Vous aimerez peut-être aussi
- PFE Domotique RapportDocument76 pagesPFE Domotique RapportAyoub Django RF78% (9)
- Rapport de Projet Fin D'étude:: Maison Intelligente Présenté ParDocument29 pagesRapport de Projet Fin D'étude:: Maison Intelligente Présenté ParEr-raqioui Hafsa100% (1)
- PFE FinalDocument61 pagesPFE FinalNisrine KermouchPas encore d'évaluation
- 07 La Domotique - PPSXDocument33 pages07 La Domotique - PPSXislammomentPas encore d'évaluation
- 46 DomotiqueDocument38 pages46 Domotiquefromsouth100% (2)
- Conception Et Realisation D Un Prototype PDFDocument126 pagesConception Et Realisation D Un Prototype PDFChouichi Ghada100% (1)
- TP3 Etalonnage Appreil de MesureDocument4 pagesTP3 Etalonnage Appreil de MesureDK KDPas encore d'évaluation
- MetrologieDocument229 pagesMetrologieDK KD0% (1)
- La SérialisationDocument27 pagesLa Sérialisationdossier15Pas encore d'évaluation
- Corriges Des Exercices Algorithme TOUS LES NIVEAUXDocument57 pagesCorriges Des Exercices Algorithme TOUS LES NIVEAUXAyoub Moustaouli79% (29)
- DomotiqueDocument28 pagesDomotiqueKhalil Meskar100% (1)
- AI PFE Smart House 2020-2021 - Jadani AyoubDocument68 pagesAI PFE Smart House 2020-2021 - Jadani AyoubZine el abedine MKPas encore d'évaluation
- ProjetDocument84 pagesProjetAit Essarghini Fatima EzzahraePas encore d'évaluation
- DomotiqueDocument29 pagesDomotiqueIsl FeninekhPas encore d'évaluation
- Maison Intelligente: ThèmeDocument25 pagesMaison Intelligente: ThèmeAng VilPas encore d'évaluation
- Conception D'une Maison Intélligente Avec Arduino (1) .Docx - 0Document58 pagesConception D'une Maison Intélligente Avec Arduino (1) .Docx - 0Yorrick Valquin Ngouyou100% (1)
- 604 PDFDocument81 pages604 PDFRroouuffaa Abbes100% (2)
- DomotiqueDocument76 pagesDomotiqueMariusPas encore d'évaluation
- PDF Conception Et Realisation Dx27un Ahmed Mabrouk 4768 CompressDocument40 pagesPDF Conception Et Realisation Dx27un Ahmed Mabrouk 4768 CompressHamdi GdhamiPas encore d'évaluation
- PFE Domotique RapportDocument76 pagesPFE Domotique RapportBadreddinePas encore d'évaluation
- Rapport Projet Domotique 1214754423842766 9Document26 pagesRapport Projet Domotique 1214754423842766 9Hela Ahmed50% (2)
- Maison IntélligenteDocument75 pagesMaison IntélligenteJawher SalemPas encore d'évaluation
- KRAMA Abdelbasset GOUGUI Abdelmoumen PDFDocument77 pagesKRAMA Abdelbasset GOUGUI Abdelmoumen PDFspeedov73Pas encore d'évaluation
- Domotique-Helix by M. KonatéDocument19 pagesDomotique-Helix by M. KonatéKhadim GueyePas encore d'évaluation
- Maison IntelligenteDocument85 pagesMaison IntelligenteFedi BayoudhiPas encore d'évaluation
- La DomotiqueDocument18 pagesLa Domotiquemed smiPas encore d'évaluation
- DOMOTIQUEDocument16 pagesDOMOTIQUEHenry Briones100% (1)
- Do MotiqueDocument19 pagesDo MotiqueRaoudha MbPas encore d'évaluation
- Rapport K.B 2020 Bon PDFDocument59 pagesRapport K.B 2020 Bon PDFbasile kamdem100% (2)
- Formation ESP8266Document13 pagesFormation ESP8266tayari_lPas encore d'évaluation
- Chapitre 1: Définition de La DomotiqueDocument5 pagesChapitre 1: Définition de La DomotiqueOussama benmouffokPas encore d'évaluation
- 46 DomotiqueDocument38 pages46 DomotiqueRouissi AblaPas encore d'évaluation
- IMADDocument40 pagesIMADAyoub BouafiaPas encore d'évaluation
- Conception Et Réalisation D'un Smart Home: Internet of ThingsDocument30 pagesConception Et Réalisation D'un Smart Home: Internet of ThingsFahssi AhmedPas encore d'évaluation
- Maison IntellegentDocument22 pagesMaison IntellegentRawand MaemounPas encore d'évaluation
- Realisation D Une Maison Intelligente ADocument48 pagesRealisation D Une Maison Intelligente Alahceneljandouz358Pas encore d'évaluation
- PFE Yassine 04072021Document32 pagesPFE Yassine 04072021SinoRex100% (3)
- Cahier de Charge de La Maison IntelligenteDocument1 pageCahier de Charge de La Maison IntelligentePagnol Nouga100% (1)
