Vous aimerez peut-être aussi
- Exos ReductionDocument11 pagesExos ReductioneuzefraPas encore d'évaluation
- Cours AritmetiqDocument3 pagesCours AritmetiqCla sher cocPas encore d'évaluation
- Cours DenombDocument3 pagesCours DenombCla sher cocPas encore d'évaluation
- TD DenombDocument3 pagesTD DenombCla sher cocPas encore d'évaluation
- CTRL 3 Bis 0809Document2 pagesCTRL 3 Bis 0809Cla sher cocPas encore d'évaluation
- Limites Fonctions UsuellesDocument1 pageLimites Fonctions UsuellesayuoPas encore d'évaluation
- Cours Revisions UpDocument19 pagesCours Revisions UpomarPas encore d'évaluation
- CTRL 50809 CDocument4 pagesCTRL 50809 CCla sher cocPas encore d'évaluation
- CTRL 210809 CDocument4 pagesCTRL 210809 CCla sher cocPas encore d'évaluation
- Inner QueenDocument13 pagesInner QueenAnselmo Rodrigues SantosPas encore d'évaluation
- Újdonságok: ZeneiskolásoknakDocument20 pagesÚjdonságok: Zeneiskolásoknakglajho100% (1)
- 13 Waltz ConsolationDocument5 pages13 Waltz Consolationlyphard98Pas encore d'évaluation
- Sublote 2B-1 Miguel Alberto Cardenas NoblecillaDocument1 pageSublote 2B-1 Miguel Alberto Cardenas NoblecillaOmar Mendoza AyalaPas encore d'évaluation
- Residence Bleu Horizon: EST SUD NordDocument1 pageResidence Bleu Horizon: EST SUD NordJean christian RandriamahavitaPas encore d'évaluation
- AttachmentDocument1 pageAttachmentteshomePas encore d'évaluation
- Miramar A3Document1 pageMiramar A3marco rodriguezPas encore d'évaluation
- 60 Dias Apaixonado - MILIONÁRIO E JOSÉ RICO PDFDocument3 pages60 Dias Apaixonado - MILIONÁRIO E JOSÉ RICO PDFAulas De Violino LondrinaPas encore d'évaluation
- Principe AzulDocument1 pagePrincipe AzulMaria Eugenia Baralt HiguerosPas encore d'évaluation
- 2022-05-Sharelock FacadeDocument8 pages2022-05-Sharelock FacadeHauraImanaShahiraPas encore d'évaluation
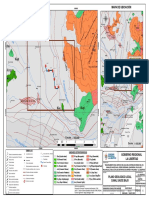
- Mapa Geologico Local - Canal Sauce BajoDocument1 pageMapa Geologico Local - Canal Sauce BajoRAUL MONTEZAPas encore d'évaluation
- 11 - 12 015a Euphonium BC R1 W ScalesDocument3 pages11 - 12 015a Euphonium BC R1 W ScalesJoshPas encore d'évaluation
- PL - Interlignes EDL-CE2-WDocument2 pagesPL - Interlignes EDL-CE2-WLau BrnPas encore d'évaluation
- Carte D'identité 24 Mars 2023Document1 pageCarte D'identité 24 Mars 2023Diany LandressePas encore d'évaluation
- PDF SubdivisiónDocument1 pagePDF Subdivisiónchristian loaiza vivasPas encore d'évaluation
- A Grande FamíliaDocument2 pagesA Grande FamíliaRodrigo Augusto CorrêaPas encore d'évaluation
- 380 Residencesenfrance PDFDocument50 pages380 Residencesenfrance PDFEvelyn VergaraPas encore d'évaluation
- Tablo Upravlenie MTZ 2 C911a9fe E1c7 4ebb 9ab4 E5a72bf0dc08Document1 pageTablo Upravlenie MTZ 2 C911a9fe E1c7 4ebb 9ab4 E5a72bf0dc08cnmengineeringPas encore d'évaluation
- AzzurroDocument1 pageAzzurrorferenacPas encore d'évaluation
- Hannibal - Un Moteur de Recherche Avec Plug-In en ArabeDocument57 pagesHannibal - Un Moteur de Recherche Avec Plug-In en ArabeImed ChihiPas encore d'évaluation
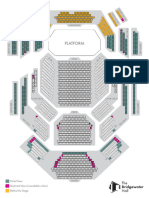
- BWH Auditorium Plan New 2018 Seat DescriptionsDocument1 pageBWH Auditorium Plan New 2018 Seat DescriptionsRitikaPas encore d'évaluation
- Projet de Construction Du Centre Agro de KatiDocument1 pageProjet de Construction Du Centre Agro de KatiOuins OlympePas encore d'évaluation
- Moncayo Huapango 4 Guitarras Score y PartesDocument35 pagesMoncayo Huapango 4 Guitarras Score y PartesHerrera Olivarria José NahimPas encore d'évaluation
