Vous aimerez peut-être aussi
- Le système d'approvisionnement en terres dans les villes d'Afrique de l'Ouest: L’exemple de BamakoD'EverandLe système d'approvisionnement en terres dans les villes d'Afrique de l'Ouest: L’exemple de BamakoPas encore d'évaluation
- Réseau de NeuronesDocument49 pagesRéseau de NeuronesOualid ZaouichPas encore d'évaluation
- Machines Intelligentes: Combler le fossé entre l'internet industriel des objets et la quatrième révolution industrielleD'EverandMachines Intelligentes: Combler le fossé entre l'internet industriel des objets et la quatrième révolution industriellePas encore d'évaluation
- Reseau de NeuroneDocument46 pagesReseau de Neuronealirachid100% (5)
- Systèmes De Communication Véhiculaire: Les perspectives d'avenir du transport intelligentD'EverandSystèmes De Communication Véhiculaire: Les perspectives d'avenir du transport intelligentPas encore d'évaluation
- Réseaux de NeuronesDocument54 pagesRéseaux de NeuronesKhalifa BakkarPas encore d'évaluation
- Presentahion Reseau de NeuroneDocument53 pagesPresentahion Reseau de NeuroneHmz OussamaPas encore d'évaluation
- Transfert De Puissance Sans Fil: Recharger les véhicules électriques pendant qu'ils sont sur la routeD'EverandTransfert De Puissance Sans Fil: Recharger les véhicules électriques pendant qu'ils sont sur la routePas encore d'évaluation
- Réseaux de Neurone ArtificielDocument29 pagesRéseaux de Neurone ArtificiellebelulePas encore d'évaluation
- Grille Intelligente: Échange d'électricité et d'informations entre les maisons et les centrales électriquesD'EverandGrille Intelligente: Échange d'électricité et d'informations entre les maisons et les centrales électriquesPas encore d'évaluation
- FaceRec PDFDocument63 pagesFaceRec PDFNEROPas encore d'évaluation
- MAITRISER Python : De l'Apprentissage aux Projets ProfessionnelsD'EverandMAITRISER Python : De l'Apprentissage aux Projets ProfessionnelsPas encore d'évaluation
- Cours Reseaux de NeuronesDocument20 pagesCours Reseaux de NeuronesPatrick Marcial Etata Mandjouk100% (1)
- Reseaux de Neurones: PerceptronDocument20 pagesReseaux de Neurones: PerceptronAnovar_ebooks100% (1)
- Reseau NeroneDocument22 pagesReseau NeroneMohamed Amine Bougria100% (2)
- Les Reseaux de NeuronesDocument22 pagesLes Reseaux de Neuronesariel100% (1)
- Cours TIA - Chapitre 1 PDFDocument16 pagesCours TIA - Chapitre 1 PDFHoussine GuePas encore d'évaluation
- Introduction Aux Reseaux de NeuronesDocument31 pagesIntroduction Aux Reseaux de NeuronesIbrahim RanaoPas encore d'évaluation
- Analyse Par Reseaux de NeuronesDocument79 pagesAnalyse Par Reseaux de NeuronesMichael Mefenza100% (1)
- MemoireDocument90 pagesMemoireSoheib SadounPas encore d'évaluation
- Cours - Techniques de Lintelligence ArtificielleDocument72 pagesCours - Techniques de Lintelligence Artificiellefarid saad0% (1)
- TP 3 RNDocument2 pagesTP 3 RNIlyes KhelifiPas encore d'évaluation
- Slides Ordonnancement Temps ReelDocument108 pagesSlides Ordonnancement Temps Reelhuyvt01100% (1)
- Assembleur ExerciceDocument15 pagesAssembleur ExerciceMeryeme Bayri100% (1)
- Programme en PDFDocument35 pagesProgramme en PDFWiam Khettab100% (1)
