Vous aimerez peut-être aussi
- Arduino | Pas à pas: Le guide ultime du débutantD'EverandArduino | Pas à pas: Le guide ultime du débutantPas encore d'évaluation
- Etude theorique de l'IOTDocument19 pagesEtude theorique de l'IOTzahira.ennajih1Pas encore d'évaluation
- Projets Arduino avec Tinkercad | Partie 2: Concevoir des projets électroniques avancés basés sur Arduino avec TinkercadD'EverandProjets Arduino avec Tinkercad | Partie 2: Concevoir des projets électroniques avancés basés sur Arduino avec TinkercadPas encore d'évaluation
- Chapitre 3Document15 pagesChapitre 3ben amor ben amorPas encore d'évaluation
- Chapitre 1 - 112932Document4 pagesChapitre 1 - 112932Will Smith TaherPas encore d'évaluation
- Chapitr IDocument18 pagesChapitr IHabib GherairPas encore d'évaluation
- Capteur Sde TMPDocument19 pagesCapteur Sde TMPElhadji Mamadou DiemePas encore d'évaluation
- Tp1 Arduino ProteusDocument6 pagesTp1 Arduino ProteusSaida HalouiPas encore d'évaluation
- ES IoT Chap0Document68 pagesES IoT Chap0BOUKHOBZA SOFIANEPas encore d'évaluation
- Chapitre 1 RCSF PDFDocument24 pagesChapitre 1 RCSF PDFIHEB MIMOUNIPas encore d'évaluation
- Capteur de SonDocument12 pagesCapteur de SonEmēry ChylerPas encore d'évaluation
- Présentation de La Carte MKR Vidor 4000Document27 pagesPrésentation de La Carte MKR Vidor 4000Ikram BerradaPas encore d'évaluation
- Ma PartieDocument7 pagesMa PartieAsma EL AZHARIPas encore d'évaluation
- MicrocontrôleursDocument16 pagesMicrocontrôleursMouhcine Ben MoussaPas encore d'évaluation
- ArduinoDocument5 pagesArduinoimanesellak398Pas encore d'évaluation
- Info Indus L2S3 2023 24Document84 pagesInfo Indus L2S3 2023 24justicedark6Pas encore d'évaluation
- TP ArduinoDocument29 pagesTP Arduinoisraalaya167Pas encore d'évaluation
- Khedim MicrocontrôleurDocument31 pagesKhedim MicrocontrôleurfaroukPas encore d'évaluation
- Technique EnetcomDocument29 pagesTechnique EnetcomAhmedGuesmiPas encore d'évaluation
- Chap 01Document16 pagesChap 01Fares ChetouhPas encore d'évaluation
- ModelDocument25 pagesModelkeusra germain zrakpaPas encore d'évaluation
- Leçon ArduinoDocument4 pagesLeçon ArduinoZohra OUELHAZIPas encore d'évaluation
- Programmation Des Systèmes Intelligents Et Connectés Avec ArduinoDocument31 pagesProgrammation Des Systèmes Intelligents Et Connectés Avec ArduinoPape mbaye DiawPas encore d'évaluation
- IoT.slides.2019Document43 pagesIoT.slides.2019tayari_lPas encore d'évaluation
- PPP s3Document9 pagesPPP s3Yassir MatadoresPas encore d'évaluation
- Rappelle ArduinoDocument42 pagesRappelle ArduinosanadPas encore d'évaluation
- Cahier Robotique 3scDocument4 pagesCahier Robotique 3scNizar SdiriPas encore d'évaluation
- Formation RobotiqueDocument15 pagesFormation Robotiqueattiahiba7Pas encore d'évaluation
- Article CETSIS 2014 GEII Montpellier v4 FinaleDocument8 pagesArticle CETSIS 2014 GEII Montpellier v4 FinaleMiguel MoyondziPas encore d'évaluation
- Id 10590 1Document34 pagesId 10590 1FouquetPas encore d'évaluation
- Fascicule IoTDocument15 pagesFascicule IoTAya BchiniPas encore d'évaluation
