Académique Documents
Professionnel Documents
Culture Documents
Universite Sidi Mohamed Ben Abdellah Eco
Transféré par
Yahiyaoui SofyaneCopyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Universite Sidi Mohamed Ben Abdellah Eco
Transféré par
Yahiyaoui SofyaneDroits d'auteur :
Formats disponibles
Université Sidi Mohamed Ben Abdellah
Ecole Supérieure
De Technologie
Fès
Département : maintenance industrielle
Réalisé par : Encadré par :
Abdelali BARTALI Mr: Ahmed DERRAZ
DRISS CHANOUFI
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
Dé dic a c e :
Nous dédions ce modeste rapport à ceux
qui nous ont été le bon exemple et à qui nous
sommes redevables :
- Nos chers parents, pour qui aucune
dédicace n’exprimera la profondeur de
notre amour et notre reconnaissance pour
leurs sacrifices et leurs patiences.
- Nos enseignants.
- Nos amis et collègues.
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
Noussaisissonscetteoccasion pour présenter nossincères
remerciementsàmonsieur SAFOUANE Directeur del’école
SupérieuredeTechnologiedeFèset àmonsieur Abdennebi TALBI
notrechef dedépartement.
A l’issuedenotreprojet defin d’étudesnoustenonsà
présenter nosremerciementslespluschaleureux et notregratitudeà
notreencadrant monsieur AhmedDERRAZ àqui aucun
remerciement nesuffirapour sesconseilset son aideafin d’assurer
lebon déroulement denotreprojet.
Nosvifsremerciementsaussi autresenseignantsqui ont
permislaréalisation decet ouvrageet tout particulièrement
Mr.RAMADANY et Mr.AMRANI sansoublier lepréparateur
pour saserviabilité
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
Introduction,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,6
1. LES DIFFERENTES POLITIQUES DE MAITENANCE
1. LA MAINTENANCE : GENERALITES,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,7
1.1 DEFINITION GENERALE,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,7
1.2 PRINCIPES DE LA MAINTENANCE CONDITIONNELLE,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,8
1.3 PRATIQUE DE LA MAINTENANCE CONDITIONNELLE ,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,8
1.3.1 Défauts potentiels,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,9
1.3.2 Méthodes de détection des défauts,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,9
2. LES ETUDES DES VIBRATIONS,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,10
2.1 NAISSANCE D’UNE VIBRATION,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,11
2.2 LES DIFFERENTES FORMES DE VIBRATIONS,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,11
2.3 LES MODES DE DETECTION,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,14
3.1. Valeur efficace Xeff,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,16
3.2. Valeur crête Xc,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,16
3.3. Valeur crête à crête Xcc,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,16
2.4 LES GRANDEURS DE MESURE,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,17
4.1. Déplacement vibratoire s(t),,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,18
4.2. Vitesse vibratoire v(t),,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,18
4.3. Accélération vibratoire a(t),,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,18
4.4. Relations entre A, V et S ,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,19
4.5. Décibel,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,20
4.6 La mesure de A, V et S dans la pratique,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,21
3. REPRESENTATION DU SIGNAL,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,21
3.1 REPRESENTATION EN FONCTION DU TEMPS ,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,21
3.2 REPRESENTATION SPECTRALE,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,21
2.1 Cas d’une vibration harmonique,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,22
2.2 Cas d’une vibration périodique, mais non harmonique,,,,,,,,,,,,,,,,,,,22
2.2.1 Déplacement vibratoire,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,23
2.2.2 Vitesse vibratoire.,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,23
2.2.3 Accélération vibratoire,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,24
4. STRATEGIE DE SURVEILLANCE : DEPISTAGE ET DIAGNOSTIC,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,24
4.1 DEPISTAGE,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,25
4.1.1 Notions de seuil et d'indicateur,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,25
4.1.2 Suivi des indicateurs en mode global « large bande »,,,,,,,,,,,,,,,,,,,,,25
4.1.3 Suivi des indicateurs en mode global par bandes de fréquences,25
4.1.4 Suivi de !a forme spectrale ,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,26
4.1.5 Suivi des indicateurs spécifiques aux roulements,,,,,,,,,,,,,,,,,,,,,,,,,,,,27
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
5.1 Facteur de crête,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,27
5.2 Kurtosis,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,27
4.2 DIAGNOSTIC ,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,28
2.1 Définition,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,28
2.2 Outils de diagnostic,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,28
2.2.1 Spectre,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,28
2.2.2 Zoom,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,29
2.2.3 Cepstre,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,30
2.2.4 Démodulation d'amplitude (détection d'enveloppe),,,,,,,,,30
5. DETECTION PAR L'ANALYSE SPECTRALE DES PRINCIPALES ANOMALIES,,,,,,30
5.1. Phénomènes provoquant des pics ,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,30
5.2. Phénomènes créant des pics à des fréquences ,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,32
5.3. Phénomènes créant des modifications,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,32
6. LE MATERIEL (CHAINE DE MESURE),,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,32
6.1. Les capteurs,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,33
6.2. Les enregistreurs,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,, ,,33
6.3. Les analyseurs,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,33
TRAVAUX EFFECTEES,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,, 34
1ère étape : visite préliminaire,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,35
2ème étape : préparation de l’analyse,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,, 38
3ème étape : relevé de mesure/analyse,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,40
Conclusion générale,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,48
Annexe,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,49
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
Introduction
Toutes les machines en fonctionnement produisent des
vibrations. Images des efforts dynamiques engendrés
par les pièces en mouvement, ces vibrations occupent
une place privilégiée parmi les paramètres à prendre en
considération pour effectuer un diagnostic.
Ces caractéristiques font de la surveillance par analyse
des vibrations, un outil indispensable pour une
maintenance moderne, puisqu’elle permet, par un
dépistage ou un diagnostic, d’éviter la casse et de
n’intervenir sur une machine que pendant des arrêts
programmés de production.
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
LES DIFFERENTES POLITIQUES DE MAITENANCE
1. LA MAINTENANCE : GENERALITES
1.1 DEFINITION GENERALE
La maintenance est définie comme étant l’ensemble des actions permettant de
maintenir ou de rétablir un bien dans un état spécifié ou en mesure d’assurer un service
déterminé.
Maintenir c’est donc effectuer des opérations qui permettent de conserver le potentiel
du matériel pour assurer la continuité et la qualité de la production.
Il existe 3 types principaux de maintenance
• La maintenance corrective
• La maintenance systématique
• La maintenance conditionnelle
Ils peuvent être schématisés par le synoptique suivant :
· La maintenance est corrective :
Si l'action (dépannage, changement, réglage) est située après la défaillance de la
machine.
· La maintenance est préventive systématique :
Si l'action est effectuée suivant un calendrier pré-déterminé (exemple : toutes les 500
heures : Graissage ;
toutes les 10 000 heures : Changement de roulements).
· La maintenance est préventive conditionnelle :
Si l'action est effectuée dès qu'une alarme ou un indicateur d'usure dépasse un seuil
pré-déterminé.
1.2 PRINCIPES DE LA MAINTENANCE CONDITIONNELLE
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
La maintenance conditionnelle a pour buts :
• La détection des défauts
• Le suivi de ces défauts (tendances)
• L’utilisation de la machine jusqu'à l’arrêt avant rupture.
Il convient pour cela de définir un ou plusieurs indicateurs d’état de la machine qui
pourront être suivis selon la figure 1.
