Vous aimerez peut-être aussi
- Les Bus de TerrainDocument28 pagesLes Bus de TerrainaPas encore d'évaluation
- Réseaux Locaux Industriels: H JamouliDocument102 pagesRéseaux Locaux Industriels: H Jamouliscar lightPas encore d'évaluation
- Bcri CH1Document40 pagesBcri CH1Sàmi BmPas encore d'évaluation
- Bcri CH2Document33 pagesBcri CH2Sàmi BmPas encore d'évaluation
- PrésentationDocument8 pagesPrésentationmi doPas encore d'évaluation
- Chapitre 1Document53 pagesChapitre 1Jamila KrPas encore d'évaluation
- 04-Emd01-M2-Autmii-S2 - 17-18Document4 pages04-Emd01-M2-Autmii-S2 - 17-18Hamame Mohamed AminePas encore d'évaluation
- Le Bus AS-I PDFDocument6 pagesLe Bus AS-I PDFأمين زموPas encore d'évaluation
- Modbus TCP Pour AvisoxDocument3 pagesModbus TCP Pour AvisoxSOURAPas encore d'évaluation
- RLI ROI5 Cours1Document23 pagesRLI ROI5 Cours1Ulrich NDJIKIPas encore d'évaluation
- 04-Emd01 - M2-Autmii-Correct - S2 - 17-18Document6 pages04-Emd01 - M2-Autmii-Correct - S2 - 17-18Hamame Mohamed AminePas encore d'évaluation
- 04 Emd01 m2 Autmii s3!18!19 CorrectionDocument4 pages04 Emd01 m2 Autmii s3!18!19 CorrectionHamame Mohamed AminePas encore d'évaluation
- Bus Series LeCroy I2CDocument28 pagesBus Series LeCroy I2CDidier EnjauxPas encore d'évaluation
- TP Asi 2015Document5 pagesTP Asi 2015fatihaPas encore d'évaluation
- 04-Emd01-M2-Autmii-S3 - 18-19Document4 pages04-Emd01-M2-Autmii-S3 - 18-19Hamame Mohamed AminePas encore d'évaluation
- Cours ArduinoDocument100 pagesCours ArduinoAmil DhafPas encore d'évaluation
- PFE Commande de Niveau D'eauDocument17 pagesPFE Commande de Niveau D'eauCHOTTAPas encore d'évaluation
- TP01Document43 pagesTP01Pierre CornuPas encore d'évaluation
- Projet Systeme Hydraulique PDFDocument28 pagesProjet Systeme Hydraulique PDFSofiene Guedri100% (1)
- Tpn04 DiagDocument3 pagesTpn04 DiagAhmed Mehdi DALIPas encore d'évaluation
- Ch2 Modeles Pour Les SED Avec Supervision 2Document25 pagesCh2 Modeles Pour Les SED Avec Supervision 2ahlemsaadPas encore d'évaluation
- 04-Rattrap - M2-Autmii-S2 - 17-18Document2 pages04-Rattrap - M2-Autmii-S2 - 17-18Hamame Mohamed AminePas encore d'évaluation
- AS-i MaitreDocument14 pagesAS-i MaitreJose Luis Martinez MartinezPas encore d'évaluation
- Chapitre 4 Diag Generalites ProfDocument27 pagesChapitre 4 Diag Generalites ProfamalPas encore d'évaluation
- Chapitre2 Système de SupervisionDocument31 pagesChapitre2 Système de SupervisionTikhizi AmaniPas encore d'évaluation
- Mini Projet ASIDocument32 pagesMini Projet ASIfadoua.madarissePas encore d'évaluation
- TDN° 2 - Représentation - ÉtatsDocument1 pageTDN° 2 - Représentation - Étatslasri lasriPas encore d'évaluation
- 04-Rattrap - M2-Autmii-Correct - S2 - 17-18Document4 pages04-Rattrap - M2-Autmii-Correct - S2 - 17-18Hamame Mohamed Amine100% (1)
- Diagnostic Et Contrôle Des Systèmes Industriels: A KhedherDocument48 pagesDiagnostic Et Contrôle Des Systèmes Industriels: A KhedherFiras HajriPas encore d'évaluation
- TP4 de L'Instrumentation 1Document14 pagesTP4 de L'Instrumentation 1Med HaitamPas encore d'évaluation
- 00 - Introduction SupervisionDocument8 pages00 - Introduction SupervisionHamame Mohamed Amine100% (1)
- Bus CanDocument31 pagesBus CanlaabissiPas encore d'évaluation
- Ait Elmaalem - HistoriqueDocument6 pagesAit Elmaalem - HistoriqueCherry CandyPas encore d'évaluation
- Supervison Porte GarageDocument9 pagesSupervison Porte GarageAIIPas encore d'évaluation
