Vous aimerez peut-être aussi
- Anal-données-M1-CORRELATION ET REGRESSION LINEAIREDocument7 pagesAnal-données-M1-CORRELATION ET REGRESSION LINEAIREPatrice Kengne100% (1)
- HétéroscédasticitéDocument4 pagesHétéroscédasticitéEl KawtarPas encore d'évaluation
- Questions Reponse EconometrieDocument9 pagesQuestions Reponse EconometrieKwon JiyongPas encore d'évaluation
- Cours Des Tests Paramétriques 14102023 - 231014 - 084213Document37 pagesCours Des Tests Paramétriques 14102023 - 231014 - 084213Prodige BoliPas encore d'évaluation
- Correction TD - Statistique - Inferentielle - 1 - 2021 - 2022. Ligue Des EconomistesDocument18 pagesCorrection TD - Statistique - Inferentielle - 1 - 2021 - 2022. Ligue Des EconomistesOrnel DJEUDJI NGASSAMPas encore d'évaluation
- TestDocument12 pagesTestLoudjeinePas encore d'évaluation
- Estimation Par Intervalle de ConfianceDocument8 pagesEstimation Par Intervalle de ConfianceMohammed-Yassine Barnicha100% (1)
- COURS Intro ROBUSTESSE Revised PDFDocument25 pagesCOURS Intro ROBUSTESSE Revised PDFIrankunda FaustinPas encore d'évaluation
- Chapitre 1Document12 pagesChapitre 1farrahsirinePas encore d'évaluation
- 505 506 - Charpentier Flachaire Ly - ComplementDocument27 pages505 506 - Charpentier Flachaire Ly - ComplementDio TimaPas encore d'évaluation
- Solution de TD 10 Test de Khe Deux 2Document16 pagesSolution de TD 10 Test de Khe Deux 2Mhamoud AbdiPas encore d'évaluation
- TD 3Document5 pagesTD 3taikyousseflogfrPas encore d'évaluation
- Modélisation Des Montants de Sinistres Et Des Fréquences de SinistresDocument44 pagesModélisation Des Montants de Sinistres Et Des Fréquences de SinistresAmira Lya100% (6)
- Physique Statistique Chap. IDocument7 pagesPhysique Statistique Chap. IbayouPas encore d'évaluation
- Chapitre1 Estimation Partie1 1Document27 pagesChapitre1 Estimation Partie1 1ZALOUK LOUBNAPas encore d'évaluation
- Régression Logistique Et Classification BinaireDocument17 pagesRégression Logistique Et Classification Binaireahmed tahraouiPas encore d'évaluation
- Cours de Phys Stat S5 19 - 20Document63 pagesCours de Phys Stat S5 19 - 20Samahi Fatima ZahraPas encore d'évaluation
- Série N°3 TD Ech Et EstDocument1 pageSérie N°3 TD Ech Et EstImad EnnejjariPas encore d'évaluation
- Maintenance Et FiabilitéDocument100 pagesMaintenance Et FiabilitéMelhyas KPLEPas encore d'évaluation
- Chapitre2 S3 21 22 EstimationDocument42 pagesChapitre2 S3 21 22 EstimationHayat MalkiPas encore d'évaluation
- TP-calculs-des-incertitudes 2324 1 1Document8 pagesTP-calculs-des-incertitudes 2324 1 1Liza BoutellisPas encore d'évaluation
- Polycope TP S2 Physique 2 23 24Document26 pagesPolycope TP S2 Physique 2 23 24Aboulhouda HatubPas encore d'évaluation
- Analyse de Régression LinéaireDocument12 pagesAnalyse de Régression LinéairekarimPas encore d'évaluation
- Resume Stat-1Document7 pagesResume Stat-1amourPas encore d'évaluation
- Mathématiques 1: 4 Heures Calculatrice AutoriséeDocument4 pagesMathématiques 1: 4 Heures Calculatrice AutoriséeSoufiane MoustakbalPas encore d'évaluation
- Chap 3Document6 pagesChap 3the JockerPas encore d'évaluation
- Manuel TP PHYS LSI 2023Document45 pagesManuel TP PHYS LSI 2023Adson DjogapPas encore d'évaluation