- Réseaux de Neurones ArtificielsDocument39 pagesRéseaux de Neurones ArtificielsMrabtei Ayoub100% (2)
- Ressources Mbot Robot Intelligent Suiveur de LigneDocument2 pagesRessources Mbot Robot Intelligent Suiveur de LigneSaleh LaifiPas encore d'évaluation
- Matlb TPDocument50 pagesMatlb TPMadani LkbirPas encore d'évaluation
- Etude D'une Navigation Visuelee Pour Un Robot MobileDocument93 pagesEtude D'une Navigation Visuelee Pour Un Robot Mobileالياس سميدةPas encore d'évaluation
- Chapitre 4 - Cours TIADocument13 pagesChapitre 4 - Cours TIAHoussine GuePas encore d'évaluation
- Architectur ParallèleDocument163 pagesArchitectur ParallèleAbdellah AfetassePas encore d'évaluation
- Programmation Des PIC en C Part2Document34 pagesProgrammation Des PIC en C Part2marocainissamPas encore d'évaluation
- Chapitre1 Evolution Des OrdinateursDocument45 pagesChapitre1 Evolution Des OrdinateursidemPas encore d'évaluation
- MSGM 6Document148 pagesMSGM 6Ishak .FPas encore d'évaluation
- Réseau de Neurones ArtificielsDocument14 pagesRéseau de Neurones ArtificielsSouhaib LoudaPas encore d'évaluation
- Rapport Pfe Version FinalDocument49 pagesRapport Pfe Version FinalKhadija El AmouryPas encore d'évaluation
- Voiture Comde VocaleDocument42 pagesVoiture Comde VocaleImane LaminePas encore d'évaluation
- Les Réseaux de Neurones Et Leurs ApplicationsDocument40 pagesLes Réseaux de Neurones Et Leurs ApplicationsAli Daoudi50% (2)
- Applications de La Logique FloueDocument3 pagesApplications de La Logique FloueAlain JobsPas encore d'évaluation
- TP Integration Num FPGA V1.7Document22 pagesTP Integration Num FPGA V1.7Ouma ImaaPas encore d'évaluation
- La Robotique Mobile Et Les Différentes Méthodes de Navigation Pour Robot MobileDocument46 pagesLa Robotique Mobile Et Les Différentes Méthodes de Navigation Pour Robot MobileZineb100% (1)
- Cours Systemes Embarques PDFDocument50 pagesCours Systemes Embarques PDFHichem Taghouti67% (3)
- 1 Définition DDocument10 pages1 Définition DNedjoua BenaliPas encore d'évaluation
- Ele119 Eprm Cours TP PDFDocument368 pagesEle119 Eprm Cours TP PDFIbrahim IbrahimPas encore d'évaluation
- Cours-Architectures Des Processeurs-Mr Nizar TOUJANIDocument115 pagesCours-Architectures Des Processeurs-Mr Nizar TOUJANIIbtihel MechleouiPas encore d'évaluation
- MemoireDocument82 pagesMemoireDanh Kuekam0% (1)
- ArduinooDocument24 pagesArduinooTurbo DieselPas encore d'évaluation
- Formation Arduino 8 - WIFIDocument35 pagesFormation Arduino 8 - WIFITAHRI khalid100% (1)
- Commande Par Backstepping D'une Machine PDFDocument67 pagesCommande Par Backstepping D'une Machine PDFannanePas encore d'évaluation
- Suivi de Trajectoires D'un Robot Mobile Par La Logique FloueDocument83 pagesSuivi de Trajectoires D'un Robot Mobile Par La Logique FloueIbrahim100% (4)
- ANFISDocument3 pagesANFISAchraf Boura100% (1)
- CIRA1 - 1) Capteurs PDFDocument21 pagesCIRA1 - 1) Capteurs PDFBessem BhiriPas encore d'évaluation
- Cours SM en Ligne-ConvertiDocument72 pagesCours SM en Ligne-ConvertiAnfel CPas encore d'évaluation
- Mini Projet-MechatronicDocument9 pagesMini Projet-MechatronicFiras KhemakhemPas encore d'évaluation
