Vous aimerez peut-être aussi
- Présentation ProcDocument26 pagesPrésentation ProcNezha BENICHOU100% (1)
- 5a.data Path - MulticycleDocument37 pages5a.data Path - MulticycleWael KhemakhemPas encore d'évaluation
- Composants Chapitre4 Partie2Document29 pagesComposants Chapitre4 Partie2Andoche MampassiPas encore d'évaluation
- Architectures ParallelesDocument25 pagesArchitectures Paralleleswilfried AGBETOPas encore d'évaluation
- Chapter_4_partie1 (1)Document43 pagesChapter_4_partie1 (1)s.kouadriPas encore d'évaluation
- Architecture Superscalaire Et PipelineDocument7 pagesArchitecture Superscalaire Et PipelineRomuald AHODEHINTOPas encore d'évaluation
- Et Sys PowadDocument6 pagesEt Sys Powadfelemag221Pas encore d'évaluation
- Chap06 1Document98 pagesChap06 1Mike OdjoPas encore d'évaluation
- Partie 7 Processus de Développement LogicielDocument17 pagesPartie 7 Processus de Développement LogicielZiad MerjanePas encore d'évaluation
- Supports PapierDocument27 pagesSupports PapierfredPas encore d'évaluation
- Chapitre5 SE1Document38 pagesChapitre5 SE1venanceharoldPas encore d'évaluation
- Chap3 SETR 22 23Document25 pagesChap3 SETR 22 23Ameni AzouzPas encore d'évaluation
- TD n3 Archi 2018-2019Document2 pagesTD n3 Archi 2018-2019Anas MaghrebiPas encore d'évaluation
- Explication VLIW Et PipelineDocument2 pagesExplication VLIW Et PipelineSalima SEGHIERPas encore d'évaluation
- Et Dev 2symdwsDocument7 pagesEt Dev 2symdwsDaouda Abdou MatiPas encore d'évaluation
- Chap X 1 H13Document8 pagesChap X 1 H13Marc NantaPas encore d'évaluation
- Et Cl DockerDocument4 pagesEt Cl DockerSayoba GansanePas encore d'évaluation
- Et CL 2azuDocument5 pagesEt CL 2azuDestinPas encore d'évaluation
- Chapitre MicroprocesseurDocument9 pagesChapitre MicroprocesseurMahdi Ben AbdallahPas encore d'évaluation
- Ordonnancement Des ProcessusDocument8 pagesOrdonnancement Des ProcessusKhaled AbdessalemPas encore d'évaluation
- Chapitre 4Document49 pagesChapitre 4Adil EL AttarPas encore d'évaluation
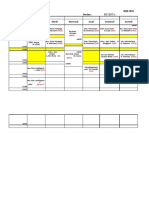
- Emploi de tempsDocument1 pageEmploi de tempsRobert MvogoPas encore d'évaluation
- Module 03 Exploitation Technique Un Parc de Vehicules TRA TSET PDFDocument103 pagesModule 03 Exploitation Technique Un Parc de Vehicules TRA TSET PDFEL HODALY Zouhair100% (1)
- M03 Exploitation Technique D Un Parc de Vehicules TRA TSET WWW - CoursDocument103 pagesM03 Exploitation Technique D Un Parc de Vehicules TRA TSET WWW - CoursHmanal HdrPas encore d'évaluation
- TD Architecture PDFDocument18 pagesTD Architecture PDFatig khaoulaPas encore d'évaluation
- Réferentiel_chef méca 3000 kW_maj20160525_GM1_0Document14 pagesRéferentiel_chef méca 3000 kW_maj20160525_GM1_0marie.rola1Pas encore d'évaluation
- 2022-08 247-637 D-0009 Pilotes Interfaces Services Et ProcessusDocument15 pages2022-08 247-637 D-0009 Pilotes Interfaces Services Et Processusdussault.sPas encore d'évaluation
