Chapitre 5 Navigation vers un but
Nous dcrivons ici des mthodes de navigation correspondant aux deux premires catgories de stratgies de navigation dnies dans le chapitre 2.
5.1
Vhicules de Braitenberg
Dans son livre Vehicles : Experiments in Synthetic Psychology, Valentino Braitenberg dcrit une srie dexpriences dans lesquelles des robots extrmement simples peuvent montrer des comportements complexes, quun observateur humain associe en gnral diffrents types dmotions telles que la peur ou lagression. Nous nous intressons ici simplement la structure de ces robots, qui permet de raliser simplement des comportements pour rejoindre un but visible. Cette structure est devenue larchtype des mthodes ractives simples.
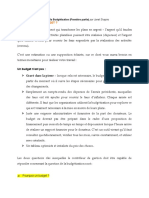
But
C2 C1
F IG . 5.1: Dans les vhicules de Braitenberg, la vitesse de chacun des deux moteurs du robot dpend de la valeurs de deux capteurs qui dtectent la lumire mise par le but.
Dans le livre de Braitenberg, le but est matrialis par une lumire, visible de55
56
CHAPITRE 5. NAVIGATION VERS UN BUT
puis tout lenvironnement. Le robot est simplement une plate-forme diffrentielle, constitue de deux roues dont on commande les vitesses de rotation et munie de deux capteurs de lumire situs de part et dautre de lavant du robot (Figure 5.1). Larchitecture interne du robot est simplement constitue de liens entre ces capteurs et les moteurs qui permettent de calculer la vitesse des moteurs en fonction des valeurs des capteurs. En faisant varier les paramtres des connexions, il est alors possible de dnir diffrents comportements du robot. Si la vitesse de chaque moteur est relie la valeur du capteur du cot oppos avec un coefcient positif, le robot se dirigera naturellement vers le but. Si, par contre, la vitesse de chaque moteur est relie la valeur du capteur du mme cot avec un coefcient positif, le robot fuira le but. Ces vhicules ralisent simplement une remonte ou une descente de gradient sur lintensit de la lumire. Ils correspondent un simple contrleur proportionnel en automatique et sont donc relativement sujets des oscillations dans le comportement du robot. Ils supposent de plus que le but est visible depuis tout lenvironnement, ce qui est rarement le cas en pratique. Ce modle est donc intressant car cest la mthode la plus simple possible pour raliser un dplacement vers un but, mais est difcile utiliser dans une application relle.
5.2
Modle de Cartwright et Collet
Ce modle, le snapshot model a t conu pour expliquer comment des abeilles peuvent utiliser des informations visuelles pour rejoindre un point donn de lenvironnement. Il permet un robot de rejoindre un but dont la position est dnie par la conguration damers de lenvironnement autour de ce but.
Amer Amer
Amer
F IG . 5.2: Exemple de snapshot caractrisant la position du but. Le robot mmorise un panorama contenant la position et la taille apparente des amers.
5.2. MODLE DE CARTWRIGHT ET COLLET
57
Le systme perceptif du robot doit lui permettre de dtecter la direction et la taille des amers autour de lui. Le robot commence par mmoriser le but en enregistrant la conguration des amers vus depuis la position de ce but (un snapshot, Figure 5.2).
Perception courantes
Perceptions depuis le but
F IG . 5.3: Pour atteindre le but, chaque amer peru est associ un des amers mmoriss. Pour chaque appariement, on dduit un vecteur tangentiel dont la norme augmente avec lcart entre amer perus et mmoriss. La somme de ces vecteurs donne la direction prendre pour atteindre le but.
Lorsque, par la suite, le robot veut rejoindre ce but, il prend une nouvelle image des amers et, par comparaison entre la conguration courante et la conguration mmorise au but, il peut dduire de manire trs simple la direction dans laquelle se dplacer pour atteindre le but. Cette comparaison est base sur un appariement entre les amers perus et les amers mmoriss, chaque appariement permettant de calculer un vecteur dont la somme, pour tout les appariements damers, donne la direction prendre pour rejoindre le but (Figure 5.3). Le robot effectue alors un dplacement de longueur xe dans cette direction puis recommence le processus tant que le but nest pas atteint. L encore, le systme est trs simple et ralise une descente de gradient sur la conguration des amers an datteindre le but. Il ne fonctionne cependant pas sur lensemble de lenvironnement et la qualit du comportement obtenu dpend beaucoup de la conguration des amers qui sont utiliss, un ensemble damers lointains et bien rpartis tout autour du robot donnant les meilleurs rsultats. La qualit de lappariement entre les amers est galement primordiale, en effet, si un amer peru est associ au mauvais amer mmoris, le vecteur de dplacement dduit sera faux. Le modle original supposait des amers noirs sur fond blanc, sans identit particulire, pour lequel lappariement est relativement hasardeux. Il nest donc pas applicable en pratique. Dautres travaux ont utilis des amers colors et diffrentes contraintes sur lappariement qui permettent une meilleur robustesse et sont donc applicables des robots rels. La plupart des implantations de ce modles supposent de plus que la direction
58
CHAPITRE 5. NAVIGATION VERS UN BUT
du robot est connue an de faciliter lappariement. Avoir une estimation correcte de cette direction peut se rvler difcile en pratique.
