Vous aimerez peut-être aussi
- Developing Cost Estimates for Environmental Remediation ProjectsD'EverandDeveloping Cost Estimates for Environmental Remediation ProjectsPas encore d'évaluation
- PDFDocument216 pagesPDFMiraPas encore d'évaluation
- Méthodes de planification en transport: Deuxième éditionD'EverandMéthodes de planification en transport: Deuxième éditionPas encore d'évaluation
- Group ElectrogèneDocument216 pagesGroup ElectrogèneHicham AbdelrhafourPas encore d'évaluation
- Aide-mémoire de mécanique pratique: A l'usage des officiers d'artillerie et des ingénieurs civils et militairesD'EverandAide-mémoire de mécanique pratique: A l'usage des officiers d'artillerie et des ingénieurs civils et militairesPas encore d'évaluation
- Article CFM Steve NGOUFACKDocument10 pagesArticle CFM Steve NGOUFACKAbdelkader RabahPas encore d'évaluation
- Conception des systèmes - Pilotage, informations et risques: Méthode "Maze", une méthode pour sortir du labyrinthe de la complexitéD'EverandConception des systèmes - Pilotage, informations et risques: Méthode "Maze", une méthode pour sortir du labyrinthe de la complexitéPas encore d'évaluation
- Thse Rachid NOUREDDINE2008Document109 pagesThse Rachid NOUREDDINE2008King BarcarollePas encore d'évaluation
- Detection Des Defaut Dans Injection DieselDocument144 pagesDetection Des Defaut Dans Injection Dieseljeanpaul CAYTAN67% (3)
- Courchesne SamuelDocument171 pagesCourchesne SamuelSamar ghPas encore d'évaluation
- Ex4 PDFDocument134 pagesEx4 PDFAmine HajjiaPas encore d'évaluation
- 2010 LTN Ayadi Optimisation Par Algorithme Genetique de La MaintenanceDocument10 pages2010 LTN Ayadi Optimisation Par Algorithme Genetique de La MaintenanceyassinebouazziPas encore d'évaluation
- Optimisation Des Procedes de Mise en ForDocument143 pagesOptimisation Des Procedes de Mise en ForAbdelmoumen GuedriPas encore d'évaluation
- Methodologie Danalyse Et Doptimisation Des Tolerances Dans Un Contexte de Conception Integree TolanalysesDocument15 pagesMethodologie Danalyse Et Doptimisation Des Tolerances Dans Un Contexte de Conception Integree TolanalysesmloualPas encore d'évaluation
- Memoire de Projet Fin D'Etudes: Departemet Genie ElectriqueDocument12 pagesMemoire de Projet Fin D'Etudes: Departemet Genie ElectriqueHatim Bouain0% (1)
- 2014PA112311 AnnexeDocument28 pages2014PA112311 AnnexeOusama FerjeniPas encore d'évaluation
- Commande Robuste Avec Relachement Des ContraintesDocument8 pagesCommande Robuste Avec Relachement Des ContraintesPa AndriaPas encore d'évaluation
- 1 Lorexp 2021 A1090 JuvetDocument15 pages1 Lorexp 2021 A1090 Juvetpat juvPas encore d'évaluation
- HDR Clavel EdithDocument118 pagesHDR Clavel EdithTony kougbaganPas encore d'évaluation
- Ijisr 14 337 01 PDFDocument8 pagesIjisr 14 337 01 PDFimad djaghloulPas encore d'évaluation
- Ijisr 14 337 01Document8 pagesIjisr 14 337 01Maha KarrayPas encore d'évaluation
- Ungerer ApplisMolmodtooilandgasOGST2006vol61n3Document18 pagesUngerer ApplisMolmodtooilandgasOGST2006vol61n3danielmugaboPas encore d'évaluation
- Application Dun Modele Parallele de La Methode PSDocument13 pagesApplication Dun Modele Parallele de La Methode PSCharafeddine ChattiPas encore d'évaluation
- These 50376 2015 MeguettaDocument150 pagesThese 50376 2015 MeguettadocalasPas encore d'évaluation
