Vous aimerez peut-être aussi
- Exercices d'optique et d'électromagnétismeD'EverandExercices d'optique et d'électromagnétismeÉvaluation : 5 sur 5 étoiles5/5 (1)
- Dephasage Tension-CourantDocument13 pagesDephasage Tension-Courantapi-2623540094% (17)
- TP Moteur AsynchroneDocument14 pagesTP Moteur AsynchroneJulian100% (8)
- Alternateur TriphaseDocument29 pagesAlternateur TriphaseDerrouch Abderrahmane0% (1)
- Cours MCCDocument12 pagesCours MCChouss11100% (4)
- Machines Synchrones Et AsynchronesDocument18 pagesMachines Synchrones Et AsynchronesbenhabriaPas encore d'évaluation
- Commande Vectorielle Moteur Asynchrone PDFDocument2 pagesCommande Vectorielle Moteur Asynchrone PDFJodyPas encore d'évaluation
- Alternateur SynchroneDocument18 pagesAlternateur SynchroneAlex PittPas encore d'évaluation
- TP Redressement FiltrageDocument12 pagesTP Redressement Filtrageواعر ياسينPas encore d'évaluation
- Techniques de Bobinage Des Stators Des Machines À Courant AlternatifDocument96 pagesTechniques de Bobinage Des Stators Des Machines À Courant Alternatiffayssal2250% (2)
- EleDocument25 pagesEleRebahi FaresPas encore d'évaluation
- Cours Sur Les Machines Synchrones Triphasés - Vesion3 - 2Document26 pagesCours Sur Les Machines Synchrones Triphasés - Vesion3 - 2Mohamed Berrached100% (1)
- AlternateurDocument7 pagesAlternateurJamaaPas encore d'évaluation
- SCHEMA CHP2. (Les Démarrages)Document22 pagesSCHEMA CHP2. (Les Démarrages)Dankov2Pas encore d'évaluation
- CM Machine SynchroneDocument24 pagesCM Machine SynchroneAbdou VerrattiPas encore d'évaluation
- CM Machine SynchroneDocument24 pagesCM Machine SynchroneAsm MaPas encore d'évaluation
- TP Machine 02 Et 01Document12 pagesTP Machine 02 Et 01Îslãm MïmøPas encore d'évaluation
- TP M1 - Alternateur - Synchrone - Autonome PDFDocument3 pagesTP M1 - Alternateur - Synchrone - Autonome PDFKhī RãPas encore d'évaluation
- Quadri PolesDocument8 pagesQuadri Polesolivpat26Pas encore d'évaluation
- GE1 M07A Résumé Du 4eme Chapitre 20-21Document5 pagesGE1 M07A Résumé Du 4eme Chapitre 20-218pdmnxvqznPas encore d'évaluation
- Cours - Machines SynchroneDocument32 pagesCours - Machines SynchroneAaffan abdelazizPas encore d'évaluation
- Cours Lp3eme Chapitre Moteur AsynchroneDocument15 pagesCours Lp3eme Chapitre Moteur AsynchroneSimo LaassiriPas encore d'évaluation
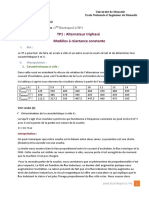
- TP1: Alternateur Triphasé Modèles À Réactance Constante: Réaliser Par: Hassine Abir Classe & Filiére & GroupeDocument2 pagesTP1: Alternateur Triphasé Modèles À Réactance Constante: Réaliser Par: Hassine Abir Classe & Filiére & GroupeSarra SdiriPas encore d'évaluation
- Alternateur TriphaseDocument6 pagesAlternateur TriphaseBabacar TounkaraPas encore d'évaluation
- TP1: Alternateur Triphasé Modèles À Réactance Constante: Réaliser Par: Hassine Abir Classe & Filiére & GroupeDocument2 pagesTP1: Alternateur Triphasé Modèles À Réactance Constante: Réaliser Par: Hassine Abir Classe & Filiére & GroupeSarra SdiriPas encore d'évaluation
- TP n03 Moteur A Courant Continu Elm s5!20!21 1Document3 pagesTP n03 Moteur A Courant Continu Elm s5!20!21 1Ondjy Manchiny ValmirPas encore d'évaluation
- ElectroniqueDocument5 pagesElectroniqueglbzhnpPas encore d'évaluation
- E Cont Phase1 PDFDocument5 pagesE Cont Phase1 PDFOmar KhayyamPas encore d'évaluation
- E Cont Phase1 PDFDocument5 pagesE Cont Phase1 PDFiramole med100% (1)
- E Cont Phase1Document5 pagesE Cont Phase1ladabd2Pas encore d'évaluation
- Sujet DS3 1TSI1 30 - 01 - 2020Document2 pagesSujet DS3 1TSI1 30 - 01 - 2020Achraf AlaouiPas encore d'évaluation
- Alternateur CoursDocument8 pagesAlternateur Coursi kPas encore d'évaluation
