Vous aimerez peut-être aussi
- Tableaux Des Unites de Mesure PDFDocument1 pageTableaux Des Unites de Mesure PDFMaster CIL100% (2)
- Nedilsabiha SadizohraDocument90 pagesNedilsabiha SadizohraJean-Pierre AwuPas encore d'évaluation
- CAMPDocument13 pagesCAMPJean-Pierre AwuPas encore d'évaluation
- VAREXP - DAT (Version 2.04) 1. L'import - Export de Variables Se Fait Grâce Au Fichier VAREXP - DAT.Document19 pagesVAREXP - DAT (Version 2.04) 1. L'import - Export de Variables Se Fait Grâce Au Fichier VAREXP - DAT.Jean-Pierre AwuPas encore d'évaluation
- Prise en Main Du Logiciel PCVUE32Document40 pagesPrise en Main Du Logiciel PCVUE32Jean-Pierre AwuPas encore d'évaluation
- Didacticiel PcvueDocument38 pagesDidacticiel PcvueJean-Pierre AwuPas encore d'évaluation
- 5 - Ordr Physique2Document9 pages5 - Ordr Physique2Jean-Pierre AwuPas encore d'évaluation
- Magelis - Visualisation de Nombres-V2Document49 pagesMagelis - Visualisation de Nombres-V2Jean-Pierre AwuPas encore d'évaluation
- Asservissement de Vitesse Du MCCDocument48 pagesAsservissement de Vitesse Du MCCJean-Pierre AwuPas encore d'évaluation
- Exo 24 Reglage Des Marges de Phase Gain Avec Un Cor PropDocument4 pagesExo 24 Reglage Des Marges de Phase Gain Avec Un Cor PropJean-Pierre AwuPas encore d'évaluation
- Laboratoire 1Document9 pagesLaboratoire 1Jean-Pierre AwuPas encore d'évaluation
- Fiche Cours BodeDocument4 pagesFiche Cours BodeJean-Pierre AwuPas encore d'évaluation
- Chap 5 AutDocument18 pagesChap 5 AutJean-Pierre AwuPas encore d'évaluation
- Résumé de Cours - Transformation de LaplaceDocument3 pagesRésumé de Cours - Transformation de LaplaceJean-Pierre AwuPas encore d'évaluation
- Guide IdentificationDocument1 pageGuide IdentificationJean-Pierre AwuPas encore d'évaluation
- BM4205 PDFDocument3 pagesBM4205 PDFMustapha LarajPas encore d'évaluation
- Exercices Corriges StatistiqueDocument17 pagesExercices Corriges StatistiqueAmidou Dieme100% (1)
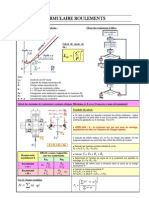
- RoulementsDocument1 pageRoulementsissatkaPas encore d'évaluation
- Exercices ProduitScalaireTSTD2ADocument4 pagesExercices ProduitScalaireTSTD2Amohamednajmii766Pas encore d'évaluation
- Identification Des Systèmes Dynamiques-Cours 2021Document10 pagesIdentification Des Systèmes Dynamiques-Cours 2021AWATIF ESHAIMIPas encore d'évaluation
- Chapitre 7Document7 pagesChapitre 7Saeid HegazyPas encore d'évaluation
- Rapport de La ProjetDocument20 pagesRapport de La ProjetTith ReaksmeyPas encore d'évaluation
- TorsionDocument5 pagesTorsionM'ed El'BkPas encore d'évaluation
- Traitement Des EauxDocument76 pagesTraitement Des EauxAmal Alaoui100% (3)
- Tuyauterie Et Vannes French-EnglishDocument200 pagesTuyauterie Et Vannes French-Englishmahmoudmain_2427331775% (4)
- 4023507Document65 pages4023507Yanis ALLICHEPas encore d'évaluation
- Polycopié BELHAMIANIDocument36 pagesPolycopié BELHAMIANIHabet Sara50% (2)
- Gestion Et Exploitation Des Resaux D Eau Potable1Document72 pagesGestion Et Exploitation Des Resaux D Eau Potable1lot4100% (1)
- nf055 Doc Tech 5 Groupe Pression Oriente Biaxial Rev 01 230719Document21 pagesnf055 Doc Tech 5 Groupe Pression Oriente Biaxial Rev 01 230719mohamed roubioPas encore d'évaluation
- Conduction RadialDocument8 pagesConduction RadialBilal Bouakrif100% (2)
- Mohamed Amine Sbai - CV - FrancaisDocument1 pageMohamed Amine Sbai - CV - FrancaisMohamed Amine SbaiPas encore d'évaluation
- Lagrange Et Éuation de KéplerDocument17 pagesLagrange Et Éuation de Képlerchristianbandre392Pas encore d'évaluation
- Suivi & Modélisation Unité de Cogénération Industrielle, Thermoptim, Beau de Rochas,cas réel dans l'industrie, calcul rendement unité cogénération, gaz naturel, Etude installation cogénération, Zied Abdallah, Slama Frères Tunisia, Bilan puissances, Rendement CHP unit......Document79 pagesSuivi & Modélisation Unité de Cogénération Industrielle, Thermoptim, Beau de Rochas,cas réel dans l'industrie, calcul rendement unité cogénération, gaz naturel, Etude installation cogénération, Zied Abdallah, Slama Frères Tunisia, Bilan puissances, Rendement CHP unit......Zied Abdallâh100% (4)
- Le Mimoire de Fin D'etude 2013Document149 pagesLe Mimoire de Fin D'etude 2013ciber ramzi100% (1)
- Bat Physiques 2Document12 pagesBat Physiques 2Rebecca AmaniPas encore d'évaluation
- Deimos DetecteurDocument3 pagesDeimos DetecteurRémi DUGRAVOTPas encore d'évaluation
- Grandeurs Scalaires Et Vectorielles CorrectionDocument4 pagesGrandeurs Scalaires Et Vectorielles CorrectionLAMARTI Amal100% (1)
- TopographieDocument3 pagesTopographieYacouba Gana100% (1)
- SERIE Corrrige Transformations Lentes Et Rapides. FacteursDocument12 pagesSERIE Corrrige Transformations Lentes Et Rapides. Facteursonlx 98Pas encore d'évaluation
- CentraleSupélec 1985 MP Mathématiques 1 EaDocument2 pagesCentraleSupélec 1985 MP Mathématiques 1 Eagame12481632Pas encore d'évaluation
- 04 Abaques de Flexion ComposeeDocument93 pages04 Abaques de Flexion Composeebastophe100% (1)
- Syllabus ÉlectricitéDocument91 pagesSyllabus ÉlectricitéArthur LeroyPas encore d'évaluation
- 2 Caractéristiques Mécaniques Du Bois EC5Document7 pages2 Caractéristiques Mécaniques Du Bois EC5Tellache MohamedPas encore d'évaluation
- En 12390-4Document16 pagesEn 12390-4MOHAMMADPas encore d'évaluation