- Guide Securite Industrielle Version Finale-2Document40 pagesGuide Securite Industrielle Version Finale-2qmichaudPas encore d'évaluation
- MODEBUS1Document3 pagesMODEBUS1Youssra RamiPas encore d'évaluation
- Chapitre 1Document5 pagesChapitre 1youssef BohaPas encore d'évaluation
- Les Bus Asi (Enregistrement Automatique)Document14 pagesLes Bus Asi (Enregistrement Automatique)Heni REBHIPas encore d'évaluation
- Automate A Etat FiniDocument22 pagesAutomate A Etat FiniChai MaPas encore d'évaluation
- Chapitre1 Introduction A La SupervisionDocument40 pagesChapitre1 Introduction A La SupervisionTikhizi AmaniPas encore d'évaluation
- Chapitre IDocument6 pagesChapitre Isociété ettrisiti oulad faresPas encore d'évaluation
- Labview Une Plateforme Pour La Mise en Oeuvre Dun TP de Supervision Par Protocole Modbustcp Dune Application AutomateDocument5 pagesLabview Une Plateforme Pour La Mise en Oeuvre Dun TP de Supervision Par Protocole Modbustcp Dune Application AutomateDieguin Francis Ck TeranPas encore d'évaluation
- Système À Évènements Discrets Système À Évènements Discrets: Faculté de TechnologieDocument107 pagesSystème À Évènements Discrets Système À Évènements Discrets: Faculté de TechnologieLem AhPas encore d'évaluation
- Cours Diagnostic1Document19 pagesCours Diagnostic1BilelPas encore d'évaluation
- Chapitre1 Notionsde Base 2020Document44 pagesChapitre1 Notionsde Base 2020Med BahaPas encore d'évaluation
- Application de Reseau de Petri Madame SamehDocument20 pagesApplication de Reseau de Petri Madame SamehSliim AmiriPas encore d'évaluation
- Scada 2009Document51 pagesScada 2009LAHKIM FATIMA-ZAHRAEPas encore d'évaluation
- Chapitre 1 SEDDocument40 pagesChapitre 1 SEDfaissal rahliPas encore d'évaluation
- Système Numérique de ContrôleDocument4 pagesSystème Numérique de ContrôleHassen LazharPas encore d'évaluation
- Labview Une Plateforme Pour La Mise en Oeuvre Des TP Sur Les Bus de Terrains IndustrielsDocument7 pagesLabview Une Plateforme Pour La Mise en Oeuvre Des TP Sur Les Bus de Terrains IndustrielsWalidAdrarPas encore d'évaluation
- Cours LabVIEW ExtraitDocument174 pagesCours LabVIEW ExtraitmanarPas encore d'évaluation
- Busi2c EnsamDocument28 pagesBusi2c EnsamIsmail KlilaPas encore d'évaluation
- Automatisation Et Supervision D'Une Turbine Centrifugeuse de L'Entreprise CEVITALDocument94 pagesAutomatisation Et Supervision D'Une Turbine Centrifugeuse de L'Entreprise CEVITALLAACISSE ABDERAHMANEPas encore d'évaluation
- TP N°2 CorrectionDocument12 pagesTP N°2 CorrectionAbdou Kimm BinPas encore d'évaluation
- Ch2 Modeles Pour Les SED Avec Supervision 2Document25 pagesCh2 Modeles Pour Les SED Avec Supervision 2milanoramoPas encore d'évaluation
- Cours Temps Réel Chap2 Arti2 V EtudiantsDocument21 pagesCours Temps Réel Chap2 Arti2 V EtudiantsRãẻd khắtẻrchiPas encore d'évaluation
- POLY BOUAMAMA EEA Supervision PDFDocument133 pagesPOLY BOUAMAMA EEA Supervision PDFAdyX2Pas encore d'évaluation
- 6 Exercices SEDDocument17 pages6 Exercices SEDPoupée De SoiePas encore d'évaluation
- 4-3-LE BUS AS-iDocument14 pages4-3-LE BUS AS-ifidele brouPas encore d'évaluation
- Exercices Rli 1Document7 pagesExercices Rli 1alex bbapPas encore d'évaluation
- Comparaison Incinération Et AutresDocument15 pagesComparaison Incinération Et Autresalex bbapPas encore d'évaluation