- Rapport Projet Instrumentation Communication (SANGARE SANGHO DJIRE) MGI CERFITEX 2019 2020Document43 pagesRapport Projet Instrumentation Communication (SANGARE SANGHO DJIRE) MGI CERFITEX 2019 2020Aboubacar Sidiky TraoréPas encore d'évaluation
- TPMICROCONTROLEURARDUINODocument53 pagesTPMICROCONTROLEURARDUINOKevin DjambouPas encore d'évaluation
- Câblage Et ProgrammationDocument10 pagesCâblage Et ProgrammationCristian Junior Incacutipa PerezPas encore d'évaluation
- 0709 ArduinoDocument6 pages0709 Arduinohamza ayechePas encore d'évaluation
- TP Interface Via Arduino UnoDocument32 pagesTP Interface Via Arduino UnoElyes FekiPas encore d'évaluation
- Cours MicrocontrrolleurDocument65 pagesCours MicrocontrrolleurCrypto Sylvain100% (1)
- Atelier Pratique Avec ArduinoDocument33 pagesAtelier Pratique Avec ArduinoMouhamed DEME100% (1)
- Quiz-SE_092938Document3 pagesQuiz-SE_092938francis rukanPas encore d'évaluation
- Présentation PfaDocument18 pagesPrésentation PfaAhmed JguirimPas encore d'évaluation
- Support Cours MicrocontroleursDocument80 pagesSupport Cours MicrocontroleursJrk MukalayPas encore d'évaluation
- Compte Rendu IotDocument17 pagesCompte Rendu Iotferiel ben frijaPas encore d'évaluation
- Archimat 2Document68 pagesArchimat 2Hichem HamdiPas encore d'évaluation
- 5187 186 p84Document5 pages5187 186 p84kamalPas encore d'évaluation
- Projet Voiture MatlabDocument19 pagesProjet Voiture MatlabSanhouidi Stephane0% (1)
- Leçon N°1: Presentation de L'Informatique Industrielle Et Des Systemes Micro-Programmes I - L'Informatique IndustrielleDocument120 pagesLeçon N°1: Presentation de L'Informatique Industrielle Et Des Systemes Micro-Programmes I - L'Informatique IndustrielleFulbert FissouPas encore d'évaluation
- Cao VHDL Mpse PDFDocument99 pagesCao VHDL Mpse PDFInes HattabPas encore d'évaluation
- NizarCHELLYCRATT2015 PDFDocument7 pagesNizarCHELLYCRATT2015 PDFgaetantaffoPas encore d'évaluation
- ArduinoDocument10 pagesArduinoUani KacoPas encore d'évaluation
- Rapport ÉclairageDocument29 pagesRapport ÉclairageHamza EL HASSAKPas encore d'évaluation
- ArduinooDocument24 pagesArduinooTurbo DieselPas encore d'évaluation
- Chapitre V MicroprocesseurDocument10 pagesChapitre V MicroprocesseurMouhamed MoustaphaPas encore d'évaluation
- Api G2Document9 pagesApi G2Sissoko FakourouPas encore d'évaluation
- Soc Lascmi3Document79 pagesSoc Lascmi3Ichrakk JaouedyPas encore d'évaluation
- TP TER LoRa STM32 Dalancon KissiDocument18 pagesTP TER LoRa STM32 Dalancon KissiPascal BerthouPas encore d'évaluation
- TP3 IotDocument3 pagesTP3 IotMoulay Ayoub ChaabaPas encore d'évaluation
- 4 Arduino PDFDocument38 pages4 Arduino PDFRedOne Sob100% (2)
- Chapitre II Architecture Générale D Un MicrocontroleurDocument22 pagesChapitre II Architecture Générale D Un Microcontroleurfou100% (1)
- TP S EmbarquéDocument77 pagesTP S EmbarquéSalahe LaouarPas encore d'évaluation
- TF1 09 Programmation Arduino 2017 - 2018Document23 pagesTF1 09 Programmation Arduino 2017 - 2018sidiPas encore d'évaluation
- Fiche Multiplier-Les 230406 190035 PDFDocument5 pagesFiche Multiplier-Les 230406 190035 PDFAbdou FayePas encore d'évaluation
