Vous aimerez peut-être aussi
- Esolex STI2D - Activité N°1 - Diagrammes SYSML - PartielDocument3 pagesEsolex STI2D - Activité N°1 - Diagrammes SYSML - PartielKarimPas encore d'évaluation
- Chapitre 1 Rappels Les Machines Asynchrones TriphaseesDocument9 pagesChapitre 1 Rappels Les Machines Asynchrones TriphaseesbsamatrbsPas encore d'évaluation
- Pale 4 Bis SujetDocument14 pagesPale 4 Bis SujetMatéoPas encore d'évaluation
- CCS MP 2016 BrasManipulateurCollaboratif SujetDocument15 pagesCCS MP 2016 BrasManipulateurCollaboratif Sujetkim AYAPas encore d'évaluation
- Technologie-DNB-Blanc-chariot-élévateur-corrigéDocument3 pagesTechnologie-DNB-Blanc-chariot-élévateur-corrigéSOARESPas encore d'évaluation
- Les Ascenseurs À Traction À CâblesDocument13 pagesLes Ascenseurs À Traction À Câblesxavierxavier074Pas encore d'évaluation
- Demag CC5800Document50 pagesDemag CC5800micky ringPas encore d'évaluation
- Demag 80Document21 pagesDemag 80Ayien MuhammadPas encore d'évaluation
- 3.camper TrolleyDocument3 pages3.camper TrolleykrommPas encore d'évaluation
- WsDocument58 pagesWsanass sbniPas encore d'évaluation
- Présentation Théorique STSDocument87 pagesPrésentation Théorique STShattachPas encore d'évaluation
- AC 250-1 All Terrain CraneDocument26 pagesAC 250-1 All Terrain CraneMatheus Pires PereiraPas encore d'évaluation
- Demag AC250-1 Load ChartDocument17 pagesDemag AC250-1 Load ChartD Chandra Sekhar0% (1)
- Sujet Bilan MPSI2 MPII 22 23Document19 pagesSujet Bilan MPSI2 MPII 22 23bhffuhPas encore d'évaluation
- TD Transpalette CorrectionDocument3 pagesTD Transpalette Correctionkaoutartayb64Pas encore d'évaluation
- Monte Escaliers Pour PMR: Nom Du Candidat: Mhamdi Ayman Numéro SCEI: 8467Document28 pagesMonte Escaliers Pour PMR: Nom Du Candidat: Mhamdi Ayman Numéro SCEI: 8467ahmedelhelymyPas encore d'évaluation
- Guide AscenseurDocument25 pagesGuide Ascenseurvsdfsd258Pas encore d'évaluation
- Terex Demag AC 200 1Document44 pagesTerex Demag AC 200 1jhehernaPas encore d'évaluation
- Catalogue Convoyeur Aluminium PDFDocument28 pagesCatalogue Convoyeur Aluminium PDFnawramiPas encore d'évaluation
- Demag CC-280Document22 pagesDemag CC-280KoahyPas encore d'évaluation
- Grafcet D'un AscenseurDocument58 pagesGrafcet D'un AscenseurBourgui Ibrahim100% (3)
- Terex-Demag-TC-2500 (1) 450 T PDFDocument36 pagesTerex-Demag-TC-2500 (1) 450 T PDFMohamed FathyPas encore d'évaluation
- Terex-Demag-AC-200-1 MJCT PDFDocument44 pagesTerex-Demag-AC-200-1 MJCT PDFCông Ty CP Vận Tải Đa Quốc Gia100% (3)
- Mobile Crane 500T - Terex AC 500-2 PDFDocument62 pagesMobile Crane 500T - Terex AC 500-2 PDFSonNguyenPas encore d'évaluation
- Demag CC-200Document16 pagesDemag CC-200KoahyPas encore d'évaluation
- XN ManualDocument36 pagesXN ManualShane PPas encore d'évaluation
- Rapport Du Stage Effectué Du 01/11/2022 Au 30/11/2022: Dans L'entrepriseDocument26 pagesRapport Du Stage Effectué Du 01/11/2022 Au 30/11/2022: Dans L'entrepriseHamza MahdaouiPas encore d'évaluation
- Demag CC 2400Document74 pagesDemag CC 2400iksolovPas encore d'évaluation
- Terex All Terrain Cranes Spec Ecab2eDocument40 pagesTerex All Terrain Cranes Spec Ecab2eMarco ThulliuPas encore d'évaluation