Figure 1 : comportement d’un indicateur d’état
Pour un suivi correct, les équipements industriels doivent être jugés à l'aide
d’indicateurs présentant deux qualités essentielles :
• Simplicité de la prise de mesure
• Signification importante de leur contenu
L'ambition de ces indicateurs est uniquement de constater que l'équipement est ou non
en bon état de marche, et non de fournir un diagnostic complet.
Ces indicateurs peuvent être dits de performance (consommation, débit, qualité et/ou
quantité du produit fini, etc.) ou de comportement (état vibratoire, chocs des roulements,
bruit, température, etc.).
1.3 PRATIQUE DE LA MAINTENANCE CONDITIONNELLE
un démontage, un remplacement coûtent cher en temps et en perte de production. La
pratique de la maintenance conditionnelle consiste à ne changer l’élément que lorsque
celui-ci présente des signes de vieillissement ou d’usure mettant en cause, à brève
échéance, ses performances. la maintenance conditionnelle comporte trois phases :
• La détection du défaut qui se développe ;
• L’établissement d’un diagnostic ;
• L’analyse de la tendance.
1.3.1 Défauts potentiels
Le tableau ci-dessous indique les défauts qui apparaissent le plus souvent sur les
machines industrielles, ainsi que les indicateurs essentiellement vibratoires qui leurs
sont associés.
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
1.3.2 Méthodes de détection des défauts
Outre la mesure des vibrations, l’ingénieur de maintenance dispose d’autres outils qui
lui permettront d’effectuer un diagnostic sûr :
Paramètres utilisés pour la maintenance conditionnelle :
· Température.
· Pression.
· Débit.
· Courant.
· Tension.
· Analyse des huiles et des gaz.
· Thermographie.
· Vibrations, etc.
Le choix des paramètres dépend surtout de la machine à surveiller. Par exemple,
l'analyse d'huile donne de bons résultats pour les moteurs thermiques.
Les mesures de vibrations se sont imposées pour les machines tournantes car elles
donnent les informations les plus précoces et les plus précises.
Pour certains équipements, ces mesures de vibrations peuvent être complétées par des
informations de pression ou de température.
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
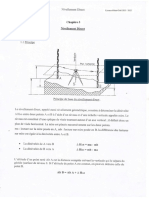
2. LES ETUDES DES VIBRATIONS
Qu'est-ce qu'une vibration ?
Un corps est dit en vibration lorsqu'il est animé d'un mouvement oscillatoire autour d'une
position de référence. Le nombre de cycles complets du mouvement dans une période
de temps d'une seconde est appelé fréquence et est mesuré en hertz (Hz).
Le mouvement peut consister en une composante unique se produisant à une
fréquence unique, comme avec un diapason,ou bien il peut consister en plusieurs
composantes se produisant à des fréquences différentes, simultanément, comme par
exemple dans le mouvement d'un piston d'un moteur à combustion interne.
En pratique, les signaux vibratoires sont composés d'une grande quantité de
fréquences apparaissant simultanément au point que l'on ne puisse juger
immédiatement au vu de la caractéristique amplitude temps du nombre de composantes
simultanées et à quelle fréquence elles se produisent.
Ces composantes peuvent être mises en évidence par le tracé de la caractéristique des
vibrations amplitude fréquence.
La division des signaux de vibration en composantes de fréquence individuelles est
appelée analyse de fréquence, une technique qui peut être considérée comme la pierre
angulaire du diagnostic de mesures des vibrations.
Le tracé montrant le niveau de vibration en fonction de la fréquence est appelé
spectrogramme de fréquence.
Dans l'analyse de fréquence des vibrations d'une machine on trouve ordinairement un
certain nombre de composantes de fréquence périodiques prédominantes
correspondant directement aux mouvements fondamentaux des différentes parties de la
machine. A l'aide de l'analyse de fréquence, on est par conséquent capable de dépister
la source des vibrations indésirables.
Figure 2 : les signaux vibratoires
10
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
2.1 NAISSANCE D’UNE VIBRATION
Dans l’exemple de la figure 1, une vibration est créée lorsque l'on déplace la masse (la
boule) de sa position d'équilibre à une position maximale ou minimale. Si l'on considère
que le mouvement n'est pas amorti, la boule vibrera indéfiniment entre ses deux
positions maximale et minimale.
Equipons maintenant cette boule d'un système de marquage et faisons défiler à vitesse
constante une bande de papier dans une direction perpendiculaire au mouvement.
Nous enregistrons ainsi le diagramme amplitude-temps (figure 3).
Figure 3 : enregistrement du diagramme amplitude-temps
2.2 LES DIFFERENTES FORMES DE VIBRATIONS
Les vibrations mécaniques sont des mouvements oscillant autour d’une position
moyenne d’équilibre. Ces mouvements oscillants, caractéristiques de l’effort qui les
génères, peuvent être, soit périodiques, soit apériodiques (transitoires ou
aléatoires)
Selon qu’ils se répètent ou non, identiquement à eux-mêmes après une durée
déterminée.
• Les vibrations périodiques peuvent correspondre à un mouvement sinusoÏdal
pur comme celui d’un diapason ou, plus généralement, à un mouvement
complexe périodique que l’on peut décomposer en une somme de mouvements
sinusoïdaux élémentaires, plus faciles à analyser.
§ Vibrations harmoniques (sinusoÏdal pur)
Une vibration harmonique est une vibration dont le diagramme amplitude-temps est
représenté par une sinusoïde
(Figure 4).
Le meilleur exemple d'une vibration harmonique est celle qui est générée par le balourd
d'un rotor en mouvement.
11
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
Figure 4 : vibration harmonique
Elle est décrite par l’équation 1 :
Avec :
ù = vitesse angulaire ou pulsation du mouvement (2ð f)
f = fréquence du mouvement
ϕ = phase du mouvement par rapport à un repère dans le temps
§ mouvement complexe périodique
Une vibration périodique est telle qu'elle se reproduit exactement après un certain
temps appelé période (figure 5).
Une telle vibration est créée par une excitation elle-même périodique. C'est le cas le
plus fréquent rencontré sur les machines.
Figure 5 : vibration périodique
12
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
Elle est décrite par l’équation 2 :
• Vibrations apériodiques
§ Les vibrations aléatoires
Une vibration aléatoire est telle que son comportement temporel est quelconque, c’est-
à-dire que l'on n'observe jamais de reproductibilité dans le temps (figure 6). C'est le cas
des chocs que l'on enregistre sur un broyeur.
figure6 : vibration apériodique
Elle est décrite par l’équation 3:
§ Les vibrations transitoires
Sont générées par des forces discontinues (choc).elles peuvent présenter ou non
un aspect oscillatoire revenant à une position d’équilibre après amortissement.
Lorsqu’il existe des oscillations, comme pour une structure qui vibre après un
choc et pour laquelle le coefficient d’amortissement est faible, on dit qu’il y a
amortissement sub-critique, et le mouvement est pseudo-périodique, si
l’amortissement est très important, la structure revient à sa position d’équilibre
sans oscillation, on dit alors que l’amortissement est sur-critique et le mouvement
est apériodique.
13
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
Figure 7 : vibration transitoire
2.3 LES MODES DE DETECTION
Ce chapitre fait appel à un vocabulaire qu'il convient de définir au préalable (figure 8).
figure 8 : grandeurs remarquables
VARIABLE : x (t) : C'est la valeur instantanée de la grandeur considérée.
MODULE : X : C'est la plus grande valeur que la variable x (t) puisse prendre.