- Chapitre EchantillonnageDocument2 pagesChapitre EchantillonnageOussama McPas encore d'évaluation
- AnumII-Ch5 EqNumDocument13 pagesAnumII-Ch5 EqNumJean Jacques Atemengue ZamePas encore d'évaluation
- 1 EAD RévisionDocument40 pages1 EAD Révisionomaima saadPas encore d'évaluation
- Universite Mohammed V Rabat Faculte Des Sciences Juridiques, Economiques Et Sociales Rabat AgdalDocument23 pagesUniversite Mohammed V Rabat Faculte Des Sciences Juridiques, Economiques Et Sociales Rabat AgdalHamza BennisPas encore d'évaluation
- Chapitre1 ProbabilitéDocument53 pagesChapitre1 Probabilitésafaa zeganPas encore d'évaluation
- MetrologieDocument102 pagesMetrologieFatiha BazharPas encore d'évaluation
- Calcul D'erreur Dans La Mesure Des IncertitudesDocument4 pagesCalcul D'erreur Dans La Mesure Des IncertitudesIsaacar Moye la SouzaPas encore d'évaluation
- Notion D'erreurs en PhysiqueDocument10 pagesNotion D'erreurs en PhysiqueBertin YoudomPas encore d'évaluation
- Chapitre 1Document4 pagesChapitre 1Zakaria Ghrissi alouiPas encore d'évaluation
- Mco S8Document10 pagesMco S8Chakib BenmhamedPas encore d'évaluation
- Mécanique Quantique RelativisteDocument41 pagesMécanique Quantique RelativisteNathalie DeberghPas encore d'évaluation
- Cours MMC7Document12 pagesCours MMC7Mounir KrkPas encore d'évaluation
- Chapitre 2 ProbabiliteDocument23 pagesChapitre 2 ProbabiliteWilfried MichouPas encore d'évaluation
- EchantillonageDocument8 pagesEchantillonageJulie MarsaultPas encore d'évaluation
- Les IncertitudesDocument18 pagesLes IncertitudesNassi MaPas encore d'évaluation
- MMC v1 FinalDocument60 pagesMMC v1 FinalPierre FournierPas encore d'évaluation
- ANAL DONNEES KHI2 AJUSTEMENT HNDAMEM Master1Document4 pagesANAL DONNEES KHI2 AJUSTEMENT HNDAMEM Master1Patrice KengnePas encore d'évaluation
- Chim - Théo - Chap IIIDocument20 pagesChim - Théo - Chap IIIaitmoussayassine97Pas encore d'évaluation
- Indicateurs de FormeDocument3 pagesIndicateurs de FormeWaSiMBPas encore d'évaluation
- Suite Chapitre Méthode Maximum VraisemblanceDocument9 pagesSuite Chapitre Méthode Maximum VraisemblanceMouf SidPas encore d'évaluation
- Chap 3 Probabilités Cours1 Et 2Document25 pagesChap 3 Probabilités Cours1 Et 2Matin CalmePas encore d'évaluation
- Chap 3 Probabilités Cours1Document13 pagesChap 3 Probabilités Cours1Matin CalmePas encore d'évaluation
- Corrigé Examen de Remplacement PST (L3) 22 Féveier 2022Document3 pagesCorrigé Examen de Remplacement PST (L3) 22 Féveier 2022mayar mimiPas encore d'évaluation
- EstimationDocument10 pagesEstimationJunior AdyaPas encore d'évaluation
- CT TP - Mesures-IncertitudesDocument12 pagesCT TP - Mesures-IncertitudesPatrick NgakouPas encore d'évaluation
- Chapitre 2 - ESPACES PROBABILISESDocument11 pagesChapitre 2 - ESPACES PROBABILISESabdelmahamoud fatahadjalil NASSOURPas encore d'évaluation
- L'ntégration NumériqueDocument5 pagesL'ntégration NumériqueNasser TALL BOUBACARPas encore d'évaluation
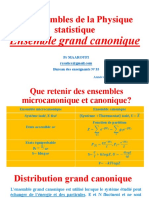
- Ensemble Grand CanoniqueDocument11 pagesEnsemble Grand CanoniqueMouna FgPas encore d'évaluation
- EMD + Corrigé de Maths 1 SM 2016 - Université de BoumerdesDocument8 pagesEMD + Corrigé de Maths 1 SM 2016 - Université de BoumerdesRyuKPas encore d'évaluation
