Vous aimerez peut-être aussi
- Projets Arduino avec Tinkercad | Partie 2: Concevoir des projets électroniques avancés basés sur Arduino avec TinkercadD'EverandProjets Arduino avec Tinkercad | Partie 2: Concevoir des projets électroniques avancés basés sur Arduino avec TinkercadPas encore d'évaluation
- MAITRISER Python : De l'Apprentissage aux Projets ProfessionnelsD'EverandMAITRISER Python : De l'Apprentissage aux Projets ProfessionnelsPas encore d'évaluation
- Grille Intelligente: Échange d'électricité et d'informations entre les maisons et les centrales électriquesD'EverandGrille Intelligente: Échange d'électricité et d'informations entre les maisons et les centrales électriquesPas encore d'évaluation
- Travaux Pratique stm32 tp2Document11 pagesTravaux Pratique stm32 tp2lola itta100% (2)
- Cours - Programmation C Pour Systèmes EmbarquésDocument53 pagesCours - Programmation C Pour Systèmes EmbarquéssouilelyPas encore d'évaluation
- Compt-Rendu TP1 MicroprocessDocument6 pagesCompt-Rendu TP1 MicroprocessWaheb Ard100% (2)
- Rapport TP VHDLDocument42 pagesRapport TP VHDLEl faalah Medayman100% (2)
- Corrigé Partiel VHDL FPGA M1 ELN SE 2020Document6 pagesCorrigé Partiel VHDL FPGA M1 ELN SE 2020yasmine hmn100% (1)
- Série 3 - Bis - Programmation Assembleur 8085Document3 pagesSérie 3 - Bis - Programmation Assembleur 8085Rottina RossyPas encore d'évaluation
- Compte RenduDocument10 pagesCompte RenduEgillPas encore d'évaluation
- Tp1 Arduino ProteusDocument6 pagesTp1 Arduino ProteusSaida HalouiPas encore d'évaluation
- Compte Rendu TP1Document11 pagesCompte Rendu TP1zakaria zezezzePas encore d'évaluation
- TP Informatique IndustrielleDocument7 pagesTP Informatique IndustrielleYoussef_Consty_4665100% (3)
- Examen Corrigé Informatique Industriel - Univ M'Sila, 2019Document3 pagesExamen Corrigé Informatique Industriel - Univ M'Sila, 2019AYOUB RIADPas encore d'évaluation
- TD Supervision CorrigéDocument10 pagesTD Supervision CorrigéSana GassémPas encore d'évaluation
- Conception Et Realisation Dune Carte deDocument18 pagesConception Et Realisation Dune Carte degorig100% (4)
- TD 1 Info Indus 2019-2020Document3 pagesTD 1 Info Indus 2019-2020Romaric Tankoano100% (4)
- 7segments VHDLDocument5 pages7segments VHDLSoufiane BoulachgourPas encore d'évaluation
- TP 1Document6 pagesTP 1Samir Boss100% (1)
- Projet À Microcontrôleur PIC 16F876ADocument12 pagesProjet À Microcontrôleur PIC 16F876Aهشام هشام المسيلة0% (1)
- TDu CDocument49 pagesTDu CnawzatPas encore d'évaluation
- TP MicrocontrôleurDocument38 pagesTP MicrocontrôleurNourallah Aouina100% (3)
- Décodage Adresse1 ProfDocument7 pagesDécodage Adresse1 ProfBlaugranaPas encore d'évaluation
- Compte Rendu Du TP PIC16F877 Par AIMANE BOURASSDocument13 pagesCompte Rendu Du TP PIC16F877 Par AIMANE BOURASSAyman Brs100% (1)
- TP N°1 M1 Embarqué MicrocontrôleurDocument2 pagesTP N°1 M1 Embarqué Microcontrôleurعمر الفاروقPas encore d'évaluation
- Asservissement de Vitesse D Un Moteur À Courant Continu À L Aide de La Carte Arduino UNODocument28 pagesAsservissement de Vitesse D Un Moteur À Courant Continu À L Aide de La Carte Arduino UNOSimo BounaPas encore d'évaluation
- Uef1212 TP1 2020Document74 pagesUef1212 TP1 2020hit masterPas encore d'évaluation
