Vous aimerez peut-être aussi
- Examen VHDL 2018-19Document2 pagesExamen VHDL 2018-19elhaoudar.nassimaPas encore d'évaluation
- Examen VHDL +correction 1ere Session 2008Document5 pagesExamen VHDL +correction 1ere Session 2008Med0% (1)
- Examen VHDL +correction 1ere Session 2008Document5 pagesExamen VHDL +correction 1ere Session 2008Înēs Kbl100% (1)
- Examen VHDL Correction 1ere Session 2008Document5 pagesExamen VHDL Correction 1ere Session 2008Ilyas khadrouniPas encore d'évaluation
- Examen VHDL +correction 1ere Session 2008Document5 pagesExamen VHDL +correction 1ere Session 2008nesrine ninaPas encore d'évaluation
- Rapport TPDocument13 pagesRapport TPRaja EL WAARABIPas encore d'évaluation
- Serie TD4 BisDocument7 pagesSerie TD4 BisSarah NourPas encore d'évaluation
- TD N3 VHDLDocument20 pagesTD N3 VHDLHanane AIT SAIDPas encore d'évaluation
- Compte Rendu VHDLDocument16 pagesCompte Rendu VHDLMoussa ESSANHAJIPas encore d'évaluation
- VhdlexDocument10 pagesVhdlexSoukaina NJPas encore d'évaluation
- TD Fpga Cs 2015Document5 pagesTD Fpga Cs 2015hakim100% (1)
- Corigé Type Eln.-num.-Av.-fpgAVHDL M1-InST Électronique NumériqueDocument5 pagesCorigé Type Eln.-num.-Av.-fpgAVHDL M1-InST Électronique Numériques24Pas encore d'évaluation
- Corigé Type Eln.-num.-Av.-fpgAVHDL M1-InST Électronique NumériqueDocument5 pagesCorigé Type Eln.-num.-Av.-fpgAVHDL M1-InST Électronique NumériqueHala SaimPas encore d'évaluation
- Examen VHDLDocument5 pagesExamen VHDLabdellatif.haritPas encore d'évaluation
- TP Integration Num FPGA V1.7Document22 pagesTP Integration Num FPGA V1.7Ouma ImaaPas encore d'évaluation
- MSCL Cours 6 - 2&3Document25 pagesMSCL Cours 6 - 2&3Sarah NourPas encore d'évaluation
- Rapport Examples VHDLDocument30 pagesRapport Examples VHDLYacinePas encore d'évaluation
- Cours VHDL 2Document45 pagesCours VHDL 2Zine Elabidine MoslihPas encore d'évaluation
- Devoir 1 VHDLDocument9 pagesDevoir 1 VHDLSimi NePas encore d'évaluation
- Devoir VHDL 2Document34 pagesDevoir VHDL 2Simi NePas encore d'évaluation
- TD 4Document4 pagesTD 4Mohammed BabaPas encore d'évaluation
- OUBARDAN Marouane TP2 LP ESE PDFDocument8 pagesOUBARDAN Marouane TP2 LP ESE PDFMarwan OubardanPas encore d'évaluation
- VHDLDocument45 pagesVHDLAmineMohamed100% (1)
- Serie TD5Document9 pagesSerie TD5Sarah NourPas encore d'évaluation
- Serie TD1Document5 pagesSerie TD1Sarah NourPas encore d'évaluation
- VHDL - SBIHIDocument19 pagesVHDL - SBIHIaminefoura6Pas encore d'évaluation
- Verilog PDFDocument26 pagesVerilog PDFbois_olivierPas encore d'évaluation
- Exercice Chrongramme VHDLDocument2 pagesExercice Chrongramme VHDLSALMA GHAMALIPas encore d'évaluation
- Serie TD2Document6 pagesSerie TD2Sarah NourPas encore d'évaluation
- Le Langage VHDL ELKARIDocument112 pagesLe Langage VHDL ELKARIAhmed DoghmiPas encore d'évaluation
- Cours 2 VHDLDocument30 pagesCours 2 VHDLAMEL REBBOUCHEPas encore d'évaluation
- TP FreeRTOS OULAASRI LASRIDocument23 pagesTP FreeRTOS OULAASRI LASRIYassine OULAASRIPas encore d'évaluation
- Chap5 VHDL UnlockedDocument21 pagesChap5 VHDL UnlockedilyPas encore d'évaluation
- Projet ChenillardDocument12 pagesProjet ChenillardYuba Mis n'Arrif100% (1)
