226] ont tudi la rpartition spatiale de prsence/absence
despces vgtales en fonction de covariables climatiques sur un domaine
S ayant n = 1845 sites, sous-ensemble dun rseau 68 60 rgulier (cf.
donnes castanea dans le site). Les 9 covariables sont : TMM (temp-
rature annuelle minimum, en degr Celsius), TM (temprature moyenne
du mois le plus froid), TAV (temprature moyenne annuelle), LT (tem-
prature minimale sur la priode 19311990), FZF (nombre de jours avec
gele), PRCP (prcipitations annuelles en mm), MI (indice annuel dhu-
midit moyenne), PMIN (prcipitations moyennes des mois secs) et ELV
(altitude, en pieds).
1. Dresser la carte du rseau S ainsi que celle de la prsence/absence de
lespce Castanea pumila.
On va tudier les modles de rgression/auto-rgression sur les cova-
riables climatiques x
i
et lendogne aux 4 ppv, v
i
=
ji
y
j
:
P(Y
i
= 1 [ y
i
, x) =
exp
i
1 + exp
i
,
o
i
= a +
t
x
i
b +cv
i
.
2. Ajuster la rgression logistique sur les seules covariables climatiques
x
i
. Utilisant le critre AIC, quelles covariables retiendriez-vous ?
3. Ajuster le modle de rgression/auto-rgression logistique complet par
MV, PVC et Codage. La covariable de voisinage v est-elle signica-
tive ? Utilisant la log-PVC pnalise, quelles covariables climatiques
retenir ? (constatez que la prise en compte de la variable de voisinage
simplie signicativement le modle).
248 5 Statistique des modles spatiaux
4. On retient le modle 3- avec TAM, PR et MI et v comme seules
covariables. An de comparer les estimations par MV, PVC et Codage,
Wu et Huer proposent de mesurer la distance DMA =
i
[y
i
y
i
[
entre les observations y et leurs prdictions y obtenues pour chaque
estimation ( y
i
est la moyenne empirique en i des ralisations dun
chantillonneur de Gibbs la valeur estime du paramtre). Comparer
la qualit prdictive des trois mthodes destimation.
5.8. Quelques tests du
2
de codage.
X est un champ de Markov de spcication invariante par translation sur
S = 0, 1, . . . , n 1
2
Z
2
.
1. Dcrire le test disotropie si X est le modle dIsing aux 4-ppv.
2. Un modle isotropique K tats E = 1, 2, . . . , K et aux 4-ppv a pour
nergie conditionnelle en i, si x
i
= k :
h
i
(k, x
i
) =
k
+
l:l,=k
kl
n
i
(l),
o n
i
(l) =
ji
1(X
j
= l).
On impose les conditions didentiabilit :
K
= 0, pour k ,= l,
kl
=
lk
et pour tout l,
Kl
= 0. Dcrire le test dchangeabilit (E) :
kl
est
constant sur tout les k ,= l.
3. Soit X un champ V -markovien K tats, de spcication invariante par
translation, o V = 0 Z
2
est nie et symtrique, 0 / V .
(a) Ecrire le modle gnral de X (faire un choix de V et de K).
(b) Dcrire les sous-modles suivants : (a) les cliques ont au plus 2 points ;
(b) le modle est isotropique ; (c) : (a)(b) ; (d) le modle est auto-
binomial sur E = 0, 1, . . . , K 1.
(c) Proposer des tests de ces sous-modles dans le modle gnral.
5.9. Estimation dune dynamique de champ de Markov.
Soit X = (X(t), t N), X(t) = (X
i
(t), i S) 0, 1
S
, une dynamique sur
S = 1, 2, . . . , n modlise par une chane de Markov homogne et ergodique.
La transition x y de cette dynamique est dnie par :
p(x, y; ) = Z
1
(x, ) exp U(x, y, ), avec
U(x, y; ) =
n
i=1
y
i
x
i
+(x
i1
+x
i+1
) +(y
i1
+y
i+1
).
1. Calculer les lois conditionnelles L(X
i
(t) [ x
i
(t), x(t 1)). En dduire la
PVC associe.
2. Pour un choix de rseau S et de , simuler la dynamique sur T instants
successifs, puis estimer par PV C.
5.6 Modle hirarchique spatial et statistique baysienne 249
5.10. Un modle markovien de croissance de tache.
Un modle de croissance de taches spcie la donne dune suite croissante
A = A(t), t = 0, 1, 2, . . . de parties nies de Z
2
. Une dynamique markovienne
peut tre caractrise par la loi de la tache initiale A(0) ,= et les transitions
de Markov P(a(t1), a(t)) pour t 1. La dynamique est aux ppv si a(t1)
a(t) a(t) a(t 1), o B est la frontire aux ppv de B. La dynamique
aux ppv est locale et indpendante si la transition vrie :
P(a(t 1), a(t)) =
ia(t1)
P(a
i
(t 1), a
i
(t)).
1. Proposer une dynamique markovienne aux ppv. La simuler pour une tache
a(0) donne. Ecrire la PV C du modle.
2. Mme question pour une dynamique locale et indpendante. Dmontrer
la convergence de lestimation par PV C et donner sa vitesse.
3. Tester quune dynamique markovienne aux ppv est locale et indpendante.
5.11. Indpendance de 2 caractres spatiaux.
(U
i
, V
i
) 0, 1
2
sont 2 caractres binaires observs sur S = 1, 2, . . . , n
2
.
Le modle est markovien isotropique aux 4-ppv et invariant par translation.
1. Vrier que le modle gnral est 12 paramtres, de potentiels de sin-
gletons et de paires :
1
(u, v) = u +v +uv,
2
((u, v), (w, t)) =
1
uw +
2
vt +
3
ut +
4
vw +
5
uwt +
6
vwt
+
7
uvw +
8
uvt +
9
uvwt.
2. Spcier et tester le sous-modle dindpendance de U et V .
3. Soit () le sous-modle o, dans
2
, seuls
1
et
2
sont non-nuls. Dter-
miner les lois conditionnelles
i
(u
i
, v
i
[ ) et
i
(u
i
[ ), le conditionnement
portant sur toutes les autres observations. Construire le test du
2
de
codage de la sous-hypothse dindpendance de U et de V sur la base des
lois conditionnelles
i
( [ ).
5.12. Rgression spatiale gaussienne.
On considre le modle de rgression spatiale gaussienne Z = X + , Z et
R
n
, R
p
, o est le modle SAR :
(I W) = ,
o BBG(
2
).
Identier la matrice dinformation J
p+2
() de = (,
2
, ). Mme ques-
tion si est un modle CAR.
250 5 Statistique des modles spatiaux
5.13. Plan dexprience sur un champ alatoire.
p traitements deets moyens =
t
(
1
,
2
, . . . ,
p
) sont appliqus, chacun r
fois, sur les n = r p parcelles dun champ S = 1, 2, . . . , n. On observe Y ,
de moyenne D o D est la matrice n p de placement des traitements (D
vrie :
t
DD = rI
p
). On suppose que le processus des rsidus X = Y D
est un modle CAR spatial :
X = WX +e,
o W
ij
= 1 si [i j[ = 1, et W
ij
= 0 sinon.
1. Estimer par MCO. En dduire une estimation
X des rsidus.
2. Estimer par MC conditionnel sur la base de
X.
3. En dduire lestimation des MCG(
) de . Interprter.
5.14. Rpartition spatiale ponctuelle des cas de leucmie chez
lenfant.
Une question importante en pidmiologie spatiale est de savoir si la rparti-
tion spatiale dindividus malades (cas) est la mme ou non que celle de la po-
pulation risque (contrles). Les donnes humberside du package spatstat
donne la position des 62 cas de leucmie chez lenfant et de 141 rsidences den-
fants sains tirs au hasard dans le registre des naissances de la zone dtude
pour une priode xe (North-Humberside, G.B., 19741982). Ces donnes,
ralisation dun PPM deux marques (1 pour malade et 0 pour sain) ont t
tudies pour la premire fois par Cuzyk et Edwards [53] (cf. Diggle [62]).
Tester par la mthode de Monte Carlo que la fonction D(h) = K
1
(h) K
0
(h)
est nulle, cest--dire quen dehors dun facteur de densit spatiale de la po-
pulation des enfants, il ny a pas de risque spatial concernant la leucmie.
5.15. PVC pour un PP noyau doux (soft core).
Soit X un PP de densit
f
(x) = ()
n(x)
1i<jn
exp
_
|x
i
x
j
|
_
2/
sur S = [0, 1]
2
, o = (, )
t
avec > 0 et 0 < sont inconnues
et 0 < < 1 est connu, () tant la constante de normalisation. Analyser
linuence des paramtres et sur la loi de la conguration spatiale. crire
le modle sous forme exponentielle et calculer sa pseudo-vraisemblance.
5.16. MV pour le processus noyau dur.
Soit X le PP noyau dur sur [0, 1]
2
de densit
f
(x) = ()h(x)
n(x)
,
5.6 Modle hirarchique spatial et statistique baysienne 251
o h(x) =
1i<jn
1l|x
i
x
j
| , = (, )
t
, > 0, > 0 et () tant
la constante de normalisation. Montrer quon peut trouver une expression
explicite pour lEMV de mais que ce nest pas possible pour .
5.17. Analyse des jeu de donnes lansing et spruce.
Le jeu de donnes lansing du package spatstat donne la localisation spatiale
de trois types de chne : rouge, blanc et noir.
1. Estimer les caractristiques au second ordre K et J pour les trois locali-
sations.
2. Tester le caractre poissonnien des rpartitions par une mthode Monte
Carlo.
Le jeu de donnes spruce du package spatstat donne la localisation et
les diamtres des sapins dune fort saxonne. Nous examinerons seulement la
variable de localisation.
1. Estimer le modle de Strauss par la mthode du PMV en identiant pr-
liminairement le rayon dinteraction r.
2. Valider ce choix de modle en simulant 40 ralisations du modle estim
et en utilisant la fonction K.
3. Un modle avec un potentiel dordre deux modlis par une fonction en
escalier est-il prfrable ?
Les exercices qui suivent tudient le comportement asymptotique destima-
teur dans un cadre pas ncessairement spatial. Ils font appel aux proprits de
la mthode destimation par minimum de contraste prsente lAppendice C.
5.18. Convergence des MCO pour un modle de rgression.
On considre le modle de rgression :
y
i
= f(x
i
, ) +
i
, i = 1, . . . , n
rsidus (
i
) i.i.d. (0,
2
), o f est continue en (x, ), A = (x
i
) sont des
ralisations i.i.d. dune loi g sur R
k
support compact, et est un point
intrieur de , un compact de R
p
. Ecrire une condition assurant la convergence
de lestimateur des MCO. Peut-on aaiblir lhypothse sur A ?
5.19. PV C pour une loi gaussienne bivarie.
Soit Z = (X, Y ) une loi gaussienne bivarie centre, X et Y tant de variance
1 et de corrlation . On observe un n-chantillon Z(n) = (Z
1
, Z
2
, . . . , Z
n
)
de Z. Ecrire la PVC de Z(n). Montrer que lestimateur du maximum de PVC
de est convergent, asymptotiquement normal. Quelle est son ecacit en
comparaison de lestimateur du MV?
252 5 Statistique des modles spatiaux
5.20. Estimation dune chane de Markov inhomogne.
Soit Y = Y
i
, i N une chane de Markov espace dtats E ni, de transi-
tion P(Y
i+1
= z [ Y
i
= y) = p(y, z; , x
i
) o x
i
X est une variable exogne
observe, X tant un espace compact mesurable (X, A). On suppose que p est
continue, de classe (
2
en . Soit une mesure positive sur (X, A) telle que :
(C1)
yE
_
X
p(y, ; , x)(dx) est injective.
(C2) A A, liminf
n
(n
1
n
i=1
1(x
i
A)) (A).
1. Montrer que sous (C), lestimation du MV est convergente.
2. Etudier sa normalit et le test asymptotique du rapport de vraisemblance.
3. Exemple : X R, F est une fonction de rpartition de classe (
2
, f = F
t
>
0, E = 0, 1 et p(y, z; x, , ) = F(xy + y). Ecrire (C) ; dterminer la
loi asymptotique de lestimateur du MV. Tester = 0.
5.21. Estimation par pseudo-vraisemblance marginale.
X est un champ rel sur S = Z
d
, ergodique, exponentiellement mlangeant,
de loi dpendant dun paramtre , un compact de R
p
. Soit M un sous-
ensemble ni de S, M
i
= M + i pour i S, g : R
]M]
R continue,
D
n
= 1, 2, . . . , n
d
, et le contraste marginal :
U
n
() = d
1
n
iDn
g(X(A
i
, )).
1. Donner les conditions sur (X, g) assurant la convergence de lestimateur
du minimum de contraste.
2. Etudier la normalit asymptotique de cet estimateur.
3. Exemple : on considre Y une chane de Markov tats 1, +1 de
transition p = P(Y
i
,= Y
i1
[ Y
i1
). Y est bruite en chaque site de faon
i.i.d., la rponse bruite X
i
vriant : P(X
i
= Y
i
) = 1 = 1 P(X
i
,=
Y
i
). Peut-on identier = (p, ) partir de la loi du couple (X
0
, X
1
) ?
Estimer partir du contraste marginal des triplets (X
i
, X
i+1
, X
i+2
).
Tester lindpendance de la chane Y .
5.22. Estimation dune dynamique de champ de Markov par PVC.
Soit X = (X(t), t N), X(t) = (X
i
(t), i S) 0, 1
S
, une dynamique sur
S = 1, 2, . . . , n modlise par une chane de Markov homogne et ergodique.
La transition x y de cette dynamique est dnie par :
P(X(t + 1) = y [ X(t) = x) = p(x, y; ) = Z
1
(x, ) exp U(x, y, )
o
U(x, y; ) =
n
i=1
y
i
x
i
+(x
i1
+x
i+1
) +(y
i1
+y
i+1
).
5.6 Modle hirarchique spatial et statistique baysienne 253
1. Quelle dicult rencontre-t-on dans le calcul de la vraisemblance ?
2. Calculer les lois conditionnelles L(X
i
(t) [ x
i
(t), x(t 1)). En dduire la
PVC associe.
3. Etudier les proprits asymptotiques de lestimateur du maximum de PVC
(resp. de codage). Tester lindpendance temporelle ( = = 0). Tester
lindpendance spatiale ( = 0).
5.23. Consistance de lestimation par MV de la densit param-
trique dun PPP.
Soit X un PPP dintensit (, ) sur R
d
, un compact de R
p
, la vraie
valeur inconnue du paramtre tant intrieure . On suppose que X est
observ sur la fentre D
n
= [0, n]
d
de mesure d
n
.
1. Utilisant lidentit si X est un PPP() [160],
E
XS
h(, X) =
_
S
Eh(, X)()d,
en dduire que la log-vraisemblance l
n
() de X sous calcule sur D
n
vaut :
E[l
n
()l
n
()] =K
n
(, )=
_
Dn
__
(, )
(, )
1
_
log
(, )
(, )
_
(, )d.
2. On suppose que (, ) est uniformment borne en (, ). En dduire que
pour une constante M < , on a, uniformment en :
V ar
(l
n
()) Md
n
.
Notant U
n
() = l
n
()/d
n
, en dduire que :
liminf
n
[U
n
() U
n
()] K(, ) = liminf
n
K
n
(, ) en probabilit.
3. Donner une condition didentiabilit sur la reprsentation (, )
assurant que K(, ) ,= 0 si ,= . En dduire que lestimation du MV de
est consistante si n .
A
Simulation de variables alatoires
Nous prsentons ici quelques mthodes classiques de simulation dune v.a..
Pour une approche plus approfondie, le lecteur pourra consulter le livre de
Devroye [59].
Supposons que lon dispose dun gnrateur U de loi uniforme |([0, 1]) sur
[0, 1] et que, plac dans une boucle, ce gnrateur retourne des ralisations
(U
n
) i.i.d. |([0, 1]).
A.1 La mthode dinversion
Soit X une v.a.r. de fonction de rpartition F : R [0, 1] dnie, si x R,
par F(x) = P(X x) : F est croissante, cadlag (continue droite, limite
gauche), de limite 0 en , 1 en +. De plus, F est continue partout ds
que X admet une densit g ; dans ce cas, F(x) =
_
x
g(u)du.
Notons F
1
: [0, 1] R la pseudo-inverse de F dnie par :
F
1
(u) = inf x : F(x) u si u [0, 1].
La proprit suivante est la base de la mthode de simulation par in-
version : si U est uniforme sur [0, 1], alors X = F
1
(U) a pour fonction de
rpartition F. En eet :
P(X u) = P(F
1
(U) x) = P(U F(x)) = F(x). (A.1)
Chaque fois que F est explicite, (F
1
(U
n
), n 1) est une suite i.i.d. de v.a.
de loi X. Donnons quelques exemples dutilisation.
Simulation dune variable de Bernoulli de paramtre p
X 0, 1 est de loi p = P(X = 1) = 1P(X = 0). On tire alors une variable
U |([0, 1]) : si U < 1 p on retient X = 0 ; sinon on prend X = 1. La
procdure reste valable pour simuler toute loi valeurs binaires X a, b,
a ,= b.
256 A Simulation de variables alatoires
Simulation dune variable prenant un nombre ni de valeurs
Supposons que X prenne K valeurs a
1
, a
2
, . . . , a
K
avec les probabilits p
k
=
P(X = a
k
), k = 1, . . . , K,
K
1
p
k
= 1. On construit une partition de [0, 1[ en
K intervalles adjacents I
k
= [c
k1
, c
k
[, k = 1, . . . , K o c
0
= 0, c
k
=
k
1
p
i
pour k = 1, . . . , K et on tire U |([0, 1]) : si U I
k
, on retient X = a
k
.
Cette mthode ralise bien la simulation de X puisque
P(c
k1
U < c
k
) = p
k
= P(X = a
k
) pour k = 1, . . . , K. (A.2)
Variable prenant un nombre inni dnombrable de valeurs
Si X E prend un nombre inni dnombrable de valeurs, on commencera
par dterminer, pour un seuil > 0 petit (par exemple = 10
3
) un sous-
ensemble ni E
E concentrant 1 de la masse totale de X, c--d tel
que P(X E
) 1 . Puis on simulera X sur lensemble ni des modalits
E
EE
, EE
regroupant toutes les modalits en dehors de E
en
un unique tat.
Par exemple, pour simuler une loi de Poisson de paramtre , on commence
par dterminer la valeur n
0
telle que P(X > n
0
) < 10
3
, puis on simule X sur
0, 1, 2, . . . , n
0
plus de la faon dcrite ci-dessus, pour les probabilits :
P(X = n) = p
n
= e
n
n!
si 0 n n
0
et P(X plus) = 1
n0
0
p
n
.
Remarquons que l aussi, les modalits de X peuvent tre qualitatives.
Simulation dune loi exponentielle
Lidentit (A.1) permet de simuler une loi dont lespace dtat E T est
continu chaque fois que F
1
est explicite. Si X cxp() suit une loi expo-
nentielle de paramtre > 0, alors F(x) = 0 si x < 0 et F(x) = 1 e
x
si
x 0 et on en dduit que, pour tout u [0, 1],
F
1
(u) =
log(1 u)
.
U comme 1 U tant uniforme sur [0, 1] si U |([0, 1]), X = log(U)/
simule une loi exponentielle de paramtre . De mme,
X =
N
n=1
log U
n
ralise la simulation dune loi (, N) pour tout paramtre entier N 1. On
va voir plus loin comment simuler une telle loi si ce paramtre nest pas entier.
A.3 La mthode de rejet 257
A.2 Simulation dune chane de Markov nombre
ni dtat
Soit X = (X
0
, X
1
, X
2
, . . .) une chane de Markov homogne valeur dans
lespace dtat ni E = a
1
, a
2
, . . . , a
K
et de transition P = (p
ij
) [120; 103;
229] :
p
ij
= P(X
n+1
= j [ X
n
= i).