PERIODE : T : C'est l'intervalle de temps au bout duquel la variable x (t) reprend la
même valeur dans la même direction (unité : seconde [s]).
FREQUENCE : f : C'est le nombre de périodes par unité de temps. La fréquence est
l'inverse de la Période.
14
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
Les unités usuelles de mesure de la fréquence sont :
• Le hertz [Hz], égal à 1 cycle par seconde
• Le cycle par minute [cpm]
PULSATION : ù : Encore appelée vitesse angulaire, sa formule est :
(Unité : radian/seconde [rad/s])
PHASE : ϕ : La phase est représentative du temps qui s’écoule entre une référence
que l'on se donne et l'instant que l'on considère. Elle est exprimée en unités d'angle,
sachant que : à t = 0 ϕ = 0 rad
à t = T ϕ = 2ð rad (ou 360°)
La notion de phase n'a de signification que pour une vibration harmonique.
LES MODES DE DETECTION
En mesure vibratoire, on utilise couramment trois modes de détection (figure 8) :
• Valeur efficace
• Valeur crête
• Valeur crête à crête
figure 8 : modes de détection usuels
3.1. Valeur efficace Xeff
Pour une vibration périodique, la valeur efficace est la moyenne quadratique des
valeurs efficaces de chacune des vibrations harmoniques la constituant :
15
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
Dans la littérature, Xeff peut également être notée Xrms (rms = root mean square).
3.2. Valeur crête Xc
La valeur crête d'une vibration est la valeur maximale prise par la variable x(t) dans l'un
des sens positif ou négatif.
Dans la littérature, Xc peut également être notée Xp (peak) ou Xs (Spitze).
3.3. Valeur crête à crête Xcc
La valeur crête à crête d'une vibration est la somme des deux valeurs crêtes pour les
sens positif et négatif.
Dans la littérature, Xcc peut également être notée Xpp (peak to peak) ou Xss (Spitze-
Spitze).
Utilisation des différents modes de détection
• On choisira de faire une mesure efficace lorsque l'on cherchera à apprécier l’énergie
mise en jeu dans la machine (effet de la moyenne quadratique).
• On choisira de faire des mesures crête ou crête à crête lorsque l'on cherchera à
apprécier les contraintes maximales subies par la machine (effet des valeurs
maximales).
Valeurs crête ou crête à crête vraie et calculée
Les valeurs crête ou crête à crête définies ci-dessus sont des valeurs vraies car elles
sont effectivement l'image des contraintes subies par la machine.
Certains appareils de mesure délivrent des valeurs crête ou crête à crête qui sont
calculées à partir de la valeur efficace par les relations suivantes :
Ces mesures sont rigoureusement exactes lorsque l'on a à faire à une vibration
harmonique.
16
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
Elles sont absolument fausses dès que l'on a affaire à un mélange d'au moins deux
vibrations, car il faut tenir compte de la phase de chacune des vibrations (figure 9).
Exemple : Composition de deux vibrations harmoniques de modules X1 et X2, et de
fréquences différentes f1 et f2.
Figure 9 : Composition de deux vibrations harmoniques
2.4. LES GRANDEURS DE MESURE
Une vibration mécanique peut être mesurée selon les trois grandeurs suivantes :
• Déplacement
• Vitesse
• Accélération
4.1. Déplacement vibratoire s(t)
Le déplacement s(t) d'une vibration harmonique est décrit par l'équation 9 :
Les unités couramment utilisées sont le micromètre [µm] et le millième d'inch [mil], avec
1 mil = 25,4 µm.
4.2. Vitesse vibratoire v(t)
Il se trouve que le déplacement est généralement un mauvais indicateur de la « nocivité
» de la vibration. On sait en effet qu’un déplacement donné représente un risque moins
grand à basse fréquence, qu’à haute fréquence.
La vitesse v(t) de cette vibration s'obtient par dérivation de l'équation 9 :
17
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
Equation 10
4.3. Accélération vibratoire a(t)
Pour différentes raisons liées soit à l’application (analyse modale par exemple), soit au
capteur, on préfère souvent mesurer un troisième paramètre, l’accélération. Cette
dernière est la dérivée de la vitesse ou encore la dérivée seconde du déplacement par
rapport au temps.
L’accélération a(t) de la vibration s'obtient par dérivation de l'équation 10 :
Les unités couramment utilisées sont le mètre par seconde au carré [m/s2] ou le [g], g
étant l’unité d’accélération de la pesanteur. En mesure de vibrations, la valeur retenue
est : 1g = 9,807 m/s².
18
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
4.4. Relations entre A, V et S
IMPORTANT :
Notera que les relations ci-après ne sont valables que pour des vibrations purement
harmoniques (à un seul ù ).
Il ressort de l’équation 9, de l’équation 10 et de l’équation 11 les relations suivantes
entre les modules et entre les phases :
Modules
Equation 12
L’équation 12 montre que l'on choisira préférentiellement :
• La grandeur déplacement pour détecter des phénomènes à basse fréquence (ù = 2ð f
petit)
• La grandeur accélération pour détecter des phénomènes à haute fréquence (ù = 2ð f
grand)
• La grandeur vitesse pour détecter des phénomènes se situant dans une large gamme
de fréquence
(ù = 2ð f moyen)
19
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
Figure 10: choix de la grandeur de mesure en fonction de la gamme de fréquences
Phases
• La vitesse vibratoire est déphasée de +ð /2 par rapport au déplacement vibratoire
• L’accélération vibratoire est déphasée de +ð /2 par rapport à la vitesse vibratoire et de
ð par rapport au déplacement vibratoire.
4.5. Décibel
Les niveaux de vibrations dus à différents phénomènes, sur une même machine, étant
extrêmement différents, on représente généralement ces valeurs sur une échelle
logarithmique.
C’est pourquoi on a introduit les valeurs en décibels [dB].
On définit :
• Le niveau de vitesse vibratoire :
• Le niveau d’accélération vibratoire :
Exemple : 1 mm/s = 120 dB
4.6. La mesure de A, V et S dans la pratique
Si l'on peut passer indifféremment, par le calcul, d'une grandeur à l'autre à condition de
connaître ù , il faut retenir que dans la pratique, on peut intégrer par un moyen
électronique, mais que dériver un signal par ce même moyen crée un important bruit de
fond qui affecte la qualité de la mesure.
20
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
3. REPRESENTATION DU SIGNAL
3.1 REPRESENTATION EN FONCTION DU TEMPS
le signal vibratoire délivré par un capteur peut être représenté de différentes façons. la
première qui vient à l’esprit est la représentation en fonction du temps (représentation
temporelle). Cette représentation est d’ailleurs utilisée pour suivre le comportement
vibratoire d’une machine en fonction de ses paramètres de fonctionnement (par
exemple, étude de la vibration générée lors de l’ouverture d’un clapet sur un
compresseur à pistons).
Ce type de représentation, aisé à exploiter lorsque le signal est simple (par exemple,
vibration de type sinusoïdal induite par le balourd d’un rotor), devient vite inexploitable
lorsque le signal a pour origine des sollicitations multiples.
Pour qu’il puisse être interprété, le signal doit être décomposé en différentes
composantes sinusoïdales élémentaires. Si cette décomposition est théoriquement
possible, sa représentation dans le domaine temporel devient vite inextricable donc
inexploitable.
3.2 REPRESENTATION SPECTRALE
Faute de pouvoir représenter le signal vibratoire en fonction du temps dans une forme
exploitable, on a cherché à le représenter dans un diagramme amplitude-fréquence
appelé spectre. Avec ce type de représentation, chacune des composantes
sinusoïdales élémentaires du signal est parfaitement définie par son amplitude et sa
fréquence, la représentation spectrale du signal devient ainsi claire et exploitable.
