Vous aimerez peut-être aussi
- Exercices d'intégrales et d'équations intégro-différentiellesD'EverandExercices d'intégrales et d'équations intégro-différentiellesPas encore d'évaluation
- Exercices d'intégrales de lignes, de surfaces et de volumesD'EverandExercices d'intégrales de lignes, de surfaces et de volumesPas encore d'évaluation
- Chapitre 2Document20 pagesChapitre 2Nicoleta CazacuPas encore d'évaluation
- Cours311 1Document7 pagesCours311 1Ahmed Khalil LekouchPas encore d'évaluation
- L Espace de BanachDocument38 pagesL Espace de BanachaminePas encore d'évaluation
- TD InterpolationDocument2 pagesTD InterpolationABDERRAHMANE JAFPas encore d'évaluation
- Chapitre 2Document21 pagesChapitre 2ahamadouibt4Pas encore d'évaluation
- S2VFDocument4 pagesS2VFAYMANE JAMALPas encore d'évaluation
- Chapitre 1 Espace Métrique Espace TopologiqueDocument26 pagesChapitre 1 Espace Métrique Espace TopologiqueRojo VoavyPas encore d'évaluation
- TD1 Topologies Et Espaces Métriques CORRIGE 2Document16 pagesTD1 Topologies Et Espaces Métriques CORRIGE 2Fabrice LucetPas encore d'évaluation
- Colles1213 EnoncesDocument67 pagesColles1213 EnoncesHamid ElhaouziPas encore d'évaluation
- Evn 1Document75 pagesEvn 1Walid El Bahar100% (1)
- CH 1 Householder Schur SVD ApplicationDocument42 pagesCH 1 Householder Schur SVD ApplicationYounessAR100% (1)
- Planches D'oraux: Oraux de Mines-PontsDocument6 pagesPlanches D'oraux: Oraux de Mines-PontsSamia Karroumi100% (1)
- Cours Mesure IntegrationDocument256 pagesCours Mesure IntegrationLet us DancePas encore d'évaluation
- M1 Analyse Fonctionnelle Arada - NADIRDocument42 pagesM1 Analyse Fonctionnelle Arada - NADIRALFA -SILVERNIMOPas encore d'évaluation
- TopologieDocument13 pagesTopologieChadi Chahid100% (1)
- Chap 1-2-3Document34 pagesChap 1-2-3Dosh AllouPas encore d'évaluation
- Methode Du Gradient Conjugue-1Document3 pagesMethode Du Gradient Conjugue-1Abdou FadhulPas encore d'évaluation
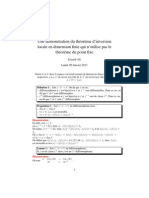
- Théorème D'inversion LocaleDocument6 pagesThéorème D'inversion LocaleessaidialiPas encore d'évaluation
- 1 Fonctions HolomorphesDocument6 pages1 Fonctions HolomorphesIbrahimRouabahPas encore d'évaluation
- Partie03 Méthode de NewtonDocument25 pagesPartie03 Méthode de Newtonslo100% (1)
- CH JordanDocument22 pagesCH Jordandaniel moneyPas encore d'évaluation
- TD 12020Document3 pagesTD 12020YOUSSEF AIT TIZIPas encore d'évaluation
- Fic 00003Document6 pagesFic 00003kingofdarkness2010Pas encore d'évaluation
- Cours Evn Topologie 2023Document21 pagesCours Evn Topologie 2023Younes EL BAHRAOUIPas encore d'évaluation
- Cours Algebre 4 PDFDocument21 pagesCours Algebre 4 PDFechafaiPas encore d'évaluation
- Fonctions Plusieurs Variables PresentationDocument73 pagesFonctions Plusieurs Variables Presentationyassin zelmatPas encore d'évaluation
- TD de TopologieDocument3 pagesTD de TopologieAmadou GarbaPas encore d'évaluation
- Series Numeriques PDFDocument22 pagesSeries Numeriques PDFgazzamnounouPas encore d'évaluation
- 00 2018-Handout-Fonctions mesurables-SMA5Document15 pages00 2018-Handout-Fonctions mesurables-SMA5abdelbarrPas encore d'évaluation
- Calcul DifférentielDocument12 pagesCalcul DifférentielMaxwellPas encore d'évaluation
- Topologie PDFDocument35 pagesTopologie PDFAnas ChenchanaPas encore d'évaluation
- Eléments de Topologie Par A. MAKKI NACIRI PDFDocument56 pagesEléments de Topologie Par A. MAKKI NACIRI PDFNabil Ait BrahimPas encore d'évaluation
- Complément TopoDocument21 pagesComplément TopoAbdellah MarzougPas encore d'évaluation
- Exercices - Developpements Limites 21Document2 pagesExercices - Developpements Limites 21SCRIBD CONTACTPas encore d'évaluation
- td2 Cor PDFDocument8 pagestd2 Cor PDFbiskra mathPas encore d'évaluation
- Cours Variables Aleatoires DiscretesDocument6 pagesCours Variables Aleatoires DiscretesProost N'guessanPas encore d'évaluation