Avec la convention p
i,0
= 0, on dnit pour chaque i = 1, . . . , K la partition
de [0, 1[ en K intervalles adjacents I
i
(j) :
I
i
(j) = [c
j1
(i), c
j
(i)[, j = 1, . . . , K
o c
j
(i) =
j
l=0
p
i,l
.
Considrons alors lapplication : E [0, 1] E dnie, pour tout i =
1, . . . , K et u [0, 1] par :
(a
i
, u) = a
j
, si u I
i
(j).
Si U |([0, 1]), on a alors, pour tout i, j = 1, . . . , K :
P((a
i
, U) = a
j
) = P(U I
i
(j)) = p
ij
.
La suite x
0
, X
n+1
= (X
n
, U
n
), n 0 ralise la simulation dune chane de
Markov de transition P de condition initiale X
0
= x
0
. Si X
0
0
est simule
partir de (A.2), la suite (U
n
, n 0) permet de simuler la chane de Markov
de loi initiale
0
et de transition P.
A.3 La mthode de rejet
Cette mthode ralise la simulation dune v.a. X de densit f sur R
p
condi-
tion de connatre une loi de densit g sur R
p
, facile simuler et telle que, pour
tout x, f(x) cg(x) pour un c < . Considrons en eet Y une v.a. de den-
sit g et soit U |([0, 1]) indpendante de Y . Alors, la variable conditionnelle
suivante est de loi X :
(Y [ si c Ug(Y ) < f(Y )) X.
En eet, puisque c =
_
c g(y)dy
_
f(y)dy > 0 et que f(y) = 0 si g(y) = 0,
on a :
P(Y [x, x +dx] [ c Ug(Y ) < f(Y )) =
g(x)dxP(U <
f(x)
cg(x)
)
P(U <
f(Y )
cg(Y )
)
=
g(x)
f(x)
cg(x)
dx
_
f(y)
c g(y)
g(y)dy
= f(x)dx = P(X [x, x +dx]).
258 A Simulation de variables alatoires
Pour que la mthode soit utilisable, Y doit tre facile simuler et c ne doit
pas tre trop grand (rejet pas trop frquent) ; quand il est possible, le choix
optimal de c est c = sup
x
f(x)/g(x).
Exemple : simulation de lois Gamma et Beta
Une loi Gamma (, a), > 0, a > 0, a pour densit
f(x) =
a
(a)
e
x
x
a1
1(x > 0),
o (a) =
_
+
0
e
x
x
a1
dx.
Si Y (1, a), alors X = Y/ (, a) ; dautre part, la somme X + Z
de deux v.a. indpendantes de loi (, a) et (, b) suit une loi (, a +b). Il
sut donc de savoir simuler une loi (1, a) pour a ]0, 1] pour simuler toutes
les lois (, a
) pour > 0, a
> 0.
La simulation de Y , une v.a. de loi (1, a), a ]0, 1], sobtient par m-
thode de rejet : on remarque que pour la densit f(x) = (a)
1
e
x
x
a1
1
(x > 0) de Y ,
f
a +e
ae(a)
g ,
o g(x) = (a + e)
1
[e g
1
(x) + a g
2
(x)] avec g
1
(x) = a x
a1
1(0 < x < 1) et
g
2
(x) = e
x+1
1(1 < x < ). g
1
est une densit sur ]0, 1[, g
2
sur ]1, +[, lune
et lautre simulables par la mthode dinversion, et g est le mlange de ces
deux lois pour les poids (e/(a +e), a/(a +e)). Une premire loi uniforme per-
met de choisir si la ralisation de g est dans ]0, 1[ou dans ]1, +[, aprs quoi
on simule la variable retenue de densit g
i
par mthode dinversion, la simula-
tion de Y tant alors obtenue par la mthode de rejet : trois lois |([0, 1]) sont
donc utilise dans cette simulation. Dautres mthodes peuvent faire lcono-
mie dune variable uniforme, en particulier en simulant directement la loi de
densit g par la mthode dinversion.
Une loi Beta de paramtres a et b > 0, note (a, b), a pour densit
f(x) =
(a +b)
(a)(b)
x
a1
(1 x)
b1
1(0 < x < 1).
La simulation dune telle loi dcoulera de la simulation de lois au travers
de la proprit suivante : si X (, a) et Y (, b) sont indpendantes,
alors X/(X +Y ) (a, b).
A.4 Simulation dune loi gaussienne
Simulation dune gaussienne rduite ^(0, 1)
Les logiciels fournissent un gnrateur de la loi normale rduite. Celui-ci peut
sobtenir partir de deux lois U
1
et U
2
|([0, 1]) indpendantes de la faon
A.4 Simulation dune loi gaussienne 259
suivante (mthode de Box-Muller) : les deux variables X
1
et X
2
suivantes sont
normales rduites
X
1
=
_
2 log U
1
cos(2U
2
), X
2
=
_
2 log U
2
cos(2U
1
).
La simulation de Y ^(m,
2
) sobtiendra de faon ane, Y = m+X,
partir de celle dune normale rduite X. Les lois log-normale, du
2
, de
Student et de Fisher se simulent facilement partir du gnrateur gaussien
rduit.
Simulation dune loi gaussienne multivarie : Z ^
p
(, )
Si est de rang plein, et si p nest pas trop grand (p < 5, 000), on recherchera
une dcomposition (par exemple de Choleski) = A
t
A de : alors, si
X =
t
(X
1
, X
2
, . . . , X
p
) est un p-chantillon gaussien rduit, + AX ralise
la simulation de Z. Si r = rang() < p, on commence par rechercher le sous-
espace S, de dimension r, support de Z, puis, en se plaant dans une base
orthonorme de S, on simule le vecteur gaussien par la mthode prcdente.
B
Thormes limites pour un champ alatoire
B.1 Ergodicit et lois des grands nombres
Nous rappelons ici quelques rsultats dergodicit et de lois des grands
nombres (LGN) pour les processus spatiaux, une loi forte (LFGN) pour un
rsultat en convergence presque sr (p.s.) et faible pour une convergence
dans L
2
.
B.1.1 Ergodicit et thorme ergodique
Soit X = X
s
, s S un champ alatoire rel sur S = R
d
ou S = Z
d
.
Lergodicit est une proprit qui renforce la notion de stationnarit et qui
permet dobtenir la convergence p.s.dune moyenne empirique spatiale lorsque
le domaine dobservation tend vers linni. Si on se limite une convergence
dans L
2
, une ergodicit au second ordre sura. Lergodicit est importante
en statistique car elle permet dtablir la consistance p.s. destimateur ex-
plicit comme une moyenne spatiale. Cependant il nest pas indispensable de
disposer de cette proprit, trs forte, dergodicit pour tablir une telle consis-
tance ; des conditions de sous-ergodicit, voire des conditions L
2
, peuvent suf-
re (consistance de lestimation par PVC ou par codage, cf. Th. 5.4 et Th. 5.6 ;
consistance de lestimation par Minimum de Contraste, cf. Appendice C,
Th. C.1).
Notant = R
S
lespace des tats de X et c sa tribu borlienne, on dira
quun vnement A c est invariant par translation si pour tout i S,
i
(A) = A o
i
est la i-translation sur ainsi dnie : pour tout i S et
, (
i
())
j
=
ji
. Les vnements invariants forment une sous-tribu
1 c.
Un processus stationnaire X est caractris par le fait que sa loi P est inva-
riante par translation : pour tout vnement A = : X
s1
() B
1
, X
s2
()
B
2
, . . . , X
sn
() B
n
gnrateur de la tribu borlienne, on a :
i S : P(A) = P(
i
(A)).
262 B Thormes limites pour un champ alatoire
Lergodicit renforce cette proprit.
Dnition B.1. Le processus stationnaire X est ergodique si pour tout v-
nement invariant A 1, P(A) = 0 ou P(A) = 1.
Si X est ergodique, la tribu 1 des invariants est triviale. Linterprtation
heuristique est que si un vnement invariant A est de probabilit > 0, alors
il est de probabilit 1, lensemble des translats de A engendrant lespace de
toutes les trajectoires.
Lexemple de base dun processus ergodique est celui dune suite de va-
riables i.i.d.. Lergodicit peut tre vue comme une proprit jointe de sta-
tionnarit et dindpendance asymptotique.
Enonons alors le thorme ergodique. Si B(x, r) est la boule centre en x
de rayon r, on dnit le diamtre intrieur d(D) de D R
d
par :
d(D) = supr : B(x, r) D.
Thorme B.1. (Birkho [32] si d = 1 ; Tempelman [211] et Nguyen et
Zessin [164] si d 2)
Supposons que X soit un processus rel sur R
d
, stationnaire, de L
p
pour
un p 1 et que (D
n
) soit une suite croissante de convexes borns telle que
d(D
n
) . Alors :
1. X
n
= [D
n
[
1
_
Dn
X
u
du E(X
0
[ 1) dans L
p
et p.s. si S = R
d
.
2. Si de plus X est ergodique, X
n
E(X
0
) p.s..
Sur S = Z
d
, on a : X
n
= D
n
1
iDn
X
i
E(X
0
[ 1) dans L
p
et p.s. si
S = Z
d
, la limite p.s. tant E(X
0
) si X est ergodique.
B.1.2 Exemples de processus ergodiques
Donnons quelques exemples de processus ergodiques.
X = X
i
, i S est une suite de v.a. relles i.i.d. de L
1
sur un ensemble
dnombrable S.
Y = Y
i
= g(X
i
), i S o X est ergodique sur S et g : E
V
R, pour
V S ni, est une application mesurable.
X est un champ stationnaire fortement mlangeant [116; 67] :
lim
h
P(
h
(A) B) = P(A)P(B), A, B c.
X est un champ stationnaire m-dpendant : U S et V S distants dau
moins m, alors les variables X
u
, u U et X
v
, v V sont indpen-
dantes.
X est un champ gaussien stationnaire sur R
d
(Z
d
) dont la covariance C tend
vers 0 linni [3] :
lim
h
C(h) = 0.
B.1 Ergodicit et lois des grands nombres 263
X est un champ de Gibbs sur Z
d
potentiel invariant par translation et
satisfaisant la condition dunicit de Dobrushin [85].
N = N([0, 1[
d
+i), i Z
d
o N(A) est le nombre de points dans A dun
PP ergodique sur R
d
(par exemple un PPP homogne, un PP de Neyman-
Scott homogne ou un PP de Cox dintensit un champ ergodique [204].
Y est un sous-ensemble alatoire de R
d
: Y =
xiX
B(x
i
, r) o X est un
PPP homogne (un PP ergodique) sur R
d
; Y est un champ boolen sur
R
d
, Y
s
= 1 si s Y et 0 sinon [43].
Lergodicit des PP (et des ensembles alatoires ferms de R
d
qui incluent
les PP) est tudie dans [125; 204; 56] et [135] (cas des PPP). Heinrich [111]
et Guan et Sherman [95] utilisent ces proprits pour prouver la consistance
destimateurs paramtriques dun PP. Une faon dapprocher lergodicit dun
PP X est de lui associer le processus latticiel
X de ses ralisations sur la
partition R
d
=
iZ
d A
i
, o A
i
= [i, i +1[, 1 tant le vecteur de composantes
1 de R
d
, et de vrier lergodicit de
X.
B.1.3 Ergodicit et LGN faible dans L
2
Supposons que X soit un champ stationnaire au second ordre sur R
d
de co-
variance C. On dira que X est ergodique dans L
2
si pour toute suite (D
n
) de
convexes borns telle que d(D
n
) , alors
X
n
=
1
[D
n
[
_
Dn
X
u
du E(X
0
) dans L
2
.
Soit F la mesure spectrale de X. On a la loi faible des grans nombres suivante
[227, Ch. 3 ; 96, Ch. 3 ; 43]
Thorme B.2. On a les quivalences :
(i) X est ergodique dans L
2
.
(ii) F na pas datome en 0 : F(0) = 0.
(iii) [D
n
[
1
_
Dn
C(u)du 0.
En particulier, ces conditions sont satisfaites si lim
h
C(h) = 0 ou si
F est absolument continue.
Ces rsultats se transposent directement sur Z
d
: par exemple, si F est
absolument continue sur T
d
,
lim
n
X
n
= E(X
0
) dans L
2
.
Si de plus la densit spectrale f est borne et continue en 0, alors
lim
n
D
n
V ar(X
n
) = (2)
d
f(0),
la convergence de
D
n
X
n
tant gaussienne si X est gaussien.
264 B Thormes limites pour un champ alatoire
B.1.4 LFGN sous conditions L
2
On dispose aussi de LFGN sous des conditions L
2
. Un premier rsultat
(cf. [32], 3.4) concerne les suites de variables indpendantes mais non
(ncessairement) quidistribues (cf. lemme 5.1) : si X = X
i
, i N sont des
v.a.r. indpendantes, centres et dans L
2
, alors
n
i=1
X
i
0 p.s. ds que
i=1
V ar(X
i
) < .
Un autre rsultat concerne les estimateurs empiriques de la moyenne et
de la covariance C
X
(k) dun processus X stationnaire au second ordre sur Z
d
([96], 3.2) : si
hZ
d [C
X
(h)[ < , alors X
n
p.s. ; si de plus X est
stationnaire au 4
me
ordre, Y = Y
i
= (X
i
)(X
i+k
), i Z
d
vriant,
hZ
d [C
Y
(h)[ < , alors Y
n
C
X
(k) p.s. ; si X est gaussien, cette dernire
condition est satisfaite ds que X est densit spectrale de carr intgrable.
B.2 Coecient de mlange fort
Soit Z = Z
i
, i S un champ sur un rseau S muni dune mtrique d, A et B
deux parties de S, T(Z, H)) la tribu engendre par Z sur H, une partie de S.
Le coecient de mlange fort
Z
(E, F) de Z sur E, F, dni par Ibragimov
et Rozanov ([117] ; cf. aussi Doukhan [67]) est :
Z
(E, F) = sup[P(A B) P(A)P(B)[ : A T(Z, E), B T(Z, F).
Le champ est -mlangeant si
Z
(E, F) 0 ds que dist(E, F) .
On utilise galement les coecients paramtrs par les tailles k et l
N de E et de F ; pour n R :
k,l
(n) =
Z
k,l
(n) = sup
Z
(E, F) : E k, F l et dist(E, F) n.
Exemples de champ -mlangeant
1. Si Z est -mlangeant, toute fonctionnelle mesurable Z
W
= (f
i
(Z
Wi
))
qui dpend localement de Z est encore un champ -mlangeant : plus
prcisment, si pour tout i S, (W
i
) est une famille de parties t.q. i W
i
et le diamtre (W
i
) de W
i
est uniformment born par , alors Z
W
=
(f
i
(Z
Wi
)) est -mlangeant o
ZW
k,l
(n) =
Z
k,l
(n 2) ds que n > 2.
2. Champ R-dpendant : Z est un champ R-dpendant si, pour tout couple
(i, j) distance > R, Z
i
et Z
j
sont indpendants. Pour un champ
R-dpendant,
Z
(E, F) = 0 si d(E, F) R et, pour tout k, l,
Z
k,l
est
nulle si n 2R.
3. Champ gaussien : soit Z un champ gaussien stationnaire sur Z
d
de densit
spectrale f, f() a > 0 sur le tore T
d
. Notons D
K
(f) la distance entre f
et sa meilleure approximation par un polynme trigonomtrique de degr
(K 1).
B.2 Coecient de mlange fort 265
D
K
(f) = inf[f P[ : P() =
|t|<K
c
t
exp, t) o [t[ =
d
i=1
[t
i
[ .
On a alors ([117] pour d = 1 ; [96, 1.7], pour les champs) :
,
(k)
1
a
D
K
(f).
Si f est continue, ce coecient tend vers 0 si k , exponentiellement
vite si f est analytique (par exemple, si Z est un ARMA). Si Z admet
la reprsentation linaire Z
t
=
Z
d b
ts
t
pour un BB gaussien , on a,
plus prcisment :
,
(k)
2
a
|b|
|s|k/2
[sb
s
[.
On dispose aussi dvaluations du coecient de mlange pour des champs
linaires non gaussiens [67; 96].
4. Champ de Gibbs sous la condition dunicit de Dobrushin (Dobrushin [66] ;
Georgii [85] Guyon [96]).
La mesure dinuence de Dobrushin
a,b
() dun site a sur le site b, a,=b
dune spcication de Gibbs (
a,b
() si la spcication drive dun po-
tentiel ) est dnie par :
a,b
() = sup
1
2
|
b
( [ )
b
( [
)|
V T
,
o ||
V T
est la norme en variation totale, le sup tant pris sur les con-
gurations et
identiques partout sauf au site a. Si a = b, on pose
a,b
() = 0. On dit que le potentiel de Gibbs satisfait la condition de
Dobrushin si
(D) : () = sup
aS
bS
a,b
() < 1 (B.1)
(D) est une condition susante (mais non-ncessaire) assurant quil y a
au plus une mesure de Gibbs dans ((). Par exemple, pour le modle
dIsing sur Z
2
, isotropique et aux 4-ppv, de spcication en i,
i
(z
i
[ z
i
) =
exp z
i
v
i
exp v
i
+ exp v
i
, v
i
=
j:ij
1
=1
z
j
la condition exacte dunicit (Onsager [166] ; Georgii [85]) est <
c
=
1
2
log(1 +
2) 0.441 alors que la condition de Dobrushin, qui sexplicite
facilement dans ce cas, est <
1
4
log 2 0.275.
Si de plus lespace dtat du champ de Gibbs est polonais (par exemple
ni ou compact), muni dune mesure de rfrence positive et nie et
266 B Thormes limites pour un champ alatoire
si le potentiel est sommable, il y aura existence et unicit de la mesure
de Gibbs associe : (() = ; dans ce cas, si est born et
de porte borne, lunique mesure de Gibbs vrie une condition de
mlange uniforme exponentiel,
(A, B) C (A)
d(A,B)
,
o (A, B)=sup[(E [F )(E)[, ET(A), F T(B), (F) > 0 . est
galement fortement mlangeant puisquon a toujours 2() () [67].
Une dicult de la statistique asymptotique pour un champ de Gibbs
connu par sa spcication () est quon ne sait pas en gnral sil y a
unicit ou non de dans ((). On ne dispose donc pas en gnral de
proprit de faible dpendance. De mme, si le potentiel est invariant
par translation (S = Z
d
), on ne sait pas si est ergodique, voir si
est stationnaire : ainsi, les outils classiques de la statistique asymptotique
(ergodicit, faible dpendance, TCL) ne sont pas toujours utilisables.
5. Mlange pour un processus ponctuel spatial.
Un PP de Poisson X, homogne ou non, est -mlangeant puisque X
est indpendant. Cette proprit de mlange stend aux PP de Neyman-
Scott si les lois de descendance sont spatialement bornes par R : dans ce
cas, le PP est 2R-dpendant.
Dautres exemples de champs -mlangeant sont prsents dans
Doukhan [67].
B.3 TCL pour un champ mlangeant
Soit (D
n
) une suite strictement croissante de sous-ensembles nis de Z
d
, Z un
champ centr rel et de variance nie, S
n
=
Dn
Z
i
et
2
n
= V ar(S
n
). Notons
(
k,l
()) les coecients de mlange de Z. On a le rsultat suivant (Bolthausen
[30] ; Gyon [96], sans stationnarit) :
Proposition B.1. TCL pour un champ rel sur Z
d
Supposons vries les conditions suivantes :
(i)
m1
m
d1
k,l
(m) < si k +l 4 et
1,
(m) = o(m
d
).
(ii) Il existe > 0 t.q. : sup
iS
E[Z
i
[
2+
< et
m1
m
d1
1,1
(m)
/2+
< .
(iii) liminf
n
(D
n
)
1
2
n
> 0.
