Vous aimerez peut-être aussi
- Tutoriel - Mise en Route Positionnement Par Tableau - 603cf62629f68Document31 pagesTutoriel - Mise en Route Positionnement Par Tableau - 603cf62629f68Denis RochePas encore d'évaluation
- Instructions PDF FRDocument131 pagesInstructions PDF FRAhmed IdrissiPas encore d'évaluation
- Sup 3Document13 pagesSup 3jgildominPas encore d'évaluation
- SWOOD 2018 InstallationDocument14 pagesSWOOD 2018 InstallationLinda FujilestariPas encore d'évaluation
- Tool 1 - Tutorial Launching and Using The Server FR V2 PDFDocument11 pagesTool 1 - Tutorial Launching and Using The Server FR V2 PDFTAPSOBA AugustePas encore d'évaluation
- Simo AxeDocument9 pagesSimo Axejabrane jabranePas encore d'évaluation
- Mise en Route Du PanelView-2Document34 pagesMise en Route Du PanelView-2manuelsipofo910Pas encore d'évaluation
- Mise en Oeuvre D'une Appli Unity PDFDocument62 pagesMise en Oeuvre D'une Appli Unity PDFYoussef Jake100% (1)
- DocSup1 PDFDocument14 pagesDocSup1 PDFمراد القدارPas encore d'évaluation
- TP Openerp PLMDocument12 pagesTP Openerp PLMabrachidPas encore d'évaluation
- MISE A JOUR VERSION YourCegid MANUFACTURING PMIDocument12 pagesMISE A JOUR VERSION YourCegid MANUFACTURING PMImohamedPas encore d'évaluation
- Rapport Eon PDFDocument24 pagesRapport Eon PDFhajer100% (1)
- TP Supervision Fianle - PagenumberDocument23 pagesTP Supervision Fianle - PagenumberAmmar GouasmiaPas encore d'évaluation
- Coswin Mobile Guide D'Installation: Serveur de SynchronisationDocument25 pagesCoswin Mobile Guide D'Installation: Serveur de SynchronisationfetniPas encore d'évaluation
- Gstiaportalv11pfrfr FR FRDocument312 pagesGstiaportalv11pfrfr FR FRHamadi Ben SassiPas encore d'évaluation
- SOMACHINE Liaison SoMachine Entre Un Contrôleur M241 ATV32 HMIST655Document10 pagesSOMACHINE Liaison SoMachine Entre Un Contrôleur M241 ATV32 HMIST655Thomas RIESPas encore d'évaluation
- IAS - Guide D'installationDocument13 pagesIAS - Guide D'installationrminotPas encore d'évaluation
- Paie SageDocument26 pagesPaie SageDjibrine AlkhaliPas encore d'évaluation
- SupervisionDocument36 pagesSupervisionheikelPas encore d'évaluation
- TwelDocument18 pagesTwelmouloud hadbiiPas encore d'évaluation
- 6dp MovidriveDocument52 pages6dp Movidrivebenzisraa90Pas encore d'évaluation
- Documentation Test Mobile Money WordpressDocument4 pagesDocumentation Test Mobile Money WordpressAzizPas encore d'évaluation
- SIMO12Document1 pageSIMO12jabrane jabranePas encore d'évaluation
- Sys89 E1 1Document70 pagesSys89 E1 1maintenance SA-TGRPas encore d'évaluation
- Rap Final VHDLDocument18 pagesRap Final VHDLKanouni OussamaPas encore d'évaluation
- Présentation StageDocument24 pagesPrésentation StageHamza AraibaPas encore d'évaluation
- SAiCloudResellerDocumentation FrenchDocument12 pagesSAiCloudResellerDocumentation Frenchtestepdf82Pas encore d'évaluation
- RapportDocument80 pagesRapportYoussef YJPas encore d'évaluation
- 04 - Langage PL7Document42 pages04 - Langage PL7Nacer SbrPas encore d'évaluation
- MagretV8 Installation MagretDocument26 pagesMagretV8 Installation Magretmaxximiliano71Pas encore d'évaluation
- Proteus Arduino Tut2Document6 pagesProteus Arduino Tut2Malike DJAFFOPas encore d'évaluation
- FR 2023 Manuel ACDocument50 pagesFR 2023 Manuel ACRami YoucefPas encore d'évaluation