- Autopilot AgeDocument15 pagesAutopilot Agesaidoune abdelmalekPas encore d'évaluation
- CR MeDocument16 pagesCR MenouarPas encore d'évaluation
- Trigger de ShmittDocument7 pagesTrigger de Shmittmajido777Pas encore d'évaluation
- GHERIB - LIMAM - DJEDI - Beneddine - TP M2 - EPCDocument9 pagesGHERIB - LIMAM - DJEDI - Beneddine - TP M2 - EPCAmr AmrPas encore d'évaluation
- Machine Synchrone: Table Des MatièresDocument11 pagesMachine Synchrone: Table Des MatièresKone OusmanePas encore d'évaluation
- Machine Synchrone3Document11 pagesMachine Synchrone3Aboubacar CissePas encore d'évaluation
- Cours Résumé Machine Electrique À Courant ContinuDocument10 pagesCours Résumé Machine Electrique À Courant ContinuMohamed Amine TouatiPas encore d'évaluation
- Ele2302 Solutionnaire Examen Aut06 2Document2 pagesEle2302 Solutionnaire Examen Aut06 2red67% (3)
- Cour TP MACHINES ASY Fonctionnement GeneratriceDocument5 pagesCour TP MACHINES ASY Fonctionnement GeneratricesalahouchenesalahPas encore d'évaluation
- Exam 2016 Session 2 Cor PDFDocument5 pagesExam 2016 Session 2 Cor PDFReda HQPas encore d'évaluation
- M1 ELN - TP Outils de SimulationDocument6 pagesM1 ELN - TP Outils de SimulationAudace DidaviPas encore d'évaluation
- Generatrices A Courant ContinuDocument12 pagesGeneratrices A Courant ContinuHajri Mohamed100% (2)
- Examen ElecFond1 Jan 2018 Final1Document8 pagesExamen ElecFond1 Jan 2018 Final1Azzeddine AzzeddinePas encore d'évaluation
- Transistors A Commutation PDFDocument6 pagesTransistors A Commutation PDFAmigoAlgerainoPas encore d'évaluation
- Résumé - Transistor Bipolaire en Régime StatiqueDocument5 pagesRésumé - Transistor Bipolaire en Régime StatiqueMohamed Lachhab100% (1)
- TD - Instrum 21 22Document32 pagesTD - Instrum 21 22Ouma ImaPas encore d'évaluation
- TEA7 MEL - SupportDocument20 pagesTEA7 MEL - Supportkvg67tk7wzPas encore d'évaluation
- 7theoreme GenerauxdepotDocument7 pages7theoreme Generauxdepotzied houanebPas encore d'évaluation
- TD3 - Electronique Des Systã Mes - Oscillateurs HarmoniquesDocument3 pagesTD3 - Electronique Des Systã Mes - Oscillateurs HarmoniquesmidoPas encore d'évaluation
- Chap 03 Amplificateurs Petits SignauxDocument7 pagesChap 03 Amplificateurs Petits Signauxhoussem eddinPas encore d'évaluation
- TakreDocument4 pagesTakreeddysarah041Pas encore d'évaluation
- Machine Synchrone: Pôles LissesDocument13 pagesMachine Synchrone: Pôles LissesBelkacem Nadir100% (1)
- 70185588theoreme Generaux Relatifs Aux Reseaux Electriques PDFDocument6 pages70185588theoreme Generaux Relatifs Aux Reseaux Electriques PDFxiguerhzifenxPas encore d'évaluation
- Cours moteurCCDocument9 pagesCours moteurCClarabiPas encore d'évaluation
- Les QuadripolesDocument23 pagesLes QuadripolesIsmail Lasri100% (1)
- Simulation D'un Hacheur Série Et Commande D'un Moteur À Courant ContinuDocument4 pagesSimulation D'un Hacheur Série Et Commande D'un Moteur À Courant ContinumarPas encore d'évaluation
- Chap II: Entrainement Par Un Moteur À Courant Continu:: N PN N N/aDocument12 pagesChap II: Entrainement Par Un Moteur À Courant Continu:: N PN N N/aoriginyoucef17Pas encore d'évaluation
- TP 4 Circuits RC RLDocument6 pagesTP 4 Circuits RC RLRosa Babe0% (1)
- 1 TD Esc2 2020-21Document22 pages1 TD Esc2 2020-21abdsalam elhadriPas encore d'évaluation
- Solut6 PDFDocument3 pagesSolut6 PDFMarie MimiiPas encore d'évaluation
- Chap 03 Amplificateurs Petits SignauxDocument11 pagesChap 03 Amplificateurs Petits SignauxBassmala BaraaPas encore d'évaluation
- Chapitre 4Document8 pagesChapitre 4ali hadjiPas encore d'évaluation
- TP1 3L EltDocument5 pagesTP1 3L EltReggani MbarekPas encore d'évaluation
- Corrige TDN1Document6 pagesCorrige TDN1Reggani Mbarek100% (1)
