Vous aimerez peut-être aussi
- Les Moteurs À Courant Continu, Synchrone Et AsynchroneDocument11 pagesLes Moteurs À Courant Continu, Synchrone Et AsynchroneHamza NabilPas encore d'évaluation
- Epreuve Biskra MEApp 2021Document2 pagesEpreuve Biskra MEApp 2021angar samirPas encore d'évaluation
- RésuméDocument36 pagesRésuméBoundjick Issa100% (1)
- Annexe SG3524Document55 pagesAnnexe SG3524abfstbmsod100% (4)
- Machines SynchronesDocument4 pagesMachines SynchronesTarak BenslimanePas encore d'évaluation
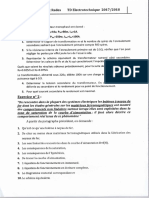
- TD 05Document4 pagesTD 05Benali SaidiPas encore d'évaluation
- Moteur A CCDocument8 pagesMoteur A CCAyoub El BadriPas encore d'évaluation
- TD Sciences Appliquees Machines SynchronDocument36 pagesTD Sciences Appliquees Machines SynchronkrommPas encore d'évaluation
- MCC Et TDDocument18 pagesMCC Et TDDame GayePas encore d'évaluation
- Electrotechnique 2 GET - Chap I - Machine A Courant ContinuDocument15 pagesElectrotechnique 2 GET - Chap I - Machine A Courant Continurajaa latifiPas encore d'évaluation
- Fiche TD 01 CorrigéDocument4 pagesFiche TD 01 CorrigéachrefPas encore d'évaluation
- TD TransformaDocument4 pagesTD TransformaTarhôùni HosnïPas encore d'évaluation
- Exo MCC de SérieDocument5 pagesExo MCC de SérieImad YazidPas encore d'évaluation
- Cours Machines Electriques 9 74Document66 pagesCours Machines Electriques 9 74Daniel reisPas encore d'évaluation
- GE - 2019-2020 Ed-Dahhak Cours Electrotechnique - S2Document38 pagesGE - 2019-2020 Ed-Dahhak Cours Electrotechnique - S2Said ZahirPas encore d'évaluation
- Machine AsynchroneDocument16 pagesMachine AsynchroneEr-Rhahmani MedPas encore d'évaluation
- Vdocuments - MX ExmsDocument5 pagesVdocuments - MX ExmsYoussouf BourabainePas encore d'évaluation
- TP N°5 Moteur À Exc Indépendante GE Inge UasDocument6 pagesTP N°5 Moteur À Exc Indépendante GE Inge Uasmongi moujahedPas encore d'évaluation
- Corrigé Du Test 1, 20 Mars 2013Document2 pagesCorrigé Du Test 1, 20 Mars 2013compte de travailPas encore d'évaluation
- Machine A Courant ContinuDocument9 pagesMachine A Courant Continuycf.sahiqaPas encore d'évaluation
- Exercices MCCDocument4 pagesExercices MCCEl Idrissi Hajar0% (1)
- G 2 Hs Compil Ext Bacv3Document6 pagesG 2 Hs Compil Ext Bacv3hassna ait aliPas encore d'évaluation
- Corrigé Des Exercices TD1Document3 pagesCorrigé Des Exercices TD1Zahir IderPas encore d'évaluation
- Machine Synchrone Cours TGMDocument6 pagesMachine Synchrone Cours TGMSaid Mamou100% (3)
- 2-Cours Machine À Courant ContinuDocument28 pages2-Cours Machine À Courant ContinuNírmo NìroPas encore d'évaluation
- TPMACHINES1 Electrotechnique 1 TPDocument49 pagesTPMACHINES1 Electrotechnique 1 TPLeghrieb RaidPas encore d'évaluation
- RedressDocument13 pagesRedressOussamaNajiPas encore d'évaluation
- Ch1 Machine A Courant ContinuDocument31 pagesCh1 Machine A Courant ContinuMessaoud Djamal LaidiPas encore d'évaluation
- Circuits MagnetiquesDocument13 pagesCircuits MagnetiquesKamel HamiPas encore d'évaluation
- TP 01Document9 pagesTP 01HAMZA ALGERIAPas encore d'évaluation
- NotesCoursAimants BM2006Document32 pagesNotesCoursAimants BM2006MoradLeglilPas encore d'évaluation
- Support Des TraDocument23 pagesSupport Des TraDJIGBORI CHARLESPas encore d'évaluation
- ZaloumaDocument99 pagesZaloumasalim batoulPas encore d'évaluation
- Exercice S Trans FoDocument1 pageExercice S Trans Fosoufiane OkPas encore d'évaluation