Vous aimerez peut-être aussi
- Gilles Deleuze QuEstce Que Fonder 1956Document124 pagesGilles Deleuze QuEstce Que Fonder 1956ahmed aden100% (2)
- KH BL Rousset Forme Et Signification PDFDocument11 pagesKH BL Rousset Forme Et Signification PDFMohamedDjihadPas encore d'évaluation
- MQ01 PolyDocument77 pagesMQ01 Polyqzm74lPas encore d'évaluation
- Psychologie CoursDocument27 pagesPsychologie Coursqzm74l100% (1)
- Toute Les Lettre de MotivationDocument76 pagesToute Les Lettre de Motivationqzm74l100% (1)
- La ProxémieDocument5 pagesLa Proxémieqzm74l100% (1)
- Calculer Le TRSDocument2 pagesCalculer Le TRSqzm74l100% (1)
- 50 Lettres de MotivationDocument81 pages50 Lettres de Motivationqzm74l100% (1)
- VocabulaireDocument4 pagesVocabulaireqzm74l100% (1)
- JCL20070315v1.3 Guide D'application INVOIC OPTO v33 (French)Document19 pagesJCL20070315v1.3 Guide D'application INVOIC OPTO v33 (French)qzm74lPas encore d'évaluation
- Herve Ryssen - Les Origines Religieuses Du Mondialisme (Juifs, Judaisme, Sionisme, Mondialisation, Capitalisme, Communisme)Document50 pagesHerve Ryssen - Les Origines Religieuses Du Mondialisme (Juifs, Judaisme, Sionisme, Mondialisation, Capitalisme, Communisme)qzm74l100% (1)
- Plaquette Evaluation LogistiqueDocument2 pagesPlaquette Evaluation Logistiqueqzm74lPas encore d'évaluation
- La Planification Des Besoins MatièresDocument63 pagesLa Planification Des Besoins Matièresqzm74l100% (1)
- La Douane Et Les Incoterms 2010Document5 pagesLa Douane Et Les Incoterms 2010qzm74lPas encore d'évaluation
- Plusieurs Objets 2Document25 pagesPlusieurs Objets 2Désiré NgaryadjiPas encore d'évaluation
- BOISDocument1 pageBOISAmina NEFLAPas encore d'évaluation
- Analyse 4Document30 pagesAnalyse 4DiGui6150Pas encore d'évaluation
- Méthodologie - Dissertation - Commentaire D'arrêtDocument10 pagesMéthodologie - Dissertation - Commentaire D'arrêtRazPas encore d'évaluation
- Fortinet FleXosDocument20 pagesFortinet FleXosWassim El MririePas encore d'évaluation
- Master PDFDocument6 pagesMaster PDFTaher HarrouchiPas encore d'évaluation
- Evaluation Diagnostique Typologie TextuelleDocument7 pagesEvaluation Diagnostique Typologie TextuelleTania BelhachemiPas encore d'évaluation
- L'organisation Relation ClientDocument59 pagesL'organisation Relation ClientChristophe RouxPas encore d'évaluation
- Prospectus Biar Algeria355Document12 pagesProspectus Biar Algeria355Lilia DjaffarPas encore d'évaluation
- Setting Report 220108 V1.0.en - fr-1Document11 pagesSetting Report 220108 V1.0.en - fr-1Christophe baudouxPas encore d'évaluation
- Décadence D'athènesDocument2 pagesDécadence D'athènesKyuriPas encore d'évaluation
- NF en ISO 4066 Dessins de Bâtiment Et Génie Civil Cahiers de FerraillagesDocument10 pagesNF en ISO 4066 Dessins de Bâtiment Et Génie Civil Cahiers de Ferraillagesalmabetce100% (1)
- 1 Cours PLDocument34 pages1 Cours PLYahya AalailaPas encore d'évaluation
- Série Procédures Et Fonctions - CorrDocument13 pagesSérie Procédures Et Fonctions - CorrMohamed SaidiPas encore d'évaluation
- Offre TechniqueDocument2 pagesOffre TechniqueMardochet TolokaPas encore d'évaluation
- La Nature DévoiléeDocument184 pagesLa Nature DévoiléeJan-Pier OUADJIE100% (1)
- Les Outils de QualitéDocument11 pagesLes Outils de QualitéMouna EssaouiadPas encore d'évaluation
- II. Les Racines Carrees Et CubiquesOKDocument7 pagesII. Les Racines Carrees Et CubiquesOKEsther NatountodePas encore d'évaluation
- Fonctions RecusivesDocument16 pagesFonctions RecusivesYtr MlkPas encore d'évaluation
- Iso 17025 ProgrammeDocument4 pagesIso 17025 ProgrammeAbderrahman HanounePas encore d'évaluation
- HelloDocument3 pagesHelloعادل الحمديPas encore d'évaluation
- RIELMA No6 2013Document196 pagesRIELMA No6 2013Jack MiPas encore d'évaluation
- ÉlectriqueDocument49 pagesÉlectriqueAyoub Fajraoui100% (1)
- BudgétisationDocument9 pagesBudgétisationSaad JamaaPas encore d'évaluation
- Ec 2 PDFDocument30 pagesEc 2 PDFOssama MakaveliPas encore d'évaluation
- Meca d1 PDFDocument158 pagesMeca d1 PDFAladin ZeribiPas encore d'évaluation
- Surveillés Et Consentants: Compréhension Des Écrits 25 PointsDocument3 pagesSurveillés Et Consentants: Compréhension Des Écrits 25 PointsMai NguyenPas encore d'évaluation
- Examens PlaquesDocument3 pagesExamens Plaquesbadri100% (1)