Vous aimerez peut-être aussi
- Policope TPDocument26 pagesPolicope TPHamza SAfouh100% (1)
- Intro Matlab PDFDocument11 pagesIntro Matlab PDFabdou ahmedPas encore d'évaluation
- MAT 2910 H24 Devoir1Document4 pagesMAT 2910 H24 Devoir1charlinicolasPas encore d'évaluation
- TP GRAPHISME Avec MatlabDocument1 pageTP GRAPHISME Avec MatlabYT BEATSPas encore d'évaluation
- Analyse NumériqueDocument2 pagesAnalyse NumériqueAlbin PuelPas encore d'évaluation
- Sujets TP MecaniqueDocument37 pagesSujets TP MecaniqueAmeni KhaledPas encore d'évaluation
- TD Methodes Numériques 2022-2023Document3 pagesTD Methodes Numériques 2022-2023Daniel KinyockPas encore d'évaluation
- TP MATLAB MATH 2LMD MathQuelquesSolutionsDocument9 pagesTP MATLAB MATH 2LMD MathQuelquesSolutionsAmal HentatiPas encore d'évaluation
- Matlab TP4Document3 pagesMatlab TP4OG Brian100% (1)
- 1 Graphisme Élémentaire Sous Matlab: Initiation Aux Projets Numériques TP1Document6 pages1 Graphisme Élémentaire Sous Matlab: Initiation Aux Projets Numériques TP1Ibrahim LewandowskiPas encore d'évaluation
- Tutoriel MatlabDocument4 pagesTutoriel Matlabllfreaky0% (1)
- TP01 2 Maths06 2013Document2 pagesTP01 2 Maths06 2013Hayet HayetPas encore d'évaluation
- TD MatlabDocument31 pagesTD MatlabSaad Chakkor100% (2)
- TP 12 Methodes Numeriques Ns444 l2 ElnDocument6 pagesTP 12 Methodes Numeriques Ns444 l2 ElnHadjaidjiPas encore d'évaluation
- TP3 Methode IntegrationDocument2 pagesTP3 Methode Integrationmahfoud1254Pas encore d'évaluation
- TP MATLAB MATH 2LMD MathDocument6 pagesTP MATLAB MATH 2LMD MathrosePas encore d'évaluation
- Corrigé TP2Document10 pagesCorrigé TP2Nowe AhmadePas encore d'évaluation
- TP2Document2 pagesTP2sohitly99Pas encore d'évaluation
- Logarithme Népérien Exercice n:1: L.S Bach-Hamba B .H. MouradDocument4 pagesLogarithme Népérien Exercice n:1: L.S Bach-Hamba B .H. Mouradmohamadysampebgo01Pas encore d'évaluation
- TP3 2018Document6 pagesTP3 2018mcbenmahdiPas encore d'évaluation
- 1 Trac e D'une Courbe Explicite y F (X) : X Linspace (-3,3,10) y Sin (X) Plot (X, Y,'b-')Document6 pages1 Trac e D'une Courbe Explicite y F (X) : X Linspace (-3,3,10) y Sin (X) Plot (X, Y,'b-')ChoupPas encore d'évaluation
- TP2Document2 pagesTP2Nowe AhmadePas encore d'évaluation
- TP de Traitement D Images. Séance 1: Premiers Contacts Avec MatlabDocument8 pagesTP de Traitement D Images. Séance 1: Premiers Contacts Avec MatlabMehdi EL ASRIPas encore d'évaluation
- Exerc DDocument19 pagesExerc DhussamPas encore d'évaluation
- TD2Document4 pagesTD2MohamadPas encore d'évaluation
- TP2 Méthode Du Point FixeDocument4 pagesTP2 Méthode Du Point FixeroffaaPas encore d'évaluation
- Devoir AN23 ENSA3Document2 pagesDevoir AN23 ENSA3Rajae HFPas encore d'évaluation
- 1bex 06 Trigo Ctr2Fr AmmariDocument1 page1bex 06 Trigo Ctr2Fr Ammarimoustapha leyePas encore d'évaluation
- Seba 2001Document2 pagesSeba 2001Sahel TvPas encore d'évaluation
- 2015 10 16 TP1Document3 pages2015 10 16 TP1othmanPas encore d'évaluation
- Examen SR 2021Document7 pagesExamen SR 2021Aziz Ben guiratPas encore d'évaluation
- Dérivation Et Etude Des FonctionsDocument4 pagesDérivation Et Etude Des Fonctionsmostafagilli01Pas encore d'évaluation
- .On Pose Pour Tout X 0,, Alors:: ZZ 3x2y1 x4k1 Y6k1 KZDocument2 pages.On Pose Pour Tout X 0,, Alors:: ZZ 3x2y1 x4k1 Y6k1 KZmed tangourPas encore d'évaluation
- TP Methode NumériqueDocument29 pagesTP Methode NumériqueJojo NadjouaPas encore d'évaluation
- TP01 Mna S4Document2 pagesTP01 Mna S4Дьявол Может ЗаплакатьPas encore d'évaluation