- Corrigé td3Document5 pagesCorrigé td3Reggani MbarekPas encore d'évaluation
- Energie Eolienne Partie BDocument2 pagesEnergie Eolienne Partie BReggani MbarekPas encore d'évaluation
- Mohamed Soltane Prof. Dr. - m1 - Ethique Et Deontologie Prop. Intellect. - s2 - 2020 - Parti Ii - Recherche Integre Et ResponsableDocument7 pagesMohamed Soltane Prof. Dr. - m1 - Ethique Et Deontologie Prop. Intellect. - s2 - 2020 - Parti Ii - Recherche Integre Et ResponsableReggani MbarekPas encore d'évaluation
- F Module Solaire Avec Mulateur de SoleilDocument1 pageF Module Solaire Avec Mulateur de SoleilReggani MbarekPas encore d'évaluation
- Convertisseur BuckDocument28 pagesConvertisseur BuckDave KrauserPas encore d'évaluation
- Éthique Et Déontologie - Support Cours - PARTI IDocument4 pagesÉthique Et Déontologie - Support Cours - PARTI IReggani Mbarek100% (1)
- Cours Resumé QEE en LigneDocument3 pagesCours Resumé QEE en LigneReggani MbarekPas encore d'évaluation
- Qee Chap1Document7 pagesQee Chap1Reggani MbarekPas encore d'évaluation
- Td3 Machine AsynchroneDocument5 pagesTd3 Machine Asynchronehassankch100% (2)
- Hytrack HY50Document54 pagesHytrack HY50Thierry RobbePas encore d'évaluation
- Les Moteurs À Courant Continu, Synchrone Et AsynchroneDocument11 pagesLes Moteurs À Courant Continu, Synchrone Et AsynchroneHamza Nabil100% (1)
- Cour 1 Redress Ment Mono PhaseDocument39 pagesCour 1 Redress Ment Mono Phaseمفتاح الدينPas encore d'évaluation
- tp3 LoucifDocument13 pagestp3 LoucifMustapha EL Amine GHERDAINEPas encore d'évaluation
- ALTERNATEUR Explications Et DiagnosticDocument4 pagesALTERNATEUR Explications Et DiagnosticPaulo RochaPas encore d'évaluation
- G. Pinson - Physique AppliquéeDocument5 pagesG. Pinson - Physique Appliquéerached123Pas encore d'évaluation
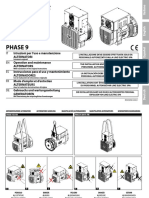
- Linz Manual Phase9 20207Document36 pagesLinz Manual Phase9 20207Jairo GarciaPas encore d'évaluation
- TP2015 ELT2 BrochureDocument25 pagesTP2015 ELT2 BrochuresakridjPas encore d'évaluation
- Machine A Courant ContinuDocument9 pagesMachine A Courant Continuycf.sahiqaPas encore d'évaluation
- Exercices Transformateur ParfaitDocument1 pageExercices Transformateur ParfaitzinebPas encore d'évaluation
- BobinagesDocument2 pagesBobinagesEricPas encore d'évaluation
- GEL456 - Travaux Dirigés N°2Document2 pagesGEL456 - Travaux Dirigés N°2EklouPas encore d'évaluation
- Modelisation Machine Asynchrone G FeldDocument10 pagesModelisation Machine Asynchrone G FeldAbdel Illah LbkPas encore d'évaluation
- Machine Synchrone 10 09 09 PDFDocument37 pagesMachine Synchrone 10 09 09 PDFbachir iboun habou iboun ibrahimPas encore d'évaluation
- Chapitre - 3 - Machine à Courant ContinuDocument31 pagesChapitre - 3 - Machine à Courant ContinuboutalibzinebPas encore d'évaluation
- Transformateur Monophasé_Exercices_Calcul Sur Le Transformateur — WikiversitéDocument25 pagesTransformateur Monophasé_Exercices_Calcul Sur Le Transformateur — Wikiversitéhenninour23Pas encore d'évaluation
- Exfin98 PDFDocument4 pagesExfin98 PDFrachida zounaibiPas encore d'évaluation
- Re ch4 p2 PDFDocument10 pagesRe ch4 p2 PDFCharaf LeoPas encore d'évaluation
- AnnexxesDocument9 pagesAnnexxesamine baatitePas encore d'évaluation
- La Différence Entre Moteur À Cage Et À Bague PDFDocument1 pageLa Différence Entre Moteur À Cage Et À Bague PDFAbderahman DaouiPas encore d'évaluation
- Chapitre - 2 - Etude Des Entrainements À Base de Machines À Courant AlternatifDocument52 pagesChapitre - 2 - Etude Des Entrainements À Base de Machines À Courant AlternatifTherence Danel TCHIMAMBOUPas encore d'évaluation
- Résumé de Cours BadriDocument9 pagesRésumé de Cours BadriKhaled AbbadPas encore d'évaluation