Vous aimerez peut-être aussi
- Résumé Global Du Cours de Sciences de L'ingénieurDocument30 pagesRésumé Global Du Cours de Sciences de L'ingénieuralbertocontador57% (14)
- MONTRÉALDocument2 pagesMONTRÉALTeona StanciuPas encore d'évaluation
- Pix4D GuidePratiqueDocument69 pagesPix4D GuidePratiquedjiby ama ndiayePas encore d'évaluation
- Panomara Du Basketball en FranceDocument33 pagesPanomara Du Basketball en FranceDavid EkaboumaPas encore d'évaluation
- Module Turtle TP2 EleveDocument2 pagesModule Turtle TP2 ElevePROF PROF50% (2)
- Devoir de Synthèse 1s4grp1 Fevrier 2019 - CopieDocument2 pagesDevoir de Synthèse 1s4grp1 Fevrier 2019 - Copiemaha mahjoub100% (3)
- Cours - 8 - Turtle Sur PythonDocument5 pagesCours - 8 - Turtle Sur PythonLamiss Ghoul100% (1)
- Devoir de Synthèse 1s4grp1 Fevrier 2019Document2 pagesDevoir de Synthèse 1s4grp1 Fevrier 2019maha mahjoub100% (1)
- TP N°2 Python - RhimiDocument1 pageTP N°2 Python - RhimiHouda Nechi100% (2)
- Python 1Document3 pagesPython 1g.manoulaPas encore d'évaluation
- Turtle 2Document3 pagesTurtle 2Wael Chouchène50% (2)
- Séance 2-PythonDocument7 pagesSéance 2-PythonRoyoume LayeliiPas encore d'évaluation
- Tp3-Énoncé CorrectionDocument7 pagesTp3-Énoncé CorrectionfoufouaPas encore d'évaluation
- Correction - 1ere Année - TP2 Python Turtle V Hassen 2020 - 2021Document4 pagesCorrection - 1ere Année - TP2 Python Turtle V Hassen 2020 - 2021Naim Hammami100% (1)
- Curriculum 1ere AnnéeDocument12 pagesCurriculum 1ere AnnéeB Ali AdelPas encore d'évaluation
- Turtle 1Document2 pagesTurtle 1Wael Chouchène100% (1)
- 1ere Année - Support de Cours Python v009Document2 pages1ere Année - Support de Cours Python v009RaniaElleuchAbid100% (1)
- TP1: Introduction À La Programmation: From Turtle Import Forward (100) Left (90) ForwardDocument2 pagesTP1: Introduction À La Programmation: From Turtle Import Forward (100) Left (90) ForwardPROF PROF100% (1)
- ChilaformiDocument4 pagesChilaformiFatma Ben Dhaou100% (1)
- TP Word N°5Document2 pagesTP Word N°5zizou100% (1)
- DC Evaluation2 2info T2Document2 pagesDC Evaluation2 2info T2Hm WalidPas encore d'évaluation
- SMI SMA Examen Prog1 S3 2015 2016Document2 pagesSMI SMA Examen Prog1 S3 2015 2016Fatima Zahra100% (1)
- DEVOIR DE SYNTHESE N°1 INFORMATIQUE 1èreDocument6 pagesDEVOIR DE SYNTHESE N°1 INFORMATIQUE 1èreMajdi BelguithPas encore d'évaluation
- Ds 1Document5 pagesDs 1Lamiss GhoulPas encore d'évaluation
- Programmation Avec Python Module TURTLE 3Document1 pageProgrammation Avec Python Module TURTLE 3walid ben abdallahPas encore d'évaluation
- TP2 PythonDocument2 pagesTP2 Pythondhaouadi hazemPas encore d'évaluation
- Correction Session PrincipaleDocument7 pagesCorrection Session Principalesouissi_mohsenPas encore d'évaluation
- Cours Python Partie UPBDocument64 pagesCours Python Partie UPBKouassi Fieni Jean YaoPas encore d'évaluation
- Cours HTML PDFDocument7 pagesCours HTML PDFludo1900Pas encore d'évaluation
- Mon dc2Document5 pagesMon dc2Royoume LayeliiPas encore d'évaluation
- Série N°4 2013 2014 (Hichem Kemali) (Pilote Médenine)Document5 pagesSérie N°4 2013 2014 (Hichem Kemali) (Pilote Médenine)Mohamed SaidiPas encore d'évaluation