- DJEDIDI 844gftk105ofr463mkad662zmg THDocument190 pagesDJEDIDI 844gftk105ofr463mkad662zmg THCœur AmourPas encore d'évaluation
- Thesis Description Is Available in French and English - 1Document8 pagesThesis Description Is Available in French and English - 1Hadi KenanePas encore d'évaluation
- FBr07 - Modelisation Des Taux de Defaillance en MecaniqueDocument21 pagesFBr07 - Modelisation Des Taux de Defaillance en MecaniqueOliver TwistePas encore d'évaluation
- GUIZANI 2016 DiffusionDocument161 pagesGUIZANI 2016 Diffusionfahd ghabiPas encore d'évaluation
- Fiches - Methodes AMDEC PDFDocument1 pageFiches - Methodes AMDEC PDFAhmed IdiPas encore d'évaluation
- These MerabetDocument207 pagesThese MerabetHassen BrahimPas encore d'évaluation
- Bouraoui Et Al 2017 RedDocument5 pagesBouraoui Et Al 2017 RednaghmouPas encore d'évaluation
- Diagnostic de Systemes A Evenements Discrets A BasDocument31 pagesDiagnostic de Systemes A Evenements Discrets A BasSliim AmiriPas encore d'évaluation
- These Walid 2011Document155 pagesThese Walid 2011Mohamed OmarPas encore d'évaluation
- CIGI 2015 Submission 5Document9 pagesCIGI 2015 Submission 5BN CDH SDJPas encore d'évaluation
- 2010 LTN Ayadi Optimisation Par Algorithme Genetique de La MaintenanceDocument11 pages2010 LTN Ayadi Optimisation Par Algorithme Genetique de La MaintenanceAhmed IdiPas encore d'évaluation
- Approche Virtuelle Pour La Conception Et Le Développement Des Systèmes Mécatroniques - Mise en OeuvreDocument28 pagesApproche Virtuelle Pour La Conception Et Le Développement Des Systèmes Mécatroniques - Mise en Oeuvreanonyme anonymePas encore d'évaluation
- TheseDocument193 pagesTheseAmine TalhaPas encore d'évaluation
- Kha5791 PDFDocument165 pagesKha5791 PDFKHALEDFEKAIRPas encore d'évaluation
- 2006 CLF 21677Document166 pages2006 CLF 21677gabyy7985Pas encore d'évaluation
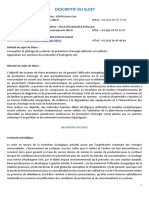
- Sujet These Cifre Cetim-ICA 2021-1Document2 pagesSujet These Cifre Cetim-ICA 2021-1larathiagoPas encore d'évaluation
- Rapport DAHERDocument90 pagesRapport DAHERJabir SamadiPas encore d'évaluation
- Approche Virtuelle Pour La Conception Et Le Développement de Systèmes Mécatroniques - MéthodologieDocument26 pagesApproche Virtuelle Pour La Conception Et Le Développement de Systèmes Mécatroniques - Méthodologieanonyme anonymePas encore d'évaluation
- 2020LARE0008 CLinKwongChonDocument209 pages2020LARE0008 CLinKwongChonimadldnPas encore d'évaluation
- Méthodologie AMDECDocument17 pagesMéthodologie AMDECMustafa Nour100% (1)
- Diagnostic Des Defauts Des Machines Asynchrones Par Reconnaissance Des FormesDocument172 pagesDiagnostic Des Defauts Des Machines Asynchrones Par Reconnaissance Des Formeskhaled3220Pas encore d'évaluation
- Deltamu - Mesures N° 761 - Le Rythme Des Étalonnages N'est Plus Réglé Comme Du Papier À MusiqueDocument8 pagesDeltamu - Mesures N° 761 - Le Rythme Des Étalonnages N'est Plus Réglé Comme Du Papier À MusiqueMamadou OuattaraPas encore d'évaluation
- CF2001 Pub00009265Document13 pagesCF2001 Pub00009265Osmanou NanaPas encore d'évaluation
- PapierGI2007 AlouiChapurlat VersionFinaleDocument12 pagesPapierGI2007 AlouiChapurlat VersionFinaleAliou SouanePas encore d'évaluation
- LM16 INERIS Florent Brissaud ElectroDocument9 pagesLM16 INERIS Florent Brissaud ElectroFadwaPas encore d'évaluation
