Vous aimerez peut-être aussi
- TP04 OodiraDocument6 pagesTP04 Oodiraharoun kabiliPas encore d'évaluation
- TP4 OdiraDocument7 pagesTP4 Odiraharoun kabiliPas encore d'évaluation
- Polycopie-Tp-Système Microcontroleur 2023Document35 pagesPolycopie-Tp-Système Microcontroleur 2023Zineb LamraniPas encore d'évaluation
- Modulation de Largeur D'impultion (Mli) IDocument11 pagesModulation de Largeur D'impultion (Mli) IAnaddam ImanePas encore d'évaluation
- Formation STM32 PWMDocument5 pagesFormation STM32 PWMHaythem Chaoued0% (2)
- Polycopie-Tp-68hc11 2023 VFFDocument37 pagesPolycopie-Tp-68hc11 2023 VFFZineb LamraniPas encore d'évaluation
- Corrigé TD N°5Document16 pagesCorrigé TD N°5Abir HammamiPas encore d'évaluation
- chapitre5Document19 pageschapitre5Fatima MeskPas encore d'évaluation
- Compte Rendu Syst Embarqué FinalDocument44 pagesCompte Rendu Syst Embarqué FinalHIHI KHALIDPas encore d'évaluation
- Chapitre Vi Generation Des Signaux PWM: 1-IntroductionDocument7 pagesChapitre Vi Generation Des Signaux PWM: 1-Introductionrayenkr03Pas encore d'évaluation
- DS2019Document11 pagesDS2019Charles Thierry DIBAO ESSAKAPas encore d'évaluation
- 02-Document Ressource Configuration Broche PWMDocument3 pages02-Document Ressource Configuration Broche PWMnawzatPas encore d'évaluation
- Cours PWMDocument43 pagesCours PWMzakarii67% (3)
- uC_p4Document24 pagesuC_p4abdel.bouyakhlefPas encore d'évaluation
- Gestion Du TempsDocument6 pagesGestion Du TempsJassem NasarPas encore d'évaluation
- TD Adc pwm2021Document1 pageTD Adc pwm2021haddoudiamenPas encore d'évaluation
- Rapport Des Travaux PratiquesDocument33 pagesRapport Des Travaux PratiquesYassir EL AYYADIPas encore d'évaluation
- FE - Rapport TP2 FormulaireDocument4 pagesFE - Rapport TP2 FormulaireAbir AbirPas encore d'évaluation
- Mode PWM Des Pic16f87xDocument2 pagesMode PWM Des Pic16f87xCrystal Lopez100% (1)
- M 25 Instrumentation Numerique 2Document23 pagesM 25 Instrumentation Numerique 2Abdelkoddous LhajoujiPas encore d'évaluation
- PWMDocument11 pagesPWMYOKO SawaPas encore d'évaluation
- Bloc Temporisateur TSXDocument2 pagesBloc Temporisateur TSXAyoub AyayPas encore d'évaluation
- 8 Convertisseur Adc DacDocument11 pages8 Convertisseur Adc Dacmiss théciPas encore d'évaluation
- MM2001Document18 pagesMM2001souriPas encore d'évaluation
- TP EA02 AsservissementDocument14 pagesTP EA02 AsservissementnguyenrobotPas encore d'évaluation
- Cours 3A Demodulation AMDocument8 pagesCours 3A Demodulation AMlolitaaaa100% (1)
- Exercice Api Pid Ex200Document3 pagesExercice Api Pid Ex200saaidPas encore d'évaluation
- Cours de PIC Timers PDFDocument5 pagesCours de PIC Timers PDFSamir Fassi FassiPas encore d'évaluation
- TP 3Document8 pagesTP 3Amina QaddouriPas encore d'évaluation
- 6 PWMDocument5 pages6 PWMbtssnaPas encore d'évaluation
- Chapitre 8 Convertisseur Adc DacDocument9 pagesChapitre 8 Convertisseur Adc DacMedPas encore d'évaluation
- TECH6 Fonction RetardDocument7 pagesTECH6 Fonction RetarddonsallusPas encore d'évaluation
- Examen Partiel 2019Document9 pagesExamen Partiel 2019Fatima EzzahraPas encore d'évaluation
- TP Mod FreqDocument8 pagesTP Mod Freqhaha2012Pas encore d'évaluation
- Exercice 2 Régulation PIDDocument6 pagesExercice 2 Régulation PIDMohammed Amine KenedPas encore d'évaluation
- Variateur de Vitesse Pour Moteur MonophaséDocument9 pagesVariateur de Vitesse Pour Moteur MonophaséJIHENE GHAOUIPas encore d'évaluation