Alors,
1
n
S
n
loi
^(0, 1).
B.4 TCL pour une fonctionnelle dun champ de Markov 267
Commentaires
1. Les conditions sur le mlange sont satisfaites pour un champ gaussien
stationnaire de densit susamment rgulire ou pour un champ de Gibbs
sous la condition dunicit de Dobrushin (B.1).
2. Si on veut utiliser un seul coecient de mlange, on peut se limiter
2,
et la condition :
m1
m
d1
2,
(m) < .
3. Le rsultat du thorme reste inchang si S R
d
est un rseau inni
dnombrable localement ni :
0
> 0 t.q. pour tout i ,= j, deux sites de
S, |i j|
0
. En eet, dans ce cas et comme pour le rseau rgulier Z
d
,
la proprit cl est que pour tout i S, la boule centre en i de rayon m
vrie, uniformment en i et m : B(i, m) S = O(m
d
).
4. Comme pour tout TCL, la condition de positivit (iii) peut tre dlicate
obtenir.
5. Si Z R
k
est un champ multidimensionnel, si
n
= V ar(S
n
), et si (iii)
est remplace par
(iii)
: liminf
n
(D
n
)
1
n
I
0
> 0,
pour une matrice d.p. I
0
, alors :
1/2
S
n
loi
^
k
(0, I
k
).
6. Les conditions donnes par Bolthausen sur le mlange semblent minimales.
Signalons cependant le travail de Lahiri [137] qui tablit un TCL partir
des seuls coecients
k
(n)
k,k
(n), k < . Les conditions requises
sont du type de celles de Bolthausen mais sans lvaluation des coe-
cients
k,
(). Ce travail propose galement des TCL pour des choix de
sites dobservations alatoires avec la possibilit de densication des sites
dobservation (mixed increasing-domain inll asymptotics).
B.4 TCL pour une fonctionnelle dun champ de Markov
Supposons que Z soit un champ de Markov sur S = Z
d
, valeur dans E
et de spcication invariante par translation. Notons V
i
= Z
j
, j i
les m valeurs dont dpend la spcication locale,
i
( [ Z
{i}
)
i
( [ V
i
)
et considrons une fonctionnelle mesurable A : E
m+1
R telle que Y
i
=
A(Z
i
, V
i
) vrie, pour tout i, la condition de centrage conditionnel :
E(Y
i
[ Z
j
, j ,= i) = 0. (B.2)
Lexemple type o cette condition est vrie est le cas o Y est le gradient
(en ) de la pseudo-vraisemblance conditionnelle dun champ de Markov.
268 B Thormes limites pour un champ alatoire
Pour simplier, supposons que D
n
= [n, n]
d
soit la suite des domaines
dobservation de Z et notons S
n
=
Dn
Y
i
.
Nous prsentons deux TCL pour la fonctionnelle Y : le premier [99; 123]
utilise la proprit dergodicit du champ Z, proprit qui remplace celle de
mlange. Le deuxime (Comets et Janzura [47]), plus gnral, suppose uni-
quement linvariance par translation de la spcication conditionnelle de Z
et donne une version studentise du TCL sous une condition duniforme posi-
tivit de la variance de S
n
par observation. Le rsultat de Comets et Janzura
sapplique donc sans hypothse dergodicit ni de stationnarit du champ,
quil y ait ou non transition de phase pour la spcication .
Proposition B.2. [99; 123; 96]
Supposons que Z soit un champ de Markov sur Z
d
de spcication inva-
riante par translation, ergodique, la fonctionnelle a tant borne et vriant
la condition de centrage (B.2). Alors, si
2
=
j0
E(Y
0
Y
j
) > 0, on a :
(D
n
)
1/2
S
n
loi
^(0, 1).
Comme pour chaque TCL, la condition
2
> 0 peut tre dlicate tablir.
Cette condition est tablie dans [99] pour le modle dIsing isotropique et aux
4-ppv sur Z
d
.
Venons-en au rsultat de [47]. Dnissons A
n
=
iDn
ji
Y
i
Y
j
et
pour > 0, A
n
= maxA
n
, D
n
. Remarquons que A
n
estime sans biais
la variance de S
n
.
Proposition B.3. (Comets-Janzura [47])
Supposons que Z est un champ de Markov sur Z
d
de spcication inva-
riante par translation, que la fonctionnelle a vrie : sup
i
_
_
Y
4
i
_
_
< ainsi
que la condition de centrage (B.2). Dnissons la version studentise de S
n
:
n
= A
1/2
n
S
n
si A
n
> 0 et
n
= 0 sinon.
Alors, sous la condition :
> 0 tel que (D
n
)
1
E
A
n
A
n
0 (B.3)
n
loi
^(0, 1).
C
Estimation par minimum de contraste
Nous prsentons ici la mthode destimation dun modle paramtrique (ou
semi-paramtrique) par minimum de contraste (Dacunha-Castelle et Duo
[54]). Certains auteurs parlent encore destimation par pseudo-vraisemblan-
ce (Whittle [222] ; Besag [25]), ou par quasi-vraisemblance (McCullagh et
Nelder [155]), ou encore destimateurs dextremum (Amemiya [6] ; Gourie-
roux et Monfort [92]). Ces direntes terminologies recouvrent un mme
principe : la valeur estime du paramtre maximise une fonctionnelle de
pseudo-vraisemblance (PV). Cette fonctionnelle se substitue la vraisem-
blance quand celle-ci est indisponible, soit parce que le modle est semi-pa-
ramtrique et incompltement spci, soit parce que cette vraisemblance est
numriquement incalculable.
Sous de bonnes conditions sur la fonctionnelle de pseudo-vraisemblance
et sur le schma dobservations, lestimation par maximum de pseudo-vraisem-
blance (MPV) a de bonnes proprits statistiques : convergence, normalit et
test asymptotique pour le paramtre dintrt. Ces fonctionnelles, une fois
pnalise par la dimension du modle, permettent galement didentier un
modle.
Deux fonctionnelles de pseudo-vraisemblance jouent un rle central en sta-
tistique des processus spatiaux :
1. La pseudo-vraisemblance gaussienne pour un modle du second-ordre. Elle
sobtient en calculant la vraisemblance (ou une approximation de celle-
ci) en faisant lhypothse que le modle est gaussien. Ce contraste a t
introduit par Whittle [222] pour les sries temporelles et pour les champs
sur Z
2
(cf. 5.3.1).
2. La pseudo-vraisemblance conditionnelle (PVC) dun champ markovien sur
un rseau (cf. 5.4.2), produit des densits conditionnelles en chaque site
(Besag [25] ; Guyon [96]). Si ce produit est limit un sous-ensemble de
codage, on obtient la pseudo-vraisemblance par codage. La notion de PVC
existe aussi pour les processus ponctuels de Markov (cf. 5.5.5).
270 C Estimation par minimum de contraste
Lexemple standard de contraste est la fonctionnelle de moindres carrs
(estimation dune rgression spatiale (cf. 5.3.4), dun modle de variogramme
(cf. 5.1.3), dun processus ponctuel (cf. 5.5.4)). Des contrastes pour modles
spatio-temporels sont proposs dans [41; 98; 100].
Dune faon gnrale, une fonctionnelle de pseudo-vraisemblance devra
rpondre aux objectifs suivants :
1. Capter simplement les informations que lon privilgie sur le modle.
2. tre numriquement facile calculer.
3. Rendre identiable les paramtres du modle.
4. Permettre (si possible) un contrle statistique de lestimateur.
C.1 Dnitions et exemples
Considrons X = X
i
, i S un processus dni sur un ensemble ni ou
dnombrable de sites S. Que notre connaissance sur X soit partielle (modle
semi-paramtrique) ou totale (modle paramtrique), on notera R
p
le paramtre spciant linformation qui nous intresse.
Lobjectif est destimer partir dobservations X(n) = X
i
, i D
n
,
o D
n
est un sous-ensemble ni de sites. Ltude asymptotique est associe
une suite (D
n
) strictement croissante de domaines dobservation. Pour simpli-
er, on supposera que , la vraie valeur inconnue du paramtre, est un point
intrieur , un compact de R
p
; dnote un point courant de .
Une fonction de contraste pour est une fonction dterministe
K(, ) : R, K(, ) 0,
admettant un unique minimum en = . La valeur K(, ) sinterprte
comme une pseudo-distance entre le modle sous et celui sous .
Un processus de contraste associ la fonction de contraste K(, ) et aux
observations X(n) est une suite (U
n
(), n 1) de variables alatoires adapte
X(n), U
n
() = U
n
(, X(n)), dnie pour tout , et telle que :
: liminf
n
[U
n
() U
n
()] K(, ), en P
-probabilit. (C.1)
Cette condition sous-ergodique (C.1) traduit que la dirence U
n
() U
n
()
qui estime le contraste de sur sur la base de X(n) spare asymptotique-
ment les paramtres. La condition (C.1) peut tre renforce par la condition
ergodique,
lim
n
[U
n
() U
n
()] = K(, ), en P
-probabilit. (C.2)
Dnition C.1. Lestimateur du minimum de contraste U
n
est une valeur
n
de minimisant U
n
:
n
= argmin
U
n
().
Donnons quelques exemples.
C.1 Dnitions et exemples 271
Exemple C.1. Vraisemblance dun modle de Bernoulli
Supposons que les X
i
soient des v.a. de Bernoulli indpendantes de paramtres
p
i
= p(, Z
i
) = (1+expZ
i
)/(exp Z
i
), o Z
i
est une variable exogne relle,
R. Le contraste de la vraisemblance est loppos de la vraisemblance,
U
n
() =
n
1
log f
i
(X
i
, ). Si les exognes (Z
i
) et restent borns, la fonc-
tion de contraste
K(, ) = liminf
n
1
n
n
1
log
f
i
(X
i
, )
f
i
(X
i
, )
satisfait (C.1) ds que liminf
n
n
1
n
i=1
Z
2
i
> 0.
Exemple C.2. Contraste des moindres carrs dune rgression
Considrons un modle de rgression (linaire ou non),
X
i
= m(Z
i
, ) +
i
, i = 1, . . . , n
expliquant X
i
R partir de lexogne Z
i
, les rsidus (
i
) formant un BBf
de variance
2
< . Ce modle est semi-paramtrique car aucune hypothse
nest faite sur les lois des rsidus en dehors du fait que soit un BBf. Le
contraste des moindres carrs ordinaires (MCO) est dni par :
U
n
() = SCR
n
() =
n
i=1
(X
i
m(Z
i
, ))
2
.
Dnissons K(, ) = liminf
n
n
i=1
m(x
i
, )m(x
i
, )
2
/n. Si le dispositif
exprimental Z = Z
i
, i = 1, 2, . . . est tel que K(, ) > 0 pour ,= , alors
(U
n
) est un processus de contraste associ la fonction de contraste K(, ).
Cette condition est par exemple vrie si :
1. Les Z
i
sont i.i.d. de loi Z : Z est ergodique.
2. Z rend le modle m(, ) identiable, c--d :
Si ,=
, alors P
Z
z : m(z, ) ,= m(z,
> 0.
Si les rsidus sont gaussiens, U
n
() est, une constante multiplicative
prs, loppos de la log-vraisemblance.
Si les rsidus sont corrls de matrice de variance R
n
connue et inversible,
le contraste des moindres carrs gnraliss (MCG) est,
U
MCG
n
() = |X(n) m
n
()|
2
R
1
n
,
o m
n
() = m(Z
1
, ), . . .,m(Z
n
, ) et |u|
2
=
t
uu est la norme associe
la matrice d.p. . Le contraste des moindres carrs pondrs correspond
la norme associe la matrice de variance diagonale,
U
P
n
() =
n
i=1
(X
i
m(Z
i
, ))
2
V ar(
i
)
.
272 C Estimation par minimum de contraste
Exemple C.3. Mthode de moments, PV marginale
Supposons que X
1
, X
2
, . . . , X
n
soient des observations relles dune mme
loi
dpendant dun paramtre R
p
. Notons (
k
(), k = 1, . . . , r) les r
premiers moments de la loi commune, (
n,k
(), k = 1, . . . , r) les estimations
empiriques de ces moments. Si D est une distance sur R
p
, un contraste pour
lestimation de est
U
n
() = D((
k
), (
n,k
())).
Une condition ncessaire pour que ce contraste rende identiable est que
r p. Pour construire un contraste rendant le paramtre identiable, on peut
tre amen considrer, au-del de la loi marginale
de X
1
, des lois de
couples, voir de triplets .... La mthode stend au cas o X est valeur dans
un espace dtat E gnral.
De mme, des densits marginales peuvent tre utilises pour construire
des estimateurs de . Si, par exemple, les couples (X
i
, X
i+1
) sont de mme
loi, et si ce couple permet didentier , on pourra utiliser la PV marginale
des couples :
l
n
() =
n1
i=1
log f(x
i
, x
i+1
; ).
Exemple C.4. Contraste gaussien dun processus au second ordre
Supposons que X = (X
t
, t Z) soit une srie temporelle relle, centre,
stationnaire lordre 2, de densit spectrale f
. Le spectrogramme associ aux
observations X(n) = (X
1
, X
2
, . . . , X
n
) est lestimation de la densit spectrale
associe aux covariances empiriques r
n
(k) :
I
n
() =
1
2
n1
k=n+1
r
n
(k)e
ik
o r
n
(k) = r
n
(k) = n
1
n|k|
i=1
X
i
X
i+k
.
Le spectrogramme I
n
() est un mauvais estimateur de f(). Par contre,
le contraste de Whittle dni par la rgularisation suivante de I
n
:
U
n
() =
1
2
_
2
0
_
log f
() +
I
n
()
f
()
_
d
est une bonne fonctionnelle pour estimer . Sous hypothse gaussienne,
2U
n
() approxime la log-vraisemblance. Sans hypothse gaussienne, U
n
conduit encore une bonne estimation sous de bonnes conditions gnrales
(Dalhaus et Knsch [57] ; Guyon [96] ; cf. 5.3.1). La fonction de contraste
associe U
n
est :
K(, ) =
1
2
_
2
0
_
log
f
()
f
()
1 +
f
()
f
()
_
d, K(, ) > 0 si ,= .
C.1 Dnitions et exemples 273
La condition K(, ) ,= 0 si ,= est assure si la paramtrisation de f
en
est identiable.
Exemple C.5. Pseudo-vraisemblance conditionnelle (PVC) dun champ de
Markov
Si la vraisemblance dune chane de Markov se calcule bien par rcursivit,
ce nest plus le cas pour un champ de Markov spatial qui est fondamentalement
un modle non-causal. La raison tient en partie la complexit du calcul de
la constante de normalisation. La mme dicult se prsente pour un modle
de Gibbs gnral.
Cest la raison pour laquelle Besag a propos, dans le contexte dun champ
de Markov sur un rseau, dutiliser la pseudo-vraisemblance conditionnelle
(PVC), produit des densits conditionnelles en chaque i de D
n
,
l
PV
n
() =
Dn
i
(x
i
[ x
i
, ). (C.3)
Si on limite le produit un ensemble C de codage, on parlera de pseudo-
vraisemblance sur le codage C. Pour lune ou lautre de ces fonctionnelles,
on devra sassurer de la condition de sous-ergodicit (C.1). Si lergodicit du
champ est susante, elle nest pas ncessaire. Cette remarque est importante
car en gnral on ne sait pas si un champ de Gibbs est ergodique.
Exemple C.6. Estimation par moindres carrs dun modle de variogramme
Si des donnes gostatistiques sont modlises par un processus intrinsque
de variogramme (, ), une faon classique destimer est de minimiser le
contraste des moindres carrs,
U
MC
n
() =
k
i=1
(
n
(h
i
) (h
i
, ))
2
.
Dans cette expression,
n
(h
i
) sont des estimations empiriques du variogramme
en h
i
, ceci pour k vecteurs (h
i
) pralablement choisis (cf. 5.1.3). Cette m-
thode de moindres carrs est galement utilise pour lestimation de modles
paramtriques de processus ponctuels spatiaux (cf. 5.5.4).
Exemple C.7. Pseudo-transition marginale dune dynamique de systme de
particules
Considrons, titre dexemple, une dynamique de prsence/absence
X
i
(t) 0, 1, i Z
2
, t = 0, 1, . . . dune espce vgtale sur le rseau spatial
Z
2
. Durett et Levin [74] proposent dtudier un processus de contact temps
discret deux paramtres (, ) ainsi caractris (cf. Fig. C.1) : soient x et y
les congurations aux instants successifs t et (t + 1),
274 C Estimation par minimum de contraste
(a) (b)
1 2 2 1 3 2 1
1 2 3 1 3 2
1 2 3 3 1 1
1 2 1 1 2 1 2
4 1 4 1 1 3 1
2 1 2 1 1 3
2 3 2 2 1 4 3
1 2 3 1 1 1
(c) (d)
Fig. C.1. Un exemple dvolution de la dynamique t t + 1 dun processus de
contact sur un rseau rgulier : (a) conguration X(t) au temps t (les reprsentent
les plantes vivantes) ; (b) plantes () qui meurent avec probabilit = 0.3 ; (c)
nombre de semis dans une parcelle aprs dissmination dans chacune des 4 parcelles
voisines de faon i.i.d. avec probabilit = 0.25 ; (d) conguration X(t + 1) au
temps t + 1.
1. Une plante en un site i survit avec la probabilit (1 ).
2. Si une plante survit, elle essaime dans chacune des 4 parcelles voisines de
faon i.i.d. avec la probabilit .
3. y
i
= 1 si au moins une plante est prsente sur la parcelle i au temps (t+1).
On suppose de plus que tous les tirages dnissant cette dynamique sont
indpendants dans lespace et dans le temps.
Aprs les tapes 1. et 2., notons z
i
0, 1, 2, 3, 4, 5 le nombre de plantes
prsentes en i au temps (t + 1) ; par exemple z
i
= 5 si x
i
= 1 et survit et si
chaque plante en un site j voisin de i existe, survit et essaime en i. Le point
3. nous dit alors que y
i
= 1z
i
1 = 1. Si la simulation dune telle dyna-
mique est simple, le calcul de la transition P
S
(x, y) est impossible ds que S
est grand : en eet, dune part, il faut examiner chaque conguration parti-
culire x pour calculer la probabilit jointe de la ralisation z = z
i
, i S,
C.2 Proprits asymptotiques 275
problme qui est de complexit 2
(S)
; dautre part, on est en situation de
donnes imcompltes puisque seules les variables 1z
i
1 sont observes et
le calcul de la loi de lobservation au temps (t + 1) sen trouve complique.
Guyon et Pumo [101] proposent alors de remplacer cette transition par la
pseudo-transition marginale
M
S
(x, y) =
iI(x,S)
P
(X
i
(t + 1) = y
i
[ x), (C.4)
produit des transitions marginales sur I(x, S) = s S : x
s
+
js
x
j
1.
Les probabilits en jeu sont faciles calculer,
P
(X
i
(t + 1) = y
i
[ x) = P
(X
i
(t + 1) = y
i
[ x
{i}i
).
I(x, S) est lensemble des seuls sites o x apporte de linformation puisquen
eet, si x
s
+
ts
x
t
= 0 au temps t, alors X
t+1
(s) = 0.
La pseudo-vraisemblance marginale des observations temporelles x
S
(0),
x
S
(1), . . . , x
S
(T) est alors dnie par le produit,
M
S,T
() =
T1
t=0
M
S
(x(t), x(t + 1)).
Conditionnellement la survie du processus, Guyon et Pumo [101] tablissent
la consistance et la normalit asymptotique de lestimateur associ cette PV
marginale.