- La Gestion D'une Maison Intelligente Avec Les Réseaux M2M Et IoT (Enregistré Automatiquement) - 2 PDFDocument68 pagesLa Gestion D'une Maison Intelligente Avec Les Réseaux M2M Et IoT (Enregistré Automatiquement) - 2 PDFAicha El ArmaniPas encore d'évaluation
- Pfe - Smart - Car (2) (Récupération Automatique)Document43 pagesPfe - Smart - Car (2) (Récupération Automatique)Anas EdkiouakPas encore d'évaluation
- Cours Et TP - Arduino PDFDocument14 pagesCours Et TP - Arduino PDFYoussef Aguichar100% (1)
- Projet de Fin D'études: Réalisation D'une Maison Intelligente À Base D'arduinoDocument7 pagesProjet de Fin D'études: Réalisation D'une Maison Intelligente À Base D'arduinoBadreddinePas encore d'évaluation
- Conception Et Réalisation D'une MaisonDocument66 pagesConception Et Réalisation D'une MaisonMOHAMED ALI OTHMANPas encore d'évaluation
- BelaidiThiziri HaddadNaimaDocument80 pagesBelaidiThiziri HaddadNaimasatima omPas encore d'évaluation
- Systeme D'irrigationDocument45 pagesSysteme D'irrigationlaabissiPas encore d'évaluation
- Utiliser Un Capteur de Courant SCT013 Et Un Arduino PDFDocument2 pagesUtiliser Un Capteur de Courant SCT013 Et Un Arduino PDFWalid AmriPas encore d'évaluation
- RapportDocument61 pagesRapportHoussem OuniPas encore d'évaluation
- Conception Et Realisation D'un - Ahmed MABROUK - 4768Document53 pagesConception Et Realisation D'un - Ahmed MABROUK - 4768News of The World100% (1)
- Projet: Commande D'un Panneau Solaire AutopilotéDocument52 pagesProjet: Commande D'un Panneau Solaire AutopilotéAnonymous eYaYLpnZ81% (16)
- Chapitre 1 - DomotiqueDocument8 pagesChapitre 1 - Domotiquebsamatrbs50% (2)
- Projet de Fin Detudes Realisation Dune M PDFDocument58 pagesProjet de Fin Detudes Realisation Dune M PDF123456789doux100% (1)
- Projet de Fin Detudes Realisation Dune MDocument58 pagesProjet de Fin Detudes Realisation Dune MBadreddinePas encore d'évaluation
- Etude Et Conception D'une Maison Intelligente Alimentée Par L'énergie SolaireDocument82 pagesEtude Et Conception D'une Maison Intelligente Alimentée Par L'énergie SolaireWilfried TuegnoPas encore d'évaluation
- Arduino Cours Sept2018 PDFDocument111 pagesArduino Cours Sept2018 PDFyassinePas encore d'évaluation
- Conception Et Realisation D'un - Badr Eddine BELKARCHI - 4825Document41 pagesConception Et Realisation D'un - Badr Eddine BELKARCHI - 4825fatimaPas encore d'évaluation
- Cours Domotique 10Document112 pagesCours Domotique 10Aline Luiza Lima Leite100% (2)
- InternetDesObjets 2Document36 pagesInternetDesObjets 2Assad DaviesPas encore d'évaluation
- Telemetre Arduino LabviewDocument10 pagesTelemetre Arduino LabviewJavier RodriguezPas encore d'évaluation
- Systèmes De Communication Véhiculaire: Les perspectives d'avenir du transport intelligentD'EverandSystèmes De Communication Véhiculaire: Les perspectives d'avenir du transport intelligentPas encore d'évaluation
- Grille Intelligente: Échange d'électricité et d'informations entre les maisons et les centrales électriquesD'EverandGrille Intelligente: Échange d'électricité et d'informations entre les maisons et les centrales électriquesPas encore d'évaluation
- Detection des collisions dans les jeux video 2D: avec C#5, WPF et Visual Studio 2013D'EverandDetection des collisions dans les jeux video 2D: avec C#5, WPF et Visual Studio 2013Pas encore d'évaluation
- Maison zéro consommation : Mode d'emploiD'EverandMaison zéro consommation : Mode d'emploiPas encore d'évaluation
- Chapitre Vi Part1 Tdma FdmaDocument16 pagesChapitre Vi Part1 Tdma FdmaDK KDPas encore d'évaluation
- Cours Systemes Communications NumeriquesDocument17 pagesCours Systemes Communications NumeriquesDK KDPas encore d'évaluation
- Transmission Numerique en Bande de BaseDocument34 pagesTransmission Numerique en Bande de BaseDK KDPas encore d'évaluation
- Chapitre 1 Fonction Securite Dans EntrepriseDocument5 pagesChapitre 1 Fonction Securite Dans EntrepriseDK KD100% (4)