- Essais de Systemes: Asservissement: Moteur À Courant ContinuDocument2 pagesEssais de Systemes: Asservissement: Moteur À Courant ContinuWael AlouiPas encore d'évaluation
- Pr. Abdelouahid Lyhyaoui: Ensa de Tanger / Cycle - Ingénieur Tps. TélécomsDocument6 pagesPr. Abdelouahid Lyhyaoui: Ensa de Tanger / Cycle - Ingénieur Tps. TélécomsSalah EddinePas encore d'évaluation
- TD TimerDocument6 pagesTD Timersaid larguetPas encore d'évaluation
- Rapport de La Simulation Du TPDocument11 pagesRapport de La Simulation Du TPmohamed oukiliPas encore d'évaluation
- Filtrage NumeriqueDocument4 pagesFiltrage Numeriquetarek27Pas encore d'évaluation
- TECH6 Fonction Retard PDFDocument7 pagesTECH6 Fonction Retard PDFYahya BouaalalaPas encore d'évaluation
- MCIL3 - C - Chapitre 7 - IIDocument8 pagesMCIL3 - C - Chapitre 7 - IITurbo NSXPas encore d'évaluation
- Modulation Par ImpultiionDocument17 pagesModulation Par ImpultiionZH HamzaPas encore d'évaluation
- Modem FSKDocument7 pagesModem FSKHasnae MoumniPas encore d'évaluation
- TP 2 Modulation Démodulation de Fréquence FMDocument7 pagesTP 2 Modulation Démodulation de Fréquence FMAbdelmadjid Youcefa100% (1)
- Ds Ea3Document2 pagesDs Ea3Ayoub AyayPas encore d'évaluation
- Cours de PIC Convertisseur AnDocument11 pagesCours de PIC Convertisseur AnHamoù Krc SémcheddiinePas encore d'évaluation
- Exercice Api Pid Ex1 SolutionDocument10 pagesExercice Api Pid Ex1 SolutionsaaidPas encore d'évaluation
- Travaux Pratiques 2Document4 pagesTravaux Pratiques 2Cha Bnr100% (1)
- Exo2 - CAN CNADocument8 pagesExo2 - CAN CNAYounes Raache67% (3)
- Aii2a Exercice Api2 Ex1Document2 pagesAii2a Exercice Api2 Ex1Fouad Ech-chahbiPas encore d'évaluation
- Commande PWM MoteursDocument5 pagesCommande PWM MoteurszaidifaroukPas encore d'évaluation
- TP5 FM 2022Document2 pagesTP5 FM 2022RaghadPas encore d'évaluation
- 7-Changement de Frequence PDFDocument45 pages7-Changement de Frequence PDFMohammed Amine Halbaba100% (1)
- TPMat LabDocument4 pagesTPMat LabAmine AlaouiPas encore d'évaluation
- exercices-modulationDocument4 pagesexercices-modulationFabiol TchiffoPas encore d'évaluation
- TD Les CapteursDocument4 pagesTD Les Capteursayoub270475% (4)
- CAN Avec Le PICDocument2 pagesCAN Avec Le PICayoub2704Pas encore d'évaluation
- Cours 4Document40 pagesCours 4souheil_souPas encore d'évaluation
- Ch3 MemoireDocument77 pagesCh3 Memoireayoub2704Pas encore d'évaluation
- Correction 10Document8 pagesCorrection 10ayoub2704Pas encore d'évaluation
- Algo Part 1Document55 pagesAlgo Part 1ayoub2704Pas encore d'évaluation
- Ls 00 AcoursDocument11 pagesLs 00 Acoursayoub2704Pas encore d'évaluation
- Algo Imsi TDDocument3 pagesAlgo Imsi TDamel_dbibaPas encore d'évaluation
- Ed2 Complexite CorrDocument5 pagesEd2 Complexite Corrayoub2704Pas encore d'évaluation
- Repr en Virg FlotDocument6 pagesRepr en Virg Flotayoub2704Pas encore d'évaluation
- Cybercriminalite Au MarocDocument155 pagesCybercriminalite Au Marocam9ranPas encore d'évaluation
- Ex Oskar NaughDocument6 pagesEx Oskar Naughayoub2704Pas encore d'évaluation
- Soft WarDocument2 pagesSoft Warayoub2704Pas encore d'évaluation
- Exercice SDocument16 pagesExercice Sayoub2704Pas encore d'évaluation
- Algo T1Document129 pagesAlgo T1Midou TounsiPas encore d'évaluation
- Structures DonneesDocument146 pagesStructures DonneesŊassim NEPas encore d'évaluation
- Apprendre Redux Et Redux Toolkit Pour ReactDocument8 pagesApprendre Redux Et Redux Toolkit Pour ReactMoris MbounPas encore d'évaluation