Exemple C.8. Autres exemples
Dans la dnition (C.3), log
i
(x
i
[ x
i
, ) peut tre remplace par dautres
fonctionnelles h
i
(x(V
i
); ) mieux adaptes et permettant didentier le mo-
dle. Si la dpendance conditionnelle
i
est non-borne et/ou non-explicite,
on peut la remplacer par une fonctionnelle ad hoc : par exemple si X
i
R et
si on sait calculer g
i
(x(W
i
), ) = E
(X
i
[ x(W
i
)), alors
h
i
(x(V
i
), ) = x
i
g
i
(x(W
i
), )
2
pour V
i
= i W
i
conduit une pseudo-vraisemblance de moindres carrs conditionnels (MCC).
Une pseudo-vraisemblance marginale pour laquelle h
i
(x(V
i
)), ) est la log-
densit marginale de X(V
i
) sous constitue un autre exemple de contraste.
C.2 Proprits asymptotiques
Les rsultats dans leur version ergodique sont dus Dacunha-Castelle et
Duo [54]. Dautres preuves sont donnes par Amemiya [6] et Gourieroux-
Montfort [92]. La version non-ergodique des proprits asymptotiques de les-
timation par minimum de contraste est expose dans ([96], Ch. 3).
276 C Estimation par minimum de contraste
C.2.1 Convergence de lestimateur
On a le rsultat de convergence suivant (Hardouin [108] ; Guyon [96]) :
Thorme C.1.
n
Pr
sous les conditions suivantes :
(C1) K(, ) est continue ainsi que, P
p.s., les contrastes U
n
().
(C2) (U
n
) vrie la condition de sous-ergodicit (C.1).
(C3) Si W
n
() est le module de continuit de U
n
(),
k
0 t.q. pour chaque
k :
lim
n
P
(W
n
(1/k)
k
) = 0. (C.5)
Corollaire C.1. Soit U
n
=
p
i=1
a
n,i
U
n,i
, a
n,i
0 un processus de contraste
tel que :
1. U
n,1
satisfait (C1-C2-C3).
2. Chaque U
n,i
satisfait (C3).
3. a = liminf
n
a
n,1
> 0.
Alors lestimateur du minimum de contraste U
n
est convergent.
Ce corollaire explique pourquoi les conditions assurant la convergence de
lestimation dun champ de Markov pour un codage C impliquent celle de
lestimateur par pseudo-vraisemblance conditionnelle U
n
(cf. 5.4.2). En eet,
dans ce cas, U
n
= U
n,C
+
l
U
n,C
l
pour une partition C, (C
l
) de S en sous-
ensembles de codage et les conditions du corrolaire sont bien satisfaites.
Pour les processus de contrastes convexes, on a le rsultat de convergence
p.s. suivant (Senoussi [196] ; Guyon [96]) :
Proposition C.1. Si est un ouvert convexe de R
p
, si les contrastes
U
n
() sont convexes et si (C.2) est vrie, alors
n
p.s.
.
Obtention dun estimateur ecace par algorithme Newton-Raphson
Considrons un estimateur
n
de R
p
solution dun systme de p quations :
F(x(n); ) = 0, R
p
(C.6)
o F valeur dans R
p
. Les estimateurs du minimum de contraste sont de ce
type pour F
n
() = U
(1)
n
(), le gradient de U
n
.
La recherche de la solution de (C.6) ntant pas toujours facile, il est utile
dutiliser lalgorithme de Newton-Raphson initialis avec un bon estimateur
n
facile obtenir, estimateur conduisant en un pas
n
donn par :
n
=
n
T
1
(
n
)F(
n
), (C.7)
o T() est la matrice p p dlments F
(1)
i,j
(), drive en
j
de la compo-
sante i de F, i, j = 1, . . . , p.
C.2 Proprits asymptotiques 277
Si F est assez rgulire et si
n
est consistant une vitesse susante, Dz-
haparidze [75] montre que
n
est asymptotiquement quivalent
n
. Prcisons
ce rsultat. Soit ((n)) une suite relle tendant vers linni : on dira quun
estimateur
n
de est (n)-consistant si,
(n)(
n
) = O
P
(1).
Deux estimateurs
n
et
n
sont asymptotiquement (n)-quivalents si,
lim
n
(n)(
n
n
) = o
P
(1).
Posons alors les conditions :
(DZ-1) Lquation (C.6) admet une solution
n
qui est (n)-consistante.
(DZ-2) F est de classe (
2
(1()), pour 1() un voisinage de et W() rgu-
lire non-stochastique t.q.,
lim
n
(T() W())
P
= 0.
(DZ-3) Les drives secondes vrient :
> 0, M < t.q. lim
n
P
sup
_
_
_F
(2)
()
_
_
_ , 1() < M 1 .
Proposition C.2. (Dzhaparidze [75]) Supposons satisfaites les conditions
(DZ). Alors, si
n
est un estimateur initial (n)-consistant de la vi-
tesse (n) = o(
_
(n)), lestimateur
n
donn par (C.7) est asymptotiquement
(n)-quivalent
n
:
lim
n
(n)(
n
) = o
P
(1).
C.2.2 Normalit asymptotique
Quelques notations
Si h est une fonction relle de classe (
2
au voisinage de , h
(1)
() dnote
le gradient de h (vecteur des drives premires en ), et h
(2)
() la matrice
hessienne des drives secondes en . Si A et B sont deux matrices p p
symtriques, on notera :
|A B| =
i,j
[A
ij
B
ij
[ .
A B (resp. A > B) si A B est s.d.p. (resp. d.p.).
Si A > 0 admet la dcomposition spectrale A = PD
t
P, o P est orthogo-
nale et D diagonale, on choisira R = PD
1
2
comme matrice racine carre
de A : R
t
R =
t
RR = A.
278 C Estimation par minimum de contraste
Hypothses (N) assurant la normalit asymptotique
(N1) Il existe un voisinage V de sur lequel U
n
est de classe (
2
et une variable
alatoire relle h, P
-intgrable, tels que :
V,
_
_
U
n,
2(, x)
_
_
h(x).
(N2) Les matrices J
n
= V ar(
a
n
U
(1)
n
()) existent et il existe une suite
(a
n
) telle que :
(N2-1) Il existe J d.p. telle que partir dun certain rang, J
n
J.
(N2-2)
a
n
J
1/2
n
U
(1)
n
()
loi
^
p
(0, I
p
).
(N3) Il existe une suite de matrices non-stochastiques (I
n
) telle que :
(N3-1) Il existe I d.p. et non-stochastique telle que, partir dun certain
rang, I
n
I.
(N3-2) (U
(2)
n
() I
n
)
Pr
0.
Thorme C.2. Normalit asymptotique de
n
[108; 96]
Si
n
est convergent et si les conditions (N) sont vries, alors :
a
n
J
1/2
n
I
n
(
n
)
loi
^
p
(0, I
p
).
Corollaire C.2. Si U
n
est le contraste de la vraisemblance, alors :
1. Sous les hypothses du thorme prcdent, on peut choisir pour I
n
= J
n
,
la matrice dinformation de Fisher :
a
n
I
1/2
n
(
n
)
loi
^
p
(0, I
p
).
2. Sous la condition dergodicit I
n
Pr
I() > 0,
a
n
(
n
)
loi
^
p
(0, I()
1
).
Commentaires
1. J
n
et I
n
sont des matrices de pseudo-information quil faudra minorer
positivement.
2. La convergence gaussienne (N2-2) rsultera dun TCL pour des variables
faiblement dpendantes ou pour un champ conditionnellement centr (cf.
Th. B.2).
C.2 Proprits asymptotiques 279
Exemple C.9. Contraste additif pour un champ latticiel mlangeant [108; 96]
Les conditions (A1A3) ci-dessous impliquent (N). Elles sont relatives
un champ faiblement dpendant dni sur un rseau S discret de R
d
, non-
ncessairement rgulier, et au contraste additif :
U
n
() =
1
d
n
sDn
g
s
(X(V (s)), ).
U
n
est la somme de fonctionnelles locales g
s
, s S, o V (s), s S est une
famille de voisinages borns de s S et d
n
est le cardinal de D
n
. Par exemple,
g
s
est (loppos) du log dune (pseudo) densit, marginale ou conditionnelle.
(A1) Sur le lattice S R
d
:
S est inni, localement ni : s S et r > 0, B(s, r) S = O(r
d
).
(A2) Sur le processus X : X est -mlangeant, de coecient de mlange
() =
,
() (Doukhan [67] ; Guyon [96], B.2) satisfaisant :
(A2-1) > 0 t.q.
i,jDn
(d(i, j))
2+
= O(d
n
).
(A2-2)
l0
l
d1
(l) < .
(A3) Sur les fonctionnelles (g
s
, s S).
(A3-1) (N1) est vrie uniformment sur V par les g
s
, s S.
(A3-2) s S, E
(g
(1)
s
()) = 0 et sup
sS,,k=1,2
_
_
_g
(k)
s
()
_
_
_
2+
< .
(A3-3) il existe deux matrices symtriques I et J d.p. telles que pour n
grand :
J
n
= V ar(
d
n
U
(1)
n
()) J > 0 et I
n
= E
(U
(2)
n
()) I > 0.
Test asymptotique du rapport de pseudo-vraisemblance
Soit (H
p
) lhypothse de base R
p
, de dimension p, et (H
q
), q < p,
une sous-hypothse dnie par la spcication fonctionnelle :
(H
q
) : = r(), un ouvert de R
q
, = r() (C.8)
o r : est de classe (
2
(W) sur W, un voisinage de , la vraie valeur
du paramtre sous (H
q
). On supposera que (H
q
) est de dimension q et que
R =
r
() est de rang q.
Il y a deux faons daborder le problme du test de la sous-hypothse
(H
q
) : lune construit un test de dirence de contraste ; lautre est le test de
Wald testant que = r() sexprime sous la forme contrainte C() = 0.
280 C Estimation par minimum de contraste
Statistique de dirence de contraste
Notons U
n
() = U
n
(r()) le contraste sous (H
q
),
n
lestimateur du minimum
de contraste associ,
n
= r(
n
). Le test de dirence de contraste utilise la
statistique :
n
= 2a
n
_
U
n
(
n
) U
n
(
n
)
_
.
Soient I
n
, J
n
, I et J les matrices dnies de faon analogue I
n
, J
n
, I et J
mais pour U
n
, et :
A
n
= J
1/2
n
(I
1
n
RI
n
1
t
R)J
1/2
n
.
A
n
est une matrice s.d.p. de rang (p q) dont on note
i,n
, i = 1, . . . , p q
les valeurs propres > 0. Notons (F
n
L
G
n
) pour deux suites de fonctions de
rpartition telles que, pour tout x R, lim
n
(F
n
(x) G
n
(x)) = 0.
Thorme C.3. Test asymptotique de dirence de contraste ([22; 96])
Supposons que
n
soit convergent, que (U
n
) (resp. (U
n
)) vrie les hypo-
thses (N) sous (H
p
) (resp. sous (H
q
)). Alors, pour n grand et pour des
2
1
indpendants :
sous (H
q
) :
n
= 2a
n
_
U
n
(
n
) U
n
(
n
)
_
L
pq
i=1
i,n
2
i,1
.
Commentaires
1. Si on peut choisir I
n
= J
n
, A
n
est idempotente de rang (pq) : on retrouve
alors, dans une situation non-ncessairement ergodique, le test du
2
pq
du rapport de vraisemblance. On a I
n
= J
n
pour les contrastes suivants :
(a) La vraisemblance dobservations indpendantes.
(b) La vraisemblance dune chane de Markov non-ncessairement homo-
gne.
(c) Le contraste de codage dun champ de Markov.
(d) Plus gnralement, un modle de variables conditionnellement in-
dpendantes, avec une condition de sous-ergodicit sur les variables
conditionnantes.
2. Si le modle est ergodique, notant I (resp. J, I) la limite de (I
n
) (resp.
(J
n
), (I
n
)), et
i
, i = 1, . . . , p q les valeurs propres > 0 de A =
J
1/2
(I
1
RI
1
t
R)J
1/2
, alors
n
L
pq
i=1
i
2
i,1
sous (H
q
).
Test de spcication sous contrainte
Supposons que (H
q
) scrive sous une forme contrainte :
(H
q
) : = C() = 0,
C.3 Identication dun modle par contraste pnalis 281
o C : R
p
R
pq
est une contrainte de classe (
2
au voisinage de de rang
(p q) en , rang(C
(1)
()) = p q. Une faon directe de tester (H
q
) est
dutiliser la statistique de Wald associe la contrainte : est estime par
n
= C(
n
) et le test de (H
q
) repose sur la statistique
n
=
t
1
n
n
2
pq
sous (H
q
)
o
n
= C
(1)
(
n
)
V ar(
n
)
t
C
(1)
(
n
) est la variance estime de
n
sous (H
p
).
C.3 Identication dun modle par contraste pnalis
Supposons que lespace des paramtres vrie R
M
o R
M
correspond un
modle majorant, M < . Un choix habituel pour une famille c de modles
envisageables est la famille de parties non-vides de M = 1, 2, . . . , M,
= = (
i
)
iM
t.q.
i
= 0 si i / ,
ou encore une suite croissante despaces . Dautres choix peuvent se rvler
utiles pour intgrer des hypothses disotropie dun champ.
Identier le modle, cest, au vu de la ralisation X(n), estimer par
n
le support c du modle. Si (a
n
) est la vitesse associe au contraste
(U
n
) (cf. (N2)), on utilise comme fonction de dcision le contraste (pseudo-
vraisemblance) pnalis la vitesse c(n) par la dimension [[ du modle :
W
n
() = U
n
() +
c(n)
a
n
[()[ .
Notons :
W
n
() = U
n
() +
c(n)
a
n
[[
avec U
n
() = argmin
U
n
().
Le choix rpondant au principe de parcimonie de Akaike [4] est :
n
= argmin
E
W
n
().
Ce choix ralise un compromis entre un bon ajustement (qui exige un mo-
dle assez grand, U
n
() tant dcroissante de ) et un modle simple et
interprtable (modle explicatif de petite taille).
On dira quun tel critre identie le vrai modle si
n
0
: par exemple,
une vraisemblance pnalise permet didentier un modle convexe dobserva-
tions i.i.d. [196]. De mme, sous de bonnes conditions, le contraste de Whittle
dune srie temporelle stationnaire identie le modle [199; 107; 34]. Lidenti-
cation est aussi possible sans hypothse dergodicit.
282 C Estimation par minimum de contraste
La preuve de ce type de rsultat didentiabilit repose dune part sur le
contrle des probabilits de mauvaise identication de modle, dautre part
sur une condition du type Loi du Logarithme Itr pour le gradient U
(1)
n
du
processus de contraste. Ces conditions et les rsultats sont prsents dans
un cadre gnral dans [96, 3.4]. De faon plus prcise, Guyon et Yao [102]
donnent pour une large classe de modles et de contrastes associs (rgres-
sion et moindres carrs, AR et contraste de Whittle, champ de Markov et
pseudo-vraisemblance conditionnelle, modle variance innie), une descrip-
tion des ensembles de sur- et de sous-paramtrisation de modle, lvaluation
de leurs probabilits, valuation dont dcoule les conditions assurant la consis-
tance du critre pour chaque type de modle. Pour lidentication dun modle
de champ de Markov par pseudo-vraisemblance conditionnelle pnalise, on
pourra aussi consulter [124] et [52].
C.4 Preuve de deux rsultats du chapitre 5
C.4.1 Variance de lestimateur du MV dune rgression gaussienne
Soit l la log-vraisemblance dune rgression gaussienne ( 5.3.4), l
(1)
=
(l
(1)
, l
(1)
); on vrie directement que l
(1)
=
t
Z
1
(ZX). Utilisant lidentit
/
i
log([[) = tr(
1
i
), on obtient :
(l
(1)
)
i
= 2
1
tr(
1
i
) +
t
(X Z)
i
(X Z).
Identions alors les 4 blocs de la matrice des drives secondes ainsi que leurs
esprances.
(i) l
(2)
2
=
t
Z
1
Z est constante, gale J
.
(ii) La i-ime colonne de l
(2)
(,)
valant
t
Z
i
(Z X), E(l
(2)
(,)
) = 0.
(iii) (l
(2)
2
)
ij
= 2
1
tr(
1
ij
+
i
j
)+
t
(X Z)
ij
(X Z) ; mais
E
t
(X Z)
ij
(X Z) =
kl
ij
(k, l)cov(X
k
, X
l
)
=
kl
ij
(k, l)(k, l) = tr(
ij
).
On en dduit que E(l
(2)
2
)
ij
= 2
1
tr(
1
ij
+
i
j
+
ij
). Drivant en
i
j
le produit
1
I, on obtient
ij
+
i
j
+
j
i
+
ij
= 0
et donc : E(l
(2)
2
)
ij
= 2
1
tr(
j
i
).
.
C.4 Preuve de deux rsultats du Chapitre 5 283
C.4.2 Consistance du MV pour un champ de Markov stationnaire
Nous donnons ici la preuve de la consistance du MV pour un champ de
Markov stationnaire sur Z
d
(cf. 5.4.1). La dmonstration consiste vrier
les conditions gnrales assurant la convergence dun estimateur du minimum
de contraste (cf. C.2). Pour cela, on utilise plusieurs proprits dun champ
de Gibbs. La premire dit que si = P
(
s
(
) est stationnaire, alors
sexprime comme une combinaison linaire convexe des lments extrmaux
de (
s
(
), lois qui sont ergodiques [85, 7.3 et 14.2]. Si on montre la
consistance pour chaque composante
, on en dduira la -consistance du
MV car les lments extrmaux sont trangers entre eux. Il sura donc de
dmontrer la consistance pour une telle loi
(qui est ergodique), c--d d-
montrer la consistance du MV si est stationnaire et ergodique. A cette n,
notant U
n
le contraste gal loppos de la log-vraisemblance de X sur D
n
,
U
n
(x; ) =
1
D
n
log Z
n
(x
Dn
; ) H
n
(x; ),
on prouvera la consistance du MV en :
1. Identiant la fonction de contraste : K(, ) = lim
n
U
n
().
2. Vriant sa continuit en et que = est son unique minimum.
3. Constatant que la condition sur le module de continuit de U
n
est satis-
faite.
An dtudier le comportement limite de U
n
, faisons la remarque prli-
minaire suivante : pour un potentiel gnral = (
A
, A S), dnissons
lnergie moyenne par site par,
i
=
A:iA
A
A
, i S.
On vrie que lnergie H
(x) =
A:A=
A
(x) de x sur vrie :
H
(x) =
i
(x) +
(x)
o
(x) =
A:A= et A
A
(x)
_
1
(A )
A
_
.
Pour la spcication (5.23) engendre par les
A
k
, k = 1, . . . , p, on a :
[
(x)[
A:A= et A
[
A
(x)[ p () sup
k
|
A
k
|
. (C.9)
En eet, les potentiels sont borns et A :
A
,= 0, A ,= et A
p . Dautre part, si est invariant par translation,
i
(x)
0
(
i
(x)).
On en dduit que :
284 C Estimation par minimum de contraste
U
n
(x; ) = p
n
(x; )
1
D
n
iDn
i
(x; ) +
1
D
n
Dn
(x; ), (C.10)
o p
n
(x; ) =
1
Dn
log Z
n
(x; ). Le premier terme de (C.10) tend vers la pres-
sion p() du potentiel
, indpendante de x (cf. [85], 15.3). Dautre part,
daprs la majoration (C.9), le troisime terme tend vers 0 uniformment en x
puisque D
n
/D
n
0. Quant au deuxime terme, il tend vers E
(
{0}
())
puisque est ergodique et que le potentiel est born. On obtient donc :
U
n
(x; ) U
n
(x, ) K(, ) = p() E
(
{0}
()) +h() 0
o h() est lentropie spcique de ([85], 15.4). La reprsentation
{0},
tant propre, ((
) ((
) = si ,= : le principe variationnel ([85],
15.4) dit alors que K(, ) > 0 si ,= .