- TP 6 Machines Electriques 2Document7 pagesTP 6 Machines Electriques 2REZOPas encore d'évaluation
- TP 1: Commande Et Variation de Vitesse D'une Machine A Courant Continu Par Un Hacheur DévolteurDocument2 pagesTP 1: Commande Et Variation de Vitesse D'une Machine A Courant Continu Par Un Hacheur DévolteurSalah Sbm270% (1)
- Chapitre6 MCCDocument11 pagesChapitre6 MCCmaroua belhadjPas encore d'évaluation
- Page 1/14Document14 pagesPage 1/14Abdel BenPas encore d'évaluation
- E 2 TD Ms Extraits BacDocument4 pagesE 2 TD Ms Extraits BacOussamaPas encore d'évaluation
- La Mesure À Chaud Des Résistances A Donné:: UEHL El Oued 1 Année Master Commande ElectriqueDocument6 pagesLa Mesure À Chaud Des Résistances A Donné:: UEHL El Oued 1 Année Master Commande ElectriqueHamid Bendjelloul100% (1)
- TD1 Moteur CC-corrigé - InfoDocument6 pagesTD1 Moteur CC-corrigé - InfoRima AlayaPas encore d'évaluation
- Diapo 2 - Transformateur MonophaséDocument18 pagesDiapo 2 - Transformateur Monophasémarierosekamdem4Pas encore d'évaluation
- Electro 2Document2 pagesElectro 2LeavMenghuyPas encore d'évaluation
- Machine AsynchroneDocument7 pagesMachine AsynchroneFatma Borgi Ep SaadaouiPas encore d'évaluation
- Machine Asynchrone TolotraDocument11 pagesMachine Asynchrone TolotraManoaPas encore d'évaluation
- TD MCCDocument4 pagesTD MCCIsmail ElfaPas encore d'évaluation
- Correction: V CC VDocument6 pagesCorrection: V CC Vzakariae ben-akkaPas encore d'évaluation
- Re ch2 PDFDocument20 pagesRe ch2 PDFيونس سليميPas encore d'évaluation
- Moteur AsynchroneDocument4 pagesMoteur AsynchronekakaPas encore d'évaluation
- Tension Et Courant Alternatif Cours 1Document9 pagesTension Et Courant Alternatif Cours 1moudlimPas encore d'évaluation
- Fonction Convertir Actionneur Electrique Moteur A Courant Continu MCC CoursDocument3 pagesFonction Convertir Actionneur Electrique Moteur A Courant Continu MCC CoursousalhPas encore d'évaluation
- Enoncés: TD #5: Les Machines A Courant Continu A Excitation SerieDocument2 pagesEnoncés: TD #5: Les Machines A Courant Continu A Excitation SerieNabil Mekimah100% (1)
- III - Les Machines Synchrones (Fonctionnement en Moteur)Document6 pagesIII - Les Machines Synchrones (Fonctionnement en Moteur)imadPas encore d'évaluation
- Eltg MCC Partie I 15-11-2020Document59 pagesEltg MCC Partie I 15-11-2020Sarah NourPas encore d'évaluation
- CH2 Les Systèmes de Conversion de Lénergie éolienneCEDocument10 pagesCH2 Les Systèmes de Conversion de Lénergie éolienneCESalmi Nour E'ddinePas encore d'évaluation
- TD2Document2 pagesTD2Shai MaPas encore d'évaluation
- M.T 001 1 PDFDocument90 pagesM.T 001 1 PDFRom-2 BotchackPas encore d'évaluation
- TP MachineDocument13 pagesTP Machinefadig4mez96Pas encore d'évaluation
- AlternateurDocument6 pagesAlternateurmouf zerargaPas encore d'évaluation
- Element Corrigé ElectroniqeDocument5 pagesElement Corrigé ElectroniqeHamza NabilPas encore d'évaluation
- Conception D'un HacheurDocument9 pagesConception D'un HacheurHamza NabilPas encore d'évaluation
- Conception D'un HacheurDocument9 pagesConception D'un HacheurHamza NabilPas encore d'évaluation
- Convertisseur BuckDocument28 pagesConvertisseur BuckDave KrauserPas encore d'évaluation
- Cours 04 Le Rationalisme Et Les Visionnaires Du 18eme Siècle PDFDocument57 pagesCours 04 Le Rationalisme Et Les Visionnaires Du 18eme Siècle PDFBen Aribe AymenPas encore d'évaluation