- BAC BLANC Lettres Nouveau RegimesDocument5 pagesBAC BLANC Lettres Nouveau RegimesPROF PROFPas encore d'évaluation
- TP Js Serie2Document7 pagesTP Js Serie2ZhairaChannouf0% (1)
- Bac BlancDocument3 pagesBac BlancRaniaElleuchAbidPas encore d'évaluation
- 1 Cours PythonDocument10 pages1 Cours PythonMarroco momoPas encore d'évaluation
- DevoirCtrl 3SI Hannibal 2022-2023Document2 pagesDevoirCtrl 3SI Hannibal 2022-2023Ghassen AMAIMIAPas encore d'évaluation
- Exercices Sur Les TableauxDocument3 pagesExercices Sur Les TableauxRoyoume LayeliiPas encore d'évaluation
- ds1 2eme InfoDocument4 pagesds1 2eme Infolaz100% (1)
- TP1 Pandas Version ElevesDocument4 pagesTP1 Pandas Version Elevesabdallah profinfoPas encore d'évaluation
- Aide 2TI-P2Document5 pagesAide 2TI-P2RaniaElleuchAbidPas encore d'évaluation
- Chapitre 4 - Les Structures Itératives - N - Prof - 2022Document4 pagesChapitre 4 - Les Structures Itératives - N - Prof - 2022mahjoubi RabiePas encore d'évaluation
- DS N°3 4éco3 Bac BlancDocument4 pagesDS N°3 4éco3 Bac BlancLamiss GhoulPas encore d'évaluation
- 1èreDS2 Python 2020Document2 pages1èreDS2 Python 2020Lamiss Ghoul100% (4)
- Algorithmique II Examen Final 2018 - 2019 CorrDocument4 pagesAlgorithmique II Examen Final 2018 - 2019 CorrSalma HaouchPas encore d'évaluation
- Cours - Informatique - 9ème (2010-2011) Anissa TEYEBDocument6 pagesCours - Informatique - 9ème (2010-2011) Anissa TEYEBSamira Elkamel0% (1)
- Création D'un Formulaire À L'aide de Google FormsDocument2 pagesCréation D'un Formulaire À L'aide de Google Formswalid ben abdallah100% (1)
- Prototype Pratique LettresDocument2 pagesPrototype Pratique LettresPROF PROFPas encore d'évaluation
- Atelier Pratique Sur Les Tableaux en PythonDocument2 pagesAtelier Pratique Sur Les Tableaux en PythonZakaria LabayPas encore d'évaluation
- Activité 1 (Interfaces Graphiques) : ExempleDocument2 pagesActivité 1 (Interfaces Graphiques) : ExemplemsalmiPas encore d'évaluation
- Devoir de Synthèse Scratch Avec CorrectionDocument4 pagesDevoir de Synthèse Scratch Avec CorrectionBac LettrePas encore d'évaluation
- Série D'exercices N°2 - Algorithmique Pour La Revision - Bac Informatique (2010-2011) Elève Mahdhi MabroukDocument3 pagesSérie D'exercices N°2 - Algorithmique Pour La Revision - Bac Informatique (2010-2011) Elève Mahdhi MabroukSaifeddine MakniPas encore d'évaluation
- Python 1année Tp1Document4 pagesPython 1année Tp1Ahlem KafelaPas encore d'évaluation
- TransfertDocument7 pagesTransfertBacem HAMMAMIPas encore d'évaluation
- Devoir de Contrôle N°2 TP Corrigé Algo 2019 2020 (Ahmed Noureddine) (Lycée Garçon Sousse)Document6 pagesDevoir de Contrôle N°2 TP Corrigé Algo 2019 2020 (Ahmed Noureddine) (Lycée Garçon Sousse)mohamed tnPas encore d'évaluation
- Devoir-De-Synthèse-N°2-Exemple - 2Document4 pagesDevoir-De-Synthèse-N°2-Exemple - 2Mohamed SaidiPas encore d'évaluation
- 3 Eme LettreDocument4 pages3 Eme Lettreraouf100% (1)
- Devoir de Synthèse N°2 - Algorithmique - Bac Informatique (2018-2019) MR ALOUINIDocument4 pagesDevoir de Synthèse N°2 - Algorithmique - Bac Informatique (2018-2019) MR ALOUINIRouaissi RidhaPas encore d'évaluation