- Mabel Banane PlantainDocument27 pagesMabel Banane PlantainMangala FistonPas encore d'évaluation
- Tfe-Mbusa Pika Philemon G3 HospDocument28 pagesTfe-Mbusa Pika Philemon G3 HospMangala FistonPas encore d'évaluation
- Plantes AphrodisiaquesDocument26 pagesPlantes AphrodisiaquesMangala FistonPas encore d'évaluation
- Cours SPSS - Docx - CopieDocument52 pagesCours SPSS - Docx - CopieMangala FistonPas encore d'évaluation
- Informatique V Istm Bbo-1Document77 pagesInformatique V Istm Bbo-1Mangala FistonPas encore d'évaluation
- Criteres Elections Cis 2023Document4 pagesCriteres Elections Cis 2023Mangala FistonPas encore d'évaluation
- Tfe Tamwanzire Corrigé-2 OkokDocument32 pagesTfe Tamwanzire Corrigé-2 OkokMangala FistonPas encore d'évaluation
- KANISA YA MITUME KWA HALI YA LEO L'église Catholique Du JourDocument13 pagesKANISA YA MITUME KWA HALI YA LEO L'église Catholique Du JourMangala FistonPas encore d'évaluation
- Python w1 To w9Document644 pagesPython w1 To w9Mangala FistonPas encore d'évaluation
- Grille Synthese D'analyse QualitativeDocument2 pagesGrille Synthese D'analyse QualitativeMangala FistonPas encore d'évaluation
- Formulaire Pour Le Recrutement Hopital de Beni 1 1Document1 pageFormulaire Pour Le Recrutement Hopital de Beni 1 1Mangala FistonPas encore d'évaluation
- Chapitre Troisieme HekimaDocument6 pagesChapitre Troisieme HekimaMangala FistonPas encore d'évaluation
- Aviculture ExperienceCHANGE HKI PDFDocument13 pagesAviculture ExperienceCHANGE HKI PDFMangala FistonPas encore d'évaluation
- Conseil Cooperation MutualiteDocument29 pagesConseil Cooperation MutualiteMangala FistonPas encore d'évaluation
- CV 4Document2 pagesCV 4Ousseynou KaPas encore d'évaluation
- Génie Logiciel Avancé Cours 4 - Conception - Stefano Zacchiroli PDFDocument83 pagesGénie Logiciel Avancé Cours 4 - Conception - Stefano Zacchiroli PDFEn Personne AlaeddinePas encore d'évaluation
- Hakane - Daifi Tp3conumDocument12 pagesHakane - Daifi Tp3conumcelestialearthcraftPas encore d'évaluation
- Evaluation de Performances Et Qualité de ServiceDocument2 pagesEvaluation de Performances Et Qualité de ServicedzcsconfPas encore d'évaluation
- 5 Ihm p120frDocument13 pages5 Ihm p120frmedPas encore d'évaluation
- Angular 6 - Developpez Facilemen - Simon Dieny PDFDocument231 pagesAngular 6 - Developpez Facilemen - Simon Dieny PDFmanPas encore d'évaluation
- Livret Pamcad Installation Rapide Et UtilisationDocument14 pagesLivret Pamcad Installation Rapide Et UtilisationNicolas POUPETPas encore d'évaluation
- TP Devoir 2022Document30 pagesTP Devoir 2022HamzaPas encore d'évaluation
- 05 Les StructuresDocument25 pages05 Les Structuresbénedo TangaPas encore d'évaluation
- Cours 3 Sécurité Des PaiementsDocument31 pagesCours 3 Sécurité Des Paiementsmr vPas encore d'évaluation
- d3 Js FRDocument72 pagesd3 Js FRLaurentMartinonPas encore d'évaluation
- 30 Sur PC Portable Gaming HP Victus 15-Fb0160nf 15,6 AMD Ryzen 5 16 Go RAM 512 Go SSD Argent Mica - PC Portable - Achat & PriDocument1 page30 Sur PC Portable Gaming HP Victus 15-Fb0160nf 15,6 AMD Ryzen 5 16 Go RAM 512 Go SSD Argent Mica - PC Portable - Achat & PriWillingGhost 8Pas encore d'évaluation