- Windows 7 Les Secrets Des ProsDocument531 pagesWindows 7 Les Secrets Des Proskimov0% (2)
- RAPORT AAAAAAAAvvvvvvvvvvvvvvvDocument31 pagesRAPORT AAAAAAAAvvvvvvvvvvvvvvvsaif nacer4Pas encore d'évaluation
- 12-01-2024 - Portfolio-Intégrer-finalDocument37 pages12-01-2024 - Portfolio-Intégrer-finalHans ENGONGAPas encore d'évaluation
- Didacticiel PcvueDocument38 pagesDidacticiel PcvueJean-Pierre AwuPas encore d'évaluation
- PW Documentation-Installation ClientDocument21 pagesPW Documentation-Installation ClientMiguel MorenoPas encore d'évaluation
- Catia v5 KinematicsDocument253 pagesCatia v5 KinematicsMilan SimikićPas encore d'évaluation
- TP 1 - Installation de Odoo14Document13 pagesTP 1 - Installation de Odoo14vowisa nhPas encore d'évaluation
- Release NotesDocument24 pagesRelease Notesmuhamad.badar9285Pas encore d'évaluation
- Procédure de Maj V900 R1Document6 pagesProcédure de Maj V900 R1Pierre TRANPas encore d'évaluation
- Tutomovigear Sni Bmiseenservicev1.30 5ae9893f1c939Document31 pagesTutomovigear Sni Bmiseenservicev1.30 5ae9893f1c939lebonmacparisPas encore d'évaluation
- Comment Prendre Le Controle D'un PC Avec VNCDocument20 pagesComment Prendre Le Controle D'un PC Avec VNCmass murderer63100% (7)
- Manelle Sur Wincc FlexibleDocument78 pagesManelle Sur Wincc Flexibleمراد القدارPas encore d'évaluation
- Installer Un Serveur de Déploiement FOGDocument42 pagesInstaller Un Serveur de Déploiement FOGbouida100% (1)
- Doc4 Cours PLC Tome4Document10 pagesDoc4 Cours PLC Tome4MiloudPas encore d'évaluation
- TopSolid 7 - Composant Avec ProcédéDocument14 pagesTopSolid 7 - Composant Avec ProcédéguivalinuxPas encore d'évaluation
- Guide Installation 2011-01-12Document48 pagesGuide Installation 2011-01-12api-326789955Pas encore d'évaluation
- Expose de Java (Entrainement)Document16 pagesExpose de Java (Entrainement)CÖPA SODAZINDJI0% (1)
- 1 Billot Stephane Dossier ZabbixDocument68 pages1 Billot Stephane Dossier Zabbixmariko samiPas encore d'évaluation
- Notice Icarsoft v2.0Document17 pagesNotice Icarsoft v2.0Dede 83Pas encore d'évaluation
- FR - Security Center Administrator Guide 5.2Document958 pagesFR - Security Center Administrator Guide 5.2RebornteamAbdelkaderSariPas encore d'évaluation
- 654 PDFDocument42 pages654 PDFAchraf El aouamePas encore d'évaluation
- MaxiECU NoticeDocument16 pagesMaxiECU NoticejossePas encore d'évaluation
- Spring Boot par la pratique: Développer les services Rest avec Spring-Boot et Spring-RestTemplateD'EverandSpring Boot par la pratique: Développer les services Rest avec Spring-Boot et Spring-RestTemplatePas encore d'évaluation
- Suite logicielle: Révolutionner la vision par ordinateur avec la suite logicielle ultimeD'EverandSuite logicielle: Révolutionner la vision par ordinateur avec la suite logicielle ultimePas encore d'évaluation
- FreeCAD | Projets de conception CAO: Construire des modèles CAO avancés étape par étapeD'EverandFreeCAD | Projets de conception CAO: Construire des modèles CAO avancés étape par étapePas encore d'évaluation
- Mieux maîtriser PowerPoint: Un outil de familiarisation au logiciel de présentation PowerPointD'EverandMieux maîtriser PowerPoint: Un outil de familiarisation au logiciel de présentation PowerPointPas encore d'évaluation
- Malaxage Beton LCPC Oa41Document211 pagesMalaxage Beton LCPC Oa41dino cedricPas encore d'évaluation
