Vous aimerez peut-être aussi
- Corriges Mécanique Lève Moto EtDocument2 pagesCorriges Mécanique Lève Moto EtDavid Jay100% (1)
- S07 Poclain Wheel Motor MS18 ADocument48 pagesS07 Poclain Wheel Motor MS18 ANeil100% (1)
- Exercice Equiprojectivit Pompe Ptrole EnoncDocument3 pagesExercice Equiprojectivit Pompe Ptrole Enoncspectrum660% (1)
- TP Etau À Ventouse ProfDocument5 pagesTP Etau À Ventouse Profmidoun100% (2)
- Construction Mécanique - TD Spéciaux - MkaDocument13 pagesConstruction Mécanique - TD Spéciaux - MkaJordan Yakam0% (1)
- TD Synthèse-TOUR SEMI-AUTOMATIQUEDocument26 pagesTD Synthèse-TOUR SEMI-AUTOMATIQUEAb HanaePas encore d'évaluation
- TD6 Schéma Ciné Touret À MeulerDocument2 pagesTD6 Schéma Ciné Touret À MeulerHamza Elallam100% (7)
- Exercice Limiteur de CoupleDocument4 pagesExercice Limiteur de CoupleMortadha Rabah100% (1)
- Dessin de Définition - 2020 - 1SDocument4 pagesDessin de Définition - 2020 - 1SMourad Laribi100% (3)
- ProgcnDocument34 pagesProgcnJed MansouriPas encore d'évaluation
- 2016-04 Tuto Remplacement Serrure C3Document5 pages2016-04 Tuto Remplacement Serrure C3ov3rsoul50% (2)
- Tronconneuse AutomatiseeDocument2 pagesTronconneuse AutomatiseeRouaissi RidhaPas encore d'évaluation
- Enoncé DS2 Mars 20191 - 1Document2 pagesEnoncé DS2 Mars 20191 - 1Fatma LaribiPas encore d'évaluation
- Evaluation - Ajustements - Vrin Bosch - LvesDocument6 pagesEvaluation - Ajustements - Vrin Bosch - Lveskililibenali100% (1)
- Evaluation Cotation Fonctionnelle Vrin BoschDocument4 pagesEvaluation Cotation Fonctionnelle Vrin Boschhasan bishPas encore d'évaluation
- Devoir Corrigé de Contrôle N°2 - Génie Mécanique Emmeteur Terrestre (Support Orientable) - Bac Technique (2013-2014) MR Ben Abdallah Marouan PDFDocument15 pagesDevoir Corrigé de Contrôle N°2 - Génie Mécanique Emmeteur Terrestre (Support Orientable) - Bac Technique (2013-2014) MR Ben Abdallah Marouan PDFabdelbasset11Pas encore d'évaluation
- Dossier de Technologie de Construction Mécanique 2Document50 pagesDossier de Technologie de Construction Mécanique 2ahmed100% (2)
- Sujet 5 Mécanisme de Transmission CorrectionDocument6 pagesSujet 5 Mécanisme de Transmission CorrectionYahya AidaraPas encore d'évaluation
- Devoir de Controle N°2Document8 pagesDevoir de Controle N°2yves100% (2)
- TD5 Ci9-1 Statique Graphique-CorrigéDocument7 pagesTD5 Ci9-1 Statique Graphique-CorrigéAbdellah Hajjy100% (1)
- Sujet 5 Mecanisme de TransmissionDocument6 pagesSujet 5 Mecanisme de TransmissionBOUREIMA ZOGONAPas encore d'évaluation
- TD Limiteur de CoupleDocument2 pagesTD Limiteur de CoupleHamami Aymen100% (2)
- Correctionnaire Nouveau - Chapitre IVDocument23 pagesCorrectionnaire Nouveau - Chapitre IVdouda777767% (6)
- 01-Lecon1 Analyse Fonctionnelle 2012-13Document8 pages01-Lecon1 Analyse Fonctionnelle 2012-13Med Aymen Bensalem100% (1)
- Met T 31 TDDocument5 pagesMet T 31 TDspectrum66Pas encore d'évaluation
- Dessin D'ensembleDocument9 pagesDessin D'ensembleBouabdellaoui saif ennasr100% (1)
- TD ConstructionDocument6 pagesTD ConstructionYoussef TrimechPas encore d'évaluation
- Devoir de Construction MécaniqueDocument1 pageDevoir de Construction MécaniqueIkram100% (1)
- Epreuve Sujet Bac 2021 Construction Mecanique T1 1er Groupe 2021 SenegalDocument7 pagesEpreuve Sujet Bac 2021 Construction Mecanique T1 1er Groupe 2021 SenegalSaliouPas encore d'évaluation
- Caractères de LiaisonDocument5 pagesCaractères de LiaisonGuy Effa100% (1)
- TD Sur Les Embrayage - FreinDocument5 pagesTD Sur Les Embrayage - Freingerard correa86% (7)