- Modelisation Dynamique EauDocument2 pagesModelisation Dynamique EauMa RiemPas encore d'évaluation
- These RimDocument187 pagesThese RimĢârgâr SaidPas encore d'évaluation
- A Self-Learning Fault Diagnosis Strategy Based On Multi-Model Fusion - Docx FRDocument21 pagesA Self-Learning Fault Diagnosis Strategy Based On Multi-Model Fusion - Docx FRMo BaLaPas encore d'évaluation
- (PDF) AMDEC - CompressDocument17 pages(PDF) AMDEC - CompressMimouni MohamedPas encore d'évaluation
- Construction Exploitation Centrales Production Generation Energie ElectriqueDocument32 pagesConstruction Exploitation Centrales Production Generation Energie ElectriqueDM NGUYENPas encore d'évaluation
- Maitre Uqac 0862D 10350Document394 pagesMaitre Uqac 0862D 10350nonoPas encore d'évaluation
- Maintenance - Méthode AMDECDocument20 pagesMaintenance - Méthode AMDECSif Eddine Elm100% (3)
- NafemsDocument5 pagesNafemsdagbaPas encore d'évaluation
- Etude AMDEC Et Mise en Place Du Planning PDFDocument108 pagesEtude AMDEC Et Mise en Place Du Planning PDFSoufiane100% (2)
- 15 Article F TAFININE A15Document5 pages15 Article F TAFININE A15energiesrenouvelables25Pas encore d'évaluation
- Modelisation Des Defauts de Bobinage de La MachineDocument51 pagesModelisation Des Defauts de Bobinage de La MachineSarrPas encore d'évaluation
- Moteur ThermiqueDocument64 pagesMoteur ThermiqueAchraf MesnaouiPas encore d'évaluation
- Le DémarreurrDocument13 pagesLe DémarreurrAchraf Mesnaoui100% (1)
- KIPOR - Manuel Du Moteur Diesel MulticylindreDocument30 pagesKIPOR - Manuel Du Moteur Diesel MulticylindreAchraf Mesnaoui100% (1)
- Métier Et FormationDocument17 pagesMétier Et FormationAchraf MesnaouiPas encore d'évaluation
- ChargeurDocument1 pageChargeurAchraf MesnaouiPas encore d'évaluation
- AvantDocument12 pagesAvantAchraf MesnaouiPas encore d'évaluation
- Classeur 1Document2 pagesClasseur 1Achraf MesnaouiPas encore d'évaluation
- Le PointageDocument3 pagesLe PointageAchraf MesnaouiPas encore d'évaluation
- L'expert Compagnie Maritime D'assuranceDocument1 pageL'expert Compagnie Maritime D'assuranceAchraf MesnaouiPas encore d'évaluation
- DictionnnnDocument1 pageDictionnnnAchraf MesnaouiPas encore d'évaluation
- Gaillard DDocument1 pageGaillard DAchraf MesnaouiPas encore d'évaluation
- Rouleaux PACK - VRACDocument54 pagesRouleaux PACK - VRACZaarad ZakariaPas encore d'évaluation
- Le Labfab de Rennes 2012-2013: DiaporamaDocument14 pagesLe Labfab de Rennes 2012-2013: DiaporamalabfabfrPas encore d'évaluation
- Digital Signal ProcessorDocument69 pagesDigital Signal ProcessorFaresPas encore d'évaluation
- Symfony2 Un Tutoriel Pour Debuter Avec Le Framework Symfony2Document200 pagesSymfony2 Un Tutoriel Pour Debuter Avec Le Framework Symfony2Bryan Fury JimmyPas encore d'évaluation
- Sup de Cours Education Et InstructionDocument7 pagesSup de Cours Education Et InstructionRolfo FlrPas encore d'évaluation
- DT2022-18 Document Travail Grille de DensiteDocument26 pagesDT2022-18 Document Travail Grille de Densitefrederic amadonPas encore d'évaluation
- Antennes - Techniques PDFDocument47 pagesAntennes - Techniques PDFMANERERPas encore d'évaluation
- Achouri Amira NouhaDocument135 pagesAchouri Amira NouhaEmmanuel AvegnonPas encore d'évaluation