- 3145-141021-Minsante AffectationsDocument14 pages3145-141021-Minsante Affectationsalex bbapPas encore d'évaluation
- REALITES N°589 (20 Decembre 2021)Document12 pagesREALITES N°589 (20 Decembre 2021)alex bbapPas encore d'évaluation
- FR ANNEXE CONCOURS MINSANTE-2022Document21 pagesFR ANNEXE CONCOURS MINSANTE-2022alex bbapPas encore d'évaluation
- Utilisation Des Entrees Du Port ParalleleDocument15 pagesUtilisation Des Entrees Du Port Parallelealex bbapPas encore d'évaluation
- Pages Extraites MAINTENANCE ET CONTROLE QUALITE-2-MAB2Document14 pagesPages Extraites MAINTENANCE ET CONTROLE QUALITE-2-MAB2alex bbapPas encore d'évaluation
- Emploi de Temps de La Semaine 15 Au 21 Juillet 2019Document1 pageEmploi de Temps de La Semaine 15 Au 21 Juillet 2019alex bbapPas encore d'évaluation
- Fiche DnsDocument2 pagesFiche Dnsalex bbapPas encore d'évaluation
- Exercices Rli 1Document7 pagesExercices Rli 1alex bbapPas encore d'évaluation
- Grand Stage Aikido - Douala - 3 - BisDocument1 pageGrand Stage Aikido - Douala - 3 - Bisalex bbapPas encore d'évaluation
- Avenir CamerounDocument10 pagesAvenir Camerounalex bbapPas encore d'évaluation
- EMPLOI DE TEMPS DE LA SEMAINE 17 AU 23 JUIN 2019 AdditifDocument2 pagesEMPLOI DE TEMPS DE LA SEMAINE 17 AU 23 JUIN 2019 Additifalex bbapPas encore d'évaluation
- etudeDeCas 2Document15 pagesetudeDeCas 2alex bbapPas encore d'évaluation
- Le Quotidien #702Document12 pagesLe Quotidien #702alex bbapPas encore d'évaluation
- Travaux Diriges CEM 2019Document6 pagesTravaux Diriges CEM 2019alex bbapPas encore d'évaluation
- Programme Thérèse SOLEDocument4 pagesProgramme Thérèse SOLEalex bbapPas encore d'évaluation
- Le Quotidien #933Document12 pagesLe Quotidien #933alex bbapPas encore d'évaluation
- Point Du Jour Covid-19 27 MarsDocument3 pagesPoint Du Jour Covid-19 27 Marsalex bbapPas encore d'évaluation
- Le Quotidien #855 (Édition Spéciale)Document12 pagesLe Quotidien #855 (Édition Spéciale)alex bbapPas encore d'évaluation
- Port Parallèle Pia 8255Document11 pagesPort Parallèle Pia 8255alex bbapPas encore d'évaluation
- Postes de Sécurité Microbiologique Postes de Sécurité CytotoxiqueDocument6 pagesPostes de Sécurité Microbiologique Postes de Sécurité Cytotoxiquealex bbapPas encore d'évaluation
- Le Quotidien #854Document12 pagesLe Quotidien #854alex bbapPas encore d'évaluation
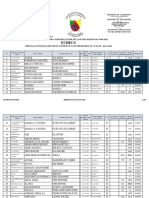
- Echecs Yaounde 04-08-2018Document28 pagesEchecs Yaounde 04-08-2018alex bbapPas encore d'évaluation
- Programme Master GEIIDocument2 pagesProgramme Master GEIIalex bbapPas encore d'évaluation
- TP 2018 OrdiDocument2 pagesTP 2018 Ordialex bbapPas encore d'évaluation
- 40 Eleves Cycle A Division Des RF 2019 - fr-1Document11 pages40 Eleves Cycle A Division Des RF 2019 - fr-1alex bbapPas encore d'évaluation
- Programme KyuDocument13 pagesProgramme Kyualex bbapPas encore d'évaluation
- Cours de Cem Geii-2-2019Document68 pagesCours de Cem Geii-2-2019alex bbapPas encore d'évaluation
- Manuel Lab - BCHDocument21 pagesManuel Lab - BCHGiuffridaPas encore d'évaluation
- MON CV Daouda SowDocument1 pageMON CV Daouda SowDaouda SowPas encore d'évaluation
- Chapitre 1 - Principes de La VirtualisationDocument41 pagesChapitre 1 - Principes de La VirtualisationrosePas encore d'évaluation
- La Théorie Des ArbresDocument9 pagesLa Théorie Des Arbrescataxos384Pas encore d'évaluation
- Management (2) 1Document13 pagesManagement (2) 1HAKĪ MAPas encore d'évaluation