2.1 Cas d’une vibration harmonique
Le mouvement vibratoire le plus simple est sinusoïdal (harmonique). Comme il a été vu
précédemment, ce phénomène est caractérisé par sa période T, mesurée en secondes.
La fréquence f est telle que f = 1/T, et la pulsation ù = 2ð f.
Le déplacement vibratoire s’exprime alors :
Dans le cas d’une vibration sinusoïdale, on vérifie que :
21
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
Ayant mesuré cette valeur, et connaissant la fréquence f, on peut construire un
diagramme appelé « spectre d’amplitude » (figure 11) (voir « les bases de l’analyse en
fréquence ») où l’on va porter la valeur efficace en fonction de la fréquence. Pou une
vibration sinusoïdale, on obtient un point unique, de coordonnées (f, s). En pratique, on
préfère tracer une raie de hauteur s, située à la fréquence f.
figure 11 : spectre d’amplitude d’une vibration harmonique
2.2 Cas d’une vibration périodique, mais non-harmonique
Cette vibration est également de période T, mais sa forme n’est pas sinusoïdale (figure
12).
figure 12 : vibration périodique non sinusoïdale
2.2.1 Déplacement vibratoire
La valeur efficace du déplacement vibratoire s’exprime alors :
On montre qu’une vibration périodique est une somme de vibrations sinusoïdale de
fréquences multiples de f. Son
Spectre est donc constitué de raies aux fréquences f, 2f, 3f, ..., dont les hauteurs sont
égales aux valeurs efficaces de chaque composante sinusoïdale (figure 13).
22
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
Figure 13 : spectre d’amplitude d’une vibration périodique
La valeur efficace globale est calculée à l’aide de la formule suivante :
2.2.2 Vitesse vibratoire.
Si l’on applique l’équation 12 à ce spectre, on constate que les différentes
composantes, exprimées en vitesse vibratoire, ont des amplitudes respectives de :
• v1 = s1 x 2ð f,
• v2 = s2 x 2ð (2f),
• ...
• vn = sn x 2ð (nf),
figure 14 : spectre de vitesse vibratoire d’une vibration périodique
2.2.3 Accélération vibratoire
Si l’on applique l’équation 12 à ce nouveau spectre, on constate que les différentes
composantes, exprimées en
Accélération vibratoire, ont des amplitudes respectives de :
• a1 = s1 x (2ð f)²,
• a2 = s2 x (2ð (2f))²,
• ...
• an = sn x (2ð (nf))²,
23
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
Figure 15 : spectre d’accélération vibratoire d’une vibration périodique
4. STRATEGIE DE SURVEILLANCE : DEPISTAGE ET DIAGNOSTIC
I'objectait de la surveillance des machines par analyse des vibrations a
considérablement évolué ces dernières années. Initialement destinée à mettre
I'installation en sécurité, afin d'éviter des dégradations importantes en déclenchant
directement ou non son arrêt lorsque I'amplitude du mouvement vibratoire atteignait des
valeurs jugées excessives, cette surveillance est devenue le fondement d'une nouvelle
stratégie de maintenance : la maintenance prédictive.
La surveillance doit permettre le dépistage d'anomalies a un stade précoce, le suivi de
leur évolution dans le temps, la planification et la préparation des interventions cor-
rectives en les intégrant si possible pendant les arrêts programmés de la production. Si
dépister une anomalie a un stade précoce et suivre son évolution présentent un grand
intérêt, I'exploitant ou l'homme de maintenance désire au plus en plus connaître la
nature de cette anomalie et sa gravité pour prendre une décision. La réponse a ces
nouvelles exigences est du ressort du diagnostic dont les fondements sont différents
de ceux d'un simple dépistage.
4.1 DEPISTAGE
4.1.1 Notions de seuil et d'indicateur
Le dépistage d'anomalies sur une machine nécessite de procéder, au préalable, au
choix d'un certain nombre d'indicateurs plus ou moins élaborés dont l'évolution dans le
temps, selon le type de suivi choisi, est significative de l'apparition d'une anomalie et de
son aggravation. A chaque indicateur, est associé un seuil dont la valeur dépend du
type d'anomalie d'une part, et des conditions de fonctionnement de la machine à
surveillée d'autre part. Tout dépassement de seuil doit déclencher la mise en œuvre
d'une procédure préalablement définie, comprenant un certain nombre d'opérations
déterminées en fonction du taux de dépassement : validation de I'alarme, diagnostic
plus élabore, modification de la périodicité et du type de suivi, programmation d'une
action corrective, arrêt immédiat de I'installation,...
Surveillance = analyse des principales anomalies
pouvant affecter la machine.
Détermination des + Suivi de l’évolution
Indicateurs de la valeur de
ces indicateurs 24
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
Selon la complexité de la machine surveillée, selon son caractère stratégique pour la
production, selon les défauts que l'on veut suivre et selon la fiabilité désirée, on choisira
de :
— suivre les indicateurs de déplacement, vitesse et accélération :
• En mode global « large bande »,
• En mode global par bandes de fréquences ;
— suivre la forme spectrale des indicateurs par comparaison avec un gabarit ;
— suivre uniquement les indicateurs spécifiques aux roulements.
4.1.2 Suivi des indicateurs en mode global « large bande »
Las indicateurs mesurant l'amplitude efficace (et parfois l'amplitude crête) des
grandeurs physiques ; Déplacement, vitesse, ou accélération, sur une plage de
fréquences très large, généralement la bande passante de l'appareil de mesure.
4.1.3 Suivi des indicateurs en mode global par bandes de fréquences
Pour minimiser le danger d'effet de masque lors du suivi des indicateurs en mode global
« large bande », certains appareils offrent la possibilité de mesurer le(s) indicateur(s) à
l'intérieur de plusieurs bandes de fréquences définies par l'utilisateur et de suivre
l'évolution du niveau global à l'intérieur de chacune de ces bandes.
Le suivi des indicateurs en mode global par bandes de fréquences est une technique
pratique, incontestablement plus fiable que le simple suivi en mode global
« large bande ». Il permet de minimiser l'effet de masque, mais reste insuffisant chaque
fois que subsiste la possibilité de cohabitation de composantes vibratoires
correspondant à plusieurs défauts d'amplitude et de gravité différentes, et ce, à
l'intérieur d'une même bande de fréquences (cas du déséquilibre et du désalignement
dans l'exemple de la moto-soufflante).
25
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
4.1.4 Suivi de !a forme spectrale des indicateurs par comparaison avec un gabarit
Cette technique de dépistage consiste à comparer le spectre vibratoire de la machine
surveillée à un gabarit. Ce gabarit est déterminé à partir d'un spectre dit spectre de
référence obtenu dans des conditions identiques, à un moment où l'état de l'installation
considéré comme satisfaisant. Une alarme peut être déclenchée dès que l'amplitude
d'une composante dépasse le seuil défini, pour cette composante, par le gabarit.
Tout changement significatif du nouveau spectre se traduit par un dépassement du
gabarit, qui déclenche l'alarme.