- Beamex White Paper - Paperless Calibration Improves Quality FRADocument5 pagesBeamex White Paper - Paperless Calibration Improves Quality FRADK KDPas encore d'évaluation
- Annuaire CFM2017 BDDocument148 pagesAnnuaire CFM2017 BDDK KDPas encore d'évaluation
- Gestion Metrologie 2015 2016Document6 pagesGestion Metrologie 2015 2016DK KDPas encore d'évaluation
- TP Leea3 ACDocument53 pagesTP Leea3 ACDK KDPas encore d'évaluation
- Rezigue HamzaDocument173 pagesRezigue HamzaDK KDPas encore d'évaluation
- TP3 Partage MultiDocument3 pagesTP3 Partage MultiDK KDPas encore d'évaluation
- Cours Asservissement Part 2Document37 pagesCours Asservissement Part 2DK KDPas encore d'évaluation
- 2013 05 Algérie Organisme AgréésDocument7 pages2013 05 Algérie Organisme AgréésDK KDPas encore d'évaluation
- AlgeracDocument29 pagesAlgeracDK KDPas encore d'évaluation
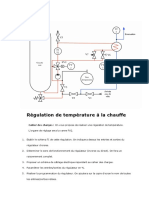
- Regulation Numerique TempDocument36 pagesRegulation Numerique TempDK KDPas encore d'évaluation
- Gestion Des Impressions Et Diffusions Documentaires SapDocument30 pagesGestion Des Impressions Et Diffusions Documentaires Sapselmorabiti100% (1)
- 1 - Exercice 1Document4 pages1 - Exercice 1Si Mo WacPas encore d'évaluation
- SapDocument2 pagesSapAziz ChPas encore d'évaluation
- Daaif Cours CSSDocument17 pagesDaaif Cours CSSSalem Ben Nasr100% (2)
- Pseudo CodeDocument3 pagesPseudo CodeBiram DioufPas encore d'évaluation
- 00 - Javascript - MemoDocument13 pages00 - Javascript - MemoVlad FrunzaPas encore d'évaluation
- ExosqlDocument4 pagesExosqlammo77Pas encore d'évaluation
- Guide de Saisie Des Données Fichier Collecte Informations EntrepriseDocument7 pagesGuide de Saisie Des Données Fichier Collecte Informations EntrepriseAlexandre NDOUNAPas encore d'évaluation
- Construction N, Z Et QDocument21 pagesConstruction N, Z Et QIMARPas encore d'évaluation
- LOTUS SPAS by Vajda Spas GAMME 2009 1 FRADocument2 pagesLOTUS SPAS by Vajda Spas GAMME 2009 1 FRAf_blaiseauPas encore d'évaluation
- QCM - AdmSecDocument2 pagesQCM - AdmSecKhlifi Assil0% (1)
- Chapitre 2 - La SegmentationDocument1 pageChapitre 2 - La SegmentationRomain MéressePas encore d'évaluation
- Demande Offre + ReponseDocument2 pagesDemande Offre + ReponsekarmaelfPas encore d'évaluation
- AngularDocument8 pagesAngularSouleymane TraorePas encore d'évaluation
- TP OfdmDocument3 pagesTP Ofdmhassan ABDELMOUNIM0% (2)
- Dénombrement Dénombrement DénombrementDocument8 pagesDénombrement Dénombrement Dénombrementnayrouz ayadiPas encore d'évaluation
- Vmware Tools Installation Configuration FRDocument54 pagesVmware Tools Installation Configuration FRAbdelilah MaloukPas encore d'évaluation
- These Manel SGHAIER Finale PDFDocument326 pagesThese Manel SGHAIER Finale PDFAMEL GAOUDPas encore d'évaluation
- Résolution Des Équations Du Troisième DegréDocument7 pagesRésolution Des Équations Du Troisième DegréFabien RivronPas encore d'évaluation
- Vsphere Esxi Vcenter Server 51 Installation Setup GuideDocument342 pagesVsphere Esxi Vcenter Server 51 Installation Setup GuideSofyen TototototoPas encore d'évaluation
- Fiche Du TP n2Document9 pagesFiche Du TP n2HafidPas encore d'évaluation
- Ex-2015-2016-Session1-Corrige - CopieDocument12 pagesEx-2015-2016-Session1-Corrige - Copiebahmed HakiPas encore d'évaluation
- Proposition de Charte ArchivesDocument13 pagesProposition de Charte Archivesnasrudin66Pas encore d'évaluation
- ExamDocument2 pagesExamSaad Ettahiri0% (1)
- Elaboration Dun Modele Theorique DevaluaDocument11 pagesElaboration Dun Modele Theorique Devaluajacques EDOHPas encore d'évaluation
- TP SoukkouDocument21 pagesTP SoukkoulotfibouchefiratPas encore d'évaluation
- Conception Et Réalisation Oracle (Livre Blanc de Stéphane Grare)Document167 pagesConception Et Réalisation Oracle (Livre Blanc de Stéphane Grare)Stéphane GrarePas encore d'évaluation
- Cours IP MobileDocument158 pagesCours IP MobileZmaiin ChernicovPas encore d'évaluation