Vous aimerez peut-être aussi
- Business PlanDocument22 pagesBusiness Plansevemasse70% (10)
- Note de Calcul VRDDocument8 pagesNote de Calcul VRDMohamed ChrifPas encore d'évaluation
- Procédure Gestion de ProjetsDocument4 pagesProcédure Gestion de ProjetsAmedamine100% (2)
- Plan Programme MODULE 05 Systeme D'exploitation Client WindowsDocument11 pagesPlan Programme MODULE 05 Systeme D'exploitation Client WindowsKnowlegde2016100% (1)
- Ecommerce 22Document23 pagesEcommerce 22marhfor0% (1)
- 9º Ano Teste 1Document6 pages9º Ano Teste 1Natercia HenriquesPas encore d'évaluation
- Note de Calcul VRDDocument8 pagesNote de Calcul VRDAbdel Hakim M. NadjibPas encore d'évaluation
- Exercices Rhéo 2014 2015Document6 pagesExercices Rhéo 2014 2015Malak Yahyah100% (3)
- Management Et Contrôle de Gestion: ManuelDocument33 pagesManagement Et Contrôle de Gestion: Manuelmohamed bangoura100% (1)
- Automatique II 07 PDFDocument4 pagesAutomatique II 07 PDFmiraPas encore d'évaluation
- En 12516 1 2005 Ac 2007Document3 pagesEn 12516 1 2005 Ac 2007Kishor JadhavPas encore d'évaluation
- Processus Etude Et DocumentationDocument3 pagesProcessus Etude Et DocumentationchahiPas encore d'évaluation
- Exercices Aep FinalDocument9 pagesExercices Aep FinalYE Yavé JuniorPas encore d'évaluation
- FELIPE CAZARINI OHQUI 12.219.096-0 Exercicio 1Document6 pagesFELIPE CAZARINI OHQUI 12.219.096-0 Exercicio 1Felipe OhquiPas encore d'évaluation
- TP N°1 Caractérisation D'une Cellule Solaire: A-Etude de La Tension À Vide en Fonction de L'excitationDocument19 pagesTP N°1 Caractérisation D'une Cellule Solaire: A-Etude de La Tension À Vide en Fonction de L'excitationhamdi jihenPas encore d'évaluation
- TP Thermo DiagrammeDocument5 pagesTP Thermo DiagrammeAyoub DAANOUNPas encore d'évaluation
- Note de Calcul VRD en Génie Civil PDFDocument9 pagesNote de Calcul VRD en Génie Civil PDFWalid MghazliPas encore d'évaluation
- Exercice SDocument8 pagesExercice SYE Yavé JuniorPas encore d'évaluation
- TP TPMDocument9 pagesTP TPMDalia BordjiPas encore d'évaluation
- Données ExpérimentalesDocument2 pagesDonnées ExpérimentalesAymenPas encore d'évaluation
- 354498532-Not E-De-Cal Cul-V RD - Wat ErmarkDocument8 pages354498532-Not E-De-Cal Cul-V RD - Wat ErmarkIbrahima Laye BarrePas encore d'évaluation
- 2017 A (AU4G) : CorrespondancesDocument2 pages2017 A (AU4G) : CorrespondancesLio BaptistaoPas encore d'évaluation
- Eficiencia EstandarDocument1 pageEficiencia Estandaralex.burgosPas encore d'évaluation
- Ge PrintDocument20 pagesGe PrintAwad Mahardika IshaqPas encore d'évaluation
- Méthode Des Débits FinaleDocument5 pagesMéthode Des Débits FinaleEDEA AchillePas encore d'évaluation
- CR Re Master 1 UsthbDocument4 pagesCR Re Master 1 UsthbFlenneo WOCPas encore d'évaluation
- TD 2 CorrectDocument8 pagesTD 2 CorrectBourhariane SanaePas encore d'évaluation
- Correction Série 5 HydrologieDocument3 pagesCorrection Série 5 Hydrologiesami nasrPas encore d'évaluation
