Vous aimerez peut-être aussi
- GS-457tff0 PDS 6854-000 EngDocument8 pagesGS-457tff0 PDS 6854-000 Engbasheer almetwakel100% (1)
- Mini Projet Sur La Methode Des Moindres Carrees PDFDocument13 pagesMini Projet Sur La Methode Des Moindres Carrees PDFSamir Haddar100% (1)
- PROBA-STAT Procesus StochastiqueDocument39 pagesPROBA-STAT Procesus StochastiqueMassamba KanePas encore d'évaluation
- RoulementsDocument3 pagesRoulementsOutmane Lakhlili100% (1)
- Méthode Des Moindres Carrés PDFDocument6 pagesMéthode Des Moindres Carrés PDFRoberto100% (1)
- Cours D'ÉconométrieDocument257 pagesCours D'ÉconométrieSilviu100% (1)
- Processus M2 PDFDocument118 pagesProcessus M2 PDFMohamed RdaitPas encore d'évaluation
- PDF Transf en Z Cours SiteDocument28 pagesPDF Transf en Z Cours Sitego0oglePas encore d'évaluation
- Methode Du SimplexeDocument68 pagesMethode Du SimplexeprincessdiaressPas encore d'évaluation
- QuadratiqueDocument9 pagesQuadratiqueAD ILPas encore d'évaluation
- Optimisation Non LinéaireDocument156 pagesOptimisation Non LinéaireTarek ZeblahPas encore d'évaluation
- Cours Optimisation Insa PDFDocument100 pagesCours Optimisation Insa PDFElbahi DjaalabPas encore d'évaluation
- Travaux Pratiques de Stabilité Des Sytéme AsservisDocument12 pagesTravaux Pratiques de Stabilité Des Sytéme AsservisYacine100% (1)
- Algèbre (Matrices) PDFDocument124 pagesAlgèbre (Matrices) PDFHicham Ait-bella100% (1)
- Id 5939 PDFDocument52 pagesId 5939 PDFELmokhtar Hamrouni100% (1)
- Exos Application 1Document2 pagesExos Application 1Aymen HedPas encore d'évaluation
- Chapitre 2 LAT51Document50 pagesChapitre 2 LAT51Aķ RamPas encore d'évaluation
- Le Modèle À Retards EchelonnésDocument9 pagesLe Modèle À Retards EchelonnésmaryyePas encore d'évaluation
- MEC202 Poly TP 2021Document26 pagesMEC202 Poly TP 2021AyoubIghzirPas encore d'évaluation
- PSI - Matrice CoursDocument5 pagesPSI - Matrice Coursbenabbes majdaPas encore d'évaluation
- XML Kenzi (1) New2Document126 pagesXML Kenzi (1) New2Moad EddalossPas encore d'évaluation
- SimplexeDocument46 pagesSimplexeOlfa harrabiPas encore d'évaluation
- Bode PDFDocument10 pagesBode PDFYoussefSaroukhPas encore d'évaluation
- Optimisation Meddeb 2017Document72 pagesOptimisation Meddeb 2017PFEPas encore d'évaluation
- Les Lois Dérivées de La Loi NormaleDocument15 pagesLes Lois Dérivées de La Loi Normalearij ben azizaPas encore d'évaluation
- Bayes ExamplesDocument9 pagesBayes ExamplesMaria AminaPas encore d'évaluation
- Recherche OperDocument89 pagesRecherche Opersofien msalmiPas encore d'évaluation
- Programmes Lineaires, Modelisation Et Resolution GraphiqueDocument67 pagesProgrammes Lineaires, Modelisation Et Resolution GraphiqueMziou HammadiPas encore d'évaluation
- Cours MatricesDocument17 pagesCours Matricesapi-309163111Pas encore d'évaluation
- 145 Analyse Des Systemes AsservisDocument9 pages145 Analyse Des Systemes AsservisMohamed LahninePas encore d'évaluation
- Cours Analyse SMPC S1 MarocDocument75 pagesCours Analyse SMPC S1 MarocWadii ChinounPas encore d'évaluation
- Maths2 RangDocument7 pagesMaths2 RangMustapha Berami100% (1)