- Nombres de KeithDocument4 pagesNombres de KeithsawamiPas encore d'évaluation
- Devoir Controle Informatique 2 CorrigéDocument3 pagesDevoir Controle Informatique 2 CorrigéhalissoPas encore d'évaluation
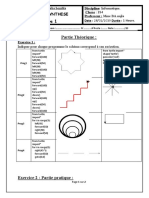
- Exercice 1 - Les Formes SimplesDocument1 pageExercice 1 - Les Formes SimplesAhmed IssaouiPas encore d'évaluation
- Bac Blanc - STI - SIDocument11 pagesBac Blanc - STI - SIbwajihPas encore d'évaluation
- Devoir 2SIDocument3 pagesDevoir 2SIHadj Hani Abed Elhamid100% (1)
- Cours de Python - 9 - TurtleDocument5 pagesCours de Python - 9 - TurtleAnonymous rQyZjgRMPas encore d'évaluation
- Exercices Sur Python Turtle CORRIGEDocument7 pagesExercices Sur Python Turtle CORRIGEAnouar SghaierPas encore d'évaluation
- Les PolynomesDocument1 pageLes PolynomesYasser El hattabiPas encore d'évaluation
- 03 SlideDocument66 pages03 SlideYasser El hattabiPas encore d'évaluation
- TP12Document4 pagesTP12Yasser El hattabiPas encore d'évaluation
- Charge Par Induction de Véhicules ÉlectriquesDocument148 pagesCharge Par Induction de Véhicules ÉlectriquesYasser El hattabiPas encore d'évaluation
- TP Jeu de La VieDocument4 pagesTP Jeu de La VieYasser El hattabiPas encore d'évaluation
- Va2 Teodorescu Catalinstefan 30092013Document197 pagesVa2 Teodorescu Catalinstefan 30092013Yasser El hattabiPas encore d'évaluation
- 2-BOULENGUEZ PierreDocument2 pages2-BOULENGUEZ PierreYasser El hattabiPas encore d'évaluation
- Graphisme Tortue : Travaux PratiquesDocument7 pagesGraphisme Tortue : Travaux PratiquesYasser El hattabiPas encore d'évaluation
- Icmapeaz19 Paper 261Document9 pagesIcmapeaz19 Paper 261Yasser El hattabiPas encore d'évaluation
- Introduction Aux Listes: Travaux PratiquesDocument4 pagesIntroduction Aux Listes: Travaux PratiquesYasser El hattabiPas encore d'évaluation
- TP2 CorrigeDocument5 pagesTP2 CorrigeYasser El hattabiPas encore d'évaluation
- TP5 CorrigeDocument5 pagesTP5 CorrigeYasser El hattabiPas encore d'évaluation
- TP12 CorrigeDocument5 pagesTP12 CorrigeYasser El hattabiPas encore d'évaluation
- Cours - Chapitre 4 - Python Et Bases de DonnéesDocument3 pagesCours - Chapitre 4 - Python Et Bases de DonnéesYasser El hattabiPas encore d'évaluation
- Cours - Chapitre 3 - Langage SQLDocument12 pagesCours - Chapitre 3 - Langage SQLYasser El hattabiPas encore d'évaluation
- Calculs en Précision Arbitraire: Travaux PratiquesDocument3 pagesCalculs en Précision Arbitraire: Travaux PratiquesYasser El hattabiPas encore d'évaluation
- Cours - Chapitre 7 - Les ArbresDocument12 pagesCours - Chapitre 7 - Les ArbresYasser El hattabiPas encore d'évaluation
- Cours - Chapitre 6 - Complexité AlgorithmiqueDocument8 pagesCours - Chapitre 6 - Complexité AlgorithmiqueYasser El hattabiPas encore d'évaluation
- TP Jeu de La Vie - CorrigeDocument5 pagesTP Jeu de La Vie - CorrigeYasser El hattabiPas encore d'évaluation
- Cours - Chapitre 5 - Algorithmes de Tri AvancéDocument4 pagesCours - Chapitre 5 - Algorithmes de Tri AvancéYasser El hattabiPas encore d'évaluation
- Ds 1 MpsiDocument2 pagesDs 1 MpsiYasser El hattabiPas encore d'évaluation
- Cours - Chapitre 1 - Introduction Aux Bases de DonnéesDocument8 pagesCours - Chapitre 1 - Introduction Aux Bases de DonnéesYasser El hattabiPas encore d'évaluation