- Devoir+de+Controle+N1 1AS 2021 Serre Tube Sans+Montage+Document4 pagesDevoir+de+Controle+N1 1AS 2021 Serre Tube Sans+Montage+Hamza Isksioui0% (1)
- 32-Roue de FrictionDocument4 pages32-Roue de FrictionHamza Kerroum100% (2)
- Devoir de Synthèse N°2 - Génie Mécanique - Systéme de Conditionnement de Savons - 3ème Technique (2016-2017) MR Mlaouhi Slaheddine PDFDocument8 pagesDevoir de Synthèse N°2 - Génie Mécanique - Systéme de Conditionnement de Savons - 3ème Technique (2016-2017) MR Mlaouhi Slaheddine PDFkhocinePas encore d'évaluation
- Devoir de Synthèse N°1 - Génie Mécanique Cellule Flexible D'usinage - 3ème Technique (2015-2016) MR Mlaouhi Slaheddine PDFDocument7 pagesDevoir de Synthèse N°1 - Génie Mécanique Cellule Flexible D'usinage - 3ème Technique (2015-2016) MR Mlaouhi Slaheddine PDFmohouchPas encore d'évaluation
- EPREUVE TERMINALE CONSTRUSTION MECANIQUE (Enregistré Automatiquement) (Enregistré Automatiquement)Document10 pagesEPREUVE TERMINALE CONSTRUSTION MECANIQUE (Enregistré Automatiquement) (Enregistré Automatiquement)etoumbe Alfred100% (3)
- Exercice Cotes ToleranDocument2 pagesExercice Cotes Toleransamir ghebouli100% (1)
- Devoir Corrigé de Contrôle N°2 - Génie Mécanique Système de Conditionnement Des Boites - 3ème Technique (2013-2014) MR Ben Abdallah MarouanDocument14 pagesDevoir Corrigé de Contrôle N°2 - Génie Mécanique Système de Conditionnement Des Boites - 3ème Technique (2013-2014) MR Ben Abdallah MarouanMohamed SaifPas encore d'évaluation
- 04 Exercice CremaillereDocument1 page04 Exercice CremaillereAhmed Najjar100% (1)
- Roulement BCDocument6 pagesRoulement BCOtman OtoPas encore d'évaluation
- Devoir de Synthese N°2 1as Lycee Bir Lahmar Azzabi Moez-2020-2021 - 095211Document6 pagesDevoir de Synthese N°2 1as Lycee Bir Lahmar Azzabi Moez-2020-2021 - 095211Imed MoussaPas encore d'évaluation
- TD Etau de ModelisteDocument6 pagesTD Etau de Modelisteattoumii80% (5)
- Serietambour MotoreducteurDocument6 pagesSerietambour Motoreducteurpaire animePas encore d'évaluation
- FC05b Statique GraphiqueDocument7 pagesFC05b Statique Graphiquepouvoir Koussou100% (1)
- Schéma Cinématique - 2020Document4 pagesSchéma Cinématique - 2020Mohsen LaabidiPas encore d'évaluation
- 4-Le Vocabulaire Des Formes de PièceDocument5 pages4-Le Vocabulaire Des Formes de PièceSegaAlainCoulibalyPas encore d'évaluation
- Devoir de Contrôle N°2 - Génie Mécanique - Machine À Pain - 3ème Technique (2016-2017) MR JEMAI LotfiDocument10 pagesDevoir de Contrôle N°2 - Génie Mécanique - Machine À Pain - 3ème Technique (2016-2017) MR JEMAI LotfiYoussef CherniPas encore d'évaluation
- TP3 Borne Réglable sujet+MEP PDFDocument8 pagesTP3 Borne Réglable sujet+MEP PDFdiopPas encore d'évaluation
- 21 Rep Coupe SectionsDocument8 pages21 Rep Coupe Sectionsyassine22100% (4)
- Corrigé Du Devoir de Contrôle N°1 - Génie Mécanique Butée Reglable - 3ème Technique (2010-2011) MDocument5 pagesCorrigé Du Devoir de Contrôle N°1 - Génie Mécanique Butée Reglable - 3ème Technique (2010-2011) MArfaoui Aymen100% (1)
- Cahier Des ChargesDocument4 pagesCahier Des ChargesMajda El-aouni0% (1)
- Sujet BEPDocument6 pagesSujet BEPMamadou GassamaPas encore d'évaluation
- EPREUVE - TECHNOLOGIE Génie Mécanique. Convoyeur À BandeDocument6 pagesEPREUVE - TECHNOLOGIE Génie Mécanique. Convoyeur À BandeYounes El GhandouriPas encore d'évaluation
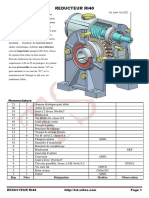
- REDUCTEUR RI40. REDUCTEUR RI40 Page 1. Vis Sans Fin (03) Arbre Creux de SortieDocument6 pagesREDUCTEUR RI40. REDUCTEUR RI40 Page 1. Vis Sans Fin (03) Arbre Creux de SortieFabrigas Kasolo Kalala100% (1)