- 4.M.S.3 18.19 ZarzisDocument5 pages4.M.S.3 18.19 ZarzisYassine RiahiPas encore d'évaluation
- SujetDocument3 pagesSujetbenten10ten888Pas encore d'évaluation
- TP 4Document4 pagesTP 4hùng hoàngPas encore d'évaluation
- Serie D'exercice 1ere S1Document6 pagesSerie D'exercice 1ere S1Yahya Aidara80% (5)
- Bac BlancDocument2 pagesBac BlancOuedraogo Harouna100% (2)
- Exos PythonDocument4 pagesExos Pythonabdallah jarrayPas encore d'évaluation
- Bac Math 1999Document2 pagesBac Math 1999Adama MaigaPas encore d'évaluation
- Sujet Et Corrige Type Bac 2003 Serie A1 Gabon MathematiquesDocument5 pagesSujet Et Corrige Type Bac 2003 Serie A1 Gabon Mathematiquesmoulounguianne763Pas encore d'évaluation
- Serie TP Hydro Infor 1Document7 pagesSerie TP Hydro Infor 1Hammou MorsliPas encore d'évaluation
- SMP-S6-Outils Math Et Logiciels-TD2-SolutionDocument5 pagesSMP-S6-Outils Math Et Logiciels-TD2-SolutionnouhailamessaoudyPas encore d'évaluation
- Mathematiques 2: SESSION 2015 MPMA206Document8 pagesMathematiques 2: SESSION 2015 MPMA206AIMAD ESSAKHIPas encore d'évaluation
- Math CDocument4 pagesMath CKawakiPas encore d'évaluation
- TD FonctionsDocument5 pagesTD Fonctionskaka kaladze100% (1)
- Matlab TP KSPDocument6 pagesMatlab TP KSPPheakdeyPas encore d'évaluation
- TP2Document2 pagesTP2gdarkyounes84Pas encore d'évaluation
- Devoir de Controle N 03-2010-2011Mr Chortani Atef1Document3 pagesDevoir de Controle N 03-2010-2011Mr Chortani Atef1imed ouniPas encore d'évaluation
- Wa0010Document1 pageWa0010Vanol Nguemo TadoumPas encore d'évaluation
- tp1 MatlabDocument4 pagestp1 MatlabJunior NUKUNUPas encore d'évaluation
- Commandes Scilab Pour Prepas EctDocument8 pagesCommandes Scilab Pour Prepas EctKaoutar AbdoPas encore d'évaluation
- Examen Analyse 2012 GenieDocument5 pagesExamen Analyse 2012 GenieMeriem IdirPas encore d'évaluation
- TP 1-1Document3 pagesTP 1-1ammarfatimazohra6Pas encore d'évaluation
- Deuxieme Devoir F 2022-2023Document5 pagesDeuxieme Devoir F 2022-2023ezida diwePas encore d'évaluation
- CC3 v3Document2 pagesCC3 v3ogPas encore d'évaluation
- documentsEAmisMDevoirAmimath7d3 2018 PDFDocument2 pagesdocumentsEAmisMDevoirAmimath7d3 2018 PDFnodtob10Pas encore d'évaluation
- Annales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésD'EverandAnnales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- Tp1-Mathematique de L'Ingenieur: Salhi AbdellatifDocument3 pagesTp1-Mathematique de L'Ingenieur: Salhi AbdellatifsalhiPas encore d'évaluation
- Les Types D'entreprisesDocument8 pagesLes Types D'entreprisessalhiPas encore d'évaluation
- TP2 - SalhiDocument7 pagesTP2 - SalhisalhiPas encore d'évaluation
- Cycle Ingénieur / Ingénierie Aéronautique/ S5: PR Driss HarriziDocument31 pagesCycle Ingénieur / Ingénierie Aéronautique/ S5: PR Driss HarrizisalhiPas encore d'évaluation
- TP1 MatlabDocument4 pagesTP1 MatlabsalhiPas encore d'évaluation
- TD N°1: Matériaux Et Procédés de Fabrication en AéronautiqueDocument4 pagesTD N°1: Matériaux Et Procédés de Fabrication en AéronautiquesalhiPas encore d'évaluation
- Mini ProjetDocument2 pagesMini ProjetsalhiPas encore d'évaluation
- 7transformations de PhasesDocument28 pages7transformations de PhasessalhiPas encore d'évaluation
- TP1 Mi IaDocument1 pageTP1 Mi IasalhiPas encore d'évaluation
- UntitledDocument7 pagesUntitledsalhiPas encore d'évaluation
- 6diagrammes de PhasesDocument22 pages6diagrammes de PhasessalhiPas encore d'évaluation
- 5fluage DiffusionDocument17 pages5fluage DiffusionsalhiPas encore d'évaluation
- 4ténacité Fatigue Durté Usure ThermiqueDocument30 pages4ténacité Fatigue Durté Usure ThermiquesalhiPas encore d'évaluation