- Présentation Leader 2Document14 pagesPrésentation Leader 2Rosine PergamentPas encore d'évaluation
- SwingDocument33 pagesSwingKarim KarimPas encore d'évaluation
- Physique-du-globe-et-meteorologie-Alphonse Berget-1904 PDFDocument379 pagesPhysique-du-globe-et-meteorologie-Alphonse Berget-1904 PDFAnonymous 4MLEo9TVQPas encore d'évaluation
- Spe645 Annexe2 22-1 1063862Document20 pagesSpe645 Annexe2 22-1 1063862tpolenorPas encore d'évaluation
- Personal SkillsDocument11 pagesPersonal SkillsAgathe GrenonPas encore d'évaluation
- EB2-Epreuve1 Production de L'ecritDocument2 pagesEB2-Epreuve1 Production de L'ecritElissa Naalaband100% (1)
- RespirationDocument19 pagesRespirationarselbleez441Pas encore d'évaluation
- Cahier Des Charges Installation PV SBC 2022Document20 pagesCahier Des Charges Installation PV SBC 2022youssefPas encore d'évaluation
- Achar2Bases de Calcul de lEC3Document19 pagesAchar2Bases de Calcul de lEC3Omar OmarPas encore d'évaluation
- Theme 2 Le Vivant Sa Diversite Et Les Fonctions Qui Le Caracterisent ProgrammeDocument5 pagesTheme 2 Le Vivant Sa Diversite Et Les Fonctions Qui Le Caracterisent ProgrammeAmine AminePas encore d'évaluation
- Les Exercices de La Methode SilvaDocument11 pagesLes Exercices de La Methode Silvaعرفان باهر100% (8)
- RazafindrakotoJacquelin ESPA MAST 2017Document217 pagesRazafindrakotoJacquelin ESPA MAST 2017ABINAPas encore d'évaluation
- Schema-Cablage-Renault-4 Modeles-1964-1966Document2 pagesSchema-Cablage-Renault-4 Modeles-1964-1966John Baker Silva MoncaleanoPas encore d'évaluation
- Samuel Blaser, Marc Ducret - JazzdorDocument2 pagesSamuel Blaser, Marc Ducret - JazzdorolocesPas encore d'évaluation
- Bibliographie Stress Au Travail 2017-10-27Document15 pagesBibliographie Stress Au Travail 2017-10-27mael bikoroPas encore d'évaluation
- Echafaudages en Sécurité Montage Et Démontage: Suva, Secteur Génie Civil Et BâtimentDocument47 pagesEchafaudages en Sécurité Montage Et Démontage: Suva, Secteur Génie Civil Et BâtimentZirig ChafikPas encore d'évaluation
- 3sc ds1Document44 pages3sc ds1wala.ayhemPas encore d'évaluation
- T 7h2uw 2022 1Document1 pageT 7h2uw 2022 1MamPas encore d'évaluation
- Traité de Psychopathologie de L'adulte - Narcissisme Et Dépression by Catherine ChabertDocument440 pagesTraité de Psychopathologie de L'adulte - Narcissisme Et Dépression by Catherine ChabertFrank Eric Ciatchoua Ngoundjo100% (7)
- Epreuve E41 Bts Elec 2019 SujetDocument21 pagesEpreuve E41 Bts Elec 2019 Sujetoussama houariPas encore d'évaluation
- La Mise en Forme PFE-1Document3 pagesLa Mise en Forme PFE-1pfePas encore d'évaluation
- Organisation Fonctionnelle D'un ProduitDocument2 pagesOrganisation Fonctionnelle D'un ProduitMIMFSPas encore d'évaluation
- Secrets ancestraux d'un maître guérisseur: Un sceptique occidental, un maître oriental et les plus grands secrets de la vieD'EverandSecrets ancestraux d'un maître guérisseur: Un sceptique occidental, un maître oriental et les plus grands secrets de la vieÉvaluation : 5 sur 5 étoiles5/5 (2)
- Technologie automobile: Les Grands Articles d'UniversalisD'EverandTechnologie automobile: Les Grands Articles d'UniversalisPas encore d'évaluation
- La vie des abeilles: Prix Nobel de littératureD'EverandLa vie des abeilles: Prix Nobel de littératureÉvaluation : 4 sur 5 étoiles4/5 (41)