- 2020 2021 Représentation D'état Chapitre 3Document25 pages2020 2021 Représentation D'état Chapitre 3Mounaim MatiniPas encore d'évaluation
- tp3 Ing 2015 PDFDocument7 pagestp3 Ing 2015 PDFDorian GreyPas encore d'évaluation
- Programmation Des PIC en C Part2Document34 pagesProgrammation Des PIC en C Part2marocainissamPas encore d'évaluation
- Processeur 6809Document172 pagesProcesseur 6809Oumar Mané50% (10)
- NST10120092010Document6 pagesNST10120092010NajimMdiPas encore d'évaluation
- TP Informatique IndustrielleDocument39 pagesTP Informatique IndustrielleWejdène GuedriPas encore d'évaluation
- République Algérienne Démocratique Et Populaire: TP 2: Initialisation Au Développement Des Cartes Avec PIC 16F84ADocument10 pagesRépublique Algérienne Démocratique Et Populaire: TP 2: Initialisation Au Développement Des Cartes Avec PIC 16F84Aclouse12Pas encore d'évaluation
- Projet Électronique - Serrure Codée À Base Du Microcontrôleur PIC16F877Document14 pagesProjet Électronique - Serrure Codée À Base Du Microcontrôleur PIC16F877abdouPas encore d'évaluation
- Commande D'un Moteur Pas-A-pas - Youness KHARCHOUFA - 4045Document41 pagesCommande D'un Moteur Pas-A-pas - Youness KHARCHOUFA - 4045BtissamBetty100% (1)
- Transformée en Z PDFDocument9 pagesTransformée en Z PDFAchraf BoutalPas encore d'évaluation
- Réseaux Locaux IndustrielsDocument91 pagesRéseaux Locaux IndustrielsHajar Touil100% (1)
- MicroprocesseurDocument7 pagesMicroprocesseurwalidjoePas encore d'évaluation
- Robot Suiveur Delingne ConcepDocument16 pagesRobot Suiveur Delingne ConcepAchraf Alaoui100% (1)
- Mini Projet CapteurDocument7 pagesMini Projet CapteurFatima100% (1)
- TP Fpga Cyclone2Document3 pagesTP Fpga Cyclone2red-allPas encore d'évaluation
- 1-STM32 GPIO RegDocument59 pages1-STM32 GPIO RegSoumri IchrakPas encore d'évaluation
- Test 2 Systemes SequentielsDocument6 pagesTest 2 Systemes SequentielsChristianPas encore d'évaluation
- Compte-Rendu EspDocument23 pagesCompte-Rendu Espbilel100% (2)
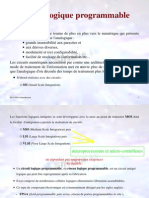
- Introduction Circuits Logiques Programmables - Presentation 2010Document38 pagesIntroduction Circuits Logiques Programmables - Presentation 2010fieea100% (2)
- Introduction Aux MC STM32 PDFDocument9 pagesIntroduction Aux MC STM32 PDFZied HouanebPas encore d'évaluation
- 68HC11Document22 pages68HC11Amin Elhamzaoui67% (3)
- CoursmicroreduitDocument87 pagesCoursmicroreduitapi-3826166100% (2)
- Fascicule de TP FpgaDocument32 pagesFascicule de TP FpgaHichem HamdiPas encore d'évaluation
- TP1 FpgaDocument6 pagesTP1 Fpgasaid100% (1)
- Exercice de Programmation MikroC LCDDocument13 pagesExercice de Programmation MikroC LCDIbrahima Gueye100% (3)
- TD 1 MicroControleurDocument1 pageTD 1 MicroControleurimenenouvelle100% (1)
- Exercice 0:: Tp1: Architecture Des MicrocontroleursDocument3 pagesExercice 0:: Tp1: Architecture Des MicrocontroleursأمينPas encore d'évaluation
- Arduino | Pas à pas: Le guide ultime du débutantD'EverandArduino | Pas à pas: Le guide ultime du débutantPas encore d'évaluation
- L'Électricité - Découvreurs et Inventeurs: Tome IVD'EverandL'Électricité - Découvreurs et Inventeurs: Tome IVÉvaluation : 3 sur 5 étoiles3/5 (2)