- Cours Laravel 9 Les Données La Relation NNDocument11 pagesCours Laravel 9 Les Données La Relation NNhamidi salaheddinPas encore d'évaluation
- Présentation Vuejs Salma ElbarboriDocument9 pagesPrésentation Vuejs Salma ElbarboriSALMA EL BARBORIPas encore d'évaluation
- Chedi Aouadi CV ConcepteurDocument1 pageChedi Aouadi CV ConcepteurAhmedBrahamPas encore d'évaluation
- Cours SEDocument69 pagesCours SESouad Najoua LagmiriPas encore d'évaluation
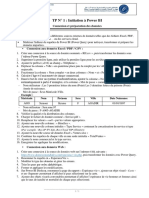
- TP #1: Initiation À Power BI: Connexion Et Préparation Des Données Objectifs PédagogiquesDocument1 pageTP #1: Initiation À Power BI: Connexion Et Préparation Des Données Objectifs PédagogiquesHAFIDA AIT ABED100% (2)
- C# - 03 - Constructs 2020 v0 PDFDocument84 pagesC# - 03 - Constructs 2020 v0 PDFXenosPas encore d'évaluation
- ARCHITECTURE D UN SYSTEME DE GESTION DE BASES DE DONNEES PapierDocument10 pagesARCHITECTURE D UN SYSTEME DE GESTION DE BASES DE DONNEES Papiernguessan lassiePas encore d'évaluation
- Ergonomie CognitiveDocument6 pagesErgonomie CognitiveBRAKNESSPas encore d'évaluation
- 15 Exercices Corrigés en Systèmes D'exploitation Et Architecture Des OrdinateursDocument11 pages15 Exercices Corrigés en Systèmes D'exploitation Et Architecture Des OrdinateursJean Baptiste SAWADOGOPas encore d'évaluation
- LOCATIONDocument4 pagesLOCATIONDrai DrayPas encore d'évaluation
- 6ES75121SM030AB0 Datasheet FRDocument8 pages6ES75121SM030AB0 Datasheet FRWiem MZALIPas encore d'évaluation
- Comment Flasher Un Produit Avec Un CPU Spreadtrum (FR)Document7 pagesComment Flasher Un Produit Avec Un CPU Spreadtrum (FR)Mergilles WatelinPas encore d'évaluation
- DESCRIPTIF FST Settat Master Professionel Methode Informatique Appliqué A La Gestion Des EntreprisesDocument27 pagesDESCRIPTIF FST Settat Master Professionel Methode Informatique Appliqué A La Gestion Des EntreprisesITAdmissionPas encore d'évaluation
- G2010ser OnlineManual Win FR V02Document308 pagesG2010ser OnlineManual Win FR V02YASSINE YASPas encore d'évaluation
- Vei 1678Document16 pagesVei 1678EunockPas encore d'évaluation
- C++ Les Conversions de TypesDocument8 pagesC++ Les Conversions de TypesLAPROSEPas encore d'évaluation
- (CHAP1) Introduction À La BIDocument14 pages(CHAP1) Introduction À La BISiwar GHALLEBPas encore d'évaluation
- L'analyse fondamentale facile à apprendre: Le guide d'introduction aux techniques et stratégies d'analyse fondamentale pour anticiper les événements qui font bouger les marchésD'EverandL'analyse fondamentale facile à apprendre: Le guide d'introduction aux techniques et stratégies d'analyse fondamentale pour anticiper les événements qui font bouger les marchésÉvaluation : 3.5 sur 5 étoiles3.5/5 (4)
- Wireshark pour les débutants : Le guide ultime du débutant pour apprendre les bases de l’analyse réseau avec Wireshark.D'EverandWireshark pour les débutants : Le guide ultime du débutant pour apprendre les bases de l’analyse réseau avec Wireshark.Pas encore d'évaluation