- 20 Véritables remèdes de nos grands-mères pour maigrir vite et enfin perdre du poidsD'Everand20 Véritables remèdes de nos grands-mères pour maigrir vite et enfin perdre du poidsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Wireshark pour les débutants : Le guide ultime du débutant pour apprendre les bases de l’analyse réseau avec Wireshark.D'EverandWireshark pour les débutants : Le guide ultime du débutant pour apprendre les bases de l’analyse réseau avec Wireshark.Pas encore d'évaluation
- Wi-Fi Hacking avec kali linux Guide étape par étape : apprenez à pénétrer les réseaux Wifi et les meilleures stratégies pour les sécuriserD'EverandWi-Fi Hacking avec kali linux Guide étape par étape : apprenez à pénétrer les réseaux Wifi et les meilleures stratégies pour les sécuriserPas encore d'évaluation
- Améliorer votre mémoire: Un Guide pour l'augmentation de la puissance du cerveau, utilisant des techniques et méthodesD'EverandAméliorer votre mémoire: Un Guide pour l'augmentation de la puissance du cerveau, utilisant des techniques et méthodesÉvaluation : 5 sur 5 étoiles5/5 (2)
- Dark Python : Apprenez à créer vos outils de hacking.D'EverandDark Python : Apprenez à créer vos outils de hacking.Évaluation : 3 sur 5 étoiles3/5 (1)
- Secrets du Marketing des Médias Sociaux 2021: Conseils et Stratégies Extrêmement Efficaces votre Facebook (Stimulez votre Engagement et Gagnez des Clients Fidèles)D'EverandSecrets du Marketing des Médias Sociaux 2021: Conseils et Stratégies Extrêmement Efficaces votre Facebook (Stimulez votre Engagement et Gagnez des Clients Fidèles)Évaluation : 4 sur 5 étoiles4/5 (2)
- Le trading en ligne facile à apprendre: Comment devenir un trader en ligne et apprendre à investir avec succèsD'EverandLe trading en ligne facile à apprendre: Comment devenir un trader en ligne et apprendre à investir avec succèsÉvaluation : 3.5 sur 5 étoiles3.5/5 (19)
- Python | Programmer pas à pas: Le guide du débutant pour une initiation simple & rapide à la programmationD'EverandPython | Programmer pas à pas: Le guide du débutant pour une initiation simple & rapide à la programmationPas encore d'évaluation
- L'analyse technique facile à apprendre: Comment construire et interpréter des graphiques d'analyse technique pour améliorer votre activité de trading en ligne.D'EverandL'analyse technique facile à apprendre: Comment construire et interpréter des graphiques d'analyse technique pour améliorer votre activité de trading en ligne.Évaluation : 3.5 sur 5 étoiles3.5/5 (6)
- Comment analyser les gens : Introduction à l’analyse du langage corporel et les types de personnalité.D'EverandComment analyser les gens : Introduction à l’analyse du langage corporel et les types de personnalité.Pas encore d'évaluation
- L'analyse fondamentale facile à apprendre: Le guide d'introduction aux techniques et stratégies d'analyse fondamentale pour anticiper les événements qui font bouger les marchésD'EverandL'analyse fondamentale facile à apprendre: Le guide d'introduction aux techniques et stratégies d'analyse fondamentale pour anticiper les événements qui font bouger les marchésÉvaluation : 3.5 sur 5 étoiles3.5/5 (4)
- Harmonisation Energétique des Lieux: Habitat et haut-lieux sacrés 2020D'EverandHarmonisation Energétique des Lieux: Habitat et haut-lieux sacrés 2020Évaluation : 2.5 sur 5 étoiles2.5/5 (3)