Reste vrier la continuit de K(; ) et la condition sur le module
de continuit de U
n
. Contrlons dabord le terme p
n
. On a :
p
n
(x; ) p
n
(x; ) =
1
D
n
log
_
E
Dn
expH
n
(x; )
n
(dx
Dn
)
_
E
Dn
expH
n
(x; )
n
(dx
Dn
)
=
1
D
n
log
_
E
Dn
expH
n
(x; )H
n
(x; )
Dn
(dx
Dn
/x; )
1
D
n
E
Dn
(/x;)
H
n
(x; ) H
n
(x; ) (Jensen)
=
t
( )h
n
(x; ),
o h
n
(x; ) =
t
(h
k,n
(x; ), k = 1, . . . , p), h
k,n
(x; )=
1
Dn
E
Dn
(/x;)
h
k,n
(x).
On en dduit :
t
( )h
n
(x; ) p
n
(x; ) p
n
(x; )
t
( )h
n
(x; ).
Notant que si a u b, [u[ max[a[ , [b[ et que, pour tout (x; ),
h
k,n
(x; ) |
k
|
, on a :
[p
n
(x; ) p
n
(x; )[
p
k=1
[
k
k
[ |
k
|
. (C.11)
La mme majoration valant pour la limite p() p(), K(, ) est continue
en . Quant la condition sur le module de continuit de U
n
, elle rsulte de
la continuit uniforme en (, x) de U
n
, qui est elle-mme une consquence de
(C.11) et de lcriture de lnergie comme produit scalaire,
H
n
(x; ) H
n
(x; ) =
t
( )h
n
(x).
.
D
Logiciels
Nous avons utilis trois logiciels pour eectuer les calculs illustrant les
exemples dapplication : R, OpenBUGS et AntsInFields.
R est un systme danalyse statistique et graphique cr par Ihaka et
Gentleman [118]. Cest la fois un logiciel et un langage issu du logiciel S cr
par AT&T Bell Laboratories. Plus prcisment, R est un langage orient-objet
interprt.
R est distribu librement sous les termes de la GNU General Public Licence
(GPL) (voir www.r-project.org). Son dveloppement et sa distribution sont
assurs par le R Development Core Team. R est disponible sous plusieurs
formes : le code est crit principalement en C (et certaines programmes en
Fortran) surtout pour les machines Unix et Linux ou des excutables prcom-
pils pour Windows, Macintosh et Alpha Unix. Le code et les excutables sont
distribus partir du site internet cran.r-project.org du Comprehensive
R Archive Network (CRAN).
Plusieurs manuels sont distribus avec R dans les rpertoires du CRAN.
Pour se faire une ide rapide de R, nous conseillons de lire R pour les dbu-
tants dEmmanuel Paradis. Certaines fonctions pour lanalyse des donnes
sont contenues dans le package de base mais la majorit des mthodes statis-
tiques pour lanalyse de donnes spatiales par R sont distribues sous forme
de packages complmentaires.
Les packages constituent lun des points forts de R : ce sont des recueils de
fonctions dvelopps le plus souvent par des statisticiens qui ont propos la
mthodologie correspondante. Pour nos exemples de donnes spatiales, nous
avons utilis les packages suivants : geoR, RandomFields, spatstat, spdep.
Il existe dautres packages : pour en savoir plus, on pourra consulter la page :
http://cran.r-project.org/web/views/Spatial.html.
Donnons un court exemple de commandes an de se faire une ide de la
syntaxe de R. Considrons lexemple (5.16) tudiant la rpartition spatiale
de la tulipe aquatique. On suppose que les donnes sont enregistres dans
un chier nyssa.txt, les deux premires colonnes donnant les coordonnes
spatiales et la troisime le genre (mle ou femelle) de la tulipe. La lecture
des chiers de donnes structures en colonnes, en format ASCII standard ou
286 D Logiciels
CSV (texte dlimit, largeur xe, etc.) est ralise par la fonction read.table.
Ce qui se cre aprs lapplication de la fonction est un objet nyssa de type
tableau de donnes (data.frame). Cet objet est constitu dune liste :
nyssa <- read.table("nyssa.txt", header = TRUE)
Chaque composant de la liste est lquivalent dun vecteur et les dirents
lments de ces composants correspondent aux individus. Pour connatre les
noms de ces composantes, il sut dinvoquer la fonction names :
names(nyssa)
[1] "x" "y" "genre"
et pour une composante (par exemple la coordonne x), on crit nyssa$x.
Lutilisateur va agir sur un objet avec des oprateurs (arithmtiques, lo-
giques et de comparaison) et des fonctions (qui sont elles-mmes des objets) :
library(spatstat)
X <- ppp(nyssa$x, nyssa$y, marks = nyssa$genre,
window = owin(xrange = c(-1, 53),
yrange = c(0, 53)))
plot(X)
La premire ligne rend disponible le package spatstat. Le package
spatstat, ralis par Baddeley et Turner [15], contient les fonctions de
manipulation, reprsentation et certaines fonctions statistiques pour lana-
lyse de donnes ponctuelles. La deuxime ligne cre un objet X de la classe
ppp reprsentant une rpartition spatiale bidimensionnelle dans une fentre
[1, 53] [0, 53]. Enn, on applique cet objet la fonction plot qui donne
une reprsentation de la conguration (cf. Fig. D.1).
X
0 2 4 6 8 10 12
0
1
0
0
2
0
0
3
0
0
4
0
0
5
0
0
6
0
0
Kfun
r
K
(
r
)
iso
trans
border
theo
(a) (b)
Fig. D.1. (a) Rpartition spatiale de lespce Nyssa aquatica selon les caractres
mles () ou femelles ; (b) fonction thorique K pour un PPP homogne et
estimations pour direntes corrections de leet de bord.
D Logiciels 287
Pour calculer la fonction K de Ripley, on utilise la fonction Kest. La
souplesse de R est quune nouvelle application de la fonction plot un objet
dirent donne une reprsentation de la fonction K. La dernire ligne prcise
la lgende.
Kfun <- Kest(X)
plot(Kfun)
legend(2, 400, legend = c("iso", "trans", "border",
"theo"))
BUGS (Bayesian inference Using Gibbs Sampling) et sa version pour Win-
dows WinBUGS [146] est un logiciel dvelopp pour lanalyse statistique bay-
sienne en utilisant les mthodes de simulation MCMC, notamment lchan-
tillonneur de Gibbs. Nous avons utilis la version code ouvert OpenBUGS
[212] (disponible sur mathstat.helsinki.fi/openbugs). Il est commode de
spcier et destimer un modle hirarchique spatial avec BUGS en utilisant
le module GeoBUGS. A titre dexemple, tudions les spcications de modle
(5.52), (5.53) et (5.54) de lexemple 5.23 sur le cancer du poumon en Toscane.
model {
gamma[1:N] ~ car.normal(adj[], weights[], num[],
kappa)
for (i in 1 : N) {
alpha[i]~dnorm(0.0,tau)
O[i] ~ dpois(mu[i])
log(mu[i]) <- log(E[i]) + beta1 + gamma[i]+
alpha[i]
SMRhat[i] <- mu[i]/E[i]
}
beta1 ~ dnorm(0.0, 1.0E-5)
tau ~ dgamma(0.5, 0.0005)
kappa ~ dgamma(0.5, 0.0005)
}
Il existe aussi des packages de R, BRugs et R2WinBUGS qui fournissent des
interfaces entre R et BUGS.
AntsInFields est un logiciel dvelopp par Felix Friedrich pour la simula-
tion et lestimation des champs de Gibbs sur rseau ainsi que pour le traite-
ment dimage. Cest la fois un bon support didactique pour la simulation et
lestimation des champs de Gibbs et une aide la recherche. Orient-objet et
modulaire, il est disponible au site www.antsinfields.de sous les termes de
la GNU Less General Public Licence (LGPL). AntsInFields permet la simu-
lation par chantillonneur de Gibbs, par dynamique de Metropolis-Hastings,
la simulation exacte et loptimisation par recuit simul. Il ralise aussi les-
timation par PVC pour les modles dIsing, de Potts et les auto-modles de
Besag et est ouvert aux mthodes baysiennes en reconstruction dimage.
Littrature
[1] Aarts, E., Korst, J. : Simulated Annealing and Boltzman Machines :
Stochastic Approach to Combinatorial and Neural Computing. Wiley,
New York (1989)
[2] Abramowitz, M., Stegun, I.A. (eds.) : Handbook of Mathematical Func-
tions. Dover, New York (1970)
[3] Adler, R.J. : The Geometry of Random Fields. Wiley, New York (1981)
[4] Akaike, H. : Fitting autoregressive models for prediction. Annals of the
Institute of Statistical Mathematics 21, 243247 (1969)
[5] Alf, M., Postiglione, P. : Semiparametric modelling of spatial binary
observations. Statistical Modelling 2, 123137 (2002)
[6] Amemiya, T. : Advanced Econometric. Basil Blackwell, Oxford (1985)
[7] Anselin, L. : Spatial Econometrics : Methods and Models. Kluwer,
Dordrecht (1988)
[8] Arnold, B.C., Castillo, E., Sarabia, J.M. : Conditional Specication of
Statistical Models. Springer, New York (1999)
[9] Augustin, N.H., McNicol, J.W., Marriott, C.A. : Using the truncated
auto-poisson model for spatially correlated counts of vegetation. Journal
of Agricultural, Biological & Environmental Statistics 11, 123 (2006)
[10] Azencott, R. (ed.) : Simulated Annealing : Parallelization Techniques.
Wiley, New York (1992)
[11] Baddeley, A.J., Gregori, P., Mateu, J., Stoica, R., Stoyan, D. (eds.) :
Case Studies in Spatial Point Processes Modeling. Lecture Notes in
Statistics 185. Springer, New York (2006)
[12] Baddeley, A.J., Mller, J. : Nearest-neighbour Markov point processes
and random sets. International Statistical Review 57, 90121 (1989)
[13] Baddeley, A.J., Mller, J., Waagepetersen, R.P. : Non- and semi-
parametric estimation of interaction in inhomogeneous point patterns.
Statistica Neerlandica 54(329350) (2000)
[14] Baddeley, A.J., Turner, R. : Practical maximum pseudolikelihood for
spatial point patterns (with discussion). Australian and New Zealand
Journal of Statistics 42, 283322 (2000)
290 Littrature
[15] Baddeley, A.J., Turner, R. : Spatstat : an R package for analyzing spatial
point patterns. Journal of Statistical Software 12, 142 (2005)
[16] Baddeley, A.J., Turner, R., Mller, J., Hazelton, M. : Residual analy-
sis for spatial point processes (with discussion). Journal of the Royal
Statistical Society, Series B 67, 617666 (2005)
[17] Baddeley, A.J., van Lieshout, M.N.M. : Area-interaction point processes.
Annals of the Institute of Statistical Mathematics 46, 601619 (1995)
[18] Banerjee, S., Carlin, B.P., Gelfand, A.E. : Hierarchical Modeling and
Analysis for Spatial Data. Chapman & Hall/CRC, Boca Raton : FL
(2004)
[19] Barker, A.A. : Monte C arlo calculations of the radial distribution func-
tions for a proton-electron plasma. Australian Journal of Physics 18,
119133 (1965)
[20] Bartlett, M.S. : Physical nearest-neighbour models and non-linear time
series (I). Journal of Applied Probability 8, 222232 (1971)
[21] Bartlett, M.S. : Physical nearest-neighbour models and non-linear time
series (II). Journal of Applied Probability 9, 7686 (1972)
[22] Bayomog, S., Guyon, X., Hardouin, C., Yao, J. : Test de dirence de
contraste et somme pondre de Chi 2. Canadian Journal of Statistics
24, 115130 (1996)
[23] Benveniste, A., Mtivier, M., Priouret, P. : Adaptive Algorithms and
Stochastic Approximations. Springer, New York (1990)
[24] Besag, J. : On the correlation structure of some two dimensional statio-
nary processes. Biometrika 59, 4348 (1972)
[25] Besag, J. : Spatial interaction and the statistical analysis of lattice sys-
tems. Journal of the Royal Statistical Society, Series B 36, 192236
(1974)
[26] Besag, J. : Eciency of pseudo likelihood estimation for simple Gaussian
elds. Biometrika 64, 616618 (1977)
[27] Besag, J., Moran, P.A.P. : On the estimation and testing of spatial in-
teraction for Gaussian lattice processes. Biometrika 62, 555562 (1975)
[28] Besag, J., York, J., Molli, A. : Bayesian image restoration, with two ap-
plications in spatial statistics (with discussion). Annals of the Institute
of Statistical Mathematics 43, 159 (1991)
[29] Bochner, N. : Lectures on Fourier Integrals. Princeton University Press,
Princeton : NJ (1959)
[30] Bolthausen, E. : On the central limit theorem for stationary mixing
random elds. Annals of Probability 10, 10471050 (1982)
[31] Bouthemy, P., Hardouin, C., Piriou, G., Yao, J. : Mixed-state auto-
models and motion texture modeling. Journal of Mathematical Imaging
and Vision 25, 387402 (2006)
[32] Breiman, L. : Probability. SIAM Classics in Applied Mathematics 7,
Philadelphia : PA (1992)
Littrature 291
[33] Brillinger, D.R. : Estimation of the second-order intensities of a bivariate
stationary point process. Journal of the Royal Statistical Sociery, Series
B 38, 6066 (1976)
[34] Brockwell, P.J., Davis, R.A. : Time Series Analysis : Theory and Me-
thods. Springer, New York (1992)
[35] Brook, D. : On the distinction between the conditional probability and
joint probability approaches in the specication of nearest neighbour
systems. Biometrika 51, 481483 (1964)
[36] Brown, P.E., Kresen, K.F., Roberts, G.O., Tonellato, S. : Blur-
generated non-separable space-time models. Journal of the Royal
Statistical Society, Series B 62, 847860 (2000)
[37] Cairoli, R., Walsh, J.B. : Stochastic integral in the plane. Acta Mathe-
matica 134, 111183 (1975)
[38] Casson, E., Coles, S.G. : Spatial regression models for extremes. Extr-
emes 1, 449468 (1999)
[39] Catelan, D., Biggeri, A., Dreassi, E., Lagazio, C. : Space-cohort Bayesian
models in ecological studies. Statistical Modelling 6, 159173 (2006)
[40] Catoni, O. : Rough large deviation estimates for simulated annea-
ling : application to exponential schedules. Annals of Probability 20,
11091146 (1992)
[41] Chadoeuf, J., Nandris, D., Geiger, J., Nicole, M., Pierrat, J.C. : Mod-
lisation spatio-temporelle dune pidmie par un processus de Gibbs :
estimation et tests. Biometrics 48, 11651175 (1992)
[42] Chalmond, B. : Elments de modlisation pour lanalyse dimage.
Springer, Paris (2000)
[43] Chils, J.P., Delner, P. : Geostatistics. Wiley, New York (1999)
[44] Christensen, O.F., Roberts, G.O., Skld, M. : Robust Markov chain
Monte Carlo methods for spatial generalised linear mixed models. Jour-
nal of Computational and Graphical Statistics 15, 117 (2006)
[45] Cli, A.D., Ord, J.K. : Spatial Processes : Models and Applications.
Pion, London (1981)
[46] Comets, F. : On consistency of a class of estimators for exponential
families of Markov random elds on a lattice. Annals of Statistics 20,
455468 (1992)
[47] Comets, F., Janzura, M. : A central limit theorem for conditionally
centered random elds with an application to Markov elds. Journal of
Applied Probability 35, 608621 (1998)
[48] Cressie, N.A.C. : Statistics for Spatial Data, 2nd edn. Wiley, New York
(1993)
[49] Cressie, N.A.C., Hawkins, D.M. : Robust estimation of the variogram, I.
Journal of the International Association of Mathematical Geology 12,
115125 (1980)
[50] Cressie, N.A.C., Huang, H.C. : Classes of nonseparable, spatio-temporal
stationary covariance functions. Journal of the American Statistical
Association 94, 13301340 (1999)
292 Littrature
[51] Cross, G.R., Jain, A.K. : Markov eld texture models. IEEE Transac-
tions on Pattern Analysis and Machine Intelligence 5, 155169 (1983)
[52] Csiszar, I., Talata, Z. : Consistent estimation of the basic neighborhood
of Markov random elds. Annals of Statistics 34, 123145 (2006)
[53] Cuzick, J., Edwards, R. : Spatial clustering for inhomogeneous popu-
lations. Journal of the Royal Statistical Society, Series B 52, 73104
(1990)
[54] Dacunha-Castelle, D., Duo, M. : Probabilits et Statistiques, Tome 2 :
Problmes temps mobile. Masson, Paris (1993)
[55] Dacunha-Castelle, D., Duo, M. : Probabilits et Statistiques. Tome 1 :
Problmes temps xe. Masson, Paris (1994)
[56] Daley, D., Vere-Jones, D. : An Introduction to the Theory of Point
Processes, Vol. I, Elementary Theory and Methods, 2nd edn. Springer,
New York (2003)
[57] Dalhaus, R., Knsch, H.R. : Edge eect and ecient parameter estima-
tion for stationary random elds. Biometrika 74, 877882 (1987)
[58] De Iaco, S., Myers, D.E., Posa, T. : Nonseparable space-time covariance
models : some parametric families. Mathematical Geology 34, 2342
(2002)
[59] Devroye, L. : Non Uniform Random Variable Generation. Springer, New
York (1986)
[60] Diaconis, P., Freedman, D. : Iterated random gunctions. SIAM Review
41, 4576 (1999)
[61] Diaconis, P., Graham, R., Morrison, J. : Asymptotic analysis of a ran-
dom walk on an hypercube with many dimensions. Random Structure
Algorithms 1, 5172 (1990)
[62] Diggle, P.J. : Statistical Analysis of Spatial Point Patterns. Oxford
University Press, Oxford (2003)
[63] Diggle, P.J., Ribeiro, P.J. : Model-based Geostatistics. Springer, New
York (2007)
[64] Diggle, P.J., Tawn, J.A., Moyeed, R.A. : Model-based geostatistics (with
discussion). Applied Statistics 47, 299350 (1998)
[65] Dobrushin, R.L. : Central limit theorems for non stationary Markov
chains I, II. Theory of Probability and its Applications 1, 6580,
329383 (1956)
[66] Dobrushin, R.L. : The description of a random eld by means of condi-
tional probabilities and condition of its regularity. Theory of Probability
and its Applications 13, 197224 (1968)
[67] Doukhan, P. : Mixing : Properties and Examples. Lecture Notes in
Statistics 85. Springer, Berlin (1994)
[68] Droesbeke, J.J., Fine, J., Saporta, G. (eds.) : Mthodes baysiennes en
statistique. Technip, Paris (2002)
[69] Droesbeke, J.J., Lejeune, M., Saporta, G. (eds.) : Analyse statistique
des donnes spatiales. Technip, Paris (2006)
Littrature 293
[70] Dubois, G., Malczewski, J., De Cort, M. : Spatial interpolation compa-
rison 1997. Journal of Geographic Information and Decision Analysis 2
(1998)
[71] Duo, M. : Algorithmes stochastiques. Mathmatiques et applications.