- Comment analyser les gens : Introduction à l’analyse du langage corporel et les types de personnalité.D'EverandComment analyser les gens : Introduction à l’analyse du langage corporel et les types de personnalité.Pas encore d'évaluation
- Python | Programmer pas à pas: Le guide du débutant pour une initiation simple & rapide à la programmationD'EverandPython | Programmer pas à pas: Le guide du débutant pour une initiation simple & rapide à la programmationPas encore d'évaluation
- Dark Python : Apprenez à créer vos outils de hacking.D'EverandDark Python : Apprenez à créer vos outils de hacking.Évaluation : 3 sur 5 étoiles3/5 (1)
- Hacking pour débutants : Le guide complet du débutant pour apprendre les bases du hacking avec Kali LinuxD'EverandHacking pour débutants : Le guide complet du débutant pour apprendre les bases du hacking avec Kali LinuxÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- L'analyse technique facile à apprendre: Comment construire et interpréter des graphiques d'analyse technique pour améliorer votre activité de trading en ligne.D'EverandL'analyse technique facile à apprendre: Comment construire et interpréter des graphiques d'analyse technique pour améliorer votre activité de trading en ligne.Évaluation : 3.5 sur 5 étoiles3.5/5 (6)
- Le trading en ligne facile à apprendre: Comment devenir un trader en ligne et apprendre à investir avec succèsD'EverandLe trading en ligne facile à apprendre: Comment devenir un trader en ligne et apprendre à investir avec succèsÉvaluation : 3.5 sur 5 étoiles3.5/5 (19)
- WiFi Hacking : Le guide simplifié du débutant pour apprendre le hacking des réseaux WiFi avec Kali LinuxD'EverandWiFi Hacking : Le guide simplifié du débutant pour apprendre le hacking des réseaux WiFi avec Kali LinuxÉvaluation : 3 sur 5 étoiles3/5 (1)
- Hacking pour débutant Le guide ultime du débutant pour apprendre les bases du hacking avec Kali Linux et comment se protéger des hackersD'EverandHacking pour débutant Le guide ultime du débutant pour apprendre les bases du hacking avec Kali Linux et comment se protéger des hackersPas encore d'évaluation
- Guide Pour Les Débutants En Matière De Piratage Informatique: Comment Pirater Un Réseau Sans Fil, Sécurité De Base Et Test De Pénétration, Kali LinuxD'EverandGuide Pour Les Débutants En Matière De Piratage Informatique: Comment Pirater Un Réseau Sans Fil, Sécurité De Base Et Test De Pénétration, Kali LinuxÉvaluation : 1 sur 5 étoiles1/5 (1)
- Secrets du Marketing des Médias Sociaux 2021: Conseils et Stratégies Extrêmement Efficaces votre Facebook (Stimulez votre Engagement et Gagnez des Clients Fidèles)D'EverandSecrets du Marketing des Médias Sociaux 2021: Conseils et Stratégies Extrêmement Efficaces votre Facebook (Stimulez votre Engagement et Gagnez des Clients Fidèles)Évaluation : 4 sur 5 étoiles4/5 (2)
- Manuel de fabrication du savon: Je fabrique mes savons facilementD'EverandManuel de fabrication du savon: Je fabrique mes savons facilementÉvaluation : 5 sur 5 étoiles5/5 (4)
- Wi-Fi Hacking avec kali linux Guide étape par étape : apprenez à pénétrer les réseaux Wifi et les meilleures stratégies pour les sécuriserD'EverandWi-Fi Hacking avec kali linux Guide étape par étape : apprenez à pénétrer les réseaux Wifi et les meilleures stratégies pour les sécuriserPas encore d'évaluation