- TP AsservissementDocument9 pagesTP Asservissementghellai younesPas encore d'évaluation
- 9C 10matrices Determinants PDFDocument21 pages9C 10matrices Determinants PDFAllaoua LalaounaPas encore d'évaluation
- Jean-Pierre Lecoutre - TD Statistique Et Probabilités - 6e Édition-Dunod (2015) .PDF - HTMLDocument208 pagesJean-Pierre Lecoutre - TD Statistique Et Probabilités - 6e Édition-Dunod (2015) .PDF - HTMLAhmed RabiiPas encore d'évaluation
- Math IAEDocument135 pagesMath IAEsiham ssPas encore d'évaluation
- Intégrales Impropres Des Fonctions Positives-Intégrales de Riemann PDFDocument3 pagesIntégrales Impropres Des Fonctions Positives-Intégrales de Riemann PDFAmira DhorbaniPas encore d'évaluation
- Cours Rech Operat PDFDocument29 pagesCours Rech Operat PDFHamidSeghiouerPas encore d'évaluation
- TP Solveur PDFDocument9 pagesTP Solveur PDFAnas BourehimPas encore d'évaluation
- Cours Ro EpsDocument112 pagesCours Ro Epskenzi khadijaPas encore d'évaluation
- Gradient A Pas Fixe PDFDocument12 pagesGradient A Pas Fixe PDFDriß MarsukPas encore d'évaluation
- Cours MatlabDocument47 pagesCours MatlabKatla ArbiPas encore d'évaluation
- Guide Econometrie MatlabDocument50 pagesGuide Econometrie MatlabRoland Marc Lontchi TchoffoPas encore d'évaluation
- Les Chaines de CaractèresDocument18 pagesLes Chaines de CaractèresPatrick NgakouPas encore d'évaluation
- Upload-Série D'exercices N°7-Asservissement-2014-2015Document7 pagesUpload-Série D'exercices N°7-Asservissement-2014-2015AmaniBarkawiPas encore d'évaluation
- Modélisation Des Systèmes DynamiquesDocument4 pagesModélisation Des Systèmes Dynamiquesbadro1980Pas encore d'évaluation
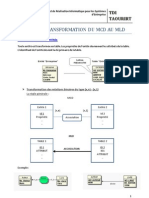
- Règles de Transformation Du MCD Au MLDDocument4 pagesRègles de Transformation Du MCD Au MLDImane TarchounPas encore d'évaluation
- Arsln ZMFMDocument97 pagesArsln ZMFMHolaPas encore d'évaluation
- Analyse MultidimensionnelleDocument157 pagesAnalyse MultidimensionnelleEden Sam IndexPas encore d'évaluation
- Examen 2013 PDFDocument4 pagesExamen 2013 PDFEl MagoPas encore d'évaluation
- Support P1 Prévisions GénéralitésDocument28 pagesSupport P1 Prévisions GénéralitésOumaima Ben SaidPas encore d'évaluation
- Cours SurvieDocument59 pagesCours SurvieFranck BouePas encore d'évaluation
- Systemes Asservis LineairesDocument85 pagesSystemes Asservis LineairesHounkpessodePas encore d'évaluation
- M1mmd MouvementBrownien Ibtjtgt v7 3Document213 pagesM1mmd MouvementBrownien Ibtjtgt v7 3LolaPas encore d'évaluation
- Box JenkinsDocument109 pagesBox JenkinsMaria AminaPas encore d'évaluation
- Ana NumDocument45 pagesAna NumYoucef Br'sPas encore d'évaluation
- Cours-System Lineaire IdentificationDocument78 pagesCours-System Lineaire IdentificationboucharebPas encore d'évaluation
- Nonlineaire 1Document84 pagesNonlineaire 1IdrisPas encore d'évaluation
- Econometrie PDFDocument113 pagesEconometrie PDFsamirnetPas encore d'évaluation
- Cours Analyse 2 CAP CEGDocument27 pagesCours Analyse 2 CAP CEGLamine SavadogoPas encore d'évaluation
- Les Structures Algebriques - EL KHATTABI Mohamed - 1290Document32 pagesLes Structures Algebriques - EL KHATTABI Mohamed - 1290Colmain NassiriPas encore d'évaluation