- SpéP - TD2 - BouclesDocument2 pagesSpéP - TD2 - BouclesRayane HmzPas encore d'évaluation
- OrigalysDocument4 pagesOrigalysfatima azalmadPas encore d'évaluation
- Citroën Berlingo 2015 - Communiqué de PresseDocument13 pagesCitroën Berlingo 2015 - Communiqué de PressegiugiuPas encore d'évaluation
- 03-Terminaux Et Commandes de Base PDFDocument40 pages03-Terminaux Et Commandes de Base PDFkhaledPas encore d'évaluation
- TD4 EtuDocument20 pagesTD4 EtuNada RafikPas encore d'évaluation
- Gianlea 375Document3 pagesGianlea 375Andry Ny Aina LightPas encore d'évaluation
- Chapitre 1Document26 pagesChapitre 1RodriguePas encore d'évaluation
- 21 SeptembreDocument34 pages21 SeptembreProfesseur De MATHSPas encore d'évaluation
- 23-Géométrie-Des-Trains-Roulants - CopieDocument18 pages23-Géométrie-Des-Trains-Roulants - CopieClément GuérinPas encore d'évaluation
- MALIKA MyalDocument82 pagesMALIKA MyalNoureddine Amagour100% (1)
- Mooc s5 4Document10 pagesMooc s5 4mobio jeanPas encore d'évaluation
- 1.1 Programme - Apprendre A Travailler en Mode HybrideDocument2 pages1.1 Programme - Apprendre A Travailler en Mode HybrideFrédérique GauthierPas encore d'évaluation
- 29-Déploiement Des Serveurs Et Postes de Travail-Créer Et DéployerDocument15 pages29-Déploiement Des Serveurs Et Postes de Travail-Créer Et DéployerYoussef AddiPas encore d'évaluation
- Rapport VfinalDocument68 pagesRapport VfinalMahrane AIDIPas encore d'évaluation
- RapportDocument53 pagesRapportmarcel kouassiPas encore d'évaluation
- GPME Communication Chap02 CorrigeDocument8 pagesGPME Communication Chap02 CorrigeThomBlioPas encore d'évaluation
- TP2 Redressement Et FiltrageDocument7 pagesTP2 Redressement Et FiltrageBouzidi MontassarPas encore d'évaluation
- GERE02 Plan de Formation (Novembre 2020) PDFDocument4 pagesGERE02 Plan de Formation (Novembre 2020) PDFTeslem MbPas encore d'évaluation
- ContexteDocument2 pagesContextehibaouafi502Pas encore d'évaluation
- 2023-Exercices - Corriges - Diagramme GANTT CopieDocument23 pages2023-Exercices - Corriges - Diagramme GANTT CopieshanenordonnePas encore d'évaluation
- La Guerre Des Mã©taux Rares La Face Cachã©e de La Transition énergétique Et Numã©rique by Guillaume PitronDocument201 pagesLa Guerre Des Mã©taux Rares La Face Cachã©e de La Transition énergétique Et Numã©rique by Guillaume PitronMadeleine NdioroPas encore d'évaluation
- EMD INg Corrosion 2021Document3 pagesEMD INg Corrosion 2021Bichou Derres100% (2)
- 10.4.4 Lab - Build A Switch and Router NetworkDocument7 pages10.4.4 Lab - Build A Switch and Router NetworkPape FayePas encore d'évaluation
- Plaquette CRPDocument21 pagesPlaquette CRPLucien LOPas encore d'évaluation
- Help SystemeDocument9 pagesHelp SystemeMoad TarifiPas encore d'évaluation
- Apprendre Python rapidement: Le guide du débutant pour apprendre tout ce que vous devez savoir sur Python, même si vous êtes nouveau dans la programmationD'EverandApprendre Python rapidement: Le guide du débutant pour apprendre tout ce que vous devez savoir sur Python, même si vous êtes nouveau dans la programmationPas encore d'évaluation
- Hacking pour débutant Le guide ultime du débutant pour apprendre les bases du hacking avec Kali Linux et comment se protéger des hackersD'EverandHacking pour débutant Le guide ultime du débutant pour apprendre les bases du hacking avec Kali Linux et comment se protéger des hackersPas encore d'évaluation