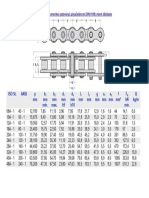
- Az Egysoros Amerikai Szabványú GörgősláncokDocument1 pageAz Egysoros Amerikai Szabványú GörgősláncokRácz AttilaPas encore d'évaluation
- Información Técnica SoldaduraDocument5 pagesInformación Técnica SoldaduraMauricio KookcPas encore d'évaluation
- Bang So LieuDocument17 pagesBang So LieuVũ Nhật HuyPas encore d'évaluation
- CalculationDocument4 pagesCalculationMProd AmmoPas encore d'évaluation
- Eficiencia AltaDocument1 pageEficiencia Altaalex.burgosPas encore d'évaluation
- Statiques Et Dynamique Des Fluides Part 5'Document18 pagesStatiques Et Dynamique Des Fluides Part 5'agbokannou spéroPas encore d'évaluation
- Mecanica-Ultima Clase EjericcioDocument4 pagesMecanica-Ultima Clase EjericcioArtudosky el ProPas encore d'évaluation
- 1111Document4 pages1111Benaissa DjaberPas encore d'évaluation
- Weg W22 3000 RPM Ie1Document1 pageWeg W22 3000 RPM Ie1Ivan Abbá100% (1)
- Proj MedROE V UHFDocument6 pagesProj MedROE V UHFElmo Dutra FilhoPas encore d'évaluation
- Compte Rendu Cinetique Ch4 Ismail Et InesDocument5 pagesCompte Rendu Cinetique Ch4 Ismail Et InesIsmail ZitouniPas encore d'évaluation
- StatistiqueDocument11 pagesStatistiqueNour DriaPas encore d'évaluation
- Tuberia ISODocument1 pageTuberia ISOJorge FerrerPas encore d'évaluation
- Calcul Des RIA SKIKDA Et Des SprinklersDocument8 pagesCalcul Des RIA SKIKDA Et Des SprinklersMohamed Ilias HamaniPas encore d'évaluation
- Les AnnexesDocument51 pagesLes Annexesabdo jbadPas encore d'évaluation
- Moteur Electrique Triphase Alu Doc 00Document6 pagesMoteur Electrique Triphase Alu Doc 00ferhat amazighPas encore d'évaluation
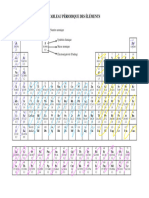
- Tableau PériodiqueDocument1 pageTableau Périodiqueclarabelisle11Pas encore d'évaluation
- TP nخ 1 - Cin+matique du mouvement rectiligne -Document4 pagesTP nخ 1 - Cin+matique du mouvement rectiligne -Abderrahmane0% (1)
- Terma 2Document9 pagesTerma 2Kaouachi Ahmed LouayPas encore d'évaluation
- Pompe CentrifugeDocument4 pagesPompe Centrifugeiheb.benlakhelPas encore d'évaluation
- Planilla AALL WVCDocument1 pagePlanilla AALL WVCAlfredo Freire GonzalezPas encore d'évaluation
- Examen ReneDocument15 pagesExamen ReneJuan Manuel Corrales RamosPas encore d'évaluation
- Eficiencia PremiumDocument1 pageEficiencia Premiumalex.burgosPas encore d'évaluation
- Datos Rendimiento Genia Hybrid 12Document1 pageDatos Rendimiento Genia Hybrid 12Gasindur ValladolidPas encore d'évaluation
- COURS AEP 3EAnnée28 - 31Document4 pagesCOURS AEP 3EAnnée28 - 31Simons Architecte DezyPas encore d'évaluation
- tp8 RapportDocument7 pagestp8 RapportUgo TiraboschiPas encore d'évaluation
- Dados Hidrol.Document1 pageDados Hidrol.J MaxFilhoPas encore d'évaluation
- Trame Temps de PoseDocument3 pagesTrame Temps de PosePatrick CompanPas encore d'évaluation
- À ImprimerDocument3 pagesÀ ImprimerChrist AbomoPas encore d'évaluation
- Compte RendusDocument7 pagesCompte RendusSabrine GharianiPas encore d'évaluation
