Vous aimerez peut-être aussi
- Commençons Les Réseaux de Neurone Avec MatlabDocument18 pagesCommençons Les Réseaux de Neurone Avec MatlabgargourgargourPas encore d'évaluation
- Reseaux de Neurones: PerceptronDocument20 pagesReseaux de Neurones: PerceptronAnovar_ebooks100% (1)
- Cours Systemes Micro-Programmes Parti1Document43 pagesCours Systemes Micro-Programmes Parti1alkassoum100% (3)
- Modélisation D'une Machine Asynchrone Par Réseau de NeuroneDocument29 pagesModélisation D'une Machine Asynchrone Par Réseau de NeuroneHachemi Bhe80% (10)
- Identification Par Sequences Binaires PseudoDocument27 pagesIdentification Par Sequences Binaires PseudozinebPas encore d'évaluation
- RN Sous MatlabDocument24 pagesRN Sous MatlabKara Reda80% (5)
- Les Reseaux de NeuronesDocument22 pagesLes Reseaux de Neuronesariel100% (1)
- Logique Floue Applic PDFDocument11 pagesLogique Floue Applic PDFDhikrane NafaaPas encore d'évaluation
- Chap 1-2 Systemes Non LineairesDocument47 pagesChap 1-2 Systemes Non LineairesLiza Linda DakarPas encore d'évaluation
- Reseau de NeuroneDocument46 pagesReseau de Neuronealirachid100% (5)
- Intel 8086Document53 pagesIntel 8086maatoufi1667% (3)
- Les Réseaux de Neurones - Présentation Et Applications Par Pierre Borne-Mohamed Benrejeb-Joseph HaggègeDocument35 pagesLes Réseaux de Neurones - Présentation Et Applications Par Pierre Borne-Mohamed Benrejeb-Joseph Haggègejohn_cooper20100% (11)
- Realisation Et Commande D'un Pendule Inversé Par Logique FloueDocument37 pagesRealisation Et Commande D'un Pendule Inversé Par Logique Floueهشام درياس67% (6)
- TP Regulation FloueDocument4 pagesTP Regulation Flouehaninsportif100% (1)
- Cours IdentificationDocument40 pagesCours IdentificationdadddPas encore d'évaluation
- Labo Logique FloueDocument5 pagesLabo Logique FloueAna ElWedherfi100% (2)
- Chapitre 01Document38 pagesChapitre 01bobzooPas encore d'évaluation
- 2020 2021 Représentation D'état Chapitre 3Document25 pages2020 2021 Représentation D'état Chapitre 3Mounaim MatiniPas encore d'évaluation
- Commande LQRDocument9 pagesCommande LQRIslem DZPas encore d'évaluation
- Cours SNL KhebliDocument24 pagesCours SNL KhebliLãrbi FãtmãPas encore d'évaluation
- Logique Floue PDFDocument13 pagesLogique Floue PDFSofiene GuedriPas encore d'évaluation
- Introduction Aux Algorithmes GénétiquesDocument23 pagesIntroduction Aux Algorithmes Génétiquescome 10100% (1)
- TD1-2-3 Avec SolutionsDocument8 pagesTD1-2-3 Avec SolutionsAmin KechPas encore d'évaluation
- Systèmes Non LinéairesDocument180 pagesSystèmes Non LinéairesMohamed Hamizic100% (3)
- Réseaux de Neurones Artificiels By: Abdelouahid ELYAHYAOUIDocument35 pagesRéseaux de Neurones Artificiels By: Abdelouahid ELYAHYAOUIRachid ZinePas encore d'évaluation
- Automatique Des SystèmesDocument85 pagesAutomatique Des Systèmesأمير العرب67% (3)
- Rapport Mécatronique Mini ProjetDocument9 pagesRapport Mécatronique Mini ProjetAyoub Bahtat0% (1)
- Introduction Aux Reseaux de NeuronesDocument31 pagesIntroduction Aux Reseaux de NeuronesIbrahim RanaoPas encore d'évaluation
- TPsIntelligenceArtificielleISIMa2011 PDFDocument57 pagesTPsIntelligenceArtificielleISIMa2011 PDFmedPas encore d'évaluation
- Espace Etat CommandeDocument35 pagesEspace Etat CommandeSeddik MehenniPas encore d'évaluation
- Cours RobotiqueDocument82 pagesCours RobotiqueWided Maghraoui100% (1)