- 1 ToIP M FAYE AFIDocument14 pages1 ToIP M FAYE AFIOumoul BacharPas encore d'évaluation
- Guide Utilisateur Prestashop 1.7Document312 pagesGuide Utilisateur Prestashop 1.7wxcvPas encore d'évaluation
- RARH-Series Lightweight Hollow Plunger Cylinders FRDocument2 pagesRARH-Series Lightweight Hollow Plunger Cylinders FRjjh38Pas encore d'évaluation
- Ia l3 2019 CC SolutionsDocument3 pagesIa l3 2019 CC SolutionsAbdallahi SidiPas encore d'évaluation
- Manuel GigamediaDocument5 pagesManuel GigamediaLaurent OlivierPas encore d'évaluation
- TTS - Conditions Générales v1.4Document6 pagesTTS - Conditions Générales v1.4lvinchonPas encore d'évaluation
- Gassama DiahumbaDocument37 pagesGassama Diahumbaapi-676179720Pas encore d'évaluation
- Protocols PDFDocument25 pagesProtocols PDFnya ngassaPas encore d'évaluation
- Cours M2 ISTR v2Document34 pagesCours M2 ISTR v2Yasmine EL QOTNIPas encore d'évaluation
- FR 201606Document84 pagesFR 201606Guy DechampsPas encore d'évaluation
- DEP Mécanique Dengin de Chantier Eleve ÉtrangerDocument3 pagesDEP Mécanique Dengin de Chantier Eleve ÉtrangerMch HamidiPas encore d'évaluation
- L'Essentiel Automatismes Et Contrôle (PDFDrive)Document290 pagesL'Essentiel Automatismes Et Contrôle (PDFDrive)RénélicPas encore d'évaluation
- CE - 290123 - Tom Cruise Télé 7 Jours PDFDocument3 pagesCE - 290123 - Tom Cruise Télé 7 Jours PDFjoaquin morato tomasPas encore d'évaluation
- La Communication - Fin Semestre1Document4 pagesLa Communication - Fin Semestre1Mohamed SaidiPas encore d'évaluation
- Contrat Entre Modele Et PhotographeDocument1 pageContrat Entre Modele Et PhotographeKilianPas encore d'évaluation
- td7 1Document7 pagestd7 1saidPas encore d'évaluation
- IDsl 0310 FR FR-FRDocument476 pagesIDsl 0310 FR FR-FRBa MamadouPas encore d'évaluation
- Vade-Mecum de Kinésithérapie Et de Rééducation Fonctionnelle Télécharger, Lire PDFDocument6 pagesVade-Mecum de Kinésithérapie Et de Rééducation Fonctionnelle Télécharger, Lire PDFAchraf RabadiPas encore d'évaluation
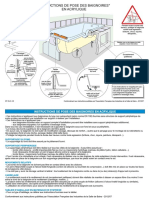
- Instructions de Pose Des Baignoires en AcryliqueDocument2 pagesInstructions de Pose Des Baignoires en Acryliquecloud adsophPas encore d'évaluation
- CSE Instructor Materials Chapter3Document28 pagesCSE Instructor Materials Chapter3Linux HamzaPas encore d'évaluation
- Dossier de Cours Technologies WebDocument31 pagesDossier de Cours Technologies WebWilfrid GomadjePas encore d'évaluation
- Exercices Algebre Relationnelle+SQL-V2Document2 pagesExercices Algebre Relationnelle+SQL-V2Yassin HawariPas encore d'évaluation
- Netiquette PédagogiqueDocument2 pagesNetiquette PédagogiqueFrédéric GagnonPas encore d'évaluation
- TP CCF 3h Programmation Centrale ELA 3000 2010-01Document4 pagesTP CCF 3h Programmation Centrale ELA 3000 2010-01Alain GeoffroyPas encore d'évaluation
- TD1-2020 CompressedDocument1 pageTD1-2020 CompressedBrice KouamPas encore d'évaluation
- Chapitre 2 Les Installations Eclairage Domestique PDFDocument25 pagesChapitre 2 Les Installations Eclairage Domestique PDFChristian0% (1)
- Num 2Document2 pagesNum 2Cherry BmPas encore d'évaluation
- Schema Des EtudesDocument1 pageSchema Des EtudesLechelonPas encore d'évaluation
- Check-List Hse BouiraDocument8 pagesCheck-List Hse BouiraManseur AmarPas encore d'évaluation