- Résume + Cours IPT MPDocument35 pagesRésume + Cours IPT MPYasser El hattabiPas encore d'évaluation
- Ds 3 MpsiDocument2 pagesDs 3 MpsiYasser El hattabiPas encore d'évaluation
- DM AnalyseDocument5 pagesDM AnalyseYasser El hattabiPas encore d'évaluation
- PDF Résumé - Aké, Les Années D'enfanceDocument8 pagesPDF Résumé - Aké, Les Années D'enfanceYasser El hattabi0% (2)
- Agot RPG Empty House SheetDocument3 pagesAgot RPG Empty House SheetRegibier YannPas encore d'évaluation
- C3 LesAffichesDesJODocument16 pagesC3 LesAffichesDesJOLAURENT JUNIOR KONANPas encore d'évaluation
- Cours ACLDocument2 pagesCours ACLBadr EddinePas encore d'évaluation
- Le Guide Des Eviers Vasques Et Lavabos OorekaDocument154 pagesLe Guide Des Eviers Vasques Et Lavabos Oorekahermann NtchankoPas encore d'évaluation
- Adam WinsklesDocument12 pagesAdam WinsklesKJJJJJJJJNMLKPas encore d'évaluation
- Seraphon Warscroll Skink Oracle On Troglodon FRDocument2 pagesSeraphon Warscroll Skink Oracle On Troglodon FRAenomel SimonPas encore d'évaluation
- Ue16.1 Eps 1 1Document11 pagesUe16.1 Eps 1 1Classe CarnotPas encore d'évaluation
- CV Thullier OphelieDocument3 pagesCV Thullier Opheliejordan haniquePas encore d'évaluation
- Liste Ufc Que Choisir Produit ContenusDocument3 pagesListe Ufc Que Choisir Produit ContenuschapocomPas encore d'évaluation
- DE7400 ManualDocument28 pagesDE7400 ManualMarisagarcia2014Pas encore d'évaluation
- 07 ProbasDocument5 pages07 ProbasOtmane LhmPas encore d'évaluation
- Apprentissage Par Le JeuDocument74 pagesApprentissage Par Le JeuFati ChahbounePas encore d'évaluation
- SPACE ART Bio FR PDFDocument15 pagesSPACE ART Bio FR PDFsolideo85Pas encore d'évaluation
- L'expositionDocument1 pageL'expositionheloisedeparisPas encore d'évaluation
- Sanyo PLV Z700Document60 pagesSanyo PLV Z700Grégory ClaeysPas encore d'évaluation
- Alexa Tarantino S EXPRESS JAZZ VOCAB Week 1 CDocument1 pageAlexa Tarantino S EXPRESS JAZZ VOCAB Week 1 CRodrigo EisingerPas encore d'évaluation
- Speedy Video CaptureDocument5 pagesSpeedy Video CaptureEliabe FerreiraPas encore d'évaluation
- Règlement Arearea Tatou - Saison 2Document7 pagesRèglement Arearea Tatou - Saison 2Sandira DerockPas encore d'évaluation
- La Condition Humaine Cours STMGDocument2 pagesLa Condition Humaine Cours STMGKUKIPas encore d'évaluation
- Randonnee Autour de Saint MorillonDocument4 pagesRandonnee Autour de Saint MorillondmathieuPas encore d'évaluation
- Portage en ÉcosseDocument3 pagesPortage en ÉcosseLara FarquharsonPas encore d'évaluation
- Lecture Linéaire 5Document6 pagesLecture Linéaire 5Vive100% (1)
- Niort Rencontre Shemale Ne Ou Sur Plains M'en VulgaireDocument1 pageNiort Rencontre Shemale Ne Ou Sur Plains M'en Vulgaireharmoniousances67Pas encore d'évaluation
- cm2 Exercices PonctuationDocument4 pagescm2 Exercices Ponctuationgueye.abdoukarimPas encore d'évaluation
- DHCP Sous LINUX PDFDocument7 pagesDHCP Sous LINUX PDFsalims00Pas encore d'évaluation
- FB AQVTsjd QOzv 8 GFDocument44 pagesFB AQVTsjd QOzv 8 GFmehdi.kachourPas encore d'évaluation
- U1S1CDocument6 pagesU1S1CDidier DamiensPas encore d'évaluation