- Ebook Matlab: Interfaces GraphiquesDocument21 pagesEbook Matlab: Interfaces GraphiquesN.NASRI Matlablog83% (6)
- Applications de La Logique FloueDocument3 pagesApplications de La Logique FloueAlain JobsPas encore d'évaluation
- Cours Asservissement MPDocument56 pagesCours Asservissement MPArbaoui Mohamed86% (7)
- TP 1 RégulationDocument7 pagesTP 1 RégulationNa Dir SayahPas encore d'évaluation
- Automatique Avancée Commande Non-Linéaire P1: Pré-Requis Et ObjectifsDocument24 pagesAutomatique Avancée Commande Non-Linéaire P1: Pré-Requis Et ObjectifsMbaira LeilaPas encore d'évaluation
- Identification 2Document30 pagesIdentification 2ssssPas encore d'évaluation
- TD2 BENKACEM Correction PDFDocument7 pagesTD2 BENKACEM Correction PDFهجار العاقلPas encore d'évaluation
- Cours Commande Par Mode GlissantDocument7 pagesCours Commande Par Mode GlissantAmine Haddad75% (4)
- TP RCP208 PMC RegressionDocument9 pagesTP RCP208 PMC RegressionDaly ZeddiniPas encore d'évaluation
- C'est Quoi Le CNNDocument20 pagesC'est Quoi Le CNNManuelPas encore d'évaluation
- QseDocument14 pagesQseAymen LahmaidiPas encore d'évaluation
- Le Perceptron Multicouche Back PropagationDocument17 pagesLe Perceptron Multicouche Back PropagationFatima AbdiPas encore d'évaluation
- Architecture Du ModèlesDocument10 pagesArchitecture Du ModèlesLandry Rakotonirina AaronPas encore d'évaluation
- Initiation MatlabDocument17 pagesInitiation MatlabSabri AbidiPas encore d'évaluation
- Réseau Neuronal Recurrent "Recurrent Neural Network" (RNN)Document9 pagesRéseau Neuronal Recurrent "Recurrent Neural Network" (RNN)kasmi zoubeirPas encore d'évaluation
- Abaqus Ma PDFDocument28 pagesAbaqus Ma PDFheniPas encore d'évaluation
- Les Structures Itératives Chapitre 4Document28 pagesLes Structures Itératives Chapitre 4wafa.prof.kalaaPas encore d'évaluation
- Matlab Fip1aDocument7 pagesMatlab Fip1aluxisi10Pas encore d'évaluation
- Chapitre 4.2Document15 pagesChapitre 4.2Med Tiouale100% (1)
- TP Els-Ode-09Document3 pagesTP Els-Ode-09imanrossPas encore d'évaluation
- TP Enregistement Numerique Version PythonDocument6 pagesTP Enregistement Numerique Version PythonLalie LANUSSE-CAZALEPas encore d'évaluation
- Mna TP1Document2 pagesMna TP1Derrouch AbderrahmanePas encore d'évaluation
- I3 Algorithmique Parallele 1Document12 pagesI3 Algorithmique Parallele 1amazoz abdouPas encore d'évaluation
- PL 22Document4 pagesPL 22Najoua RaguaniPas encore d'évaluation
- TPautomatique TIMQ2018Document16 pagesTPautomatique TIMQ2018fatima azalmadPas encore d'évaluation
- Travaux Pratiques. - G EN Erateurs Al EatoiresDocument52 pagesTravaux Pratiques. - G EN Erateurs Al EatoiresAdrien MERLEPas encore d'évaluation
- Perceptron Multicouche RicheDocument7 pagesPerceptron Multicouche RicheBilou Mender100% (1)
- Trucs de Grand MereDocument32 pagesTrucs de Grand MereSoukaina Amine100% (1)
- Trucs de Grand MereDocument32 pagesTrucs de Grand MereSoukaina Amine100% (1)
- Chap 1Document21 pagesChap 1imenessPas encore d'évaluation
- Ch1: Introduction Aux Systemes EmbarquesDocument10 pagesCh1: Introduction Aux Systemes Embarquesimeness100% (1)
- Méthodes de Recherche ScientifiqueDocument108 pagesMéthodes de Recherche ScientifiqueimenessPas encore d'évaluation
- VHDL CoursDocument111 pagesVHDL Coursimeness100% (2)
- TP Circuits LogiquesDocument3 pagesTP Circuits LogiquesimenessPas encore d'évaluation
- La Diode de PuissanceDocument32 pagesLa Diode de PuissanceimenessPas encore d'évaluation