- DualcorDocument5 pagesDualcorÇa M'excite Le TopPas encore d'évaluation
- Fonction ContinueDocument19 pagesFonction ContinueadnanePas encore d'évaluation
- Corrige 19 Tele 1Document2 pagesCorrige 19 Tele 1Reed DoloPas encore d'évaluation
- C3 Resolution Systemes Lineaires Enrico NajiDocument73 pagesC3 Resolution Systemes Lineaires Enrico NajiHajarYazinePas encore d'évaluation
- Fraction ContinueDocument5 pagesFraction ContinueHasnaa TalibiPas encore d'évaluation
- Equation DiffDocument1 pageEquation DiffNapsterPas encore d'évaluation
- TD 1 Al LinDocument4 pagesTD 1 Al LinALI ALIPas encore d'évaluation
- Examen Analyse 1 RattrapageDocument1 pageExamen Analyse 1 RattrapageHamza BoutlihPas encore d'évaluation
- Exercices TopologieDocument8 pagesExercices TopologieBocar DiongPas encore d'évaluation
- Exercice de TopologieDocument1 pageExercice de Topologiegreat manPas encore d'évaluation
- DS Se2 2010-2011Document3 pagesDS Se2 2010-2011Djamila BekhedidjaPas encore d'évaluation
- TP 03 - RéseauDocument10 pagesTP 03 - Réseaucilem ouardia100% (1)
- Initiation A La Simulation NumeriqueDocument18 pagesInitiation A La Simulation Numeriqueasmaa jaPas encore d'évaluation
- Cours - Raisonner, Rediger PDFDocument9 pagesCours - Raisonner, Rediger PDF6666666666666-545255Pas encore d'évaluation
- Opale 3.4Document82 pagesOpale 3.4Amre MaarirPas encore d'évaluation
- Usim Pac: Logiciel de Simulation Et de Modélisation de ProcédésDocument4 pagesUsim Pac: Logiciel de Simulation Et de Modélisation de ProcédésSAMUELPATHRAPas encore d'évaluation
- 01 - LINUX GénéralitéDocument15 pages01 - LINUX Généralitépierre100% (1)
- 14 12 05 Office 365 PDFDocument1 page14 12 05 Office 365 PDFKwaku TchedrePas encore d'évaluation
- Sys Prod 09 - 10 - Les Lignes Dassemblage - CompletDocument101 pagesSys Prod 09 - 10 - Les Lignes Dassemblage - Complethamza elgarrag100% (1)
- Amdec CoursDocument8 pagesAmdec CoursO Z100% (2)
- Les Principaux Raccourcis Clavier Pour WindowsDocument3 pagesLes Principaux Raccourcis Clavier Pour WindowsDerlitch Ipelboussou MouendouPas encore d'évaluation
- Brochure-IM - 2500 À IM 6000Document8 pagesBrochure-IM - 2500 À IM 6000Agbokè Kossi Joachim Moumouni (Joachi'm)Pas encore d'évaluation
- Pr. Mustapha JOHRIDocument32 pagesPr. Mustapha JOHRIبروليتارياPas encore d'évaluation
- Persos ShadowrunDocument47 pagesPersos ShadowrunStalineJrPas encore d'évaluation
- Ifaw 3 2022 2023 JSPDocument36 pagesIfaw 3 2022 2023 JSPmaria boujawdehPas encore d'évaluation
- Graphes Et Gestion de Projets (MPM) PDFDocument5 pagesGraphes Et Gestion de Projets (MPM) PDFAbderrahim El IdrissiPas encore d'évaluation
- Bizhub 185 - User Guide - FR - 1 2 1Document148 pagesBizhub 185 - User Guide - FR - 1 2 1Citoyan CivilPas encore d'évaluation
- Exercices Miroirs MosDocument9 pagesExercices Miroirs MosmedPas encore d'évaluation
- Bases de DonneesDocument34 pagesBases de DonneesentredosmundosPas encore d'évaluation
- Brochure WX26 Simple PDFDocument92 pagesBrochure WX26 Simple PDFRANDRIAMISATAPas encore d'évaluation
- XPSUAK32APDocument8 pagesXPSUAK32APjediahftwPas encore d'évaluation
- RRC 2Document18 pagesRRC 2lahbak abderrahmenePas encore d'évaluation
- Iec 61000 4 7 2002 Amd1 2008 CSVDocument15 pagesIec 61000 4 7 2002 Amd1 2008 CSVFelipeSilvaPas encore d'évaluation
- TD 3Document1 pageTD 3jmalrahma369Pas encore d'évaluation
- 01-Excel Tableur Vs SGBD PDFDocument6 pages01-Excel Tableur Vs SGBD PDFPa MiPas encore d'évaluation
- Rapport TTDocument15 pagesRapport TTRose KongoPas encore d'évaluation
- Dugo 3 2 2 2 2Document1 pageDugo 3 2 2 2 2Raymond ReddingtonPas encore d'évaluation
- Bases de CommutationDocument19 pagesBases de Commutationgeo olendaPas encore d'évaluation
- ATS Genie-Electrique 2007 ATS PDFDocument11 pagesATS Genie-Electrique 2007 ATS PDFsb aliPas encore d'évaluation