Vous aimerez peut-être aussi
- RC Travaux RP4201Document19 pagesRC Travaux RP4201Abdelghani BouaddiPas encore d'évaluation
- Rapport Abdelghani Bouaddi Hamza CherquiDocument50 pagesRapport Abdelghani Bouaddi Hamza CherquiAbdelghani Bouaddi100% (1)
- 5460000Document54 pages5460000Abdelghani BouaddiPas encore d'évaluation
- Chadi RessaDocument70 pagesChadi RessaAbdelghani BouaddiPas encore d'évaluation
- MP Wirgane 13 14Document4 pagesMP Wirgane 13 14Abdelghani BouaddiPas encore d'évaluation
- ConvocationDocument1 pageConvocationAbdelghani BouaddiPas encore d'évaluation
- Liste Des AdmisDocument1 pageListe Des AdmisAbdelghani BouaddiPas encore d'évaluation
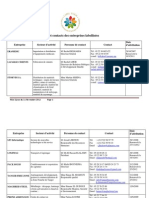
- Liste Des Entreprises LabelliseesDocument8 pagesListe Des Entreprises LabelliseesAbdelghani BouaddiPas encore d'évaluation
- Cours5 PDFDocument6 pagesCours5 PDFsamiraPas encore d'évaluation
- Chapitre 7Document32 pagesChapitre 7Karim Ahmed BetkomPas encore d'évaluation
- MALIARI YassineDocument1 pageMALIARI YassineFouad GhebriouPas encore d'évaluation
- Grammaire Latine - Verbes Réguliers PDFDocument9 pagesGrammaire Latine - Verbes Réguliers PDFJuliana BarbosaPas encore d'évaluation
- Mission O.P.C. Ordonnancement Pilotage CoordinationDocument4 pagesMission O.P.C. Ordonnancement Pilotage CoordinationMajda AmzirPas encore d'évaluation
- Fiche Revisions S2 1ere ESDocument2 pagesFiche Revisions S2 1ere ESBrowney BrowneyPas encore d'évaluation
- Études - Sur - Les - Fibres - Végétales - Textil Livre PDFDocument327 pagesÉtudes - Sur - Les - Fibres - Végétales - Textil Livre PDFSeniora AnnaPas encore d'évaluation
- 415 Fiche-FDLM415 P67Document4 pages415 Fiche-FDLM415 P67Florine MattePas encore d'évaluation
- Chapitre 2 Controle US Docs Etudiants Site PDFDocument20 pagesChapitre 2 Controle US Docs Etudiants Site PDFNedelcu VioPas encore d'évaluation
- Izabela Pozierak-Trybisz-Analyse Sémantique Des Prédicats de Communication - Production Et Interprétation Des Signes. Emplois de Communication Non VerbaleDocument258 pagesIzabela Pozierak-Trybisz-Analyse Sémantique Des Prédicats de Communication - Production Et Interprétation Des Signes. Emplois de Communication Non VerbaleGabrielle 76Pas encore d'évaluation
- TP1: Analyse de Certaines Caractéristiques de Construction D'un TissuDocument5 pagesTP1: Analyse de Certaines Caractéristiques de Construction D'un TissuSarra BelhadjPas encore d'évaluation
- Métré Fondation Partie 1Document4 pagesMétré Fondation Partie 1Abdou Aziz Kane100% (1)
- Serie Logique ArithmetiqueDocument4 pagesSerie Logique ArithmetiqueHajar BelPas encore d'évaluation
- NDC-Fondations - PREMONTDocument10 pagesNDC-Fondations - PREMONTMouad FASSI FIHRIPas encore d'évaluation
- Atma VidyaDocument4 pagesAtma VidyaMariano M.100% (1)
- Rapport de Stage 1èreDocument29 pagesRapport de Stage 1èreTezca GuevaraPas encore d'évaluation
- Ruger sr22Document58 pagesRuger sr22olivier.simeoniPas encore d'évaluation
- BlandineDocument3 pagesBlandinexavier nkungwaPas encore d'évaluation
- Bed 7 AdDocument4 pagesBed 7 Adshadow123Pas encore d'évaluation
- Sous-Thème 2 - Réseaux SociauxDocument47 pagesSous-Thème 2 - Réseaux SociauxMme et Mr LafonPas encore d'évaluation
- Guide Abrégé: Version 1.0, Mai 2013Document6 pagesGuide Abrégé: Version 1.0, Mai 2013Akli FaridPas encore d'évaluation
- FourierDocument8 pagesFourierhenryPas encore d'évaluation
- Diamniadio DIONGUESAKHO Colloque FrontUrb 2Document22 pagesDiamniadio DIONGUESAKHO Colloque FrontUrb 2fallPas encore d'évaluation
- Module 1 Lecon 1Document9 pagesModule 1 Lecon 1Romuald N'TAKPEPas encore d'évaluation
- Bridage RApIDE Pour MOULES D INJECTION PDFDocument24 pagesBridage RApIDE Pour MOULES D INJECTION PDFSamir KhPas encore d'évaluation
- Les Documents Les Plus Importants SmeDocument10 pagesLes Documents Les Plus Importants Smemathieu wilfrid gellis100% (1)
- Compo12as - Pour FusionDocument6 pagesCompo12as - Pour FusionChebah FaizaPas encore d'évaluation
- Lettre de RecommandationDocument1 pageLettre de RecommandationTheopatre MrPas encore d'évaluation
- Etude Comparative Des SystemesDocument18 pagesEtude Comparative Des Systemesmehdi hanafiPas encore d'évaluation
- Sécurité Des Données-Partie5Document23 pagesSécurité Des Données-Partie5NaSsimElMaataOuiPas encore d'évaluation