- Série TZDocument4 pagesSérie TZkhawlaPas encore d'évaluation
- Perceptron Multicouche RicheDocument7 pagesPerceptron Multicouche RicheBilou Mender100% (1)
- Les Réseaux Locaux Industriels R.L.IDocument30 pagesLes Réseaux Locaux Industriels R.L.IswinthaPas encore d'évaluation
- DSP IIT 2télécom ch4 ModifiéDocument28 pagesDSP IIT 2télécom ch4 ModifiéRahma FakhfakhPas encore d'évaluation
- Cours MicrocontrrolleurDocument65 pagesCours MicrocontrrolleurCrypto Sylvain100% (1)
- Elnum TD5 Sol PDFDocument5 pagesElnum TD5 Sol PDFbenaouda31Pas encore d'évaluation
- Topologie Des Onduleurs SolairesDocument120 pagesTopologie Des Onduleurs SolairesSouhaib LoudaPas encore d'évaluation
- 4-MIC4220 Trans Fourier ZDocument26 pages4-MIC4220 Trans Fourier ZSouhaib LoudaPas encore d'évaluation
- 9-Exercices Sur Le GRAFCET PDFDocument7 pages9-Exercices Sur Le GRAFCET PDFdjelbou100% (1)
- 1a Automatique TpsDocument38 pages1a Automatique TpsSouhaib LoudaPas encore d'évaluation
- A4 Licence Electrotechnique PDFDocument136 pagesA4 Licence Electrotechnique PDFSouhaib LoudaPas encore d'évaluation
- Ch31 Les Preactionneurs ElectriquesDocument7 pagesCh31 Les Preactionneurs ElectriquesMohamed LarbiPas encore d'évaluation
- 2a Tis Robotique Slides PDFDocument213 pages2a Tis Robotique Slides PDFSouhaib LoudaPas encore d'évaluation
- Ele6306 Exo1 Introduction PDFDocument6 pagesEle6306 Exo1 Introduction PDFSouhaib LoudaPas encore d'évaluation
- 09 - FiabiliteDocument6 pages09 - FiabiliteSouhaib LoudaPas encore d'évaluation
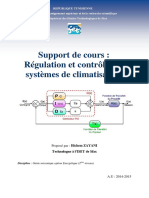
- Rgulation Et Contrle S CDocument92 pagesRgulation Et Contrle S COmar Rajhi100% (1)
- Patrons de Conception Genie LogicielDocument11 pagesPatrons de Conception Genie Logicielطه زهيرPas encore d'évaluation
- Experimentez La Magie de La PerformanceDocument14 pagesExperimentez La Magie de La PerformanceRichard Crao100% (1)
- Dossier D - Entreprise - LA PROCRASTINATION PDFDocument86 pagesDossier D - Entreprise - LA PROCRASTINATION PDFkenzakettani33% (3)
- Introduction A La LexicologieDocument36 pagesIntroduction A La LexicologieMariuca Popescu100% (2)
- Examen PDFDocument5 pagesExamen PDFcyrine khbouPas encore d'évaluation
- Atome Bohr PDFDocument10 pagesAtome Bohr PDFjadPas encore d'évaluation
- L Accord Du Participe Passe PDFDocument7 pagesL Accord Du Participe Passe PDForleanseliPas encore d'évaluation
- Sagesse Égyptienne Revue181Document17 pagesSagesse Égyptienne Revue181bertrand de comminges100% (1)
- TD. Planification Et Aménagement Spatial 1Document9 pagesTD. Planification Et Aménagement Spatial 1baho btwPas encore d'évaluation
- LCS TD TPDocument6 pagesLCS TD TPinfocomputePas encore d'évaluation
- Gestion Paie Et RemunerationDocument83 pagesGestion Paie Et RemunerationКари МедPas encore d'évaluation
- Final MemeDocument64 pagesFinal MemeCara mellaPas encore d'évaluation
- Resume16 GroupesDocument5 pagesResume16 GroupesAyoubPas encore d'évaluation
- Usthb Doctorat 2016Document8 pagesUsthb Doctorat 2016Oussama KhelilPas encore d'évaluation
- Comptabilité Ivoirienne 2017Document92 pagesComptabilité Ivoirienne 2017Eric AmanPas encore d'évaluation