- Cours Temps ReelDocument22 pagesCours Temps ReelNicolas SirtakysPas encore d'évaluation
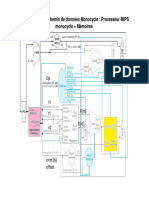
- 20XX XX - Cours.mips - AdoDocument140 pages20XX XX - Cours.mips - Adomarwabenmiloud16Pas encore d'évaluation
- Chapitre 1 Systemes EmbarquésDocument12 pagesChapitre 1 Systemes EmbarquésBrondon PagouPas encore d'évaluation
- Chapitre 2 - Mesure Des PerformancesDocument46 pagesChapitre 2 - Mesure Des PerformancesidemPas encore d'évaluation
- Chapitre 4Document14 pagesChapitre 4Dhafer MezghaniPas encore d'évaluation
- MV10G Formation Vue D Ensemble de Parallel Sysplex PDFDocument1 pageMV10G Formation Vue D Ensemble de Parallel Sysplex PDFCertyouFormationPas encore d'évaluation
- Cours RtaiDocument83 pagesCours Rtainizar samadiPas encore d'évaluation
- AFPMA - Dterminer Les Temps Par La Chrono-Analyse Et Le Jugement DallureDocument2 pagesAFPMA - Dterminer Les Temps Par La Chrono-Analyse Et Le Jugement DalluredarlannePas encore d'évaluation
- Notes Cpumem2Document66 pagesNotes Cpumem2Isaac AdangbadjaPas encore d'évaluation
- 1 - Cours SE Partie 4Document69 pages1 - Cours SE Partie 4mohamed.saidi212001Pas encore d'évaluation
- Module 14Document61 pagesModule 14Camille BleossiPas encore d'évaluation
- ORDONNANCEMMENTDocument16 pagesORDONNANCEMMENTBoris Meva'aPas encore d'évaluation
- Gestion de Processus-ConvertiDocument26 pagesGestion de Processus-ConvertiAhmed BourguibaPas encore d'évaluation
- Calcule Parallel - IntroductionDocument50 pagesCalcule Parallel - IntroductionAyoub MazaPas encore d'évaluation
- Chapitre 8 CorrigeDocument23 pagesChapitre 8 Corrigeihsen gasmiPas encore d'évaluation
- Revision SE1 1 2 3 4Document7 pagesRevision SE1 1 2 3 4Ilyes The KingPas encore d'évaluation
- SMBDocument12 pagesSMBAbderrahim Bassir100% (1)
- La Programmation Des PIC en C (Le Temp D'horloge) PDFDocument19 pagesLa Programmation Des PIC en C (Le Temp D'horloge) PDFNisou ProPas encore d'évaluation
- TD 2: Architecture Des Ordinateurs: Exercice 1Document2 pagesTD 2: Architecture Des Ordinateurs: Exercice 1ahmed fathallahPas encore d'évaluation
- Fascicule TP - Aletier de Commandes Et Supervision - La II A3Document30 pagesFascicule TP - Aletier de Commandes Et Supervision - La II A3Habib HAMDIPas encore d'évaluation
- Gestion de ProcessusDocument40 pagesGestion de ProcessusHachem ElyousfiPas encore d'évaluation
- Mi06 l2 Se1 Emd2014Document8 pagesMi06 l2 Se1 Emd2014minaPas encore d'évaluation
- Chap06 1Document82 pagesChap06 1Djebbi SamiPas encore d'évaluation
- 7 ProcesseursDocument46 pages7 ProcesseursAhmed HaddadPas encore d'évaluation
- Exploitation D'une CentraleDocument33 pagesExploitation D'une CentraleHernest Ferra100% (1)
- TD1 - 2021Document2 pagesTD1 - 2021scar lightPas encore d'évaluation
- Les BouclesDocument2 pagesLes Bouclesh2k75vbzs5Pas encore d'évaluation
- Gestion de Processus 4Document34 pagesGestion de Processus 4draou maissaPas encore d'évaluation
- CH3 OrdonnancementDocument36 pagesCH3 OrdonnancementtestPas encore d'évaluation