Springer, Paris (1996)
[72] Duo, M. : Random Iterative Models. Springer, New York (1997)
[73] Durrett, R. : Ten lectures on particle systems. In : P. Bernard (ed.)
cole dt de St. Flour XXIII, Lecture Notes in Mathematics 1608,
pp. 97201. Springer, New York (1995)
[74] Durrett, R., Levin, S.A. : Stochastic spatial models : a users guide to
ecological applications. Philosophical Transactions of the Royal Society
of London, series B 343, 329350 (1994)
[75] Dzhaparidze, K.O. : On simplied estimators of unknown parameters
with good asymptotic properties. Theory of Probability and its Appli-
cations 19, 347358 (1974)
[76] Pfeifer, P.E., Deutsch, S.J. : Identication and interpretation of rst
order space-time arma models. Technometrics 22, 397408 (1980)
[77] Eriksson, M., Siska, P.P. : Understanding anisotropy computations. Ma-
thematical Geology 32, 683700 (2000)
[78] Ferrandiz, J., Lopez, A., Llopis, A., Morales, M., Tejerizo, M.L. : Spatial
interaction between neighbouring counties : cancer mortality data in
Valencia (Spain). Biometrics 51, 665678 (1995)
[79] Fuentes, M. : Approximate likelihood for large irregularly spaced spatial
data. Journal of the American Statistical Association 102, 321331
(2007)
[80] Gelman, A., Rubin, D.B. : Inference from iterative simulation using
multiple sequences. Statistical Science 7, 457511 (1992)
[81] Geman, D. : Random elds and inverse problem in imaging. In : P.L.
Hennequin (ed.) cole d Et de Probabilits de Saint-Flour XVIII,
Lecture Notes in Mathematics 1427, pp. 113193. Springer, New York
(1990)
[82] Geman, D., Geman, S. : Stochastic relaxation, Gibbs distributions and
the bayesian restoration of images. IEEE Transactions on Pattern Ana-
lysis and Machine Intelligence 6, 721741 (1984)
[83] Geman, S., Gragne, C. : Markov random elds models and their appli-
cations to computer vision. In : A.M. Gleason (ed.) Proceedings of the
International Congress of Mathematicians 1986, pp. 14961517. Ameri-
can Mathematical Society, Providence : RI (1987)
[84] Georgii, H.O. : Canonical and grand canonical Gibbs states for conti-
nuum systems. Communications of Mathematical Physics 48, 3151
(1976)
[85] Georgii, H.O. : Gibbs measure and phase transitions. De Gruyter, Berlin
(1988)
294 Littrature
[86] Geyer, C.J. : On the convergence of Monte Carlo maximum likelihood
calculations. Journal of the Royal Statistical Society, Series B 56,
261274 (1994)
[87] Geyer, C.J. (1999). Likelihood inference for spatial point processes. In
Stochastic geometry : likelihood and computation (eds O.E. Barndor-
Nielsen, W.S. Kendall & M.N.M. van Lieshout), 79140, Chapman &
Hall/CRC, Florida
[88] Geyer, C.J., Mller, J. : Simulation procedures and likelihood infe-
rence for spatial point processes. Scandinavian Journal of Statistics 21,
359373 (1994)
[89] Gilks, W.R., Richardson, S., Spiegelhalter, D.J. (eds.) : Markov Chain
Monte Carlo in Practice. Chapman & Hall, London (1996)
[90] Gneiting, T. : Nonseparable, stationary covariance functions for space-
time data. Journal of the American Statistical Association 97, 590600
(2002)
[91] Gneiting, T., Genton, M.G., Guttorp, P. : Geostatistical space-time mo-
dels, stationarity, separability and full symmetry. In : B. Finkenstadt,
L. Held, V. Isham (eds.) Statistical Methods for Spatio-Temporal Sys-
tems, pp. 151175. Chapman & Hall/CRC, Boca Raton : FL (2007)
[92] Gourieroux, C., Monfort, A. : Statistiques et modles conomtriques,
Tomes 1 et 2. Economica, Paris (1992)
[93] Green, P.J., Richardon, S. : Hidden Markov models and disease map-
ping. Journal of the American Statistical Association 97, 10551070
(2002)
[94] Greig, D.M., Porteous, B.T., Seheult, A.H. : Exact maximum a pos-
teriori estimation for binary images. Journal of the Royal Statistical
Society, Series B 51, 271279 (1989)
[95] Guan, Y., Sherman, M. : On least squares tting for stationary spatial
point processes. Journal of the Royal Statistical Society, Series B 69,
3149 (2007)
[96] Guyon, X. : Random Fields on a Network : Modeling, Statistics and
Applications. Springer, New York (1995)
[97] Guyon, X., Hardouin, C. : The Chi-2 dierence of coding test for testing
Markov random eld hypothesis. In : P. Barone, A. Frigessi, M. Piccioni
(eds.) Stochastic Models, Statistical Methods and Algorithms in Image
Analysis, Lecture Notes in Statistics 74, pp. 165176. Spinger, Berlin
(1992)
[98] Guyon, X., Hardouin, C. : Markov chain Markov eld dynamics : models
and statistics. Statistics 36, 339363 (2002)
[99] Guyon, X., Knsch, H.R. : Asymptotic comparison of estimator of the
Ising model. In : P. Barone, A. Frigessi, M. Piccioni (eds.) Stochastic
Models, Statistical Methods and Algorithms in Image Analysis, Lecture
Notes in Statistics 74, pp. 177198. Spinger, Berlin (1992)
Littrature 295
[100] Guyon, X., Pumo, B. : Estimation spatio-temporelle dun modle de
systme de particule. Comptes rendus de lAcadmie des sciences Paris
I-340, 619622 (2005)
[101] Guyon, X., Pumo, B. : Space-time estimation of a particle system model.
Statistics 41, 395407 (2007)
[102] Guyon, X., Yao, J.F. : On the undertting and overtting sets of models
chosen by order selection criteria. Journal of Multivariate Analysis 70,
221249 (1999)
[103] Hggstrm, O. : Finite Markov Chains and Algorithmic Applications.
Cambridge University Press, Cambridge (2002)
[104] Hggstrm, O., van Lieshout, M.N.M., Mller, J. : Characterisation re-
sults and Markov chain Monte Carlo algorithms including exact simu-
lation for some spatial point processes. Bernoulli 5, 641658 (1999)
[105] Haining, R. : Spatial Data Analysis in the Social and Environmental
Sciences. Cambridge University Press, Cambridge (1990)
[106] Hajek, B. : Cooling schedules for optimal annealing. Mathematics of
Operations Research 13, 311329 (1999)
[107] Hannan, E.J. : The estimation of the order of an ARMA process. Annals
of Statistics 8, 10711081 (1980)
[108] Hardouin, C. : Quelques rsultats nouveaux en statistique des proces-
sus : contraste fort, rgressions rlog-priodogramme. Ph.D. thesis,
Universit Paris VII, Paris (1992)
[109] Hardouin, C., Yao, J. : Multi-parameter auto-models and their applica-
tion. Biometrika (2008). Forthcoming
[110] Hastings, W. : Monte Carlo sampling methods using Markov chains and
their applications. Biometrika 57, 97109 (1970)
[111] Heinrich, L. : Minimum contrast estimates for parameters of spatial
ergodic point processes. In : Transactions of the 11th Prague Confe-
rence on Random Processes, Information Theory and Statistical Deci-
sion Functions, pp. 479492. Academic Publishing House, Prague (1992)
[112] Higdon, D. : Space and space-time modeling using process convolutions.
In : C. Anderson, V. Barnett, P.C. Chatwin, A. El-Shaarawi (eds.)
Quantitative Methods for Current Environmental Issues, pp. 3756.
Springer, London (2002)
[113] Higdon, D.M., Swall, J., Kern, J. : Non-stationary spatial modeling. In :
J.M. Bernado, J.O. Berger, A.P. Dawid, A.F.M. Smith (eds.) Bayesian
Statistics 6, pp. 761768. Oxford University Press, Oxford (1999)
[114] Hoeting, A., Davis, A., Merton, A., Thompson, S. : Model selection for
geostastistical models. Ecological Applications 16, 8798 (2006)
[115] Huang, F., Ogata, Y. : Improvements of the maximum pseudo-likelihood
estimators in various spatial statistical models. Journal of Computatio-
nal and Graphical Statistics 8, 510530 (1999)
[116] Ibragimov, I.A., Linnik, Y.V. : Independent and Stationary Sequences
of Random Variables. Wolters-Noordho, Groningen (1971)
296 Littrature
[117] Ibragimov, I.A., Rozanov, Y.A. : Processus alatoires gaussiens. MIR,
Moscou (1974)
[118] Ihaka, R., Gentleman, R. : R : a language for data analysis and graphics.
Journal of Computational and Graphical Statistics 5, 299314 (1996)
[119] Illig, A. : Une modlisation de donnes spatio-temporelles par AR spa-
tiaux. Journal de la socit francaise de statistique 147, 4764 (2006)
[120] Isaacson, D.L., Madsen, R.Q. : Markov Chains : Theory and Applica-
tion. Wiley, New York (1976)
[121] Jensen, J., Mller, J. : Pseudolikelihood for exponential family of spatial
point processes. Annals of Applied Probability 3, 445461 (1991)
[122] Jensen, J.L. : Asymptotic normality of estimates in spatial point pro-
cesses. Scandinavian Journal of Statistics 20, 97109 (1993)
[123] Jensen, J.L., Knsch, H.R. : On asymptotic normality of pseudo-
likelihood estimates for pairwise interaction processes. Annals of the
Institute of Statistical Mathematics 46, 475486 (1994)
[124] Ji, C., Seymour, L. : A consistent model selection procedure for Markov
random elds based on penalized pseudo-likelihood. Annals of Applied
Probability 6, 423443 (1996)
[125] Jolivet, E. : Central limit theorem and convergence of empirical pro-
cesses for stationary point processes. In : P. Bastfai, J. Tomko (eds.)
Point Processes and Queuing Problems, pp. 117161. North-Holland,
Amsterdam (1978)
[126] Jones, R., Zhang, Y. : Models for continuous stationary space-time pro-
cesses. In : T.G. Gregoire, D.R. Brillinger, P.J. Diggle, E. Russek-Cohen,
W.G. Warren, R.D. Wolnger (eds.) Modelling Longitudinal and Spa-
tially Correlated Data, Lecture Notes in Statistics 122, pp. 289298.
Springer, New York (1997)
[127] Kaiser, M.S., Cressie, N.A.C. : Modeling Poisson variables with posi-
tive spatial dependence. Statistics and Probability Letters 35, 423432
(1997)
[128] Keilson, J. : Markov Chain Models : Rarity and Exponentiality.
Springer, New York (1979)
[129] Kemeny, G., Snell, J.L. : Finite Markov Chains. Van Nostrand,
Princeton : NJ (1960)
[130] Kendall, W.S., Mller, J. : Perfect simulation using dominating pro-
cesses on ordered state spaces, with application to locally stable point
processes. Advances in Applied Probability 32, 844865 (2000)
[131] Klein, D. : Dobrushin uniqueness techniques and the decay of correlation
in continuum statistical mechanics. Communications in Mathematical
Physics 86, 227246 (1982)
[132] Koehler, J.B., Owen, A.B. : Computer experiments. In : S. Ghosh, C.R.
Rao (eds.) Handbook of Statistics,Vol 13, pp. 261308. North-Holland,
New York (1996)
[133] Kolovos, A., Christakos, G., Hristopulos, D.T., Serre, M.L. : Methods
for generating non-separable spatiotemporal covariance models with po-
Littrature 297
tential environmental applications. Advances in Water Resources 27,
815830 (2004)
[134] Krige, D. : A statistical approach to some basic mine valuation pro-
blems on the Witwatersrand. Journal of the Chemical, Metallurgical
and Mining Society of South Africa 52, 119139 (1951)
[135] Kutoyants, Y.A. : Statistical Inference for Spatial Poisson Processes.
Springer, New York (1998)
[136] Kyriakidis, P.C., Journel, A.G. : Geostatistical space-time models : a
review. Mathematical Geology 31, 651684 (1999)
[137] Lahiri, S.N. : CLT for weighted sums of a spatial process under a class
of stochastic and xed designs. Sankhya A 65, 356388 (2003)
[138] Lahiri, S.N., Lee, Y., Cressie, C.N.A. : On asymptotic distribution and
asymptotic eciency of least squares estimators of spatial variogram pa-
rameters. Journal Statistical Planning and Inference 103, 6585 (2002)
[139] Lantujoul, C. : Geostatistical Simulation. Springer, Berlin (2002)
[140] Laslett, M. : Kriging and splines : and empirical comparison of their
predictive performance in some applications. Journal of the Americal
Statistical Association 89, 391409 (1994)
[141] Lawson, A.B. : Statistical Methods in Spatial Epidemiology. Wiley, New
York (2001)
[142] Le, N.D., Zidek, J.V. : Statistical Analysis of Environmental Space-Time
Processes. Springer, New York (2006)
[143] Lee, H.K., Higdon, D.M., Calder, C.A., Holloman, C.H. : Ecient mo-
dels for correlated data via convolutions of intrinsic processes. Statistical
Modelling 5, 5374 (2005)
[144] Lee, Y.D., Lahiri, S.N. : Least square variogram tting by spatial sub-
sampling. Journal of the Royal Statistical Society, Series B 64, 837854
(2002)
[145] Love, M. : Probability Theory II. Springer, New York (1978)
[146] Lunn, D.J., Thomas, A., Best, N., Spiegelhalter, D.J. : WinBUGS - a
Bayesian modelling framework : concepts, structure, and extensibility.
Statistics and Computing 10, 325337 (2000)
[147] Ma, C. : Families of spatio-temporal stationary covariance models. Jour-
nal of Statistical Planning and Inference 116, 489501 (2003)
[148] Mardia, K.V., Goodall, C., Redfern, E.J., Alonso, F.J. : The Kriged
Kalman lter (with discussion). Test 7, 217252 (1998)
[149] Mardia, K.V., Marshall, J. : Maximum likelihood estimation of models
for residual covariance in spatial regression. Biometrika 71, 289295
(1984)
[150] Marroquin, J., Mitter, S., Poggio, T. : Probabilistic solution of ill posed
problem in computational vision. Journal of the American Statistical
Association 82, 7689 (1987)
[151] Mase, S. : Marked Gibbs processes and asymptotic normality of maxi-
mum pseudo-likelihood estimators. Mathematische Nachrichten 209,
151169 (1999)
298 Littrature
[152] Matheron, G. : Trait de gostatistique applique, Tome 1. Mmoires
du BRGM, n. 14. Technip, Paris (1962)
[153] Matheron, G. : The intrinsic random function and their applications.
Advances in Applied Probability 5, 439468 (1973)
[154] Matrn, B. : Spatial Variation : Stochastic Models and their Applica-
tions to Some Problems in Forest Surveys and Other Sampling Investi-
gations, 2nd edn. Springer, Heidelberg (1986)
[155] McCullagh, P., Nelder, J.A. : Generalized Linear Models. Chapman &
Hall, London (1989)
[156] Mercer, W.B., Hall, A.D. : The experimental error of eld trials. The
experimental error of eld trials 4, 107132 (1973)
[157] Meyn, S.P., Tweedie, R.L. : Markov Chains and Stochastic Stability.
Springer, New York (1993)
[158] Mitchell, T., Morris, M., Ylvisaker, D. : Existence of smoothed process
on an interval. Stochastic Processes and their Applications 35, 109119
(1990)
[159] Mller, J., Syversveen, A.R., Waagepetersen, R.P. : Log-gaussian Cox
processes. Scandinavian Journal of Statistics 25, 45182 (1998)
[160] Mller, J., Waagepetersen, R.P. : Statistical Inference and Simulation
for Spatial Point Processes. Chapman & Hall/CRC, Boca Raton : FL
(2004)
[161] Mller, J., Waagepetersen, R.P. : Modern statistics for spatial point
processes. Scandinavian Journal of Statistics 34, 643684 (2007)
[162] Moyeed, R.A., Baddeley, A.J. : Stochastic approximation of the MLE
for a spatial point pattern. Scandinavian Journal of Statistics 18, 3950
(1991)
[163] Neyman, J., Scott, E.L. : Statistical approach to problems of cosmology.
Journal of the Royal Statistical Society, Series B 20, 143 (1958)
[164] Nguyen, X.X., Zessin, H. : Ergodic theorems for spatial processes. Pro-
bability Theory and Related Fields 48, 133158 (1979)
[165] Nguyen, X.X., Zessin, H. : Integral and dierential characterization of
the Gibbs process. Mathematische Nachrichten 88, 105115 (1979)
[166] Onsager, L. : Crystal statistics I : A two dimensional model with order-
disorder transition. Physical Review 65, 117149 (1944)
[167] Ord, J.K. : Estimation methods for models of spatial interaction. Jour-
nal of the American Statistical Association 70, 120126 (1975)
[168] Papangelou, F. : The conditional intensity of general point processes and
application to line processes. Zeitschrift fr Wahscheinlichkeitstheorie
und verwandte Gebiete 28, 207227 (1974)
[169] Penttinen, A. : Modelling interaction in spatial point patterns : parame-
ter estimation by the maximum likelihood method. Jyvskyl Studies
in Computer Science, Economics and Statistics 7 (1984)
[170] Perrin, O., Meiring, W. : Identiability for non-stationary spatial struc-
ture. Journal of Applied Probability 36, 12441250 (1999)
Littrature 299
[171] Perrin, O., Senoussi, R. : Reducing non-stationary random elds to sta-
tionary and isotropy using space deformation. Statistics and Probability
Letters 48, 2332 (2000)
[172] Peskun, P. : Optimum Monte Carlo sampling using Markov chains. Bio-
metrika 60, 607612 (1973)
[173] Peyrard, N., Calonnec, A., Bonnot, F., Chadoeuf, J. : Explorer un jeu
de donnes sur grille par test de permutation. Revue de Statistique
Applique LIII, 5978 (2005)
[174] Pfeifer, P.E., Deutsch, S.J. : A three-stage iterative procedure for space-
time modeling. Technometrics 22, 93117 (1980)
[175] Ploner, A. : The use of the variogram cloud in geostatistical modelling.
Environmentrics 10, 413437 (1999)
[176] Preston, C. : Random Fields. Lecture Notes in Mathematics 534.
Springer, Berlin (1976)
[177] Propp, J.G., Wilson, D.B. : Exact sampling with coupled Markov chains
and applications to statistical mechanics. Random Structures and
Algorithms 9, 223252 (1996)
[178] R Development Core Team : R : A Language and Environment for
Statistical Computing. R Foundation for Statistical Computing, Vienna,
Austria (2007). URL http ://www.R-project.org
[179] Rathbun, S.L., Cressie, N.A.C. : Asymptotic properties of estimators
for the parameters of spatial inohomogeneous Poisson point processes.
Advances in Applied Probability 26, 122154 (1994)
[180] Revuz, D. : Probabilits. Herman, Paris (1997)
[181] Ribeiro, P., Diggle, P.J. : geoR : a package for geostatistical analysis.
R-NEWS 1, 1418 (2001)
[182] Richarson, S., Guihenneuc, C., Lasserre, V. : Spatial linear models with
autocorrelated error structure. The Statistician 41, 539557 (1992)
[183] Ripley, B.D. : The second-order analysis of stationary point processes.
Journal of Applied Probability 13, 255266 (1976)
[184] Ripley, B.D. : Statistical Inference for Spatial Processes. Cambridge
University Press, Cambridge (1988)
[185] Ripley, B.D. : Spatial Statistics. Wiley, New York (1991)
[186] Ripley, B.D., Kelly, F.P. : Markov point processes. Journal of the London
Mathematical Society 15, 188192 (1977)
[187] Robert, C.P. : Lanalyse statistique baysienne. Economica, Paris (1992)
[188] Robert, C.P., Casella, G. : Monte-Carlo Statistical Methods. Springer,
New York (1999)
[189] Rue, H., Held, L. : Gaussian Markov Random Fields : Theory and Ap-
plications. Chapman & Hall/CRC, Boca Raton : FL (2005)
[190] Ruelle, D. : Statistical Mechanics. Benjamin, New York (1969)
[191] Salo-Coste, L. : Lectures on nite Markov chains. In : P. Bernard (ed.)
Lectures on Probability Theory and Statistics. Ecole dt de Probabilit
de St. Flour XXVI, Lecture Notes in Mathematics 1665, pp. 301408.