- Apprendre Python rapidement: Le guide du débutant pour apprendre tout ce que vous devez savoir sur Python, même si vous êtes nouveau dans la programmationD'EverandApprendre Python rapidement: Le guide du débutant pour apprendre tout ce que vous devez savoir sur Python, même si vous êtes nouveau dans la programmationPas encore d'évaluation
- Piraté: Guide Ultime De Kali Linux Et De Piratage Sans Fil Avec Des Outils De Test De SécuritéD'EverandPiraté: Guide Ultime De Kali Linux Et De Piratage Sans Fil Avec Des Outils De Test De SécuritéPas encore d'évaluation
- La communication professionnelle facile à apprendre: Le guide pratique de la communication professionnelle et des meilleures stratégies de communication d'entrepriseD'EverandLa communication professionnelle facile à apprendre: Le guide pratique de la communication professionnelle et des meilleures stratégies de communication d'entrepriseÉvaluation : 5 sur 5 étoiles5/5 (1)
- Conception & Modélisation CAO: Le guide ultime du débutantD'EverandConception & Modélisation CAO: Le guide ultime du débutantPas encore d'évaluation
- Hacking pour débutants : Le guide complet du débutant pour apprendre les bases du hacking avec Kali LinuxD'EverandHacking pour débutants : Le guide complet du débutant pour apprendre les bases du hacking avec Kali LinuxÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- Transformez votre vie: Utilisez le pouvoir créateur qui est en vous pour construire votre vie à l'image de ce que vous voulez qu'elle soitD'EverandTransformez votre vie: Utilisez le pouvoir créateur qui est en vous pour construire votre vie à l'image de ce que vous voulez qu'elle soitÉvaluation : 4 sur 5 étoiles4/5 (14)
- L'Art de la guerre: Traité de stratégie en 13 chapitres (texte intégral)D'EverandL'Art de la guerre: Traité de stratégie en 13 chapitres (texte intégral)Évaluation : 4 sur 5 étoiles4/5 (3032)
- L'Ombre à l'Univers: La structure des particules élémentaires XIIfD'EverandL'Ombre à l'Univers: La structure des particules élémentaires XIIfPas encore d'évaluation
- Explication De La Technologie Blockchain: Guide Ultime Du Débutant Au Sujet Du Portefeuille Blockchain, Mines, Bitcoin, Ripple, EthereumD'EverandExplication De La Technologie Blockchain: Guide Ultime Du Débutant Au Sujet Du Portefeuille Blockchain, Mines, Bitcoin, Ripple, EthereumPas encore d'évaluation
- WiFi Hacking : Le guide simplifié du débutant pour apprendre le hacking des réseaux WiFi avec Kali LinuxD'EverandWiFi Hacking : Le guide simplifié du débutant pour apprendre le hacking des réseaux WiFi avec Kali LinuxÉvaluation : 3 sur 5 étoiles3/5 (1)
- Semer avec succès pour rassembler avec abundance. Jardin organique et synergique: Calcul des meilleurs jours pour l'ensemencement de chaque légumeD'EverandSemer avec succès pour rassembler avec abundance. Jardin organique et synergique: Calcul des meilleurs jours pour l'ensemencement de chaque légumePas encore d'évaluation
- Guide Pour Les Débutants En Matière De Piratage Informatique: Comment Pirater Un Réseau Sans Fil, Sécurité De Base Et Test De Pénétration, Kali LinuxD'EverandGuide Pour Les Débutants En Matière De Piratage Informatique: Comment Pirater Un Réseau Sans Fil, Sécurité De Base Et Test De Pénétration, Kali LinuxÉvaluation : 1 sur 5 étoiles1/5 (1)