- Ligne Minière Est 27 06 18 VFDocument46 pagesLigne Minière Est 27 06 18 VFAbbas EulmiPas encore d'évaluation
- AE2415ZDocument2 pagesAE2415ZAndres VargazPas encore d'évaluation
- Du Management Au Leadership Agile (Cecile Dejoux)Document128 pagesDu Management Au Leadership Agile (Cecile Dejoux)Tresor KankuPas encore d'évaluation
- Rapport de StageDocument14 pagesRapport de StagesaidPas encore d'évaluation
- Maisons Bell - Constructeur de Maisons Individuelles Haut de GammeDocument8 pagesMaisons Bell - Constructeur de Maisons Individuelles Haut de GammeDiogo FernandesPas encore d'évaluation
- E Change UrsDocument10 pagesE Change UrsDJEVOU AurelPas encore d'évaluation
- 01 - La Fonction MaintenanceDocument3 pages01 - La Fonction Maintenancebouazizi_sPas encore d'évaluation
- Pierre Teilhard Du Chardin - Le Coeur de La MatièreDocument230 pagesPierre Teilhard Du Chardin - Le Coeur de La Matièrestis73100% (1)
- Le Management Et Le Controle de Gestion PPT VFDocument34 pagesLe Management Et Le Controle de Gestion PPT VFJihane YoussoufiPas encore d'évaluation
- Livret Pédagogique EAD PHILOSOPHIE 2017-2018Document113 pagesLivret Pédagogique EAD PHILOSOPHIE 2017-2018Anonymous LOcT0gjqdSPas encore d'évaluation
- Cours D'économie de Production Niveau 5-1Document68 pagesCours D'économie de Production Niveau 5-1Leo Jospinho100% (1)
- Guide Aplus2Document138 pagesGuide Aplus2Galilea RuanoPas encore d'évaluation
- BL30 - Effecteurs MusculairesDocument32 pagesBL30 - Effecteurs MusculairesAmine El ZergPas encore d'évaluation
- 203-Article Text-754-1-10-20200802Document18 pages203-Article Text-754-1-10-20200802Ahmed MardasPas encore d'évaluation
- Calculs Façades Mills PDFDocument1 pageCalculs Façades Mills PDFRalf Lo100% (1)
- TCH 025 Ets Diagnostic Ptie 1 h08Document69 pagesTCH 025 Ets Diagnostic Ptie 1 h08Anonymous Zz5ljwwtPas encore d'évaluation
- Recristallisation Et Temperature de FusionDocument9 pagesRecristallisation Et Temperature de FusionhamoumPas encore d'évaluation
- L3 - Hydrogéologie - Cours - Chapitre 01Document21 pagesL3 - Hydrogéologie - Cours - Chapitre 01Yasmine Ouardia KARROUMPas encore d'évaluation
- Le Tourneur-Mécanicien Filetage Et Travaux Speciaux, E.sodanoDocument178 pagesLe Tourneur-Mécanicien Filetage Et Travaux Speciaux, E.sodanoaymenPas encore d'évaluation
- Facebook Mot de Passe Hack GratuitDocument2 pagesFacebook Mot de Passe Hack Gratuitlegalcategory245Pas encore d'évaluation
- Résumé de Géologie 2024Document2 pagesRésumé de Géologie 2024Kotbi MohamedPas encore d'évaluation
- 2020 Concours Centrale Supélec Physique Chimie 1 TSI Corrige 3Document5 pages2020 Concours Centrale Supélec Physique Chimie 1 TSI Corrige 3mpofPas encore d'évaluation
- Bottero, Pierre - (La Quete D'ewilan-3) L'ile Du DestinDocument265 pagesBottero, Pierre - (La Quete D'ewilan-3) L'ile Du DestinNaheuPas encore d'évaluation
- Guide 1Document16 pagesGuide 1Ktat fatmaPas encore d'évaluation
- Fondamentaux Communication D'entrepriseDocument10 pagesFondamentaux Communication D'entreprisefallPas encore d'évaluation
- Etude de Cas - Cycle de Vente ClientDocument2 pagesEtude de Cas - Cycle de Vente ClientYOUNES JOUHARI100% (2)
- IMECO CatalogueDocument31 pagesIMECO Catalogueasiyapcommercial1Pas encore d'évaluation
- CORRIGE MACRO L1 Sept 2005Document7 pagesCORRIGE MACRO L1 Sept 2005souad mhiriPas encore d'évaluation
- Aubenque Problemes AristoteliciensDocument2 pagesAubenque Problemes AristoteliciensAmwin minm0% (1)