- Mechanic U Static 2 - FRDocument25 pagesMechanic U Static 2 - FRahmedelbakhkhakh478Pas encore d'évaluation
- EVF 2021 Conference Program 3Document14 pagesEVF 2021 Conference Program 3Abdellah El BarkanyPas encore d'évaluation
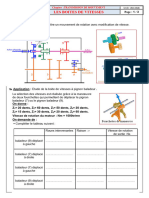
- Boites de VitessesDocument3 pagesBoites de VitessesAhlèm SààdàouiPas encore d'évaluation
- Demag CC8800-1 TWINDocument40 pagesDemag CC8800-1 TWINmicky ringPas encore d'évaluation
- Demag CC8800-1Document60 pagesDemag CC8800-1micky ringPas encore d'évaluation
- TP Deformation PortiqueDocument12 pagesTP Deformation PortiqueAla KhazriPas encore d'évaluation
- Asservissement SiiDocument6 pagesAsservissement Siiomar badriPas encore d'évaluation
- CCP PSI 2017 OuvrantsPilotesAutomobiles SujetDocument20 pagesCCP PSI 2017 OuvrantsPilotesAutomobiles SujetloanprisouPas encore d'évaluation
- Soulaima Kheder TP FraisageDocument8 pagesSoulaima Kheder TP Fraisagesoulaima khederPas encore d'évaluation
- 450 Ton - TC2500 - TEREXDocument36 pages450 Ton - TC2500 - TEREXJSArocenaPas encore d'évaluation
- Ac 100 4l Metric Datasheet (En de FR It Es PT Ru)Document84 pagesAc 100 4l Metric Datasheet (En de FR It Es PT Ru)Franco CeaPas encore d'évaluation
- Demag All Terrain Cranes Spec E16cfdDocument62 pagesDemag All Terrain Cranes Spec E16cfdAlberto AlonsoPas encore d'évaluation
- Technologie FerroviaireDocument9 pagesTechnologie FerroviaireJonathan Rogers100% (1)
- CC2000 1Document78 pagesCC2000 1micky ringPas encore d'évaluation
- Demag All Terrain Cranes Spec 1a1988Document62 pagesDemag All Terrain Cranes Spec 1a1988tomspetcoPas encore d'évaluation
- Demag All Terrain Cranes Spec 4028a8Document48 pagesDemag All Terrain Cranes Spec 4028a8Łukasz SkonecznyPas encore d'évaluation
- Tech-Lève Personne - ÉlèveDocument14 pagesTech-Lève Personne - ÉlèveremivsnPas encore d'évaluation
- Grúa Móvil Demag AC 120 1Document24 pagesGrúa Móvil Demag AC 120 1ignacio_vazquez_180% (1)
- 07 Guide AscenseurDocument25 pages07 Guide AscenseurSimou El MahmodiPas encore d'évaluation
- Terex-CC8800-1 (1600T)Document60 pagesTerex-CC8800-1 (1600T)Nguyen Quoc VuPas encore d'évaluation
- devoir-cont-N°1-1s4-El 3ahdDocument4 pagesdevoir-cont-N°1-1s4-El 3ahdwarda yahyaouiPas encore d'évaluation
- Travaux Pratiques Simulation Des Réseaux Electriques 2-Ème PartieDocument11 pagesTravaux Pratiques Simulation Des Réseaux Electriques 2-Ème PartieMehdi IdrissiPas encore d'évaluation
- Base TC200 Tecdron: 4 Heures Calculatrice AutoriséeDocument19 pagesBase TC200 Tecdron: 4 Heures Calculatrice AutoriséeMohammed RabiPas encore d'évaluation
- Formation - ARCODEDocument43 pagesFormation - ARCODEJaouad LahdarPas encore d'évaluation
- Terex Demag AC 200 1Document44 pagesTerex Demag AC 200 1ORLANDO CASTILLO100% (1)
- Demag AC500 1 Spec EuDocument48 pagesDemag AC500 1 Spec EuHoward HoacPas encore d'évaluation
- Ac 60 3 Metric Datasheet en de FR It Es PT RuDocument48 pagesAc 60 3 Metric Datasheet en de FR It Es PT RuFranco CeaPas encore d'évaluation
- Terex Demag AC 60 2F3 28L 29Document32 pagesTerex Demag AC 60 2F3 28L 29ismael estayPas encore d'évaluation