Springer (1997)
300 Littrature
[192] Sampson, P., Guttorp, P. : Nonparametric estimation of nonstationary
spatial covariance structure. Journal of the American Statistical Asso-
ciation 87, 108119 (1992)
[193] Santer, T.J., Williams, B.J., Notz, W.I. : The Design and Analysis of
Computers Experiments. Springer, New York (2003)
[194] Schabenberger, O., Gotway, C.A. : Statistical Methods for Spatial Data
Analysis. Chapman & Hall/CRC, Boca Raton : FL (2004)
[195] Schlather, M. : Introduction to positive denite functions and to uncon-
ditional simulation of random elds. Tech. Rep. ST 99-10, Lancaster
University, Lancaster (1999)
[196] Senoussi, R. : Statistique asymptotique presque sre des modles statis-
tiques convexes. Annales de lInstitut Henri Poincar 26, 1944 (1990)
[197] Serra, J. : Image Analysis and Mathematical Morphology. Academic
Press, New York (1982)
[198] Shea, M.M., Dixon, P.M., Sharitz, R.R. : Size dierences, sex ratio, and
spatial distribution of male and female water tupelo, nyssa aquatica
(nyssaceae). American Journal of Botany 80, 2630 (1993)
[199] Shibata, R. : Selection of the order of an autoregessive model by Akaikes
information criterion. Biometrika 63, 117126 (1976)
[200] Stein, M.L. : Interpolation of Spatial Data : Some Theory for Kriging.
Springer, New York (1999)
[201] Stein, M.L. : Statistical methods for regular monitoring data. Journal
of the Royal Statistical Society, Series B 67, 667687 (2005)
[202] Storvik, G., Frigessi, A., Hirst, D. : Stationary space-time gaussian elds
and their time autoregressive representation. Stochastic Modelling 2,
139161 (2002)
[203] Stoyan, D., Grabarnik, P. : Second-order characteristics for stochas-
tic structures connected with Gibbs point processes. Mathematische
Nachrichten 151, 95100 (1991)
[204] Stoyan, D., Kendall, W.S., Mecke, J. (eds.) : Stochastic Geometry and
its Applications, 2nd edn. Wiley, New York (1995)
[205] Strathford, J.A., Robinson, W.D. : Distribution of neotropical migratory
bird species across an urbanizing landscape. Urban Ecosystems 8, 5977
(2005)
[206] Strauss, D.J. : A model for clustering. Biometrika 62, 467475 (1975)
[207] Strauss, D.J. : Clustering on colored lattice. Journal of Applied Proba-
bility 14, 135143 (1977)
[208] Stroud, J.R., Mller, P., Sans, B. : Dynamic models for spatio-temporal
data. Journal of the Royal Statistical Society, Series B 63, 673689
(2001)
[209] Sturtz, S., Ligges, U., Gelman, A. : R2WinBUGS : a package for running
WinBUGS from R. Journal of Statistical Software 2, 116 (2005)
[210] Sweeting, T.J. : Uniform asymptotic normality of the maximum likeli-
hood estimator. Annals of Statistics 8, 13751381 (1980)
Littrature 301
[211] Tempelman, A.A. : Ergodic theorems for general dynamical systems.
Transactions of the Moscow Mathematical Society 26, 94132 (1972)
[212] Thomas, A., O Hara, B., Ligges, U., Sturtz, S. : Making BUGS open.
R News 6, 1217 (2006)
[213] Thomas, M. : A generalisation of Poissons binomial limit for use in
ecology. Biometrika 36, 1825 (1949)
[214] Tierney, L. : Markov chains for exploring posterior distributions (with
discussion). Annals of Statistics 22, 17011762 (1994)
[215] Tierney, L. : A note on Metropolis-Hastings kernels for general state
space. Annals of Applied Probability 3, 19 (1998)
[216] Tukey, J.W. : Spectral Analysis Time Series. Wiley, New York (1967)
[217] Van Lieshout, M.N.M. : Markov Point Processes and their Applications.
Imperial College Press, London (2000)
[218] Van Lieshout, M.N.M., Baddeley, A.J. : Indices of dependence between
types in multivariate point patterns. Scandinavian Journal of Statistics
26, 511532 (1999)
[219] Ver Hoef, J., Barry, R.P. : Constructing and tting models for cokriging
and multivariable spatial prediction. Journal of Statistical Planning and
Inference 69, 275294 (1998)
[220] Waagepetersen, R.P. : An estimating function approach to inference for
inhomogeneous Neyman-Scott processes. Biometrics 63, 252258 (2007)
[221] Wackernagel, H. : Multivariate Geostatistics : An Introduction with Ap-
plications, 3rd edn. Springer, New York (2003)
[222] Whittle, P. : On stationary processes in the plane. Biometrika 41,
434449 (1954)
[223] Wikle, C.K., Cressie, N.A.C. : A dimension-reduced approach to space-
time Kalman ltering. Biometrika 86, 815829 (1999)
[224] Winkler, G. : Image Analysis, Random Fields and Markov Chain Monte
Carlo Methods, 2nd edn. Springer, Berlin (2003)
[225] Wolpert, R.L., Icktadt, K. : Poisson/Gamma random elds models for
spatial statistics. Biometrika 85, 251267 (1998)
[226] Wu, H., Huer, F.W. : Modelling the distribution of plant species using
the autologistic regression model. Environmental and Ecological Statis-
tics 4, 4964 (1997)
[227] Yaglom, A.M. : Correlation Theory of Stationary and Related Random
Functions. Volume I : Basic Results. Springer, New York (1987)
[228] Yao, J.F. : On constrained simulation and optimisation by Metropolis
chains. Statistics and Probability Letters 46, 187193 (2000)
[229] Ycart, B. : Modles et algorithmes markoviens. Mathmatiques et Ap-
plications. Springer, Paris (2002)
[230] Younes, L. : Estimation and annealing for Gibbsian elds. Annales de
lInstitut Henri Poincar (B). Probabilits et Statistiques 2, 269294
(1988)
302 Littrature
[231] Zhang, H., Zimmerman, D.L. : Towards reconciling two asymptotic fra-
meworks in spatial statistics. Biometrika 92, 921936 (2005)
[232] Zimmerman, D., Zimmerman, M. : A comparison of spatial semivario-
gram estimators and corresponding ordinary kriging predictors. Tech-
nometric 33, 7791 (1991)
Index
abrviations, liste de, XV
Admissible
densit, 94, 100
potentiel, nergie, 58, 76, 96
Algorithme
de Metropolis, 123, 239
de Metropolis inhomogne, 130
de Monte Carlo monotone, 141
de Propp et Wilson, 138
de recuit simul, 125, 130
markovien, 120
AMM, 69, 70, 128
AMMX : AMM avec covariables, 73
Analyse de la variance, 39, 59, 184
Analyse variographique, 154
Anisotropie
dun variogramme, 14, 156
de texture, 61
gomtrique, stratie, 14
Apriodique (chane), 117, 120, 123
Approximation Monte Carlo
dun quantile, 113, 220
dune vraisemblance, 228
AR, 28
conditionnelle (CAR), 31, 182
estimation dune, 181
factorisante, 30, 48
simultane (SAR), 28, 181
ARMA, 25
non-stationnaire, 34
stationnaire, 26
Asymptotique, 224
du minimum de contraste, 275
du MV dun champ de Markov, 195
du MV dun PP, 230
du MV pour un PPP, 214
en gostatistique, 161
extensive, 153
intensive, 153, 162
mixte, 162
pour lindice de Moran, 172
pour la PVC dun champ de Markov,
198
pour la PVC dun PP, 227
pour un CAR gaussien, 183
pour un champ stationnaire, 180
pour un rgression spatiale, 187
pour une spcication invariante, 201
Attraction entre points dun PP, 89
Auto-modle, 69
tat mixte, 73
avec covariables, 73
binomial, 71
exponentiel, 72
gaussien, 73
logistique, 70, 247
poissonnien, 71
Autosimilaire (variogramme), 13
Balayage
squentiel, alatoire, 121
bandes tournantes (Mthode des), 143
Baysienne
imagerie, 63
reconstruction, 63
restauration, 80
statistique, 235
304 Index
Bootstrap paramtrique, 163, 203, 224
Brownien (mouvement, drap), 3, 8
Bruit
blanc, 5, 186
color, 31
CAR, 31, 32
estimation, 182, 201, 246
gaussien markovien, 36
identication dun, 181
intrinsque, 242
modle de Gibbs, 73
non-stationnaire, 36
Carte de prdiction, 43, 165
Centrage conditionnel dun champ
(condition), 267
CFTP : coupling from the past, 138
Chane de Markov, 81, 115, 146
apriodique, 117
de Champ de Markov, 76
inhomogne, 130, 252
irrductible, 116
rversible, 118
transition dune, 115
Champ de Gibbs, 57, 79, 96
Champ de Markov, 66, 79, 81
dynamique dun, 76
Champ gaussien markovien, 31, 36
Choleski (dcomposition de), 129, 142
Clique dun graphe, 67, 79, 105, 127
dun PP, 105
Codage, 203
ensemble de, 198
test du chi-2 de, 204, 248
Coecient de mlange, 264
Cohrente (famille de lois), 58
Comptition spatiale, 171
Contiguit spatiale (matrice de), 170
normalise, 170
Continuit (en m.q.), 16
Contraste
additif, 279
Estimateur du minimum, 251, 269
gaussien, 272
pnalis, 163, 181, 207, 281
Processus de, 270
Convolution (Modle de), 19
Coopration spatiale, 171
Corrlation repondre dun PP, 88, 219
Couplage
de chanes de Markov, 138
depuis le pass (CFTP), 140
temps de, 140
Covariance, 2
de Matrn, 12
empirique, 178
exponentielle, 7
extension, restriction, 49
isotropique, 5, 6
reprsentation spectrale, 6
sparable, 19, 23
spatio-temporelle, 22
sphrique, 12
stationnaire, 3, 4
Cox (PP de), 93
Croissance de tache (modle), 131, 249
CSR (Complete Spatial Randomness),
88, 90, 100, 212
Dcalage spatial (modle ), 38, 42
Densit dun PP, 132, 225
conditionnelle, 89
inconditionnelle, 94
Densit spectrale, 6, 7, 24, 31, 179, 263,
272
dun ARMA, 27
des cumulants dordre 4, 181
Direntiabilit (en m.q.), 16
Dispositif exprimental, 47, 185, 271
Distance aux p.p.v., 101, 110, 215
Durbin spatial (modle de), 38, 53
Dynamique
dun champ de Markov, 76, 252
dun systme de particules, 273
dune chane de Markov, 114
de Baker, 124
de Metropolis, 124
de relaxation site par site, 148
estimation dune, 248
spatio-temporelle, 148
Echange de spins, 127
Echantillonneur de Gibbs, 121, 127
alatoire, squentiel, 121
Eacement de points dun PPP, 92
Eets de bord, 154, 178, 217
Ecacits compares, 207
Index 305
Energie, 58
admissible, 58, 71
moyenne, 195, 283
EQNM, 163
Equations simultanes, 29, 30
Ergodicit, 118, 261
Ergodicit gomtrique, 120
Espace exponentiel dun PP, 85
Estimation
dun champ de Markov, 193
dun champ gaussien, 183
dun champ stationnaire, 178
dun processus ponctuel, 212
dune AR, 181
dune auto-corrlation, 170
dune rgression spatiale, 184
dune texture, 196
Estimation dun variogramme
empirique, 156
paramtrique, 158
Exprience numrique, 47
Fonction K de Ripley, 102
estimation, 217
Frontire libre (conditions ), 194
Gaussien
continuit dun processus, 16
processus, 3
Geary (Indice dauto-corrlation de),
174
Gostatistique, 1
estimation, 154
modlisation, 11
simulation, 142
Gibbs (modle de), 55
bivari, 147
latticiel, 57, 79
ponctuel, 96
Graphe dinuence, 35, 170
Graphe de Markov, 37, 67
Hammersley-Cliord, 67, 105, 107
hrditaire (densit dun PP), 96, 132
Hirarchique (modle), 66
linaire gnralis, 238
Homogne (PP), 92
Identiabilit, 30, 35, 58, 157, 160, 198,
226
Identication dun modle, 281
CAR, 181
de Markov, 207
Imagerie baysienne, 63
Indice dauto-corrlation
de Moran, 245
Information de Fisher, 278
conditionnelle, 204
dun champ de Markov, 195
pour une rgression spatiale, 187
Intensit dun PP, 87
conditionnelle, 96, 104, 225
dordre 2, 88
Intrinsque (processus), 8, 151, 154
CAR, 242
Ising (modle d), 59
attractif, 141
Estimation, 205
Simulation, 127, 148
sur graphe irrgulier, 200
Isotropique, 5, 60, 85
Krigeage, 43, 51, 163
baysien, 236
carte de, 46, 165
ordinaire, 45
simple, 43, 146
universel, 44, 237
Kronecker (produit de), 23
Lissage par noyau, 155, 215
localement nie (partie), 84
Log-linaire (modle), 74, 92, 93, 202
Logit (Modle), 70
Loi des grands nombres, 113, 120, 228,
261
au second ordre, 199
Mlange
dun champ, 161, 180, 264
dun PP, 224
Mthode de rejet, 257
pour un PPP, 92
MA, 26, 33
MAP (Maximum a posteriori), 63
Marche alatoire, 116
Matrn (variogramme de), 11
Matrice de transition, 115
primitive, 117
306 Index
Maximum de vraisemblance
dun champ gaussien, 183
dune rgression gaussienne, 187
pour un champ de Markov, 193
pour un PPP, 213
MCMC, 117, 236
Mesure spectrale, 6, 143, 263
Mesures de Palm dun PP, 101
Metropolis, 123, 124, 239
par change de spins, 148
Mobius (formule de), 59
Modle hirarchique, 150, 235
Modle linaire gnralis (MLG), 202
hirarchique, 238
Moindres carrs, 271
quasi gnraliss (MCQG), 186
conditionnels (MCC), 275
gnraliss (MCG), 45, 159, 186, 271
ordinaires (MCO), 30, 158
pondrs (MCP), 159, 271
pour un PP, 223
pour un variogramme, 158
pour une rgression spatiale, 184
Moment rduit dordre 2, 102
estimation, 217
Moments dun PP, 87
Monte Carlo, 113, 163, 174, 220, 228
Moran (Indice dauto-corrlation de),
171
Mosaque de Voronoi, 108
MPM : Maximum posterior mode, 82
Neyman-Scott (PP de), 90
notations, liste de, XV
Noyau de convolution, 19, 155, 215
Noyau dur, 147
PP , 90, 97, 250
sur rseau discret, 119
Nue variographique, 154
Optimalit de Metropolis, 126
Ordre lexicographique, 29
Papangelou (intensit conditionnelle
de), 96, 104
Ppitique (variogramme), 11
Plan dchantillonnage, 47, 240
Plan dexprience, 250
Potentiel, 57, 68, 249
admissible, 57
dinteraction, 57, 79
de porte borne, 58
identiabilit, 58
Potts (Modle de), 62, 80, 82, 242
PP stationnaire, 85
pour la corrlation repondre, 89
Processus
au second ordre, 2, 178
continuit, 16
de contact, 273
de naissance et de mort, 116
direntiabilit, 16
gaussien, 3
intrinsque, 8
linaire, 26
stationnaire, 4
Processus boolen, 86
Processus ponctuel, 83, 92, 212, 263
interaction daire, 100
interaction de connexit, 100
noyau dur, 90, 97
binomial, 90
caractristique dordre 2, 87
de Cox, 93, 134, 224
de bres, 86
de Gibbs, 96
de Neyman-Scott, 90, 224
de saturation de Geyer, 99
de Strauss, 97, 226
de Thomas, 94
densit inconditionnelle, 94
doublement poissonnien, 94, 134
log-gaussien, 93, 134
multivari, 86
Processus ponctuel de Markov, 104
de Baddeley-Mller, 106
de Ripley-Kelly, 104
intensit conditionnelle, 96, 104
Processus ponctuel de Poisson
estimation, 213, 253
homogne, 92
inhomogne, 92
intensit, 92
Processus ponctuel marqu, 86
pseudo-information (Matrice de), 202,
228, 278
Pseudo-transition marginale, 275
Pseudo-vraisemblance, 269
Index 307
conditionnelle, 196, 251
dun CAR gaussien, 197
dun processus ponctuel, 225
gaussienne, 179
marginale, 252, 272
pnalise, 208, 281
poissonnienne, 215
Quadrats (mthode des), 212
Rgression spatiale, 39, 205
estimation dune, 183
Rgularisation (paramtre de), 63
Rpulsion entre points dun PP, 89
Rseau discret, 1, 25, 55, 119, 170, 267
Rgression spatiale
estimation baysienne, 236
Rsidus dun PP, 231
Rabotage des donnes, 178
prol du rabot, 178
Recollement de lois, 56, 78
Recuit simul, 65
Reprsentation spectrale, 6
Robuste (variogramme), 158
Sparable (covariance), 23
SAR, 28, 32
aux plus proches voisins, 37
estimation, 181
factorisant, 51
SARX (SAR avec exogne), 38
Segmentation dimage, 63, 79, 82
Semi dnie positive, 2, 49
Semi-causal (modle), 28
Shot noise process, 94
Simulation, 113, 255
conditionnelle dun PP, 132
dun auto-modle, 128
dun champ de Markov, 126
dun champ gaussien, 142
dun PP, 132
dune chane de Markov, 257
dune dynamique de champ, 131
exacte, 138
gaussienne conditionnelle, 146
par bandes tournantes, 143
par la mthode dinversion, 255
par la mthode de rejet, 257
sous contrainte, 130, 149
Sous ergodicit, 199, 204, 261, 276
Spcication de Gibbs, 58, 59, 96
invariante par translation, 66, 193,
201, 208, 267
Spatio-temporel, 21, 22, 28, 76
Spectrogramme, 179, 272
STARMA, 28
Stationnaire (champ), 3
au second ordre, 4
estimation, 178
strict, 5
Strauss (PP de), 97
noyau dur, 99
Tldtection, 66, 130
TCL, 113
pour champ mlangeant, 266
pour fonctionnelle de champ, 267
pour une chane de Markov, 120
Test
dhomognit spatiale, 212
dindpendance spatiale, 174
disotropie, 205, 248
de minimum de contraste, 280
de Monte Carlo, 176, 220
de permutation, 174
de rapport de PV, 279
de sous-hypothse, 160, 180, 188, 206
du Chi-2 de codage, 204
Texture, 62, 66, 79, 130, 148, 149
estimation dune, 196
Transforme
de Fourrier, 6
de Hankel, 6
Transition, 115, 121
de proposition de changement, 123,
126
invariante, 116
irrductible, 116
matrice de, 115
primitive, 117
rversible, 118
Transition de phase, 58, 60
Triangulation de Delaunay, 108
Validation croise, 163
Validation dun modle
de PP, 224, 230
de variogramme, 163
308 Index
Variation totale (distance en), 117, 134,
265
Variogramme, 8
anisotropique, 14
autosimilaire, 13
de Matrn, 11, 164
estimation, 156
exponentiel, 11
gigogne, 14
ppitique, 11
palier dun, 10
porte dun, 10
puissance, 11
robusti, 158
sphrique, 11
Whittle
pseudo-vraisemblance, 179, 208
Yule-Walker (quations de), 28, 32, 52
D ej` a parus dans la m eme collection
2. P. Joly : Mise en uvre de la methode des elements nis. 1990
3/4. E. Godlewski, P.-A. Raviart : Hyperbolic systems of conservation laws. 1991
5/6. Ph. Destuynder : Modelisation mecanique des milieux continus. 1991
7. J. C. Nedelec : Notions sur les techniques delements nis. 1992
8. G. Robin : Algorithmique et cryptographie. 1992
9. D. Lamberton, B. Lapeyre : Introduction au calcul stochastique applique. 1992
10.
tiques. 1992
11. V. Genon-Catalot, D. Picard : Elements de statistique asymptotique. 1993
12. P. Dehornoy : Complexite et decidabilite. 1993
13. O. Kavian : Introduction `a la theorie des points critiques. 1994
14. A. Bossavit :
Electromagnetisme, en vue de la modelisation. 1994
15. R. Kh. Zeytounian : Modelisation asymptotique en mecanique des uides Newto-
niens. 1994
16. D. Bouche, F. Molinet : Methodes asymptotiques en electromagnetisme. 1994
17. G. Barles : Solutions de viscosite des equations de Hamilton-Jacobi. 1994
18. Q. S. Nguyen : Stabilite des structures elastiques. 1995
19. F. Robert : Les syst`emes dynamiques discrets. 1995
20. O. Papini, J. Wolfmann : Alg`ebre discr`ete et codes correcteurs. 1995
21. D. Collombier : Plans dexperience factoriels. 1996
22. G. Gagneux, M. Madaune-Tort : Analyse mathematique de mod`eles non lineaires
de lingenierie petroli`ere. 1996
23. M. Duflo : Algorithmes stochastiques. 1996
24. P. Destuynder, M. Salaun : Mathematical Analysis of Thin Plate Models. 1996
25. P. Rougee : Mecanique des grandes transformations. 1997
26. L. H ormander : Lectures on Nonlinear Hyperbolic Dierential Equations. 1997
27. J. F. Bonnans, J. C. Gilbert, C. Lemar echal, C. Sagastiz abal : Optimisation
numerique. 1997
28. C. Cocozza-Thivent : Processus stochastiques et abilite des syst`emes. 1997
29. B. Lapeyre,
E. Pardoux, R. Sentis : Methodes de Monte-Carlo pour les equations
de transport et de diusion. 1998
30.
uide incompressible. 1998
31. E. Rio : Theorie asymptotique des processus aleatoires faiblement dependants. 1999
32. J. Moreau, P.-A. Doudin, P. Cazes (Eds.) : Lanalyse des correspondances et les
techniques connexes. 1999
33. B. Chalmond : Elements de modelisation pour lanalyse dimages. 1999
34.