- CH6 OrdonnancementDocument12 pagesCH6 Ordonnancementmaha100% (1)
- 04 - Mesure Des Durées Et Mouvement - Concentrations Dans Le Diagnostic MédicalDocument13 pages04 - Mesure Des Durées Et Mouvement - Concentrations Dans Le Diagnostic MédicalnicolasgrelletPas encore d'évaluation
- PROGRAMME D ETUDES Maintenance Des Équipements de Froid Et Climatisation Code - ELE0714Document78 pagesPROGRAMME D ETUDES Maintenance Des Équipements de Froid Et Climatisation Code - ELE0714Benouna Fert100% (1)
- L' Injection électronique: Tutoriel et GuideD'EverandL' Injection électronique: Tutoriel et GuideÉvaluation : 5 sur 5 étoiles5/5 (1)
- Report Article 13Document1 pageReport Article 13mezghaniPas encore d'évaluation
- Fiche Autorisation Depot2020Document2 pagesFiche Autorisation Depot2020mezghaniPas encore d'évaluation
- Emploi MP2ERTA - 20-21Document2 pagesEmploi MP2ERTA - 20-21mezghaniPas encore d'évaluation
- PV de Réunion-2 Rania ChtiouiDocument1 pagePV de Réunion-2 Rania ChtiouimezghaniPas encore d'évaluation
- Monocycle PDFDocument1 pageMonocycle PDFmezghaniPas encore d'évaluation
- TD1 ArchitectureDocument3 pagesTD1 ArchitecturemezghaniPas encore d'évaluation
- Examen SL 4Document6 pagesExamen SL 4mezghani100% (1)
- TD2 ArchitectureDocument10 pagesTD2 ArchitecturemezghaniPas encore d'évaluation
- Cours CompletDocument69 pagesCours CompletDhafer MezghaniPas encore d'évaluation
- Liste Des SociétésDocument9 pagesListe Des SociétésmezghaniPas encore d'évaluation
- Examen SL 1Document4 pagesExamen SL 1mezghaniPas encore d'évaluation
- Examen SL 3Document2 pagesExamen SL 3mezghaniPas encore d'évaluation
- Cours 1 Architectures Des CalculateursDocument12 pagesCours 1 Architectures Des CalculateursmezghaniPas encore d'évaluation
- TD MulticycleDocument4 pagesTD MulticyclemezghaniPas encore d'évaluation
- Liste Des Sociétés 2Document12 pagesListe Des Sociétés 2mezghaniPas encore d'évaluation
- Cours 3 Architectures Des Jeux D'istruction RISCDocument10 pagesCours 3 Architectures Des Jeux D'istruction RISCmezghaniPas encore d'évaluation
- Série de Révision Méthodologie de Conception Des ProcesseursDocument6 pagesSérie de Révision Méthodologie de Conception Des ProcesseursmezghaniPas encore d'évaluation
- Cours 4 Conception Des Processeurs MonocyclesDocument7 pagesCours 4 Conception Des Processeurs MonocyclesmezghaniPas encore d'évaluation
- Cours 2 Les MémoiresDocument5 pagesCours 2 Les MémoiresmezghaniPas encore d'évaluation
- Architecture de 8086Document7 pagesArchitecture de 8086mezghaniPas encore d'évaluation
- Etude Systemes PDFDocument10 pagesEtude Systemes PDFkhocinePas encore d'évaluation
- Codes L524Document58 pagesCodes L524ameur bouaouina100% (2)
- Automate Tsx37Document23 pagesAutomate Tsx37walidjafPas encore d'évaluation
- Cours 1. Ingénierie de Câblage LANDocument42 pagesCours 1. Ingénierie de Câblage LANSarra Slouli100% (2)
- Cours LogiqueDocument6 pagesCours LogiqueMaxence KouessiPas encore d'évaluation
