Vous aimerez peut-être aussi
- Videojet RCCM WP v7 CS5 FRDocument10 pagesVideojet RCCM WP v7 CS5 FRMa HdiPas encore d'évaluation
- 2247 D3302-FPDocument2 pages2247 D3302-FPMa HdiPas encore d'évaluation
- NO-Outils Et MéthodesDocument6 pagesNO-Outils Et MéthodesLoTfi GarZounPas encore d'évaluation
- ProjinveDocument22 pagesProjinvemimita16Pas encore d'évaluation
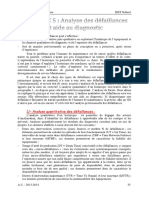
- Chapitre 5 Analyse Des Defaillances Et Aide Au DiagnosticDocument16 pagesChapitre 5 Analyse Des Defaillances Et Aide Au DiagnosticsisoPas encore d'évaluation
- 2247 D3302-FPDocument2 pages2247 D3302-FPMa HdiPas encore d'évaluation
- AMDEC Sur BroyeurDocument55 pagesAMDEC Sur BroyeurFatima-zahra Lezar81% (16)
- Diagnostic Et Audit de La MaintenanceDocument20 pagesDiagnostic Et Audit de La MaintenanceAbdennacer Htt100% (3)
- Rapport de Stage Pfe Sogea MarocDocument72 pagesRapport de Stage Pfe Sogea Maroctaha60% (5)
- White Paper Maintenance 08062015Document23 pagesWhite Paper Maintenance 08062015Anouar RaquibPas encore d'évaluation
- 1 Tutorial Corps de VanneDocument12 pages1 Tutorial Corps de VanneMa HdiPas encore d'évaluation
- USER Manual V1.0 FRDocument13 pagesUSER Manual V1.0 FROumaima AkilPas encore d'évaluation
- Rapportpfe 140113023621 Phpapp01 PDFDocument97 pagesRapportpfe 140113023621 Phpapp01 PDFMa HdiPas encore d'évaluation
- Projet de Fin D'Etudes: Amélioration de La Zone de Fabrication Des Joints D'étanchéitéDocument79 pagesProjet de Fin D'Etudes: Amélioration de La Zone de Fabrication Des Joints D'étanchéitéMa HdiPas encore d'évaluation
- Methode D Elaboration de La Maintenance Preventive D Un Equipement PDFDocument38 pagesMethode D Elaboration de La Maintenance Preventive D Un Equipement PDFMa HdiPas encore d'évaluation
- Essai de Dimensionnement D'un - JABKHIRO Hajar - 2509Document46 pagesEssai de Dimensionnement D'un - JABKHIRO Hajar - 2509Wa FaPas encore d'évaluation
- Methode D Elaboration de La Maintenance Preventive D Un Equipement PDFDocument38 pagesMethode D Elaboration de La Maintenance Preventive D Un Equipement PDFMa HdiPas encore d'évaluation
- Pfe Amdec Machine PDFDocument77 pagesPfe Amdec Machine PDFSoufianeBattal50% (6)
- White Paper Maintenance 08062015Document23 pagesWhite Paper Maintenance 08062015Anouar RaquibPas encore d'évaluation
- Formation Emt CalcechDocument2 pagesFormation Emt CalcechMa HdiPas encore d'évaluation
- Projet de Fin D'Etudes: Amélioration de La Zone de Fabrication Des Joints D'étanchéitéDocument79 pagesProjet de Fin D'Etudes: Amélioration de La Zone de Fabrication Des Joints D'étanchéitéMa HdiPas encore d'évaluation
- 1 Tutorial Corps de VanneDocument12 pages1 Tutorial Corps de VanneMa HdiPas encore d'évaluation
- Methode D Elaboration de La Maintenance Preventive D Un Equipement PDFDocument38 pagesMethode D Elaboration de La Maintenance Preventive D Un Equipement PDFMa HdiPas encore d'évaluation
- Elaboration Et Mise en Place D - EL JEMLI Anass - 2921Document81 pagesElaboration Et Mise en Place D - EL JEMLI Anass - 2921Ma Hdi100% (1)
- MBF-Etude de CasDocument21 pagesMBF-Etude de Casdolokhov100% (3)
- Mise en Place de La Methode AM - EL-ALLAM Taoufik - 2418Document52 pagesMise en Place de La Methode AM - EL-ALLAM Taoufik - 2418Ma Hdi100% (1)
- Pfe Amdec Machine PDFDocument77 pagesPfe Amdec Machine PDFSoufianeBattal50% (6)
- Chapitre 2Document13 pagesChapitre 2Ma HdiPas encore d'évaluation
- Etude de La Fiabilite de La Po - ZARRIK Amal - 587Document66 pagesEtude de La Fiabilite de La Po - ZARRIK Amal - 587Ma HdiPas encore d'évaluation