Gabarit
4.1.5 Suivi des indicateurs spécifiques aux roulements
La plupart des défauts affectant les roulements (caillage, indentation, manque de
graisse, jeux trop importants,...) comme il s’agit généralement de chocs périodiques ou
aléatoires de très courte durée, la plage des fréquences dans laquelle se situent toutes
les composantes élémentaires du phénomène vibratoire peut atteindre plusieurs
centaines de kilohertz. Afin d'isoler ces défauts (généralement, des défauts de
roulements, mais aussi des défauts de dentures, des jeux de clavettes.),de l'ensemble
des phénomènes qui peuvent provenir de l'état de la machine, on peut utiliser des
techniques simples de dépistage spécifique reposant sur la mesure globale des
indicateurs suivants :
— le facteur de crête,
— le kurtosis,
5.1 Facteur de crête
Un roulement neuf ou en bon état génère une vibration de faible amplitude, aussi bien
en valeur crête qu'en valeur efficace. Le facteur de crête, rapport entre ces deux
valeurs, reste donc faible, généralement compris entre 3 et 5.
26
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
.
Facteur de crête
5.2 Kurtosis
Pour un roulement dégradé, présentant des écaillages, des indentations ou des jeux
importants, l'allure de la distribution de l'amplitude du signal est modifiée et le kurtosis K
est supérieur ou égal à 4.
Dans la pratique, on détermine le kurtosis sur plusieurs bandes de fréquences
puisqu'en fonction de l'évolution de la dégradation, le défaut va exciter des modes de
résonance dont les fréquences se situent dans des plages de fréquences différentes. il
est bon de noter que. Dans le cas d'une forte détérioration du roulement, l'allure de la
distribution de l'amplitude redevient gaussienne avec K voisin de 3. Mais aussi une
augmentation importante de l’amplitude efficace. Comme pour le facteur de crête, il y a
lieu de tenir compte simultanément de l'évolution des deux critères : kurtosis et
amplitude efficace.
Facteur K
En conclusion, quelle que soit la technique 3e dépistage choisi (mode global « large
bande... mode global par bandes de fréquences, forme spectrale des indicateurs par
comparaison avec un gabarit, indicateurs spécifiques au* roulements), il convient de ne
pas oublier que le dépistage est, par définition, une stratégie de surveillance réduite
au suivi de l'évolution dans le temps d'un ou de plusieurs indicateurs.
De ce tait, cette stratégie de surveillance n'est applicable que sous réserve que les
conditions de fonctionnement de la machine, principalement sa vitesse et sa charge,
27
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
ainsi que les conditions de mesure sont rigoureusement identiques d'une mesure à
l'autre.
Lorsque ces conditions ne peuvent être réunies, il convient de passer à une stratégie de
diagnostic ou certaines techniques permettent de s'affranchir en partie de cet impératif
et de travailler en « absolu ».
4.2 DIAGNOSTIC
2.1 Définition
Le dépistage a pour objectif de mettre en évidence l'existence d'une anomalie à un
stade précoce et de suivre son évolution. Le diagnostic doit permettre d'identifier avec
précision la nature de l'anomalie et si possible en préciser la gravité. La démarche du
diagnostic est donc fondamentalement différente de celle du dépistage. Elle ne repose
pas sur le choix préalable d'un indicateur ou d'un ensemble d'indicateurs dont on va
surveiller l'évolution dans le temps, mais sur une analyse systématique du signal
vibratoire, tant dans sa forme spectrale que temporelle, pour rechercher la présence
d'images vibratoires de l'ensemble des défauts susceptibles d'affecter l'installation
considérée. Cette analyse systématique s'effectue selon une méthodologie rigoureuse
et fait appel à des techniques de traitement du signal beaucoup plus complexes que
celles généralement mises en œuvre dans le cadre d'une surveillance par dépistage.
2.2 Outils de diagnostic
2.2.1 Spectre
Le spectre est à la base de tout diagnostic. Il permet de visualiser, l'état de santé de la
machine surveillée ; l'origine de chaque composante ou famille de composantes est
identifiée en fonction des caractéristiques cinématiques des différents organes
constitutifs, de leur vitesse de rotation ou mieux encore de leur fréquence de mouve-
ment, puisque le signal prélevé est une composition des réponses des paliers ou de la
structure à toutes les forces d'excitation.
spectre
2.2.2 Zoom
Un grand nombre d'anomalies mécaniques ou électromagnétiques se manifestent, avec
un apport d'énergie faible ou nul, par l'apparition de bandes latérales de modulation
autour d'une fréquence cinématique appelée « fréquence porteuse » (par exemple,
28
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
fréquence de rotation, fréquence d'engrènement, fréquence d'encoches,...) De tels
phénomènes ne sont donc pas décelables par le suivi des indicateurs en mode global.
La fonction zoom, permettant de réduire la plage d'analyse autour d'une fréquence
sélectionnée afin d'obtenir des résolutions satisfaisantes.
Zoom
2.2.3 Cepstre
Cette fonction (transformée inverse du logarithme du spectre) permet, dans un spectre,
de rechercher, d'identifier et de quantifier rapidement toute famille de composantes
périodiques. Ces familles de composantes peuvent se présenter tant sous forme de
peignes de raies que sous forme de bandes latérales de modulation autour d'une
fréquence cinématique (fréquence d'engrènement, fréquence d'encoches, fréquence de
rotation,...).
2.2.4 Démodulation d'amplitude
(Détection d'enveloppe)
La démodulation d'amplitude, appelée plus souvent encore détection d'enveloppe.
C'est un outil d'aide au diagnostic très intéressant sur les machines tournantes. La
démodulation d'amplitude permet en effet d'analyser la forme du signal, notamment
lorsque le défaut recherché excite un mode de résonance de la structure (par exemple,
bagues de roulements, paliers, carters), ce qui est fréquemment le cas en mécanique
où beaucoup de défauts engendrent des forces pulsionnelles qui excitent des
modes de résonance de la structure bien avant de se manifester à leur propre
fréquence cinématique.
La détermination des fréquences de modulation et donc des taux de répétition des
chocs, associée à la connaissance de la cinématique de l'installation, permet de
localiser, voire de déterminer, l'origine du défaut et cela de façon précoce et rapide,
29
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
même lorsque le défaut est noyé dans un bruit de fond dû à l'environnement immédiat
de l'organe incriminé.
5. DETECTION PAR L'ANALYSE SPECTRALE DES PRINCIPALES ANOMALIES
Les anomalies spectrales peuvent être classées en 3 catégories : Pics apparaissant à
des fréquences multiples ou sous multiples de la vitesse du rotor.
Pics apparaissant à des vitesses indépendantes de la vitesse du rotor.
Densité spectrale provenant de composantes aléatoires de la vibration.
5.1. Phénomènes provoquant des pics dont les fréquences sont liées à celle du
rotor
Ce sont principalement les phénomènes de balourd, de désalignement, de mauvais
serrage mécanique, d'avaries d'engrenage, de tourbillonnement de film d huile, d
excitation hydrodynamique, de mauvais état d une courroie de transmission
• Phénomène de balourd
C'est la cause de vibrations la plus commune et la plus fréquemment rencontrée. En
dépit du soin apporté à la construction des rotors, il est impossible de les équilibrer
parfaitement et il existe donc toujours une vibration à la fréquence de rotation dont
l'amplitude est directement proportionnelle à l'importance du balourd et au carré de la
vitesse de rotation.
Une modification brusque de l'amplitude correspond systématiquement à une
modification du balourd dont l'origine peut être une rupture ou la déformation d'une
partie du rotor (ailettes de turbine par exemple). Si cette modification d'amplitude est
plus lente, il peut s'agir d’une ou d’un encrassement de la partie tournante.