- Eco2016 CreferExampro2016Document2 pagesEco2016 CreferExampro2016ygwwtapvPas encore d'évaluation
- La Liste Rouge Des Araignée Dans Le Nord Et Le Pas-de-CalaisDocument28 pagesLa Liste Rouge Des Araignée Dans Le Nord Et Le Pas-de-CalaisFrance 3 Hauts-de-FrancePas encore d'évaluation
- Cours Exo7 MathDocument473 pagesCours Exo7 Matherrairachid100% (2)
- CH 4-7-Prof JAMÏ-TO - Approch SociologiqDocument9 pagesCH 4-7-Prof JAMÏ-TO - Approch SociologiqAlaea AhkPas encore d'évaluation
- Ferdinand BrunotDocument18 pagesFerdinand BrunotYakhouba shamshu dine CisséPas encore d'évaluation
- Recueil Trafic Routier 2016 - VFDocument273 pagesRecueil Trafic Routier 2016 - VFMohamed AssadPas encore d'évaluation
- Ds HydrologieDocument2 pagesDs Hydrologieⵀⴰⵊⴰⵔ ⴰⴱPas encore d'évaluation
- 1 ftvxg41Document3 pages1 ftvxg41jimzd7215Pas encore d'évaluation
- Le guide du hacker : le guide simplifié du débutant pour apprendre les bases du hacking avec Kali LinuxD'EverandLe guide du hacker : le guide simplifié du débutant pour apprendre les bases du hacking avec Kali LinuxÉvaluation : 5 sur 5 étoiles5/5 (2)
- Hypnotisme et Magnétisme, Somnambulisme, Suggestion et Télépathie, Influence personnelle: Cours Pratique completD'EverandHypnotisme et Magnétisme, Somnambulisme, Suggestion et Télépathie, Influence personnelle: Cours Pratique completÉvaluation : 4.5 sur 5 étoiles4.5/5 (8)
- Le livre de la mémoire libérée : Apprenez plus vite, retenez tout avec des techniques de mémorisation simples et puissantesD'EverandLe livre de la mémoire libérée : Apprenez plus vite, retenez tout avec des techniques de mémorisation simples et puissantesÉvaluation : 4 sur 5 étoiles4/5 (6)
- Améliorer votre mémoire: Un Guide pour l'augmentation de la puissance du cerveau, utilisant des techniques et méthodesD'EverandAméliorer votre mémoire: Un Guide pour l'augmentation de la puissance du cerveau, utilisant des techniques et méthodesÉvaluation : 5 sur 5 étoiles5/5 (2)
- Géobiologie de l'habitat et Géobiologie sacrée: Pour un lieu sainD'EverandGéobiologie de l'habitat et Géobiologie sacrée: Pour un lieu sainÉvaluation : 4.5 sur 5 étoiles4.5/5 (2)
- Anatomie & 100 étirements essentiels: Techniques, Bénéfices attendus, Précautions à prendre, Conseils, Tableaux de séries, DouleursD'EverandAnatomie & 100 étirements essentiels: Techniques, Bénéfices attendus, Précautions à prendre, Conseils, Tableaux de séries, DouleursPas encore d'évaluation
- Neuropsychologie: Les bases théoriques et pratiques du domaine d'étude (psychologie pour tous)D'EverandNeuropsychologie: Les bases théoriques et pratiques du domaine d'étude (psychologie pour tous)Pas encore d'évaluation
- Entretien clinique: Outils et techniques de diagnostic en santé mentaleD'EverandEntretien clinique: Outils et techniques de diagnostic en santé mentalePas encore d'évaluation
- Force Mentale et Maîtrise de la Discipline: Renforcez votre Confiance en vous pour Débloquer votre Courage et votre Résilience ! (Comprend un Manuel Pratique en 10 Étapes et 15 Puissants Exercices)D'EverandForce Mentale et Maîtrise de la Discipline: Renforcez votre Confiance en vous pour Débloquer votre Courage et votre Résilience ! (Comprend un Manuel Pratique en 10 Étapes et 15 Puissants Exercices)Évaluation : 4.5 sur 5 étoiles4.5/5 (28)