35. P. Robert : Reseaux et les dattente : methodes probabilistes. 2000
36. A. Ern, J.-L. Guermond : Elements nis : theorie, applications, mise en uvre. 2001
37. S. Sorin : A First Course on Zero-Sum Repeated Games. 2002
38. J. F. Maurras : Programmation lineaire, complexite. 2002
1. T. Cazenave, A. Haraux : Introduction aux probl`emes devolution semi-lineaires. 1990
C. Bernardi, Y. Maday : Approximations spectrales de probl`emes aux limites ellip-
P. Sagaut : Introduction ` a la simulation des grandes echelles pour les ecoulements de
J. Istas: Introduction aux modelisations mathematiques pour les sciences du vivant. 2000
39. B. Ycart : Mod`eles et algorithmes Markoviens. 2002
40. B. Bonnard, M. Chyba : Singular Trajectories and their Role in Control Theory. 2003
41. A. Tsybakov : Introdution `a lestimation non-parametrique. 2003
42. J. Abdeljaoued, H. Lombardi : Methodes matricielles Introduction `a la complexite
algebrique. 2004
43. U. Boscain, B. Piccoli : Optimal Syntheses for Control Systems on 2-D Mani-
folds. 2004
44. L. Younes : Invariance, deformations et reconnaissance de formes. 2004
45. C. Bernardi, Y. Maday, F. Rapetti : Discretisations variationnelles de probl`emes
aux limites elliptiques. 2004
46. J.-P. Francoise : Oscillations en biologie : Analyse qualitative et mod`eles. 2005
47. C. Le Bris : Syst`emes multi-echelles : Modelisation et simulation. 2005
48.
49. B. Bid egaray-Fesquet : Hierarchie de mod`eles en optique quantique : De Maxwell-
Bloch `a Schrodinger non-lineaire. 2005
50. R. D ager, E. Zuazua : Wave Propagation, Observation and Control in 1 d Flexible
Multi-Structures. 2005
51. B. Bonnard, L. Faubourg, E. Tr elat Mecanique celeste et controle des vehicules
spatiaux. 2005
52.
de uides visqueux incompressibles. 2005
53. E. Canc` es, C. L. Bris, Y. Maday : Methodes mathematiques en chimie quantique.
Une introduction. 2006
54. J-P. Dedieu : Points xes, zeros et la methode de Newton. 2006
55. P. Lopez, A. S. Nouri : Theorie elementaire et pratique de la commande par les
regimes glissants. 2006
56. J. Cousteix, J. Mauss : Analyse asympotitque et couche limite. 2006
57. J.-F. Delmas, B. Jourdain : Mod`eles aleatoires. 2006
58. G. Allaire : Conception optimale de structures. 2007
59. M. Elkadi, B. Mourrain : Introduction `a la resolution des syst`emes polynomiaux. 2007
60. N. Caspard, B. Leclerc, B. Monjardet : Ensembles ordonnes nis : concepts,
resultats et usages. 2007
61. H. Pham : Optimisation et controle stochastique appliques ` a la nance. 2007
62.
63.
:
C. Gaetan, X . Guyon : Modelisation et statistique spatiales. 2008
A. Henrot, M. Pierre: Variation et optimisation de formes : Une analyse geometric. 2005
F. Boyer, P. Fabrie :El ements danalyse pour letude de quelques mod`eles decoulements
H. Ammari : An Introduction to Mathematics of Emerging Biomedical Imaging. 2008
Vous aimerez peut-être aussi
- Toxoplasmose FinalDocument27 pagesToxoplasmose FinalAzzedine Baka100% (1)
- Guide Technique D'oléiculture - Techniques de Production en OléicultureDocument348 pagesGuide Technique D'oléiculture - Techniques de Production en OléicultureZakaria El Houbi100% (16)
- Précis de télédétection - Volume 3: Traitements numériques d'images de télédétectionD'EverandPrécis de télédétection - Volume 3: Traitements numériques d'images de télédétectionPas encore d'évaluation
- Cours Télédéttction - El Harti PDFDocument142 pagesCours Télédéttction - El Harti PDFIbtiPas encore d'évaluation
- Les Grandes Classes Des BactériesDocument27 pagesLes Grandes Classes Des BactériesZemouli Mohamed100% (1)
- Acquisition Et Traitement de Profils SismiquesDocument9 pagesAcquisition Et Traitement de Profils SismiquesNadjm Eddine BenbouzidPas encore d'évaluation
- Polycopie Rahal FaridDocument30 pagesPolycopie Rahal FaridazerfazPas encore d'évaluation
- Planification SouterrainDocument63 pagesPlanification SouterrainAYOUB CHHAIBIPas encore d'évaluation
- Annales Des Mines Et de La GeologieDocument184 pagesAnnales Des Mines Et de La GeologieNour100% (1)
- 21 Matj2me2Document6 pages21 Matj2me2LETUDIANT100% (1)
- Cours - 2 - Diapo - GéostatistiqueDocument88 pagesCours - 2 - Diapo - Géostatistiqueokaingni jean-claudePas encore d'évaluation
- Résumé de Cour Suites 2bac BIOFDocument1 pageRésumé de Cour Suites 2bac BIOFAbde Aitoutbib86% (7)
- Geostatistique Miniere Chapitre5Document8 pagesGeostatistique Miniere Chapitre5Jean-Paul MwambaPas encore d'évaluation
- These Jilali - 2014 PDFDocument162 pagesThese Jilali - 2014 PDFbioboni0% (1)
- Les Maladies MicrobiennesDocument134 pagesLes Maladies MicrobiennesAmina100% (17)
- Statistiques DescriptivesDocument51 pagesStatistiques Descriptiveselmehdi87100% (1)
- Plan Détaillé TDDocument6 pagesPlan Détaillé TDLime DorPas encore d'évaluation
- Cours Geostatistique Et Interpolation SpatialeDocument85 pagesCours Geostatistique Et Interpolation Spatialekeassemon danielle mondesir100% (2)
- Cours l2 Issgea Teledetection - 014138Document42 pagesCours l2 Issgea Teledetection - 014138Geril Christ HOUMBAPas encore d'évaluation
- Tele Detection Cours 2Document27 pagesTele Detection Cours 2Aziz RITCHATPas encore d'évaluation
- SERIE D'exercices Des Exercices de Cours de GéostatistiqueDocument2 pagesSERIE D'exercices Des Exercices de Cours de Géostatistiquehasnaa azziPas encore d'évaluation
- Ventilation Cours 4Document23 pagesVentilation Cours 4Mourad ChouafPas encore d'évaluation
- KrigeageDocument46 pagesKrigeageAlice BubléPas encore d'évaluation
- Introduction À La Géostatistique Et VariogrammesDocument67 pagesIntroduction À La Géostatistique Et VariogrammesBachirHaider100% (1)
- Geostat ThéorieDocument25 pagesGeostat ThéorieFatima Ezzahra KtaibPas encore d'évaluation
- Cours Stabilité de PentesDocument9 pagesCours Stabilité de PentesHemza MezzoudjPas encore d'évaluation
- Chromitites Bou-AzzerDocument5 pagesChromitites Bou-AzzerIlyasse OuazaPas encore d'évaluation
- D. Goetz - Techniques Dexploitation Et Economie Des Projets Miniers PDFDocument31 pagesD. Goetz - Techniques Dexploitation Et Economie Des Projets Miniers PDFTanguy DoumbiaPas encore d'évaluation
- Techniques Dexploitation Et Economie Des Projets MiniersDocument31 pagesTechniques Dexploitation Et Economie Des Projets Miniersjohn ngandouPas encore d'évaluation
- Programme TP-TD Lt205Document48 pagesProgramme TP-TD Lt205fatimazohra19826509Pas encore d'évaluation
- Chapitre 02 2Document22 pagesChapitre 02 2Ahmed BougheraraPas encore d'évaluation
- An NumeriqueDocument168 pagesAn NumeriquealbahrialiPas encore d'évaluation
- Module de GéophysiqueDocument42 pagesModule de GéophysiqueElmejri HatemPas encore d'évaluation
- La Tectonique33Document10 pagesLa Tectonique33AsmaPas encore d'évaluation
- Les Roches SédimentairesDocument4 pagesLes Roches SédimentairesGoumidi MohamedPas encore d'évaluation
- Geo132 Cartographie 2222 PDFDocument41 pagesGeo132 Cartographie 2222 PDFJunior Chiogo100% (1)
- Stabilité Talus Mines Ciel OuvertDocument229 pagesStabilité Talus Mines Ciel Ouvertmohamedouffa50% (2)
- Méthodemagnétique PDFDocument27 pagesMéthodemagnétique PDFYoussef AL Hamouti100% (1)
- Elément de GéologieDocument48 pagesElément de GéologieChota ChrifPas encore d'évaluation
- SASS Point ScientifiqueDocument17 pagesSASS Point ScientifiqueBigMaherPas encore d'évaluation
- Pfe2009 PDFDocument68 pagesPfe2009 PDFTrippie ReddPas encore d'évaluation
- 33-Conception Géomécanique Des Talus de Mines À Ciel OuvertDocument17 pages33-Conception Géomécanique Des Talus de Mines À Ciel OuvertMassy TraorePas encore d'évaluation
- PFE Khobzi-Laaraj DUT Impact Des Sites Miniers AbandonnerDocument43 pagesPFE Khobzi-Laaraj DUT Impact Des Sites Miniers AbandonnerFadwa LaarajPas encore d'évaluation
- ERDAS FiltresDocument30 pagesERDAS FiltresMouMou OujPas encore d'évaluation
- Estimation de Ressources 17mars2013Document15 pagesEstimation de Ressources 17mars2013josé clid Ekiki100% (1)
- Intégration Numérique EMIDocument20 pagesIntégration Numérique EMInordinatorPas encore d'évaluation
- SEGURET Ouvrage 02516 PDFDocument31 pagesSEGURET Ouvrage 02516 PDFbenwarrenallianceoli100% (1)
- Geoestadísitica LinealDocument124 pagesGeoestadísitica Linealstefa2901Pas encore d'évaluation
- Memoire YoudeDocument48 pagesMemoire YoudeEldo MakelePas encore d'évaluation
- Exercices Krigeage PDFDocument9 pagesExercices Krigeage PDFlepro brunelPas encore d'évaluation
- GLQ3205 - Principes de La Methode Electrique - 1e Partie - 26mai2014Document32 pagesGLQ3205 - Principes de La Methode Electrique - 1e Partie - 26mai2014Asmaa KasmiPas encore d'évaluation
- Arpentage Des Mines - Chapitre 02Document6 pagesArpentage Des Mines - Chapitre 02Leda DalePas encore d'évaluation
- Techniques Dexploitation Et Economie de Projets Miniers PDFDocument31 pagesTechniques Dexploitation Et Economie de Projets Miniers PDFIbrahim TOUREPas encore d'évaluation
- Modélisation Du RéseauDocument66 pagesModélisation Du RéseauMourad Chouaf100% (1)
- Transf Multispectrales PDFDocument21 pagesTransf Multispectrales PDFlynxnetPas encore d'évaluation
- La GeophysiqueDocument5 pagesLa GeophysiqueDaanouni RaniaPas encore d'évaluation
- Paramètre Des Travaux de Forage Et de TirDocument8 pagesParamètre Des Travaux de Forage Et de TirLeda DalePas encore d'évaluation
- Full Course PDFDocument138 pagesFull Course PDFYoussef AL Hamouti100% (1)
- Compte Rendue TP GeophysiqueDocument4 pagesCompte Rendue TP GeophysiqueAnass Ken KelfaPas encore d'évaluation
- Des risques, des mines et des hommes: La perception du risque chez les mineurs de fond de l'Abitibi-TémiscamingueD'EverandDes risques, des mines et des hommes: La perception du risque chez les mineurs de fond de l'Abitibi-TémiscaminguePas encore d'évaluation
- Études sur la géologie, la paléontologie et l'ancienneté de l'homme: Le département de Lot-et-GaronneD'EverandÉtudes sur la géologie, la paléontologie et l'ancienneté de l'homme: Le département de Lot-et-GaronnePas encore d'évaluation
- Évolution des procédés - la séparation de l'air atmosphérique en ses éléments, l'oxygène et l'azoteD'EverandÉvolution des procédés - la séparation de l'air atmosphérique en ses éléments, l'oxygène et l'azotePas encore d'évaluation
- Soutien à la persévérance et à la réussite des jeunes et des adultes en formation professionnelleD'EverandSoutien à la persévérance et à la réussite des jeunes et des adultes en formation professionnellePas encore d'évaluation
- Information GeographiqueDocument15 pagesInformation GeographiquebeteaubePas encore d'évaluation
- Inspection Du PoissonDocument27 pagesInspection Du PoissonAzzedine Baka50% (2)
- Marine Et Marins Dalger (1518-1830) - Moulay BELHAMISSIDocument231 pagesMarine Et Marins Dalger (1518-1830) - Moulay BELHAMISSIAzzedine BakaPas encore d'évaluation
- 09 AFLPsDocument26 pages09 AFLPsAzzedine BakaPas encore d'évaluation
- 6-A96.estampilles ViandesDocument3 pages6-A96.estampilles ViandesAzzedine BakaPas encore d'évaluation
- ToxoplasmoseDocument42 pagesToxoplasmoseAzzedine BakaPas encore d'évaluation
- Echinococcose HydatiqueDocument30 pagesEchinococcose HydatiqueAzzedine BakaPas encore d'évaluation
- Maq-Eaux 08Document60 pagesMaq-Eaux 08Azzedine Baka100% (6)
- Comment Rediger Un Rapport Un Memoire Une TheseDocument100 pagesComment Rediger Un Rapport Un Memoire Une TheseAzzedine BakaPas encore d'évaluation
- ToxoplasmoseDocument42 pagesToxoplasmoseAzzedine BakaPas encore d'évaluation
- Toxines Et Enzymes BacteriennesDocument20 pagesToxines Et Enzymes BacteriennesAzzedine Baka0% (1)
- Regression LinéaireDocument33 pagesRegression LinéaireAimad BenzakryPas encore d'évaluation
- 8-Polynôme de LaguerreDocument1 page8-Polynôme de LaguerrenounousPas encore d'évaluation
- CCP Maths 1 MP 2012 CorrigeDocument4 pagesCCP Maths 1 MP 2012 CorrigemesecPas encore d'évaluation
- Primitives Et IntegrationDocument2 pagesPrimitives Et IntegrationΚαμαλ ελ βαδιϱPas encore d'évaluation
- Analyse Factorielle Des Correspondances de BenzécriDocument7 pagesAnalyse Factorielle Des Correspondances de BenzécriPabloAPachecoPas encore d'évaluation
- Controle Continu Final Automne 2011 Math I Analyse CorrectionDocument5 pagesControle Continu Final Automne 2011 Math I Analyse CorrectionssdsqdPas encore d'évaluation
- TD 3 EnsahDocument2 pagesTD 3 EnsahHicham LoukiliPas encore d'évaluation
- Comp Pop Tests ParametriquesDocument109 pagesComp Pop Tests ParametriquesClosed WayPas encore d'évaluation
- Cours AUT AS M1 SNL PDFDocument12 pagesCours AUT AS M1 SNL PDFChaouki MessasmaPas encore d'évaluation
- Formes DifférentiellesDocument6 pagesFormes DifférentiellesJérémy CochoyPas encore d'évaluation
- Memoire 1-3Document145 pagesMemoire 1-3Farida BatatPas encore d'évaluation
- Travaux Mat LabDocument54 pagesTravaux Mat LabKhaoula ZefanePas encore d'évaluation
- ANOVA1Document32 pagesANOVA1marwaPas encore d'évaluation
- Examen ENSTP 2014Document4 pagesExamen ENSTP 2014dz15dzPas encore d'évaluation
- Numi2 PDFDocument34 pagesNumi2 PDFMoulayMoulyPas encore d'évaluation
- M1EDP PartielDocument2 pagesM1EDP PartielsalimPas encore d'évaluation
- Continuite Resume de Cours 2 PDFDocument2 pagesContinuite Resume de Cours 2 PDFFouad LaamiriPas encore d'évaluation
- Chapitre2 Fonction de Transfert Et Asservissement Echantillonne-2020Document12 pagesChapitre2 Fonction de Transfert Et Asservissement Echantillonne-2020I C H I G OPas encore d'évaluation
- Examens Concours Doctorat LMD Analyse FonctionnelleDocument33 pagesExamens Concours Doctorat LMD Analyse FonctionnelleAdel EnsPas encore d'évaluation
- Corrigé TD5 EX 3 Et 4rDocument10 pagesCorrigé TD5 EX 3 Et 4rElghoul RamziPas encore d'évaluation
- Méthodes de Calcul Des Structures (Théorique)Document17 pagesMéthodes de Calcul Des Structures (Théorique)roma JamanPas encore d'évaluation
- AATstmg Ch03 - Les Suites PDFDocument10 pagesAATstmg Ch03 - Les Suites PDFBadara Aliou KonePas encore d'évaluation
- 2019 TD09 DerivationDocument2 pages2019 TD09 DerivationDoshey AllouPas encore d'évaluation
- Utilization of Ion-Associate Formation in Conductimetric DeterminationDocument9 pagesUtilization of Ion-Associate Formation in Conductimetric DeterminationRaafat FarghalyPas encore d'évaluation
- Mini ProjetDocument9 pagesMini ProjetIslam LakatPas encore d'évaluation
- Analyse III Et IV 2016 - 2017 Cours Chapitre IVDocument14 pagesAnalyse III Et IV 2016 - 2017 Cours Chapitre IVevilievPas encore d'évaluation
- CNC 2018 Math-1 TSI CorrectionDocument9 pagesCNC 2018 Math-1 TSI Correctionalnej222Pas encore d'évaluation
- 5-Fonction Digamma CorrectionDocument10 pages5-Fonction Digamma Correctionfrançois dupontPas encore d'évaluation