- Chapitre 3 - Estimation Statitique V 08-02-2023Document51 pagesChapitre 3 - Estimation Statitique V 08-02-2023Mariam GueyePas encore d'évaluation
- Chapitre3 Résolution Numérique Des Équations Non LinéairesDocument8 pagesChapitre3 Résolution Numérique Des Équations Non LinéairesMelakhessou KaoutherPas encore d'évaluation
- CreadDocument11 pagesCreadAhmed FenneurPas encore d'évaluation
- Benhaoued - MaissaDocument44 pagesBenhaoued - MaissaAhmed FenneurPas encore d'évaluation
- Pratique D'auto-Évaluation de La Qualité Dans L'enseignement Supérieur en AlgérieDocument20 pagesPratique D'auto-Évaluation de La Qualité Dans L'enseignement Supérieur en AlgérieAhmed FenneurPas encore d'évaluation
- Ouala Samira (Analyse Statistique Des Durées de Chomage)Document113 pagesOuala Samira (Analyse Statistique Des Durées de Chomage)Ahmed FenneurPas encore d'évaluation
- Faculté Des Sciences Département de MathématiquesDocument56 pagesFaculté Des Sciences Département de MathématiquesAhmed FenneurPas encore d'évaluation
- BERKANI - Fatiha PDFDocument74 pagesBERKANI - Fatiha PDFAhmed FenneurPas encore d'évaluation
- Imecaoudene, KahinaDocument73 pagesImecaoudene, KahinaAhmed FenneurPas encore d'évaluation
- Bencheikh SamiaDocument47 pagesBencheikh SamiaAhmed FenneurPas encore d'évaluation
- Blandin Vassili 2013 CorrDocument133 pagesBlandin Vassili 2013 CorrAhmed FenneurPas encore d'évaluation
- Ait Youcef, MalhaDocument70 pagesAit Youcef, MalhaAhmed FenneurPas encore d'évaluation
- GOUAL-Hafida 2Document120 pagesGOUAL-Hafida 2Ahmed FenneurPas encore d'évaluation
- Ahmed Hamimes Rachid Benamirouche: Auteur CorrespondantDocument16 pagesAhmed Hamimes Rachid Benamirouche: Auteur CorrespondantAhmed FenneurPas encore d'évaluation
- ExamBayes 20132014 ALL CORDocument8 pagesExamBayes 20132014 ALL CORAhmed FenneurPas encore d'évaluation
- L3eco Sad3 TD1 1920Document4 pagesL3eco Sad3 TD1 1920Ahmed FenneurPas encore d'évaluation
- Modelisation Stochastique Des Provisions Techniques en Assurance Non-Vie Kerdali Abida LATRECHE AbdelouahabDocument20 pagesModelisation Stochastique Des Provisions Techniques en Assurance Non-Vie Kerdali Abida LATRECHE AbdelouahabAhmed FenneurPas encore d'évaluation
- Corr 10 Devoir 2Document7 pagesCorr 10 Devoir 2Ahmed FenneurPas encore d'évaluation
- Le Système D'information Et de Communication Territorial Comme Facteur Déterminant Pour La Transition Énergétique en AlgérieDocument8 pagesLe Système D'information Et de Communication Territorial Comme Facteur Déterminant Pour La Transition Énergétique en AlgérieAhmed FenneurPas encore d'évaluation
- Reçu Le 2018-02-19 Accepté Le 2018-04-05 Publié en Ligne Le 2018-06-01Document10 pagesReçu Le 2018-02-19 Accepté Le 2018-04-05 Publié en Ligne Le 2018-06-01Ahmed FenneurPas encore d'évaluation
- Devoir de Synthèse N°2 - Math - 1ère AS (2009-2010) MR Abdessatar El FalehDocument2 pagesDevoir de Synthèse N°2 - Math - 1ère AS (2009-2010) MR Abdessatar El FalehHazovic SpacePas encore d'évaluation
- Cours 06 Équations DifférentiellesDocument90 pagesCours 06 Équations DifférentiellesYassine BoutahirPas encore d'évaluation