- MAT4112 Notes v2003Document131 pagesMAT4112 Notes v2003Herve Fokou NDOUMBE RICHARDPas encore d'évaluation
- Évaluation GazDocument4 pagesÉvaluation GazkarinePas encore d'évaluation
- Controle Des PreformesDocument5 pagesControle Des PreformesNadyaPas encore d'évaluation
- Stabilité Des TalusDocument98 pagesStabilité Des TalusEl Mehdi El Fadli100% (2)
- CCP Tsi 2017 Maths EpreuveDocument10 pagesCCP Tsi 2017 Maths EpreuveZH hasnaePas encore d'évaluation
- Sollicitation ComposéeDocument4 pagesSollicitation ComposéeCamara MahamadouPas encore d'évaluation
- Grandeurs Physiques 1 PDFDocument10 pagesGrandeurs Physiques 1 PDFAutumn Assirem TrefoilPas encore d'évaluation
- Cours C121 MIP 2019-2020 Ouafa TAHIRI ALAOUIDocument71 pagesCours C121 MIP 2019-2020 Ouafa TAHIRI ALAOUIOUAFA TAHIRIALAOUIPas encore d'évaluation
- Utilisation de L'essai Pressiométrique Pour L'identification de Paramètres Intrinsèques Du Comportement D'un SolDocument90 pagesUtilisation de L'essai Pressiométrique Pour L'identification de Paramètres Intrinsèques Du Comportement D'un SolMova GatalassPas encore d'évaluation
- Cour 3 Mécan Quantique s4Document99 pagesCour 3 Mécan Quantique s4moha100% (2)
- Tp1 ThermocoupleDocument3 pagesTp1 Thermocouplehayouta07Pas encore d'évaluation
- TP3 - CM - Exemple - Calcul - Panne EC3Document11 pagesTP3 - CM - Exemple - Calcul - Panne EC3AYYOUB ESSAKKAKIPas encore d'évaluation
- Bac C - 2002Document9 pagesBac C - 2002Heureux BanzoulouPas encore d'évaluation
- إمتحان تجريبي - 031549Document3 pagesإمتحان تجريبي - 031549Omar OuhendaPas encore d'évaluation
- Reparationn Des Systemes D'injection DieselDocument64 pagesReparationn Des Systemes D'injection Dieselbhsbhs1993% (15)
- Epreuve de MecaniqueDocument8 pagesEpreuve de MecaniqueJe suis Je suisPas encore d'évaluation
- Espaceaffinealg2 (MIP Et IA)Document25 pagesEspaceaffinealg2 (MIP Et IA)jackfor603Pas encore d'évaluation
- Tout Savoir Sur La Régression PénaliséDocument19 pagesTout Savoir Sur La Régression PénaliséMor fall sylaPas encore d'évaluation
- R A D P: Épublique Lgérienne Émocratique Et OpulaireDocument93 pagesR A D P: Épublique Lgérienne Émocratique Et Opulairerahma AyPas encore d'évaluation
- Introduction Aux Prob Abilites Eta La StatistiqueDocument86 pagesIntroduction Aux Prob Abilites Eta La StatistiqueEudes De L'Esprit SaintPas encore d'évaluation
- Poly - Pcem1-Theme4 - by Med - TMSSDocument137 pagesPoly - Pcem1-Theme4 - by Med - TMSSjehane oussamaPas encore d'évaluation
- Test Du Premier CoursDocument2 pagesTest Du Premier CoursbouchoulechatPas encore d'évaluation
- EMBRAYAGE - FREINS - App PDFDocument4 pagesEMBRAYAGE - FREINS - App PDFHanane Tounsi88% (8)
- Devoir Sciences Physique Et ChimieDocument2 pagesDevoir Sciences Physique Et Chimieelfiguigui2011Pas encore d'évaluation
- (Bibliothã Que Tangente Hors-Sã©rie Nâ°44) Collectif - Les Matrices - Une Reprã©sentation Du Monde (2012, POLE)Document164 pages(Bibliothã Que Tangente Hors-Sã©rie Nâ°44) Collectif - Les Matrices - Une Reprã©sentation Du Monde (2012, POLE)mameyirim100% (1)