- Exam 2018solDocument8 pagesExam 2018solMohammed Chamseddine KadriPas encore d'évaluation
- TP3 FpgaDocument11 pagesTP3 FpgaSmart ClassePas encore d'évaluation
- AYAT Nabil SE DevoirDocument4 pagesAYAT Nabil SE DevoirayatPas encore d'évaluation
- Solution - TD 02 FPGADocument5 pagesSolution - TD 02 FPGAOubaida21 SnackPas encore d'évaluation
- VHDL Exercices Du CoursDocument16 pagesVHDL Exercices Du CoursNourallah Aouina57% (14)
- Le Langage VHDL A.elkari PDFDocument122 pagesLe Langage VHDL A.elkari PDFAhmed DoghmiPas encore d'évaluation
- TD 2021Document4 pagesTD 2021elhaoudar.nassima100% (1)
- TD 02 FpgaDocument4 pagesTD 02 FpgaOubaida21 SnackPas encore d'évaluation
- tp1 Additionneur-Soustracteur CompletDocument10 pagestp1 Additionneur-Soustracteur Completapi-272374810Pas encore d'évaluation
- Electronique Numérique Avancée: FPGA + VHDL: Donner Le Schéma Du Circuit Dont La Description VHDL Est La SuivanteDocument3 pagesElectronique Numérique Avancée: FPGA + VHDL: Donner Le Schéma Du Circuit Dont La Description VHDL Est La SuivanteBoudour BarkiaPas encore d'évaluation
- Initiation Au Langage VerilogDocument26 pagesInitiation Au Langage VerilogFouzia AddalPas encore d'évaluation
- Licence SRT VHDLDocument38 pagesLicence SRT VHDLsanokho ndiayePas encore d'évaluation
- tp6 VHDLDocument7 pagestp6 VHDLabdousewager8080Pas encore d'évaluation
- VHDL TP 0506Document5 pagesVHDL TP 0506Haythem ChaouedPas encore d'évaluation
- TD2 CorrigeDocument7 pagesTD2 CorrigeSalahItqiqPas encore d'évaluation
- TD2 CseDocument4 pagesTD2 CsemehdiPas encore d'évaluation
- TP5 - Circuits Logiques Programmables CPLDDocument8 pagesTP5 - Circuits Logiques Programmables CPLDeya arfaouiPas encore d'évaluation
- TD3 VHDL Compteurs Et RegistresDocument12 pagesTD3 VHDL Compteurs Et RegistresKais Bahrouni100% (1)
- Examen VHDL 2eme Session 2008 Mondir PDFDocument20 pagesExamen VHDL 2eme Session 2008 Mondir PDFIman El Hilah100% (1)
- CR 7 Test Bench Banc de TestDocument29 pagesCR 7 Test Bench Banc de TestBelkhiri MohammedPas encore d'évaluation
- Rapport Projet AMOUSSE-IHAM-1Document14 pagesRapport Projet AMOUSSE-IHAM-1ackfatiPas encore d'évaluation
- Exercices VHDLDocument3 pagesExercices VHDLKamel Sahraoui100% (1)
- Le Langage VHDLDocument112 pagesLe Langage VHDLMustapha Bezioui100% (1)
- Que - Yves Granjon (DUNOD)Document414 pagesQue - Yves Granjon (DUNOD)Bilal El-Sayed Ali80% (5)
- Be Kri HamidaDocument101 pagesBe Kri HamidaZenache AhlemPas encore d'évaluation
- Astable AopDocument14 pagesAstable AopZenache AhlemPas encore d'évaluation
- Mokhbi KenzaDocument98 pagesMokhbi KenzaZenache AhlemPas encore d'évaluation
- Pic 16F84 PDFDocument21 pagesPic 16F84 PDFAhmed JanatiPas encore d'évaluation
- 03 Manipulation Des Données Sous MS ExcelDocument34 pages03 Manipulation Des Données Sous MS ExcelViperDi ABPas encore d'évaluation
- 6.2.4.4 Packet Tracer - Configuring IPv6 Static and Default Routes InstructionsDocument3 pages6.2.4.4 Packet Tracer - Configuring IPv6 Static and Default Routes InstructionsAbdel GansonrePas encore d'évaluation