- 1 Tutorial Corps de VanneDocument12 pages1 Tutorial Corps de VanneMa HdiPas encore d'évaluation
- Caplp Externe Genie Electrique Electrotechnique Et Energie Epreuve 1 Doc RessourcesDocument28 pagesCaplp Externe Genie Electrique Electrotechnique Et Energie Epreuve 1 Doc RessourcesOus SàmàPas encore d'évaluation
- Tube VentouriDocument10 pagesTube VentouriMohammed BoulbairPas encore d'évaluation
- Correction DevoirDeSyntheseN3 1AS 2009 FinDocument8 pagesCorrection DevoirDeSyntheseN3 1AS 2009 FinMehdi Ben Arif67% (3)
- Depliant ELM MasterDocument3 pagesDepliant ELM MasterYazid AbouchihabeddinePas encore d'évaluation
- Format Eur FrancaiseDocument1 pageFormat Eur FrancaiseAdnan NandaPas encore d'évaluation
- Af Sen GaeDocument42 pagesAf Sen GaeعبداللهبنزنوPas encore d'évaluation
- Chapitre 1 LES OUTILS MATHEMATIQUESDocument9 pagesChapitre 1 LES OUTILS MATHEMATIQUESa.ddPas encore d'évaluation
- AnnexeDocument168 pagesAnnexeMoez AliPas encore d'évaluation
- RSE & EthiqueDocument6 pagesRSE & Ethiquealemor2369Pas encore d'évaluation
- Arval - Cofrastra 40Document16 pagesArval - Cofrastra 40helder.fradePas encore d'évaluation
- 2nd - Exercices Corrigés - Variations D'une FonctDocument1 page2nd - Exercices Corrigés - Variations D'une Fonctalyahmed610Pas encore d'évaluation
- Mesure de Compression Moteur Vers FinaleDocument46 pagesMesure de Compression Moteur Vers FinaleRaouf HarzallahPas encore d'évaluation
- Process AciérieDocument6 pagesProcess Aciériesanae jaouiPas encore d'évaluation
- Jadwal Genap 2223-2Document2 pagesJadwal Genap 2223-2nowo benyPas encore d'évaluation
- Marry Your Daughter Sheet - 1Document2 pagesMarry Your Daughter Sheet - 1Nurendung ZuliantoPas encore d'évaluation
- Exercice D'application Optique VDocument1 pageExercice D'application Optique VARDALAn MohamedPas encore d'évaluation
- Calendrier Des Examens Semestre Impair Janvier 2022 AlphaDocument28 pagesCalendrier Des Examens Semestre Impair Janvier 2022 AlphaMeg JustMegPas encore d'évaluation
- Observons:: Nature Du Complément Circonstanciel de TempsDocument2 pagesObservons:: Nature Du Complément Circonstanciel de TempsMehdi YMPas encore d'évaluation
- Thèse Data IntegrityDocument83 pagesThèse Data IntegrityBasma YagoubiPas encore d'évaluation
- The Cuban Missile CrisisDocument8 pagesThe Cuban Missile Crisismilan.bodis523Pas encore d'évaluation
- Observatoire National de La Filiere Riz Du Burkina Faso (Onriz)Document6 pagesObservatoire National de La Filiere Riz Du Burkina Faso (Onriz)toni_yousf2418Pas encore d'évaluation
- Exposé MDE Et Énergie RenouvelablesDocument12 pagesExposé MDE Et Énergie Renouvelablesromain fokamPas encore d'évaluation
- Cahier D Exercices Ile Aux Mots 8hDocument88 pagesCahier D Exercices Ile Aux Mots 8hCizPas encore d'évaluation
- Controle Et Suivi Chantier RoutierhjhDocument14 pagesControle Et Suivi Chantier Routierhjhعثمان البريشيPas encore d'évaluation
- Les Étapes de Formation Des Roches SédimentaireDocument2 pagesLes Étapes de Formation Des Roches Sédimentairehamada2002Pas encore d'évaluation
- TP2Document4 pagesTP2Youssef Don RajawiPas encore d'évaluation
- 3 Partie Caractéristiques Des LubrifiantDocument32 pages3 Partie Caractéristiques Des Lubrifiantsamir belamriPas encore d'évaluation
- Memoire Inj Messaoud BENZOUAIDocument168 pagesMemoire Inj Messaoud BENZOUAIManong ShegueyPas encore d'évaluation
- ALIZE LCPC MU v1.5 FR PDFDocument116 pagesALIZE LCPC MU v1.5 FR PDFSoumana Abdou100% (1)
- Introduction À La RobotiqueDocument19 pagesIntroduction À La RobotiqueRazzougui SarahPas encore d'évaluation