- 1Document1 page1MassimoPas encore d'évaluation
- Habitat 12 de OctubreDocument1 pageHabitat 12 de Octubremarco rodriguezPas encore d'évaluation
- Plano de Señalización Car Sector 001000 Malla 000 - Layout1Document1 pagePlano de Señalización Car Sector 001000 Malla 000 - Layout1Estefano BalarezoPas encore d'évaluation
- Plano de Señalización Car Sector 001000 Malla 000Document1 pagePlano de Señalización Car Sector 001000 Malla 000Estefano BalarezoPas encore d'évaluation
- Captura 2021-07-01 A Las 14.47.12Document1 pageCaptura 2021-07-01 A Las 14.47.12Jose GallardoPas encore d'évaluation
- Citalis 2022 Fiche Horaire Ligne 53Document2 pagesCitalis 2022 Fiche Horaire Ligne 53benPas encore d'évaluation
- CAD Map - Solitaire Share - LandDocument1 pageCAD Map - Solitaire Share - LandVaibhav MiglaniPas encore d'évaluation
- Buganvilla Parcelacion Comercial 15.08.2023Document1 pageBuganvilla Parcelacion Comercial 15.08.2023rosario peseros castroPas encore d'évaluation
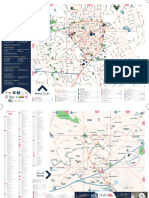
- Centre: NîmesDocument2 pagesCentre: NîmesViso del Marqués MediaPas encore d'évaluation
- 69 - SifrDocument7 pages69 - SifrkurtoskePas encore d'évaluation
- Practical Guidelines On Fluid Therapy by DR Sanjay Pandya 2nd Edition by DR Sanjay PandyaDocument395 pagesPractical Guidelines On Fluid Therapy by DR Sanjay Pandya 2nd Edition by DR Sanjay PandyaHarshitha Rao100% (2)
- 02 Cristo Del Amor t1Document1 page02 Cristo Del Amor t1Alvaro Lazaro BruzonPas encore d'évaluation
- U-06 Proprietate Asupra TerenuluiDocument1 pageU-06 Proprietate Asupra TerenuluigobekgobekPas encore d'évaluation
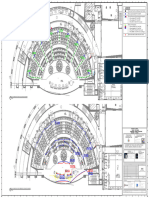
- AREP-SRSM-SR-ELEC-EXE-Plan D'implantation Eclairage Et Prises de Courant GradinsDocument1 pageAREP-SRSM-SR-ELEC-EXE-Plan D'implantation Eclairage Et Prises de Courant Gradinselmehdi123elkissaiPas encore d'évaluation
- CDK Rci Ab Plano Rci 101 CubiertaDocument1 pageCDK Rci Ab Plano Rci 101 CubiertaOscar RhenalsPas encore d'évaluation
- REPLANTEO PlanoDocument1 pageREPLANTEO PlanoHugo E RCPas encore d'évaluation
- Une Vie de ChienDocument6 pagesUne Vie de ChienChrysalidePas encore d'évaluation
- Valve Insertion - NHSDocument1 pageValve Insertion - NHSmoonvisePas encore d'évaluation
- 01 DEBO 22300 - SS U1 01 - VA - 2023-12-21 - Deü1.KG-22300 - SS U2 01Document1 page01 DEBO 22300 - SS U1 01 - VA - 2023-12-21 - Deü1.KG-22300 - SS U2 01Suad HalilovicPas encore d'évaluation
- Ubicacion de MureteDocument1 pageUbicacion de Mureteyhonny hugo ricra moralesPas encore d'évaluation
- LBST Mini Plan Lorient 2021 BDDocument2 pagesLBST Mini Plan Lorient 2021 BDmarcPas encore d'évaluation
- Jesu, Joy of Man's Desiring - Score and PartsDocument18 pagesJesu, Joy of Man's Desiring - Score and PartsTroy LucasPas encore d'évaluation
- Garde Républicaine: Bab EzzouarDocument1 pageGarde Républicaine: Bab EzzouarBouchra maria BouterkaPas encore d'évaluation
- Estrela (Bass Line)Document1 pageEstrela (Bass Line)Auriu IrigoitePas encore d'évaluation
- Un Ramito de VioletasDocument2 pagesUn Ramito de VioletasSeve Martinez VillarPas encore d'évaluation
- CNC MP Physique 2 2011c2Document15 pagesCNC MP Physique 2 2011c2Mounir LahraichiPas encore d'évaluation
- Diffusion Thermique 1Document16 pagesDiffusion Thermique 1Mounir LahraichiPas encore d'évaluation
- Complex It eDocument4 pagesComplex It eMounir LahraichiPas encore d'évaluation
- P 11 TDMDocument158 pagesP 11 TDMMounir LahraichiPas encore d'évaluation
- CNC Maths2 MP 2017e1Document4 pagesCNC Maths2 MP 2017e1Mounir LahraichiPas encore d'évaluation