- Formulaire MMCDocument4 pagesFormulaire MMCazzamPas encore d'évaluation
- Chapitre 2 - Problemes D Optimisation Sous Contraintes Papier 07-02-2021Document19 pagesChapitre 2 - Problemes D Optimisation Sous Contraintes Papier 07-02-2021Mourad sassanePas encore d'évaluation
- Cours TreillisDocument19 pagesCours Treillisaziz gbedourorouPas encore d'évaluation
- Ch1CSSMA5 PDFDocument13 pagesCh1CSSMA5 PDFAalae GoudalPas encore d'évaluation
- Algebre Bilineaire - Cours PDFDocument91 pagesAlgebre Bilineaire - Cours PDFSerigne Saliou GayePas encore d'évaluation
- These Doctorat Observability PDFDocument181 pagesThese Doctorat Observability PDFmouna abdelhakPas encore d'évaluation
- Programme Du Module Math 1Document3 pagesProgramme Du Module Math 1Yacine BEPas encore d'évaluation
- Chap 1 Proportions Et Evolution en Pourcentage Cours A TrousDocument4 pagesChap 1 Proportions Et Evolution en Pourcentage Cours A TrousLAYNA LAYNAPas encore d'évaluation
- PHY321@Chapitre0 Rappels AlgebreV2309Document42 pagesPHY321@Chapitre0 Rappels AlgebreV2309ondoua michelPas encore d'évaluation
- Cours Integration PDFDocument22 pagesCours Integration PDFAhmed fattoumPas encore d'évaluation
- Cours Mef UnstimDocument69 pagesCours Mef UnstimTOVIHO SessinouPas encore d'évaluation
- TD Revision CC1 SolutionsDocument2 pagesTD Revision CC1 SolutionsfokamPas encore d'évaluation
- Elec Num & AutomatismeDocument526 pagesElec Num & Automatismehatam.aoudainaPas encore d'évaluation
- 4e - Maths Leçon 7 Equations - InequationsDocument12 pages4e - Maths Leçon 7 Equations - InequationsSabirou BAPARAPEPas encore d'évaluation
- Module 3Document48 pagesModule 3Abdel FrystPas encore d'évaluation
- Auto 0Document141 pagesAuto 0omayma omaPas encore d'évaluation
- Cours1 3eme 2021 2022Document13 pagesCours1 3eme 2021 2022MohamedBouguechaPas encore d'évaluation
- Tp1 2017Document4 pagesTp1 2017HOUSSAME NAIMPas encore d'évaluation
- Ese 17 PDFDocument8 pagesEse 17 PDFlotfibouchefiratPas encore d'évaluation
- Pratique de L'économétrie Linéaire - 2 - Multicolinéarité PDFDocument54 pagesPratique de L'économétrie Linéaire - 2 - Multicolinéarité PDFSoukaina Idlhajali100% (1)
- Corrige Premiere Spe 49 2020Document3 pagesCorrige Premiere Spe 49 2020Mohammed SalamPas encore d'évaluation
- Moyenne Arithmėtico-Géométrique Et Intégrale ElliptiqueDocument5 pagesMoyenne Arithmėtico-Géométrique Et Intégrale ElliptiqueScribd ReaderPas encore d'évaluation
- TP6 Complx 2018-2019Document2 pagesTP6 Complx 2018-2019Hadjer KaddourPas encore d'évaluation
- Table Thermodynamique R22 PDFDocument5 pagesTable Thermodynamique R22 PDFAbdessamie BichaouiPas encore d'évaluation
- Eacee 20 11Document75 pagesEacee 20 11youneselbekkaoui100% (1)
- Cours 1 StarfacDocument43 pagesCours 1 Starfacguyvensmarseille99Pas encore d'évaluation
- F05 Fonction InverseDocument2 pagesF05 Fonction InverseLawrez RiemannSteinPas encore d'évaluation
- Logique 2020Document4 pagesLogique 2020Mariem KsontiniPas encore d'évaluation
- Physique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresD'EverandPhysique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresÉvaluation : 5 sur 5 étoiles5/5 (2)