- Resultados de AnalisadosDocument1 pageResultados de Analisadosdanilo.silva15196Pas encore d'évaluation
- Planilha de ResultadosDocument1 pagePlanilha de Resultadosdanilo.silva15196Pas encore d'évaluation
- FT 1802Document5 pagesFT 1802CLR MAPPas encore d'évaluation
- Flow Monitoring ChillerDocument3 pagesFlow Monitoring ChillerMuhammad Bacharudin Yusuf APas encore d'évaluation
- TP Pompe CentrifugeDocument6 pagesTP Pompe CentrifugeWafa Saidani100% (1)
- CNTQ TP CRGDocument20 pagesCNTQ TP CRGfatimazahragramziPas encore d'évaluation
- TDDocument18 pagesTDACHRAF ABBOUDPas encore d'évaluation
- Grafik RLDocument4 pagesGrafik RLFiqih J.FPas encore d'évaluation
- Le syndrome périodique associé à la cryopyrine (CAPS)D'EverandLe syndrome périodique associé à la cryopyrine (CAPS)Pas encore d'évaluation
- TD 6Document2 pagesTD 6Lotfi GanaPas encore d'évaluation
- ETR 0 Novembre 2022 LPB Dossier La Verite Sur FTX SDDocument36 pagesETR 0 Novembre 2022 LPB Dossier La Verite Sur FTX SDCaca ProutPas encore d'évaluation
- La Norme Française de l'iSO 9001Document64 pagesLa Norme Française de l'iSO 9001OussamaPas encore d'évaluation
- Mentions LegalesDocument3 pagesMentions LegalesHASSAN HAKAMPas encore d'évaluation
- Parefeu LinuxDocument5 pagesParefeu Linuxapi-312739131Pas encore d'évaluation
- Manuel - Radio ROLANDDocument302 pagesManuel - Radio ROLANDDidier FlachardPas encore d'évaluation
- Inno 017 0139Document18 pagesInno 017 0139Amine AllaliPas encore d'évaluation
- Exercices Modulation FMDocument3 pagesExercices Modulation FMHouda fleur100% (1)
- Grille Des Besoins Fonctionnels Et TechniquesDocument43 pagesGrille Des Besoins Fonctionnels Et TechniquesNadir DRISSIPas encore d'évaluation
- Ms - Tel.Belarbi +belmedani PDFDocument88 pagesMs - Tel.Belarbi +belmedani PDFEmy PinkPas encore d'évaluation
- Concept TURN 55 TOUR DIDACTIQUE A COMMANDE NUMÉRIQUEDocument6 pagesConcept TURN 55 TOUR DIDACTIQUE A COMMANDE NUMÉRIQUEMez NacerPas encore d'évaluation
- Projet Trafic Et QoS Banda Gilles OlivierDocument15 pagesProjet Trafic Et QoS Banda Gilles OlivierLevite Armel N 'guessanPas encore d'évaluation
- Eigrp Ipv6 00Document5 pagesEigrp Ipv6 00JuniorPas encore d'évaluation
- Lettre Resiliation Bail 1 MoisDocument2 pagesLettre Resiliation Bail 1 MoisMaxime RateletPas encore d'évaluation
- Serie1 TD SIC 2023 2024Document10 pagesSerie1 TD SIC 2023 2024mohamed.moualim60Pas encore d'évaluation
- Techno WebDocument3 pagesTechno WebLu NàPas encore d'évaluation
- Alim 723 V2.2Document3 pagesAlim 723 V2.2Abdou KarimPas encore d'évaluation
- Check List Dsi Guide WWFDocument3 pagesCheck List Dsi Guide WWFndiayePas encore d'évaluation
- Plaquette El ElyonDocument2 pagesPlaquette El ElyonCoachDistingué BlegPas encore d'évaluation
- Support 256Document263 pagesSupport 256Jose Luis Caceres Severino50% (2)
- EX1Document1 pageEX1Koki OuPas encore d'évaluation
- 3 Systéme D'information 5Document90 pages3 Systéme D'information 5mehdiPas encore d'évaluation