- Secrets ancestraux d'un maître guérisseur: Un sceptique occidental, un maître oriental et les plus grands secrets de la vieD'EverandSecrets ancestraux d'un maître guérisseur: Un sceptique occidental, un maître oriental et les plus grands secrets de la vieÉvaluation : 5 sur 5 étoiles5/5 (2)
- Comment développer l’autodiscipline: Résiste aux tentations et atteins tes objectifs à long termeD'EverandComment développer l’autodiscipline: Résiste aux tentations et atteins tes objectifs à long termeÉvaluation : 4.5 sur 5 étoiles4.5/5 (7)
- Aimez-Vous en 12 Étapes Pratiques: Un Manuel pour Améliorer l'Estime de Soi, Prendre Conscience de sa Valeur, se Débarrasser du Doute et Trouver un Bonheur VéritableD'EverandAimez-Vous en 12 Étapes Pratiques: Un Manuel pour Améliorer l'Estime de Soi, Prendre Conscience de sa Valeur, se Débarrasser du Doute et Trouver un Bonheur VéritableÉvaluation : 5 sur 5 étoiles5/5 (4)
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsD'EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Magnétisme Personnel ou Psychique: Éducation de la Pensée, développement de la Volonté, pour être Heureux, Fort, Bien Portant et réussir en tout.D'EverandMagnétisme Personnel ou Psychique: Éducation de la Pensée, développement de la Volonté, pour être Heureux, Fort, Bien Portant et réussir en tout.Évaluation : 5 sur 5 étoiles5/5 (1)
- Le TDA/H chez l'adulte: Apprendre à vivre sereinement avec son trouble de l'attentionD'EverandLe TDA/H chez l'adulte: Apprendre à vivre sereinement avec son trouble de l'attentionPas encore d'évaluation
- 20 Véritables remèdes de nos grands-mères pour maigrir vite et enfin perdre du poidsD'Everand20 Véritables remèdes de nos grands-mères pour maigrir vite et enfin perdre du poidsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Production et propagation des sons: Les Grands Articles d'UniversalisD'EverandProduction et propagation des sons: Les Grands Articles d'UniversalisPas encore d'évaluation
- La Pensée Positive en 30 Jours: Manuel Pratique pour Penser Positivement, Former votre Critique Intérieur, Arrêter la Réflexion Excessive et Changer votre État d'Esprit: Devenir une Personne Consciente et PositiveD'EverandLa Pensée Positive en 30 Jours: Manuel Pratique pour Penser Positivement, Former votre Critique Intérieur, Arrêter la Réflexion Excessive et Changer votre État d'Esprit: Devenir une Personne Consciente et PositiveÉvaluation : 4.5 sur 5 étoiles4.5/5 (12)
- Réfléchissez et devenez riche: Le grand livre de l’esprit maîtreD'EverandRéfléchissez et devenez riche: Le grand livre de l’esprit maîtreÉvaluation : 4 sur 5 étoiles4/5 (509)
- Revue des incompris revue d'histoire des oubliettes: Le Réveil de l'Horloge de Célestin Louis Maxime Dubuisson aliéniste et poèteD'EverandRevue des incompris revue d'histoire des oubliettes: Le Réveil de l'Horloge de Célestin Louis Maxime Dubuisson aliéniste et poèteÉvaluation : 3 sur 5 étoiles3/5 (3)
- Émotions et intelligence émotionnelle dans les organisationsD'EverandÉmotions et intelligence émotionnelle dans les organisationsPas encore d'évaluation