- Comment construire son drone de zéro: Comment construire son drone et dimensionner les différentes partiesD'EverandComment construire son drone de zéro: Comment construire son drone et dimensionner les différentes partiesÉvaluation : 2 sur 5 étoiles2/5 (1)
- Les OscillateursDocument9 pagesLes Oscillateursحنيش يوسف0% (1)
- (1WEB) LabsDocument27 pages(1WEB) LabsCoul AdamoPas encore d'évaluation
- Ez 370Document8 pagesEz 370Dada AndryPas encore d'évaluation
- Parcours Contestation - ANTAIDocument1 pageParcours Contestation - ANTAIcdhehbiaPas encore d'évaluation
- Memo Planigo Nov2008Document44 pagesMemo Planigo Nov2008Sékou KABAPas encore d'évaluation
- CvDétaillé-Jean Bosco NSEKUYEDocument3 pagesCvDétaillé-Jean Bosco NSEKUYEJean NsekuyePas encore d'évaluation
- Activité2 2Document5 pagesActivité2 2Nourhen ChaaouiPas encore d'évaluation
- Windows Live Movie MakerDocument5 pagesWindows Live Movie MakerArou N'aPas encore d'évaluation
- AmdecDocument12 pagesAmdecSimo BoumahrachiPas encore d'évaluation
- Chap 1Document3 pagesChap 1أيمن أيمنPas encore d'évaluation
- Arduino MegaDocument5 pagesArduino MegaKasi FilsPas encore d'évaluation
- Manuel Utilisation FerracadDocument13 pagesManuel Utilisation FerracadOussama StinsonPas encore d'évaluation
- CYPECAD - Manuel de L'utilisateurDocument50 pagesCYPECAD - Manuel de L'utilisateurDialseny Dalaba100% (2)
- Cours PHP - LES BASES DE DONNEES MYSQL 1ERE PARTIEDocument11 pagesCours PHP - LES BASES DE DONNEES MYSQL 1ERE PARTIEJaminben GbegoPas encore d'évaluation
- Planification Des Soutenances Des PFEs-V1Document3 pagesPlanification Des Soutenances Des PFEs-V1Yassine KadriPas encore d'évaluation
- Manuel 11 Syst Me D Iformation G Ographique Sig Dgemrh OnDocument52 pagesManuel 11 Syst Me D Iformation G Ographique Sig Dgemrh OnSecretaires.juridiquesPas encore d'évaluation
- IOPI-Commandes Ligne-P3Document8 pagesIOPI-Commandes Ligne-P3Youssef BourarPas encore d'évaluation
- 2ZZ1303 Syl1 1Document70 pages2ZZ1303 Syl1 158024Pas encore d'évaluation
- Cloud ComputingDocument41 pagesCloud ComputingAbdellatif100% (1)
- Suivi Des Investissements1Document8 pagesSuivi Des Investissements1hardykimfumu71Pas encore d'évaluation
- Edf R&D: Code Saturne DocumentationDocument39 pagesEdf R&D: Code Saturne DocumentationOmar FaroukPas encore d'évaluation
- TP2 JavaDocument2 pagesTP2 JavaMohamedReda SaidiPas encore d'évaluation
- Planete HDocument21 pagesPlanete HMbenguePas encore d'évaluation
- Étude Et Mise en Place D'une Solution VOIP S0écuriséeDocument94 pagesÉtude Et Mise en Place D'une Solution VOIP S0écuriséeMohssin Fsjes67% (3)
- DLS.300 0406Document8 pagesDLS.300 0406Alain DefoePas encore d'évaluation
- Mecheri KarimaDocument107 pagesMecheri Karimakhalil merzouguiPas encore d'évaluation
- Mat2101 Feuille Route BBDocument6 pagesMat2101 Feuille Route BBacretelafPas encore d'évaluation
- F T Tarif Skylux IdomeDocument3 pagesF T Tarif Skylux Idomeice 4youPas encore d'évaluation
- Compte Rendu Du TP Régulation IndustrielleDocument9 pagesCompte Rendu Du TP Régulation IndustrielleJamilJaoua100% (3)
- Courrier Electronique Windows MailDocument3 pagesCourrier Electronique Windows MailBelhamissiPas encore d'évaluation