- Ingenierie Inverse Du Code Executable ELF Dans L Analyse Apres IntrusionDocument2 pagesIngenierie Inverse Du Code Executable ELF Dans L Analyse Apres IntrusionMouhamed Rassoul GueyePas encore d'évaluation
- Presentation de L'expose Orale de Compte Rendu Du Stage HaitamDocument23 pagesPresentation de L'expose Orale de Compte Rendu Du Stage Haitamwabouzzine007Pas encore d'évaluation
- CI11 4 1 TP Bureauadistance - EleveDocument8 pagesCI11 4 1 TP Bureauadistance - ElevePhilippeTavernierPas encore d'évaluation
- Master PRISME Produits de L'information Spécialisée Et Médiation ÉlectroniqueDocument6 pagesMaster PRISME Produits de L'information Spécialisée Et Médiation Électroniqueufr IDISTPas encore d'évaluation
- Scicos ModelicaDocument41 pagesScicos ModelicaFARHATPas encore d'évaluation
- Fonctions Langage C PDFDocument21 pagesFonctions Langage C PDFsoufyane el ouahabiPas encore d'évaluation
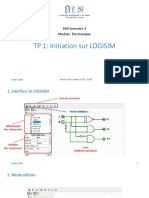
- TP 1: Initiation Sur LOGISIM: SMI Semestre 3 Module: ElectroniqueDocument26 pagesTP 1: Initiation Sur LOGISIM: SMI Semestre 3 Module: ElectroniqueABDERRAHMANE DERMOUNPas encore d'évaluation
- Bellout Mohamed Mehdi: Profil EducationDocument1 pageBellout Mohamed Mehdi: Profil EducationMohamed Mehdi BelloutPas encore d'évaluation
- Cours 7 Exploitation ITDocument46 pagesCours 7 Exploitation ITUrban BeugPas encore d'évaluation
- UE Cybersecurite-TP DVWA v0.6Document58 pagesUE Cybersecurite-TP DVWA v0.6Pape Mignane FayePas encore d'évaluation
- Cours2 Les Composants de SQL ServerDocument8 pagesCours2 Les Composants de SQL ServerAmel ourahmounePas encore d'évaluation
- Lecture UML-CodeDocument86 pagesLecture UML-CodePaulin MBPas encore d'évaluation
- Logiciel de Gestion CommercialDocument103 pagesLogiciel de Gestion CommercialAbdellatif ZbitPas encore d'évaluation
- Le OSDocument14 pagesLe OSjeancy toungouPas encore d'évaluation
- Pfe 2Document56 pagesPfe 2Dali KhPas encore d'évaluation
- Rapport TP Active DirectoryDocument17 pagesRapport TP Active DirectoryISSOUFOUPas encore d'évaluation
- Chiii Système ScadaDocument26 pagesChiii Système Scadahit masterPas encore d'évaluation
- Cours 6Document6 pagesCours 6Ahmed Salem Abdel VettahPas encore d'évaluation
- Devoir de Contrôle N°1 - Informatique - 3ème Mathématiques (2012-2013) MR Layouni KaisDocument3 pagesDevoir de Contrôle N°1 - Informatique - 3ème Mathématiques (2012-2013) MR Layouni KaisNour Ayedi100% (2)
- gtr1 - 15 09 2023Document1 pagegtr1 - 15 09 2023ayaPas encore d'évaluation
- Échantillonnage Et Reconstruction D'un Signal PériodiqueDocument13 pagesÉchantillonnage Et Reconstruction D'un Signal PériodiqueRomaysa jijiPas encore d'évaluation
- Fiche Suivi Activités StagiaireDocument2 pagesFiche Suivi Activités StagiaireRaisa AmagniaPas encore d'évaluation
- Informatique de GestionDocument19 pagesInformatique de GestionYassine2510100% (1)
- Notice D'utilisation: Commande Sigma Control 2Document248 pagesNotice D'utilisation: Commande Sigma Control 2GqueudevertPas encore d'évaluation
- MedaliDocument1 pageMedaliJlizi DaliPas encore d'évaluation
- Support Cours J2EEDocument75 pagesSupport Cours J2EETimothé RequistonPas encore d'évaluation
- Production de Documents Na9laDocument1 pageProduction de Documents Na9laSimo Es100% (1)