- Technologie automobile: Les Grands Articles d'UniversalisD'EverandTechnologie automobile: Les Grands Articles d'UniversalisPas encore d'évaluation
- Secrets du Marketing des Médias Sociaux 2021: Conseils et Stratégies Extrêmement Efficaces votre Facebook (Stimulez votre Engagement et Gagnez des Clients Fidèles)D'EverandSecrets du Marketing des Médias Sociaux 2021: Conseils et Stratégies Extrêmement Efficaces votre Facebook (Stimulez votre Engagement et Gagnez des Clients Fidèles)Évaluation : 4 sur 5 étoiles4/5 (2)
- Le guide du hacker : le guide simplifié du débutant pour apprendre les bases du hacking avec Kali LinuxD'EverandLe guide du hacker : le guide simplifié du débutant pour apprendre les bases du hacking avec Kali LinuxÉvaluation : 5 sur 5 étoiles5/5 (2)
- Revue des incompris revue d'histoire des oubliettes: Le Réveil de l'Horloge de Célestin Louis Maxime Dubuisson aliéniste et poèteD'EverandRevue des incompris revue d'histoire des oubliettes: Le Réveil de l'Horloge de Célestin Louis Maxime Dubuisson aliéniste et poèteÉvaluation : 3 sur 5 étoiles3/5 (3)
- Kali Linux pour débutant : Le guide ultime du débutant pour apprendre les bases de Kali Linux.D'EverandKali Linux pour débutant : Le guide ultime du débutant pour apprendre les bases de Kali Linux.Évaluation : 5 sur 5 étoiles5/5 (1)
- Guide Pour Les Débutants En Matière De Piratage Informatique: Comment Pirater Un Réseau Sans Fil, Sécurité De Base Et Test De Pénétration, Kali LinuxD'EverandGuide Pour Les Débutants En Matière De Piratage Informatique: Comment Pirater Un Réseau Sans Fil, Sécurité De Base Et Test De Pénétration, Kali LinuxÉvaluation : 1 sur 5 étoiles1/5 (1)
- Wi-Fi Hacking avec kali linux Guide étape par étape : apprenez à pénétrer les réseaux Wifi et les meilleures stratégies pour les sécuriserD'EverandWi-Fi Hacking avec kali linux Guide étape par étape : apprenez à pénétrer les réseaux Wifi et les meilleures stratégies pour les sécuriserPas encore d'évaluation
- Le plan marketing en 4 étapes: Stratégies et étapes clés pour créer des plans de marketing qui fonctionnentD'EverandLe plan marketing en 4 étapes: Stratégies et étapes clés pour créer des plans de marketing qui fonctionnentPas encore d'évaluation
- Dark Python : Apprenez à créer vos outils de hacking.D'EverandDark Python : Apprenez à créer vos outils de hacking.Évaluation : 3 sur 5 étoiles3/5 (1)
- L'analyse fondamentale facile à apprendre: Le guide d'introduction aux techniques et stratégies d'analyse fondamentale pour anticiper les événements qui font bouger les marchésD'EverandL'analyse fondamentale facile à apprendre: Le guide d'introduction aux techniques et stratégies d'analyse fondamentale pour anticiper les événements qui font bouger les marchésÉvaluation : 3.5 sur 5 étoiles3.5/5 (4)
- Python | Programmer pas à pas: Le guide du débutant pour une initiation simple & rapide à la programmationD'EverandPython | Programmer pas à pas: Le guide du débutant pour une initiation simple & rapide à la programmationPas encore d'évaluation
- WiFi Hacking : Le guide simplifié du débutant pour apprendre le hacking des réseaux WiFi avec Kali LinuxD'EverandWiFi Hacking : Le guide simplifié du débutant pour apprendre le hacking des réseaux WiFi avec Kali LinuxÉvaluation : 3 sur 5 étoiles3/5 (1)