Le phénomène de balourd se caractérise par une vibration
radiale importante à la fréquence de rotation.
• Désalignement
Un désalignement provoque des vibrations à la fréquence de rotation ainsi qu'aux
harmoniques d'ordre 2. 3 et parfois 4 (double. triple ou quadruple de la fréquence de
rotation et parfois même davantage en particulier pour les accouplements a denture où
l'on rencontre l’harmonique lié au nombre de dents et à la fréquence de rotation). La
composante axiale de la vibration est particulièrement importante pour I’harmonique d
ordre2.
• Mauvais serrage mécanique
Lorsqu’un palier est desserré ou présente une possibilité de mouvement partiel dans le
plan radial il apparaît une vibration radiale à une fréquence égale à deux fois la vitesse
de rotation. Cette vibration se produit sous l'effet du balourd initial et elle peut prendre
une amplitude élevée en fonction du degré de desserrage du palier.
Une analyse du déphasage entre deux mesures prises orthogonalement sur un même
palier permet de différencier une anomalie due a un balourd (force tournante), d'un
défaut de serrage ou d'une déformation du support (force directionnelle due à la
contrainte).
• Avarie d’engrenage
Dans le phénomène d'engrènement, il se produit un choc chaque fois qu'une dent
menant est en contact avec une dent menée. Ceci génère une vibration dont la fré-
quence est égale à la vitesse de rotation du pignon multipliée par son nombre de
30
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
dents. S'il y a déformation du profil de la denture, la fluctuation de la charge sur la ou
les dents donne naissance à des fluctuations de vitesse et aboutit ainsi a une
modulation de fréquence (ou de phase). L'analyse spectrale de ce phénomène montre
des bandes latérales situées de part et d'autre de la fréquence d'engrènement.
L'analyse du cepstre peut aider à l'identification de ces bandes latérales.
• Tourbillonnement de film d'huile
Ce phénomène apparaît sur les paliers lisses faiblement chargés, lubrifiés en graissage
hydrodynamique. Il se produit légèrement en dessous de la moitié de la fréquence de
rotation de l'arbre (de 0,42 à 0,48 fois la fréquence suivant les caractéristiques du
palier). Ceci, associé à un balourd du rotor et a une fréquence de résonance voisine de
la vitesse de rotation, conduit au phénomène de fouettement du rotor.
• Excitation hydrodynamique
Les variations de pression engendrées par les ailettes d'une turbine passant devant
des ailettes fixes vont créer des vibrations dont la fréquence sera égale à la vitesse de
rotation multipliée par le nombre d'ailettes tournantes et le nombre d'ailettes fixes.
• Courroie de transmission en mauvais état
Le mauvais état d'une courroie en « V » (variation de largeur, déformation) crée des
variations de tension susceptibles d'induire des vibrations de fréquence égale à celle de
la rotation de la courroie. Si les poulies ne sont pas bien alignées, il y aura une
composante axiale importante à cette fréquence.
5.2. Phénomènes créant des pics à des fréquences non liées à celle du rotor
• Vibrations de machines voisines
Le sol et les socles de fixation peuvent transmettre les vibrations d'une machine à
l'autre. Si l'on arrête la machine voisine mise en cause, le pst spectral disparaît.
• Vibrations d'origine électrique
Les vibrations des parties métalliques du stator et du rotor sous l'excitation de champs
électromagnétiques produisent des pics à des fréquences égales à celle du secteur et
à ses harmoniques.
L'augmentation de ces pics peut être le signe de la dégradation du moteur (par
exemple variation de l'entrefer).
Ces pics disparaissent bien évidemment avec la coupure du courant.
• Résonance de la structure ou du rotor
Chaque sous-ensemble de la machine possède une fréquence propre de résonance qui
est fonction de paramètres multiples tels que la rigidité, la masse, la forme
géométrique...
Si une excitation quelconque possède une fréquence voisine de celle de la résonance,
un pic apparaît dans le spectre.
Les machines sont toujours conçues pour que ces fréquences de résonance ne se
rencontrent que dans les régimes transitoires et non au régime de fonctionnement.
5.3. Phénomènes créant des modifications des composantes aléatoires du
spectre
• Cavitation
Ce phénomène hydrodynamique induit des vibrations aléatoires qu'il faut pouvoir
reconnaître pour les éliminer en modifiant les caractéristiques d'aspiration de la
pompe. )l se reconnaît également par un bruit caractéristique.
31
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
• Ecaillage des roulements
L'écaillage d'une piste de roulements provoque des chocs et une résonance du palier
qu'il est facile d'identifier avec un appareil à mesure d'ondes de chocs. En analyse
spectrale, ce phénomène apparaît aux hautes fréquences par une densité spectrale qui
augmente au fur et à mesure que les roulements se détériorent, et sous forme de
« bosses » qu'il est possible d'analyser notamment avec les techniques da « détection
d'enveloppe ».
• Frottements
Le frottement de surfaces comportant des aspérités génère des vibrations d'une
fréquence généralement élevée. L'état de surface et la nature des matériaux en
contact a une influence sur l'intensité et la fréquence des vibrations ainsi créées.
Ces phénomènes sont souvent sporadiques et donc difficiles à analyser et à
surveiller.
6. LE MATERIEL (CHAINE DE MESURE)
La chaîne de mesure doit remplir les fonctions suivantes :
• transformer la vibration mécanique en signal électrique;
C'est le rôle du capteur muni ou non d'un préamplificateur du signal,
• transmettre le signal ou le mettre en mémoire.
C'est le rôle des appareils d'enregistrement analogiques ou des appareils de
numérisation du signal.
• analyser le signal.
C'est le rôle de l'analyseur.
6.1. Les capteurs
Selon la gamme des fréquences étudiées ils doivent mesurer soit le déplacement, soit
!a vitesse ou l'accélération.
Il existe des capteurs spécifiques à chacun de ces paramètres mais l'accéléromètre
ou capteur d'accélération est le type de sonde le plus utilisé en raison de sa large
gamme de fréquences d'utilisation (il peut mesurer un déplacement ou une vitesse) et
de ses faibles dimensions.
6.2. Les enregistreurs
Les informations sont collectées :
§ soit sur magnétophones portatifs qui conservent le
signal en analogique et permettent, pour certains
d'entre eux, de prendre ta mesure de plusieurs points
simultanément et d'étudier le déphasage révélateur de
nombreux défauts;
§ soit sur des appareils à enregistrement numérique qui
sont souvent d'un encombrement plus faible et qui
permettant la programmation de la tournée d'inspection.
6.3. Les analyseurs
Appareils de mesure globale
Lorsqu'on effectue une mesure globale, la fonction de l'analyseur est assez sommaire
En effet, il se borne, dans ce cas, à donner une valeur crête ou une valeur efficace de
l'amplitude du signal mesuré.
32
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
Appareils à filtre accordable
Ce type d'appareil donne des mesures filtrées sur une gamme de fréquence choisie. De
ce fait, on peut avoir une idée approximative de la forme du spectre Pour diminuer la
durée d'exploitation de la gamme complète des fréquences, on utilise des filtres passe-
bande à pourcentage constant plutôt que les filtres à largeur constante.
• Filtre à pourcentage constant
Sa largeur est proportionnelle à la fréquence moyenne d'accord. Un filtre à 4% aura par
exemple une largeur de bande passante de 4 Hz pour une fréquence centrale de '00
Hz et de 40 Hz pour une fréquence centrale de 1 000 Hz.