- Résistances Et PotentiomètresDocument3 pagesRésistances Et PotentiomètresimenessPas encore d'évaluation
- Règles de Câblage Pour ArmoiresDocument3 pagesRègles de Câblage Pour ArmoiresmohakvayliPas encore d'évaluation
- Lois ElectriquesDocument20 pagesLois Electriquesimeness100% (1)
- Rapport TP VHDLDocument16 pagesRapport TP VHDLimeness100% (1)
- 2 QuadratureDocument18 pages2 QuadratureEya MastourPas encore d'évaluation
- Econome TDDocument6 pagesEconome TDDaghmoumi OutmanePas encore d'évaluation
- Cours D'initiation À L'algorithmiqueDocument33 pagesCours D'initiation À L'algorithmiquedelta centaurePas encore d'évaluation
- Ecole Centrale de Lyon: MOD - Traitement Et Analyse Des Données Visuelles Et SonoresDocument9 pagesEcole Centrale de Lyon: MOD - Traitement Et Analyse Des Données Visuelles Et Sonoresissam hach63Pas encore d'évaluation
- Cours6 IUP2Document10 pagesCours6 IUP2Zied OmarPas encore d'évaluation
- TD Optinum DauphineDocument14 pagesTD Optinum DauphineBrahim AzeffounPas encore d'évaluation
- PhynumDocument135 pagesPhynum161637004742Pas encore d'évaluation
- CM1Document145 pagesCM1Boutaina BettyPas encore d'évaluation
- Chap2 Processus Stochastique - 17 - 18Document36 pagesChap2 Processus Stochastique - 17 - 18farah chourouPas encore d'évaluation
- Tp2 CommandeDocument21 pagesTp2 CommandeBilal valontinoPas encore d'évaluation
- Rayene 2Document5 pagesRayene 2raoufPas encore d'évaluation
- Modprev Chrono FSur 1Document8 pagesModprev Chrono FSur 1Elkired YoussefPas encore d'évaluation
- Examen&Corrigé EF 2021 22Document7 pagesExamen&Corrigé EF 2021 22malek.saoudiPas encore d'évaluation
- Exo14 Corigé PDFDocument2 pagesExo14 Corigé PDFYoussef EL MliliPas encore d'évaluation
- TDsO Interpolation Polynomiale 2020-03-18 PDFDocument2 pagesTDsO Interpolation Polynomiale 2020-03-18 PDFSimo StitPas encore d'évaluation
- 102 DMS B2 EF3 Rey PDFDocument54 pages102 DMS B2 EF3 Rey PDFSamir2020Pas encore d'évaluation
- Chapitre 1 Avec Exemples D'applicationsDocument10 pagesChapitre 1 Avec Exemples D'applicationsMohammed ALMUSHIAAPas encore d'évaluation
- TP2MISEDocument1 pageTP2MISEBenrabah IkhlasPas encore d'évaluation
- PR Eambule: Lois Gamma Et Beta.: A A1 BX R - 0 A1 XDocument3 pagesPR Eambule: Lois Gamma Et Beta.: A A1 BX R - 0 A1 XOmar DiagnePas encore d'évaluation
- Rapport Asservissement KOBEWO KCHDocument71 pagesRapport Asservissement KOBEWO KCHtonye joelPas encore d'évaluation
- Exercices Corrigés Sur Les Chaines de CaractèresDocument4 pagesExercices Corrigés Sur Les Chaines de CaractèresCHOUKRI EL OUASTANI100% (1)
- DS1 PDFDocument2 pagesDS1 PDFagbodjanPas encore d'évaluation
- Chapitre 3Document9 pagesChapitre 3Joslain GuedenonPas encore d'évaluation
- TD 3 ArbreDocument4 pagesTD 3 ArbreOumaimaPas encore d'évaluation
- Fiche TD - L2-SEG-UNS-vridiDocument2 pagesFiche TD - L2-SEG-UNS-vridiSamuel axel Koffi assanhouPas encore d'évaluation
- Compte - Rendu - OptimDocument4 pagesCompte - Rendu - OptimHocinePas encore d'évaluation
- TD Ro 04 1920Document3 pagesTD Ro 04 1920belfathiPas encore d'évaluation
- Chapitre 01 PresentationDocument29 pagesChapitre 01 Presentationmohanned.abbasPas encore d'évaluation
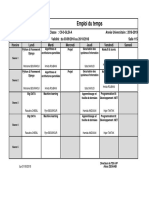
- Emploi Du Temps 2018 2019 S1 P1 CII 3 GLSI A - 2Document1 pageEmploi Du Temps 2018 2019 S1 P1 CII 3 GLSI A - 2Ahmed Amine ChakrounPas encore d'évaluation