- Un - Syst - Me - Microprocesseur - PDF Filename - UTF-8''Un Système À MicroprocesseurDocument11 pagesUn - Syst - Me - Microprocesseur - PDF Filename - UTF-8''Un Système À MicroprocesseurLynda MOKRANIPas encore d'évaluation
- Formation PHPDocument6 pagesFormation PHPDodji EDOUPas encore d'évaluation
- PréparationDocument14 pagesPréparationDakhla AyoubPas encore d'évaluation
- 2201 AUT 103 SED Cours v1.0Document294 pages2201 AUT 103 SED Cours v1.0Wissem AbderrahmenPas encore d'évaluation
- TP RéseauDocument2 pagesTP RéseauChristina J. HaPas encore d'évaluation
- Guide Internet Everywhere Cle USB HUAWEI E160Document12 pagesGuide Internet Everywhere Cle USB HUAWEI E160matmatijamelPas encore d'évaluation
- Introduction J2EEDocument38 pagesIntroduction J2EESalka HarmassPas encore d'évaluation
- Cours Calcul Parallele Partie 21Document53 pagesCours Calcul Parallele Partie 21HaJaR ChaBbouTPas encore d'évaluation
- 1-Dis 42020Document42 pages1-Dis 42020douina aroukPas encore d'évaluation
- Comment Un Live Migration Peut Vous Donner Des Cheveux Blancs - Keep Calm and Be CloudDocument22 pagesComment Un Live Migration Peut Vous Donner Des Cheveux Blancs - Keep Calm and Be CloudAnonymous 1P2S4tbMPas encore d'évaluation
- TD Séquence2Document3 pagesTD Séquence2Chérif SECKPas encore d'évaluation
- Correction TD 1Document5 pagesCorrection TD 1noubissi pascakPas encore d'évaluation
- CC N°2 BUREATIQUE AVANCéDocument5 pagesCC N°2 BUREATIQUE AVANCéggqgj56Pas encore d'évaluation
- Cours Chapitre 3 SNTDocument3 pagesCours Chapitre 3 SNTchloclolittlePas encore d'évaluation
- Correction TD1Document2 pagesCorrection TD1hamnouche houcinePas encore d'évaluation
- Constructeur Par Défaut Constructeur Par Défaut Par DéfautDocument2 pagesConstructeur Par Défaut Constructeur Par Défaut Par DéfautGhassen BenjannetPas encore d'évaluation
- Emploi - S1 - Electronique - 2022 - 2023 v2Document3 pagesEmploi - S1 - Electronique - 2022 - 2023 v2med limamePas encore d'évaluation
- 3 - Configuration LogicielleDocument65 pages3 - Configuration LogicielleAbdou OuChPas encore d'évaluation
- La Liaison Série PDFDocument20 pagesLa Liaison Série PDFOumarPas encore d'évaluation
- SquidDocument4 pagesSquidAbdRahimPas encore d'évaluation
- Raccourcis ClavierDocument11 pagesRaccourcis ClavierKomlan Laurent AyenaPas encore d'évaluation
- Développement D'Applications Web: Formation Aide Ingénieur-InfoDocument18 pagesDéveloppement D'Applications Web: Formation Aide Ingénieur-Infoaoued safaPas encore d'évaluation
- Présentation Powerpoint BD DAS PCT MALAN G004Document19 pagesPrésentation Powerpoint BD DAS PCT MALAN G004KEITA ALINE-DJAMILATHEPas encore d'évaluation
- TP3 Installer Un Serveur DNS Sous LinuxDocument6 pagesTP3 Installer Un Serveur DNS Sous LinuxNesrinePas encore d'évaluation
- Correction Examen Big Data 2020 2021 Session NormaleDocument4 pagesCorrection Examen Big Data 2020 2021 Session NormaleNora Habrich88% (8)
- Module 10 Attribution de Rôles de Serveur Et de Base de DonnéesDocument25 pagesModule 10 Attribution de Rôles de Serveur Et de Base de DonnéesJozef LouznaPas encore d'évaluation
- Cours PHPDocument191 pagesCours PHPBrice AboloPas encore d'évaluation
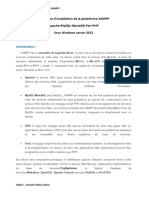
- Procédure Installation Plateforme XAMPP Sous Windows Server 2012Document12 pagesProcédure Installation Plateforme XAMPP Sous Windows Server 2012جطو محمد الامينPas encore d'évaluation
- Voyage en Biochimie PDFDocument76 pagesVoyage en Biochimie PDFmartin jack100% (1)