- 2 ElasticitéDocument11 pages2 ElasticitésalhiPas encore d'évaluation
- Crabol XXIV-3Document2 pagesCrabol XXIV-3Pham Van DuongPas encore d'évaluation
- Cours Matlab 2020Document55 pagesCours Matlab 2020soufianealjahid523Pas encore d'évaluation
- ADE - UHA 2022-2023 (Alioune-Badara-Ibn - Diene@uha - FR) - 6.6.4jDocument1 pageADE - UHA 2022-2023 (Alioune-Badara-Ibn - Diene@uha - FR) - 6.6.4jAlioune Badara Ibn Abu Talib DiènePas encore d'évaluation
- MathématiquesDocument393 pagesMathématiquesSaido Medjout100% (1)
- Controle 1 - 4 S1 PC 1bac FRDocument3 pagesControle 1 - 4 S1 PC 1bac FRbrinimed06gmail.comPas encore d'évaluation
- ParetoDocument13 pagesParetoIkram El GhazouaniPas encore d'évaluation
- Cours Probabilités (Chapitre 1 - Analyse Combinatoire)Document41 pagesCours Probabilités (Chapitre 1 - Analyse Combinatoire)Khadija Dia100% (1)
- Alimentations StatiquesDocument16 pagesAlimentations StatiquesKdr Khair-Eddine100% (1)
- Beer - Méthode de Clarinette (1891)Document60 pagesBeer - Méthode de Clarinette (1891)fabri21Pas encore d'évaluation
- Macro ImportDocument29 pagesMacro ImportKamil ChamPas encore d'évaluation
- TP 2 InstrumentationDocument6 pagesTP 2 Instrumentationrami kafiPas encore d'évaluation
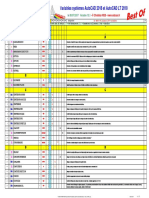
- Variables Systemes AutoCAD 2Mxx-BEST of VARIABLESDocument7 pagesVariables Systemes AutoCAD 2Mxx-BEST of VARIABLESazePas encore d'évaluation
- Ifr AttDocument9 pagesIfr AttpatrouilledeafrancePas encore d'évaluation
- Joyeux Anniversaire Tab F - Partition Et PartiesDocument2 pagesJoyeux Anniversaire Tab F - Partition Et PartiesMartinPas encore d'évaluation
- Techniques de ClimatisationDocument27 pagesTechniques de ClimatisationMohamud Lhaf100% (1)
- 0-Rappel Langage SQLDocument4 pages0-Rappel Langage SQLaminehosnyPas encore d'évaluation
- FX808394F FlexES Control FX10 (10 Boucles)Document1 pageFX808394F FlexES Control FX10 (10 Boucles)Ramdane RamdanoPas encore d'évaluation
- TD N°2 Maths 3emeDocument5 pagesTD N°2 Maths 3emebilly kanaPas encore d'évaluation
- TP E P RedresseurDocument5 pagesTP E P RedresseurRafik BouhennachePas encore d'évaluation
- Cours Systemes de Transmission de MouvementDocument5 pagesCours Systemes de Transmission de MouvementdjalikadjouPas encore d'évaluation
- Examen1+Solution Microcontrà Leurs Et Microprocesseurs - PDF  Version 1Document4 pagesExamen1+Solution Microcontrà Leurs Et Microprocesseurs - PDF  Version 1Chaima BellatPas encore d'évaluation
- Favre-Bonvin, Arpin, Brevard - 1976 - Structure de La Mycosporine (P310) PDFDocument9 pagesFavre-Bonvin, Arpin, Brevard - 1976 - Structure de La Mycosporine (P310) PDFPriscila TorresPas encore d'évaluation
- Remerciements: Kabou Saleh Eddine Pour Sa Disponibilite A' Superviser MonDocument42 pagesRemerciements: Kabou Saleh Eddine Pour Sa Disponibilite A' Superviser MonOMAE01Pas encore d'évaluation
- CCNA 02 Introduction À l'IOSDocument138 pagesCCNA 02 Introduction À l'IOSyikhlefPas encore d'évaluation
- SALOMÉ Test Management FrameworkDocument101 pagesSALOMÉ Test Management FrameworkPharell William BaldorPas encore d'évaluation
- TP BDV 2016Document17 pagesTP BDV 2016Khabtane AbdelhamidPas encore d'évaluation
- TD1 CorDocument9 pagesTD1 Coramine jodar100% (1)
- Matematica În Egipul Antic FR 3Document3 pagesMatematica În Egipul Antic FR 3Valeriu TurcanuPas encore d'évaluation
- LC 22-001Document7 pagesLC 22-001Simon Houde100% (2)
- MEMOIRE Samer MoussaDocument94 pagesMEMOIRE Samer Moussatoni JabbourPas encore d'évaluation