- Le Guide Rapide Du Cloud Computing Et De La CybersécuritéD'EverandLe Guide Rapide Du Cloud Computing Et De La CybersécuritéPas encore d'évaluation
- Wireshark pour les débutants : Le guide ultime du débutant pour apprendre les bases de l’analyse réseau avec Wireshark.D'EverandWireshark pour les débutants : Le guide ultime du débutant pour apprendre les bases de l’analyse réseau avec Wireshark.Pas encore d'évaluation
- Le guide pratique du hacker dans les tests d’intrusion IoT : Le livre indispensable pour identifiez les vulnérabilités et sécurisez vos objets intelligentsD'EverandLe guide pratique du hacker dans les tests d’intrusion IoT : Le livre indispensable pour identifiez les vulnérabilités et sécurisez vos objets intelligentsPas encore d'évaluation
- Le trading en ligne facile à apprendre: Comment devenir un trader en ligne et apprendre à investir avec succèsD'EverandLe trading en ligne facile à apprendre: Comment devenir un trader en ligne et apprendre à investir avec succèsÉvaluation : 3.5 sur 5 étoiles3.5/5 (19)
- L'analyse technique facile à apprendre: Comment construire et interpréter des graphiques d'analyse technique pour améliorer votre activité de trading en ligne.D'EverandL'analyse technique facile à apprendre: Comment construire et interpréter des graphiques d'analyse technique pour améliorer votre activité de trading en ligne.Évaluation : 3.5 sur 5 étoiles3.5/5 (6)
- Le Bon Accord avec le Bon Fournisseur: Comment Mobiliser Toute la Puissance de vos Partenaires Commerciaux pour Réaliser vos ObjectifsD'EverandLe Bon Accord avec le Bon Fournisseur: Comment Mobiliser Toute la Puissance de vos Partenaires Commerciaux pour Réaliser vos ObjectifsÉvaluation : 4 sur 5 étoiles4/5 (2)
- Hacking pour débutants : Le guide complet du débutant pour apprendre les bases du hacking avec Kali LinuxD'EverandHacking pour débutants : Le guide complet du débutant pour apprendre les bases du hacking avec Kali LinuxÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- Dans l'esprit des grand investisseurs: Un voyage à la découverte de la psychologie utilisée par les plus grands investisseurs de tous les temps à travers des analyses opérationnellD'EverandDans l'esprit des grand investisseurs: Un voyage à la découverte de la psychologie utilisée par les plus grands investisseurs de tous les temps à travers des analyses opérationnellÉvaluation : 4.5 sur 5 étoiles4.5/5 (3)
- Python Offensif : Le guide du débutant pour apprendre les bases du langage Python et créer des outils de hacking.D'EverandPython Offensif : Le guide du débutant pour apprendre les bases du langage Python et créer des outils de hacking.Pas encore d'évaluation
- La psychologie du trading facile à apprendre: Comment appliquer les stratégies et les attitudes psychologiques des traders gagnants pour réussir dans le trading.D'EverandLa psychologie du trading facile à apprendre: Comment appliquer les stratégies et les attitudes psychologiques des traders gagnants pour réussir dans le trading.Évaluation : 4 sur 5 étoiles4/5 (2)
- Python pour les hackers : Le guide des script kiddies : apprenez à créer vos propres outils de hackingD'EverandPython pour les hackers : Le guide des script kiddies : apprenez à créer vos propres outils de hackingÉvaluation : 5 sur 5 étoiles5/5 (1)
- Gestion de projet : outils pour la vie quotidienneD'EverandGestion de projet : outils pour la vie quotidienneÉvaluation : 5 sur 5 étoiles5/5 (2)