- Serie Des TD N°4 Engrenages EMDocument6 pagesSerie Des TD N°4 Engrenages EMGrine Salah EddinePas encore d'évaluation
- TD1 Schéma Ciné Casse ÉcrouDocument2 pagesTD1 Schéma Ciné Casse ÉcrouAlami El100% (3)
- 05 ADocument5 pages05 Aapi-3767116100% (3)
- Alternateur c4Document5 pagesAlternateur c4fredliebautPas encore d'évaluation
- Sujet: Système de Production Par PoinçonnageDocument9 pagesSujet: Système de Production Par PoinçonnagefranzPas encore d'évaluation
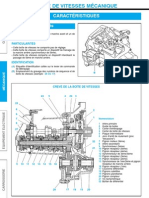
- Caractéristiques: GénéralitésDocument7 pagesCaractéristiques: GénéralitéssmPas encore d'évaluation
- Reduct EurDocument2 pagesReduct EurOUTEMSAA80% (5)
- Unite de Climatisation: Devoir de Controle #3Document3 pagesUnite de Climatisation: Devoir de Controle #3MoniaBenKhaledPas encore d'évaluation
- CHAP VI Leçon 1 TR Pignon Crémaillère Vis Ecrou.Document8 pagesCHAP VI Leçon 1 TR Pignon Crémaillère Vis Ecrou.Jaouher BakloutiPas encore d'évaluation
- Lopes CyrilDocument24 pagesLopes Cyrilemidio.lopes1018953Pas encore d'évaluation
- 19 Proj Fab MalaxeurDocument2 pages19 Proj Fab MalaxeurKaffelPas encore d'évaluation
- TD2 Correction CFAO1Document7 pagesTD2 Correction CFAO1Sheikh Al-shoteriPas encore d'évaluation
- Courroie de DistributionDocument16 pagesCourroie de DistributionRossi56100% (1)
- Filetage Avec Le Tour ED 750FDQDocument7 pagesFiletage Avec Le Tour ED 750FDQOscar AtienzaPas encore d'évaluation
- 04 Exercices Assemblage 1Document65 pages04 Exercices Assemblage 1AichaELJafoufiPas encore d'évaluation
- Catalogue D'outillage Caténaire - GeismarDocument104 pagesCatalogue D'outillage Caténaire - GeismarAymen67% (6)
- Tolerances Et Ajustements PDFDocument4 pagesTolerances Et Ajustements PDFGregory frissotPas encore d'évaluation
- M21 Calage Des Pompes D'injection REM-RMADocument56 pagesM21 Calage Des Pompes D'injection REM-RMAAbbes Raiss88% (8)
- 04 PDFDocument2 pages04 PDFLuis VelazquezPas encore d'évaluation
- Détermination Des Temps de Fabrication - Temps D'usinageDocument7 pagesDétermination Des Temps de Fabrication - Temps D'usinageZackaria El IdrissiPas encore d'évaluation
- Rapport de StageDocument22 pagesRapport de StageMehdi BouzianePas encore d'évaluation
- Caractériqtiques Régulateurs Woodward (FR) PDFDocument30 pagesCaractériqtiques Régulateurs Woodward (FR) PDFsuptedPas encore d'évaluation
- TP 1 - Doc Synthèse CorrigéDocument23 pagesTP 1 - Doc Synthèse CorrigéOumayma AssefraouiPas encore d'évaluation
- KC 1440ML 6 Manual FreDocument11 pagesKC 1440ML 6 Manual Frebatman2054Pas encore d'évaluation
- Pelle Liebherr 310Document2 pagesPelle Liebherr 310Liebherr100% (1)
- Grafcet 2Document14 pagesGrafcet 2DrazehaPas encore d'évaluation
- La Pose D'un Verrou Et D'une Serrure PDFDocument8 pagesLa Pose D'un Verrou Et D'une Serrure PDFMamou DeflaouiPas encore d'évaluation
- Pinacho 200 225 FRDocument46 pagesPinacho 200 225 FRgilmarto0% (1)
- Liaisons Brut Cour BM 1Document29 pagesLiaisons Brut Cour BM 1med0% (2)
- Cours M 2 CotationDocument11 pagesCours M 2 CotationPaulHochonPas encore d'évaluation
- Atelier de Structure D PDFDocument15 pagesAtelier de Structure D PDFYounes KaderPas encore d'évaluation
- CorroyeuseDocument5 pagesCorroyeuseapi-489017636100% (1)
- Materiel ManutentionDocument5 pagesMateriel Manutentionoutman31Pas encore d'évaluation
- 2016 1 Fichier Vocabulaire TechniqueDocument26 pages2016 1 Fichier Vocabulaire TechniqueYassineZklPas encore d'évaluation