- Pour Bien Preparer Le ConcourDocument5 pagesPour Bien Preparer Le ConcourLamiaa Laam100% (2)
- Mathematiques 1: SESSION 2017 MPMA102Document4 pagesMathematiques 1: SESSION 2017 MPMA102Mounir LahraichiPas encore d'évaluation
- Phy Psi 2 2017 2Document8 pagesPhy Psi 2 2017 2Mounir LahraichiPas encore d'évaluation
- Cours Slides (Chap 1&2&3) - SlidesDocument55 pagesCours Slides (Chap 1&2&3) - Slideslamiae outahmiditPas encore d'évaluation
- Corrige Chapitre 3Document14 pagesCorrige Chapitre 3Justine DjuikomPas encore d'évaluation
- Topologie Notes LastDocument115 pagesTopologie Notes LastAlcalinaPhysicsPas encore d'évaluation
- PolyDocument50 pagesPolyErd NdinePas encore d'évaluation
- Degre Topo AlireDocument20 pagesDegre Topo AlirehaloanesPas encore d'évaluation
- Espace Vectorielle NorméDocument57 pagesEspace Vectorielle NorméImane GhanouPas encore d'évaluation
- MTH 222 (Recherche)Document4 pagesMTH 222 (Recherche)Mazama-Esso Moddoh OclooPas encore d'évaluation
- SYL L1 Spe PhyDocument38 pagesSYL L1 Spe PhyMaster BlockPas encore d'évaluation
- Précompacité Et Théorème D'ascoli PDFDocument5 pagesPrécompacité Et Théorème D'ascoli PDFAbdou ParizienePas encore d'évaluation
- Poly de CIPDocument72 pagesPoly de CIPBadre MhiouahPas encore d'évaluation
- Analyse Fonctionnelle Et Traitement Du SignalDocument76 pagesAnalyse Fonctionnelle Et Traitement Du SignalIésus Sousa FreirePas encore d'évaluation
- PolyDocument203 pagesPolynmiendaPas encore d'évaluation
- Serie1 Ana5 S3Document2 pagesSerie1 Ana5 S3jvvjPas encore d'évaluation
- Homotoppart 1Document137 pagesHomotoppart 1Abdellah AzzouzPas encore d'évaluation
- 1 Espaces Vectoriels Norm Es: 1.1 Norme, Espace Vectoriel Norm eDocument17 pages1 Espaces Vectoriels Norm Es: 1.1 Norme, Espace Vectoriel Norm e123456789Pas encore d'évaluation
- RieszDocument2 pagesRieszgrufallaxPas encore d'évaluation
- Cours 5 Actions Propres FibrésDocument66 pagesCours 5 Actions Propres Fibrésabdelhakim asslnPas encore d'évaluation
- TD AfaDocument19 pagesTD AfaRoger SawadogoPas encore d'évaluation
- Espace LPDocument18 pagesEspace LPⴰⴱⵓ ⴰⵍⴰⴻPas encore d'évaluation
- Fic 00138Document17 pagesFic 00138SimoZorganePas encore d'évaluation
- Optimisation 1Document7 pagesOptimisation 1Zozo Zozo DiagnePas encore d'évaluation
- Colmez Elements D'analyse Et D'algebreDocument489 pagesColmez Elements D'analyse Et D'algebreAnonymous TlGnQZv5d7100% (1)
- Pàlycope de Cours de Master 2020-2021Document66 pagesPàlycope de Cours de Master 2020-2021Nouerddine OuldkhouiaPas encore d'évaluation
- A Connaitre ParfaitementDocument20 pagesA Connaitre ParfaitementMouna MimiPas encore d'évaluation
- HoloDocument32 pagesHoloTaha AinouchPas encore d'évaluation
- BOUARICHDocument217 pagesBOUARICHsabri rabie100% (1)
- 40 Theoreme de BaireDocument4 pages40 Theoreme de BaireAmin ZekriPas encore d'évaluation
- L3 - Cours de Calcul Differentiel - 2017-2018Document35 pagesL3 - Cours de Calcul Differentiel - 2017-2018claudiaPas encore d'évaluation
- (Lecture Notes) Henri Lombardi, Claude Quitté - Dimension de Krull Explicite. Application Aux Théorèmes de Kronecker, Bass, Serre Et Forster (2013)Document21 pages(Lecture Notes) Henri Lombardi, Claude Quitté - Dimension de Krull Explicite. Application Aux Théorèmes de Kronecker, Bass, Serre Et Forster (2013)Henriot TahinaPas encore d'évaluation
- Td4 - Topologie Fonctions-LineairesDocument2 pagesTd4 - Topologie Fonctions-LineairesibouPas encore d'évaluation