Ce type de filtre permet de scruter beaucoup plus rapidement les hautes fréquences,
mais ne permet pas, généralement, de déceler les bandes latérales significatives des
défauts d'engrènement, du fait de la largeur de bande trop importante.
• Filtre à largeur de bande constante
Ce type de filtre comme son nom l'indique possède une largeur constante. Il présente
l'inconvénient de nécessiter beaucoup de temps pour couvrir les hautes fréquences.
Analyseurs du spectre en temps réel (FFT)
L'analyseur de spectre en temps réel convertit les données temporelles en données
fréquentielles et permet de voir tous les changements intervenus dans le domaine
des fréquences. Il effectue donc automatiquement la transformation de Fourier soit
par un système analogique soit par un système digital.
33
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
34
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
Détecter les déférents types de défauts qui peuvent apparaître sur le groupe pompe moteur
Voici le schéma synoptique de la chaîne de puissance moteur pompe qui représente les
trois parties essentielles de la chaîne pompe moteur
Moteur Roulement
électrique
Pompe
Réducteur
Description du groupe
- coffret de commande
- capot de protection asservi
- dispositif de charge de roulement
- moteur à deux bouts d’arbres avec N = 1440 tr/min
- pompe monocellulaire : 300l/min à 3000 tr/min
- circuit de refoulement circuit d’aspiration réservoir
- réservoir : 125 l
- réducteur réversible avec un rapport de 1/2
ÉLÉMENTS CINÉMATIQUES
MOTEUR
Roulements
Nb Nb
d’encoches pales
CE COE
48 11 SKF 6219 SKF NU 219
35
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
Réducteur
Nb de dents de l’entrée 53
Nb de dents de sortie 137
FRÉQUENCES CARACTÉRISTIQUES (Hz)
v Fréquence de rotation du moteur : 24,25 Hz
v Fréquence de passage des encoches : 1164 Hz
v Fréquence de passage de pâles de ventilation du moteur : 266 Hz
v Fréquence de rotation de la pompe : 9,38 Hz
1. ROULEMENT D'Essai : 6 206
2. MOTEUR REDUCTEUR
36
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
Composants internes de réducteur
1- Engrenages et arbres en acier au nickel chrome
molybdène.
2-Denture hélicoïdale taillée carbure, superfinie ou
rectifiée après cémentation pour fonctionnement
silencieux.
3-Roulements à billes ou à rouleaux (cylindriques,
coniques ou sphériques) largement dimensionnés pour
longue durée de vie.
4-Joints à double lèvre sur portée traitée, rectifiée,
étanchéité par joints toriques entre carter et flasque.
5-Montage de tous les engrenages sur les arbres à chaud
ou sur cône autobloquant pour grande résistance aux
surcharges
6 - Carter monobloc en fonte renforcée et nervurée
7- Réducteur livré lubrifié prêta l'emploi
8-Bouchons largement dimensionnés pour vidange rapide;
bouchon magnétique livré en standard
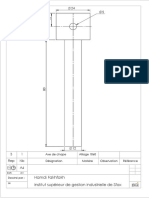
3. POMPE
Description interne de pompe :
37
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
Voici au dessous une image réelle de la pompe utilisée sur la chaîne de puissance :
Dans cette phase il faut préciser les défauts qui sont joints à chaque organe de la
chaîne de puissance et déterminer les points de prélèvement des mesures adéquats
pour chaque défaut. Ce qui oblige de faire un schéma synoptique en déterminant les
points de mesure sur le long de la chaîne moteur – pompe.
Rh1
Rv2
Rh3
Moteur Roulement
Rh6 Rh5
électrique
Rh4
Pompe
Rh2
Réducteur
38
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
Voici un tableau qui représente les défauts qui peuvent apparaître suivant chaque
point de mesure :
Points de RH 1 RH 2 RV 2 RH 3 RH 4 RH 5 RH 6
mesures
Type de défaut
Mécanique
• Balourd x x
• Lignage x x
• Impulseur de x x
pompe
• Passage x x
d’aube x x
• Engrènement
Electromagnétique
• Statorique x x
• Encoche rotor x x
Roulement
• Usure de x x x x x
bague
extérieure,
intérieure,
billes
On prend maintenant les images réelles pour indiquer l’emplacement des points de
mesures :
RH5 RH4 RV2
Pompe Réducteur Moteur Roulement
RH6 RH3 RH2 RH1
39
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
1. COLLECTEURS
Pour la mesure on a utilisée deux types de collecteurs de mesures :
- VT60 comme il indique l’image à
coté, ce type de collecteur
permet de visualiser les signaux
en temps réel, il est aussi utile
lors de mesure des balourds, il
permet de donner la masse et le
déphasage en même temps.
- Le PL302 est un appareil combinant 2 fonctions :
a) Une fonction ANALYSEUR 2 voies FFT temps réel
b) Une fonction COLLECTEUR de données.
Cet analyseur a diverses applications dans les domaines vibratoires, en plus il
fonctionne comme un oscilloscope digital pour les mesures dans le domaine
temporel.
2. Type de Capteur
On utilise comme type de capteur de genre Piézoélectrique – accéléromètre car
ce type fourni plus d’avantages, on peut extraire l’accélération, la vitesse et le
déplacement au même temps.
C’est pour cela qu’on préfère de construire un banc d’essai à l’aide de collecteur
PL302.
3. Logiciel d’analyse DIVA
DIVA est un logiciel de supervision d'un parc
machines dédié à la maintenance. Il traite les
informations collectées de manière périodique
(« Off Line ») ou/et en continu (« On Line »).
Ces informations peuvent être des mesures de
vibration, des résultats d'analyses d'huile ou des
paramètres du procédé.
DIVA sait communiquer. Il peut échanger des
données avec d'autres logiciels (tableurs,
traitements de textes, ...), d'autres secteurs de
l'usine (la production, la gestion, ...), d'autres
sociétés (laboratoires d'analyses d'huile,
télémaintenance et télédiagnostic...).
40
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
4. Déroulement du travaille
5. Analyse par niveaux globaux des défauts
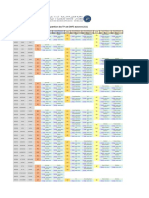
5.1. Tableau de mesures
Point de Type de Fréquence Niveau global Alarme Danger
mesure défaut centrale V (m/s) A (mg) mg mg
Hz
RH 1 Usure de
roulement 20000 12,5 2,78 2g 4g
RH2 balourd
24,25 2 ,97 113 30 100
délignage
48,5 5,46 34 30 100
Défaut
statorique 100 19,6 32,5 100 300
Défaut
1164 5 ,65 32 600 900
rotorique
Roulement de
moteur -- -- -- -- --
RH3 Engrainement
1285,5 2,43 321 2g 4g
de l’entrée
Roulement de
réducteur -- -- -- -- --
RH4 Engrainement
de sortie 3322,25 2,14 544 2g 4g
Roulement de
réducteur -- -- -- -- --
41
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
RH5 Passage
d’aubes 103,18 110 115 100 300
RH6 Délignage
18,76 2 13,34 30 100
Passage
d’aubes 103,18 25,11 88,10 100 300
5.2. Diagnostic des résultats des niveaux globaux des défauts
Défaut Usure de Balourd
Passage Défaut engraine Défaut
Seuil roulement délignage dans le
d’aubes statorique ment rotorique
De jugement de palier moteur
bon
X X X X
Admissible
X X
inadmissibl
e X
Analyse spectrale
Tous les spectres qui seront traitées sont obtenus par un banc d’essai de collecteur
PL302, puis relevées à l’aide de logiciel DIVA.