- SFP MultiferroDocument4 pagesSFP MultiferroAziz TAOUFYQPas encore d'évaluation
- Exposeeeee 1Document55 pagesExposeeeee 1Mohammed Mourad100% (1)
- ArduinoDocument25 pagesArduinoKazuhiro HikariPas encore d'évaluation
- Schema de Liaison A La TerreDocument53 pagesSchema de Liaison A La Terrecherif yahyaoui86% (7)
- 6 Lecon 6Document46 pages6 Lecon 6Chi RazPas encore d'évaluation
- Exercices AAV v2Document8 pagesExercices AAV v2Yassinox kamal50% (2)
- TP Convertiss Machine EP CM Soyed Ab PDFDocument70 pagesTP Convertiss Machine EP CM Soyed Ab PDFAsm MaPas encore d'évaluation
- TP 1Document2 pagesTP 1Houmita Abdelkader100% (1)
- QCM: " Electronique de Puissance ": I (Ena) I (Ena) I (Ena)Document2 pagesQCM: " Electronique de Puissance ": I (Ena) I (Ena) I (Ena)HAMDI BEN ABDALLAHPas encore d'évaluation
- Traducteur Simultane TELEVICDocument28 pagesTraducteur Simultane TELEVICLacosteur IvouchkaPas encore d'évaluation
- Composant Chapitre 03Document46 pagesComposant Chapitre 03Henri RayanPas encore d'évaluation
- Null 1Document101 pagesNull 1hadroug nadjiPas encore d'évaluation
- Cours SDRE - BENASLA - Chap 3Document15 pagesCours SDRE - BENASLA - Chap 3farid saadPas encore d'évaluation
- Mémoire 43 2016Document156 pagesMémoire 43 2016Aouatif AouatifoPas encore d'évaluation
- Partie 1: Régime Alternatif Sinusoïdal Monophasé: Exercice 1: Charge MonophaséeDocument7 pagesPartie 1: Régime Alternatif Sinusoïdal Monophasé: Exercice 1: Charge MonophaséemounaPas encore d'évaluation
- 03 Machines Asynchrones (1) 2Document14 pages03 Machines Asynchrones (1) 2Idoumou AbdoumouPas encore d'évaluation
- Guide Du Technicien en Electronique WWW Cours-Electromecanique Com Decrypted PDFDocument289 pagesGuide Du Technicien en Electronique WWW Cours-Electromecanique Com Decrypted PDFMohamed Chedly100% (1)
- I583igbdfep02 19Document2 pagesI583igbdfep02 19patrasescuPas encore d'évaluation
- Chapitre 04 Cours RSF-WLAN 2011-2012Document39 pagesChapitre 04 Cours RSF-WLAN 2011-2012Saf BesPas encore d'évaluation
- TP 0 & Diodes1-Électronique NI ELVIS II Février 2021Document10 pagesTP 0 & Diodes1-Électronique NI ELVIS II Février 2021Tarhôùni Hosnï100% (1)
- Les Différentes Topologies Physiques D'un Réseau LocalDocument8 pagesLes Différentes Topologies Physiques D'un Réseau LocalBILL GATTE100% (1)
- Cours Hygiene Et SecuritéDocument4 pagesCours Hygiene Et SecuritéLassouag ChafaaPas encore d'évaluation
- Quelques PropositionsDocument11 pagesQuelques PropositionsOuchikhPas encore d'évaluation
- Contrôle de La Maison Intelligente Par L'utilisation de L'arduino Et Via Une Application AndroidDocument123 pagesContrôle de La Maison Intelligente Par L'utilisation de L'arduino Et Via Une Application AndroidFatima Zahra Amousse100% (1)
- DualSun - FR - Fiche Technique FLASH 375 Shingle Black - V1.3Document2 pagesDualSun - FR - Fiche Technique FLASH 375 Shingle Black - V1.3logéPas encore d'évaluation