- NFT et Cryptoart: Le guide complet pour investir, créer et vendre avec succès des jetons non fongibles sur le marché de l'art numériqueD'EverandNFT et Cryptoart: Le guide complet pour investir, créer et vendre avec succès des jetons non fongibles sur le marché de l'art numériqueÉvaluation : 5 sur 5 étoiles5/5 (5)
- Explication De La Technologie Blockchain: Guide Ultime Du Débutant Au Sujet Du Portefeuille Blockchain, Mines, Bitcoin, Ripple, EthereumD'EverandExplication De La Technologie Blockchain: Guide Ultime Du Débutant Au Sujet Du Portefeuille Blockchain, Mines, Bitcoin, Ripple, EthereumPas encore d'évaluation
- Kali Linux pour débutant : Le guide ultime du débutant pour apprendre les bases de Kali Linux.D'EverandKali Linux pour débutant : Le guide ultime du débutant pour apprendre les bases de Kali Linux.Évaluation : 5 sur 5 étoiles5/5 (1)
- La communication professionnelle facile à apprendre: Le guide pratique de la communication professionnelle et des meilleures stratégies de communication d'entrepriseD'EverandLa communication professionnelle facile à apprendre: Le guide pratique de la communication professionnelle et des meilleures stratégies de communication d'entrepriseÉvaluation : 5 sur 5 étoiles5/5 (1)
- Le Bon Accord avec le Bon Fournisseur: Comment Mobiliser Toute la Puissance de vos Partenaires Commerciaux pour Réaliser vos ObjectifsD'EverandLe Bon Accord avec le Bon Fournisseur: Comment Mobiliser Toute la Puissance de vos Partenaires Commerciaux pour Réaliser vos ObjectifsÉvaluation : 4 sur 5 étoiles4/5 (2)
- Piraté: Guide Ultime De Kali Linux Et De Piratage Sans Fil Avec Des Outils De Test De SécuritéD'EverandPiraté: Guide Ultime De Kali Linux Et De Piratage Sans Fil Avec Des Outils De Test De SécuritéPas encore d'évaluation
- Gestion de projet : outils pour la vie quotidienneD'EverandGestion de projet : outils pour la vie quotidienneÉvaluation : 5 sur 5 étoiles5/5 (2)
- Créer Son Propre Site Internet Et Son Blog GratuitementD'EverandCréer Son Propre Site Internet Et Son Blog GratuitementÉvaluation : 5 sur 5 étoiles5/5 (1)
- La psychologie du travail facile à apprendre: Le guide d'introduction à l'utilisation des connaissances psychologiques dans le domaine du travail et des organisationsD'EverandLa psychologie du travail facile à apprendre: Le guide d'introduction à l'utilisation des connaissances psychologiques dans le domaine du travail et des organisationsPas encore d'évaluation
- Marketing: Guide Pour Gagner De L'argent En Ligne Avec Les Réseaux SociauxD'EverandMarketing: Guide Pour Gagner De L'argent En Ligne Avec Les Réseaux SociauxPas encore d'évaluation
- Technologie automobile: Les Grands Articles d'UniversalisD'EverandTechnologie automobile: Les Grands Articles d'UniversalisPas encore d'évaluation
- Le plan marketing en 4 étapes: Stratégies et étapes clés pour créer des plans de marketing qui fonctionnentD'EverandLe plan marketing en 4 étapes: Stratégies et étapes clés pour créer des plans de marketing qui fonctionnentPas encore d'évaluation