Vous aimerez peut-être aussi
- Electromecanique Systemes Automatises PDFDocument113 pagesElectromecanique Systemes Automatises PDFSara Echeradi100% (2)
- Mecanique Des Fluides Approfondie PDFDocument76 pagesMecanique Des Fluides Approfondie PDFSara Echeradi83% (6)
- 8-Polynôme de Laguerre CorrectionDocument2 pages8-Polynôme de Laguerre CorrectionnounousPas encore d'évaluation
- Grands Classiques RéductionDocument21 pagesGrands Classiques Réductionbadre0% (1)
- Mesure Principale D Un Angle Oriente Corrige Serie D Exercices 3Document1 pageMesure Principale D Un Angle Oriente Corrige Serie D Exercices 3Sara EcheradiPas encore d'évaluation
- QUALIT2Document14 pagesQUALIT2Sara EcheradiPas encore d'évaluation
- Recrute Aiensem V2.Doc - AdministrateurDocument5 pagesRecrute Aiensem V2.Doc - AdministrateurSara EcheradiPas encore d'évaluation
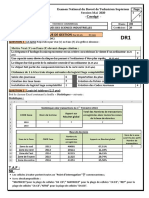
- Corrigé Examen Tsi 2020-1Document7 pagesCorrigé Examen Tsi 2020-1Sara EcheradiPas encore d'évaluation
- Epreuve TC 2019 - Corrigé SPDocument11 pagesEpreuve TC 2019 - Corrigé SPSara EcheradiPas encore d'évaluation
- Mouliste PDFDocument70 pagesMouliste PDFSara Echeradi0% (1)
- CoursDocument13 pagesCoursSara Echeradi100% (1)
- QUALIT2Document14 pagesQUALIT2Sara EcheradiPas encore d'évaluation
- Corrige 769 S Des Exercices Propose 769 S PDFDocument9 pagesCorrige 769 S Des Exercices Propose 769 S PDFSara EcheradiPas encore d'évaluation
- MMCWeb PDFDocument88 pagesMMCWeb PDFMeryem BerrPas encore d'évaluation
- Cahier Des Charges BranchementDocument12 pagesCahier Des Charges BranchementSara EcheradiPas encore d'évaluation
- Projet Catia Support de L'appareilDocument6 pagesProjet Catia Support de L'appareilSara EcheradiPas encore d'évaluation
- devoir-algebre-CERPAMAD-l1 2024Document2 pagesdevoir-algebre-CERPAMAD-l1 2024alexnikiema08Pas encore d'évaluation
- Chap1 Ex3Document1 pageChap1 Ex3OkePas encore d'évaluation
- CNC 1995 MP Maths 1 CorrigeDocument13 pagesCNC 1995 MP Maths 1 Corrigefbaraket48Pas encore d'évaluation
- 11.g.fiche Guide Ch1Document5 pages11.g.fiche Guide Ch1benjedidiachokriPas encore d'évaluation
- Ch1 Espaces AffinesDocument7 pagesCh1 Espaces Affinesalvismukalay6Pas encore d'évaluation
- Serie 1Document2 pagesSerie 1Aicha B'mhPas encore d'évaluation
- 0.1 G en Eralit Ees Sur Les FonctionsDocument7 pages0.1 G en Eralit Ees Sur Les Fonctionsapi-302372012Pas encore d'évaluation
- Examen National Mathematiques Sciences Maths 2018 Normale Corrige PDFDocument17 pagesExamen National Mathematiques Sciences Maths 2018 Normale Corrige PDFamirPas encore d'évaluation
- Cours Vecteurs Droites PDFDocument5 pagesCours Vecteurs Droites PDFsera docPas encore d'évaluation
- 03 Les Nombres RationnelsDocument14 pages03 Les Nombres RationnelsGoufi AoufPas encore d'évaluation
- Calcul de DeterminantDocument4 pagesCalcul de DeterminantMoad MalmiPas encore d'évaluation
- 27 Fractions Rationnelles CorrigeDocument11 pages27 Fractions Rationnelles CorrigeAnna christina KolandjianPas encore d'évaluation
- RepérageCartésien 2ndeSADocument4 pagesRepérageCartésien 2ndeSAAliou SECKPas encore d'évaluation
- Contrôle Continu Danalyse 1Document1 pageContrôle Continu Danalyse 1Nidhal CherratPas encore d'évaluation
- Devoir Surveillé 2: Exercice: ÉchauffementDocument9 pagesDevoir Surveillé 2: Exercice: ÉchauffementOsée MagloirePas encore d'évaluation
- Fiche Math Polynome Du Second DegréDocument14 pagesFiche Math Polynome Du Second DegréTamaru DialloPas encore d'évaluation
- Espaces PréhilbertienesDocument8 pagesEspaces PréhilbertienesAbdellatif ElouarratePas encore d'évaluation
- Arithmetique 2 Nombres Entiers Naturels Et OperationsDocument13 pagesArithmetique 2 Nombres Entiers Naturels Et OperationsOusmane DiopPas encore d'évaluation
- 01 - Vecteur Et Torseur en MecaniqueDocument12 pages01 - Vecteur Et Torseur en MecaniqueBelgacem Hamdi100% (1)
- Symboles MathematiquesDocument1 pageSymboles Mathematiquesscribe51Pas encore d'évaluation
- CoursTM1 PDFDocument60 pagesCoursTM1 PDFMohamed HachimiPas encore d'évaluation
- Chapitre 5 - Produit Scalaire Et Espaces EuclidiensDocument15 pagesChapitre 5 - Produit Scalaire Et Espaces EuclidiensjudosokhaldiPas encore d'évaluation
- Premiere S Valeur Absolue Fiche1Document6 pagesPremiere S Valeur Absolue Fiche1Akram FadelPas encore d'évaluation
- Marc-Aurèle Massard - Maths BCPST 1re Année (J'assure Aux Concours) (French Edition) - Dunod (2017)Document495 pagesMarc-Aurèle Massard - Maths BCPST 1re Année (J'assure Aux Concours) (French Edition) - Dunod (2017)Erick TetsadjioPas encore d'évaluation
- Bac Blanc Tle D 2023Document3 pagesBac Blanc Tle D 2023Noah AbdelPas encore d'évaluation
- Fonctions Linéaire Et AffineDocument1 pageFonctions Linéaire Et Affineakmelaboussou7Pas encore d'évaluation
- Applications LinéairesDocument19 pagesApplications LinéairesBakrim OumaimaPas encore d'évaluation
- TranscendantsDocument47 pagesTranscendantsimad.elrhair7Pas encore d'évaluation