Palier RH1
P1
42
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
Cette signature de fréquence ne représente aucune anomalie important apparaît sur le
point de mesure RH6, sauf un seule pic qui représente le troisième harmonique de
défaut d’alignement.
Palier RH2
Palier RV2
Défaut
d’alignement
3eme harmonique
43
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
Palier RH3
Défaut
d’alignement
2eme harmonique
Vibration
électromagnétique
statorique
Palier RH4
44
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
Palier RH5
Palier RH6
Cette signature nécessite une amplification Zoom pour identifier les pics de défauts,
derrière la page on prend un autre signe Zoomé
45
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
Pic de balourd
Spectre obtenu de RH6 avec option Zoom pour identifier les 24,25 Hz
fréquences critiques lors de l’analyse
Roulement représentant un défaut
Roulement
Présente un
défaut
46
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
Cette signature représente un défaut sur le palier roulement, il est évident si on le
compare avec la signature de bon roulement
Bon roulement
Forme spectrale de
bon état de
roulement
En conclusion cette stratégie de surveillance n'est applicable que sous
réserve que les conditions de fonctionnement de la machine, principalement sa vitesse
et sa charge, ainsi que les conditions de mesure soient rigoureusement identiques
d'une mesure à l'autre.
Lorsque ces conditions ne peuvent être réunies, il convient de passer à une stratégie de
diagnostic ou certaines techniques permettent de s'affranchir en partie de cet
impératif et de travailler en absolu.
47
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
Commenousavonspu sansdouteleconstater, l’analysedesvibrationsest un outil puissant et
complexe, beaucoup plus complexe et beaucoup plus puissant qu’une simple lecture de
température.
L’un des piliers de la maintenance conditionnelle, l’analyse des vibrations est sans doute la
techniquela plusdiversifiée, la mieux codifiéeet cellequi permet, sur lesmachines tournantes,
d’aller deplusloin danslediagnostic.
Malgrétout, si l’analysevibratoireest latechniqueprivilégiéedelamaintenanceconditionnelle,
voirede la maintenanceprédictive, cen’est pas pour autant un produit miracleque l’on peut
mettreen placesansréflexion.
48
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
49
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
50
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
51
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
52
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
53
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
54
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
55
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
56
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
57
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
Vous aimerez peut-être aussi
- Haute TensionDocument149 pagesHaute TensionRamdane RamdanoPas encore d'évaluation
- Chapitre 3. Nivellement DirectDocument7 pagesChapitre 3. Nivellement DirectDidaBouchPas encore d'évaluation
- Hydraulique MaritimeDocument19 pagesHydraulique MaritimeYounes El-BouznaniPas encore d'évaluation
- Start UpDocument7 pagesStart UpHàmDii FàkhFakhPas encore d'évaluation
- 1-Les MouvementsDocument7 pages1-Les Mouvementsapi-446600404Pas encore d'évaluation
- Puissances en Triphasé 2Document7 pagesPuissances en Triphasé 2Ababacar ThiamPas encore d'évaluation
- Boite A Vitesse PDFDocument16 pagesBoite A Vitesse PDFHàmDii FàkhFakhPas encore d'évaluation
- Institut Supérieur de Gestion Industrielle de Sfax Hamdi FakhfakhDocument1 pageInstitut Supérieur de Gestion Industrielle de Sfax Hamdi FakhfakhHàmDii FàkhFakhPas encore d'évaluation
- Fiabilite Boite Auto DSG La Liste Des Modeles A Problemes PDFDocument5 pagesFiabilite Boite Auto DSG La Liste Des Modeles A Problemes PDFHàmDii FàkhFakhPas encore d'évaluation
- Etude Du Phenomene de Bruit Et - CHAKIR Lina - 3576 PDFDocument57 pagesEtude Du Phenomene de Bruit Et - CHAKIR Lina - 3576 PDFHàmDii FàkhFakhPas encore d'évaluation
- Boite VitesseDocument16 pagesBoite Vitesserabie_zitoun80% (5)
- Presentation Mini ProjetDocument27 pagesPresentation Mini ProjetHàmDii FàkhFakhPas encore d'évaluation
- Nucleaire 2 BACDocument6 pagesNucleaire 2 BACaymanebenaissa20Pas encore d'évaluation
- Exercices D'applicationDocument1 pageExercices D'applicationHAMADA1972Pas encore d'évaluation
- Chapitre IIIDocument21 pagesChapitre IIIOussama MaarirPas encore d'évaluation
- 2007 09 National Exo3 Sujet Kepler 4ptsDocument3 pages2007 09 National Exo3 Sujet Kepler 4ptsDana TRABELSIPas encore d'évaluation
- Exercice 1: PHYSIQUE / Unité:1 Propagation D'Une Onde-Ondes ProgressivesDocument1 pageExercice 1: PHYSIQUE / Unité:1 Propagation D'Une Onde-Ondes ProgressivesHamza AttabanePas encore d'évaluation
- Serie MVT Champ MagnetiqueDocument3 pagesSerie MVT Champ Magnetiquesouleymen fredjPas encore d'évaluation
- NEMBE Fortunat AymericDocument122 pagesNEMBE Fortunat Aymericgaetanakoulou7Pas encore d'évaluation
- AerodynamiqueDocument7 pagesAerodynamiqueNadia ElbouaazzaouiPas encore d'évaluation
- DS 3Document7 pagesDS 3Mael SouprayenPas encore d'évaluation
- MQII-Série 1-2014-15Document4 pagesMQII-Série 1-2014-15Ayoub VbPas encore d'évaluation
- Série de TD n2 23-24Document2 pagesSérie de TD n2 23-24Aymen BouzalekhPas encore d'évaluation
- 1943-01 - Protection Contre La FoudreDocument2 pages1943-01 - Protection Contre La FoudreyooolPas encore d'évaluation
- Preparation MemoireDocument4 pagesPreparation MemoireImed BdjPas encore d'évaluation
- Pvsyst Tutorial v7 Pumping 2 FRDocument24 pagesPvsyst Tutorial v7 Pumping 2 FRait ijjaPas encore d'évaluation
- tp1 Alternateur TriphaséDocument8 pagestp1 Alternateur TriphasékaraliPas encore d'évaluation
- Physique SVTDocument78 pagesPhysique SVTRich CartmanPas encore d'évaluation
- Chapitre 5 Les Variateurs de VitesseDocument10 pagesChapitre 5 Les Variateurs de Vitessedallagi mohamedPas encore d'évaluation
- Chapitre 14Document48 pagesChapitre 14ABELWALID100% (2)
- Corrigé - DM 9Document4 pagesCorrigé - DM 9Brandy OdonnellPas encore d'évaluation
- Chapitre 14 Diagramme e PHDocument9 pagesChapitre 14 Diagramme e PHAbdelhakim BailalPas encore d'évaluation
- TP 2Document9 pagesTP 2salmabellakhyaletPas encore d'évaluation
- Tarification Et Compensation de L 1Document7 pagesTarification Et Compensation de L 1Nour zPas encore d'évaluation
- Calendrier Prévisionel3 TP SMP3 CompressedDocument11 pagesCalendrier Prévisionel3 TP SMP3 CompressedTahar didouchPas encore d'évaluation
- 6 Act14Document8 pages6 Act14NahilPas encore d'évaluation
- 1cm36ijdd 291884Document9 pages1cm36ijdd 291884ndiayePas encore d'évaluation