- Théorie et pratique du treuil: Treuils fixes et mobilesD'EverandThéorie et pratique du treuil: Treuils fixes et mobilesPas encore d'évaluation
- Windvane Report: Régulateurs d'allure, un voyage à travers le tempsD'EverandWindvane Report: Régulateurs d'allure, un voyage à travers le tempsPas encore d'évaluation
- Polycope Cours Mecanique Du Point LAMSAADIDocument59 pagesPolycope Cours Mecanique Du Point LAMSAADIMohamed Driouch100% (2)
- CNDDocument81 pagesCNDMohamed Hammi Gmp100% (3)
- 11 - PERT CorrigéDocument4 pages11 - PERT CorrigéMed Ali MaatougPas encore d'évaluation
- La Fonction MaintenanceDocument6 pagesLa Fonction MaintenanceAymen HssainiPas encore d'évaluation
- Tigra 2 CF 510-510R 710-710RDocument58 pagesTigra 2 CF 510-510R 710-710RIceman 290% (1)
- Refraction CorDocument4 pagesRefraction CorFatma LetaiefPas encore d'évaluation
- Sechage de Fruits 2.2016Document4 pagesSechage de Fruits 2.2016Zak Arya100% (1)
- ROBA-stop - M: Freins de Sécurité ÉlectromagnétiquesDocument20 pagesROBA-stop - M: Freins de Sécurité ÉlectromagnétiquesDarkedgePas encore d'évaluation
- NNNNNNNDocument7 pagesNNNNNNNGhani LamiPas encore d'évaluation
- 02 - Role Des ActeursDocument28 pages02 - Role Des ActeursTHONY100% (1)
- TransformerDocument34 pagesTransformerabdelhak100% (1)
- Quartier Durable PUCA MarseilleDocument7 pagesQuartier Durable PUCA Marseillehamoudi anfelPas encore d'évaluation
- Chapitre 1 Introduction Réseaux ElectriquesDocument22 pagesChapitre 1 Introduction Réseaux ElectriquesBoutaïna Bouzidi Idrissi67% (3)
- Recyclage Dechets Plastiques Converti ConvertiDocument15 pagesRecyclage Dechets Plastiques Converti ConvertiYoo BahPas encore d'évaluation
- Table Des MatièresDocument11 pagesTable Des Matièreshassan kacimiPas encore d'évaluation
- Fifiche de ThermoDocument17 pagesFifiche de ThermoJulio DibangoupPas encore d'évaluation
- Cahier Explicatif Plomberie PDFDocument96 pagesCahier Explicatif Plomberie PDFMax100% (1)
- 3as Phy Livre Francais CoursDocument345 pages3as Phy Livre Francais CoursbosmenPas encore d'évaluation
- Cours Electricite MagnetismeDocument16 pagesCours Electricite Magnetismemohand72Pas encore d'évaluation
- Mallet TeDocument2 pagesMallet TeomarPas encore d'évaluation
- sp-100-3 TORNILLODocument16 pagessp-100-3 TORNILLOAnder LertxundiPas encore d'évaluation
- CV AsmaeDocument1 pageCV AsmaeAissaoui YounesPas encore d'évaluation
- Pfe GM 0010-1Document135 pagesPfe GM 0010-1Rodrigue MWehuPas encore d'évaluation
- De La Stratégie À La GéopolitiqueDocument16 pagesDe La Stratégie À La GéopolitiqueNessma HikmatPas encore d'évaluation
- Projet de Mci L-Jetronic-ConvertiDocument34 pagesProjet de Mci L-Jetronic-ConvertiHamza YahiaouiPas encore d'évaluation
- Cadre CONTRIBUTION CEE - ModèleDocument2 pagesCadre CONTRIBUTION CEE - Modèleromelusjeanmarie.proPas encore d'évaluation
- Feuilletage 861Document30 pagesFeuilletage 861wajdi rekikPas encore d'évaluation
- CM Machine SynchroneDocument24 pagesCM Machine SynchroneReggani MbarekPas encore d'évaluation
- TD 1 T THermiqueDocument2 pagesTD 1 T THermiqueAli Z. Kanjo100% (3)