- Je me prépare aux examens du ministère en mathématiques: Es-tu prêt à passer le test ?D'EverandJe me prépare aux examens du ministère en mathématiques: Es-tu prêt à passer le test ?Évaluation : 4 sur 5 étoiles4/5 (1)
- Géobiologie de l'habitat et Géobiologie sacrée: Pour un lieu sainD'EverandGéobiologie de l'habitat et Géobiologie sacrée: Pour un lieu sainÉvaluation : 4.5 sur 5 étoiles4.5/5 (2)
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsD'EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Neuropsychologie: Les bases théoriques et pratiques du domaine d'étude (psychologie pour tous)D'EverandNeuropsychologie: Les bases théoriques et pratiques du domaine d'étude (psychologie pour tous)Pas encore d'évaluation
- Le fa, entre croyances et science: Pour une epistemologie des savoirs africainsD'EverandLe fa, entre croyances et science: Pour une epistemologie des savoirs africainsÉvaluation : 3.5 sur 5 étoiles3.5/5 (6)
- Comment développer l’autodiscipline: Résiste aux tentations et atteins tes objectifs à long termeD'EverandComment développer l’autodiscipline: Résiste aux tentations et atteins tes objectifs à long termeÉvaluation : 4.5 sur 5 étoiles4.5/5 (7)
- Un régime quantiqueD'EverandUn régime quantiqueÉvaluation : 5 sur 5 étoiles5/5 (1)
- Cabot-Caboche de Daniel Pennac: Questionnaire de lectureD'EverandCabot-Caboche de Daniel Pennac: Questionnaire de lecturePas encore d'évaluation
- Histoire de la psychologie scientifique: De la naissance de la psychologie à la neuropsychologie et aux champs d'application les plus actuelsD'EverandHistoire de la psychologie scientifique: De la naissance de la psychologie à la neuropsychologie et aux champs d'application les plus actuelsPas encore d'évaluation
- L'Ombre à l'Univers: La structure des particules élémentaires XIIfD'EverandL'Ombre à l'Univers: La structure des particules élémentaires XIIfPas encore d'évaluation
- Les defis du developpement local au SenegalD'EverandLes defis du developpement local au SenegalÉvaluation : 2 sur 5 étoiles2/5 (1)
- Les personnalités les plus productives de l'HistoireD'EverandLes personnalités les plus productives de l'HistoireÉvaluation : 4.5 sur 5 étoiles4.5/5 (2)
- Encyclopédie de la thérapie par ventouses : Une nouvelle éditionD'EverandEncyclopédie de la thérapie par ventouses : Une nouvelle éditionPas encore d'évaluation
- Les contes des mille et un mythes - Volume ID'EverandLes contes des mille et un mythes - Volume IÉvaluation : 5 sur 5 étoiles5/5 (1)
- Comment penser à l'intérieur de la boîte: FormidablesD'EverandComment penser à l'intérieur de la boîte: FormidablesPas encore d'évaluation
- Les Arts Divinatoires: Graphologie - Chiromancie - Physiognomonie - Influences astralesD'EverandLes Arts Divinatoires: Graphologie - Chiromancie - Physiognomonie - Influences astralesPas encore d'évaluation
- Les LES TRUCS MATHEMATIQUES AU PRIMAIRE: et si on leur donnait du sens!D'EverandLes LES TRUCS MATHEMATIQUES AU PRIMAIRE: et si on leur donnait du sens!Évaluation : 2 sur 5 étoiles2/5 (1)
- La pensée dirigée: Traité sur le raisonnement et les logiquesD'EverandLa pensée dirigée: Traité sur le raisonnement et les logiquesÉvaluation : 5 sur 5 étoiles5/5 (2)