Vous aimerez peut-être aussi
- Corrigegradateur 1415Document4 pagesCorrigegradateur 1415rabehvilla100% (1)
- Théorie et conception des filtres analogiques, 2e édition: Avec MatlabD'EverandThéorie et conception des filtres analogiques, 2e édition: Avec MatlabPas encore d'évaluation
- 5 Cours AresDocument23 pages5 Cours AresAwatef MekkiPas encore d'évaluation
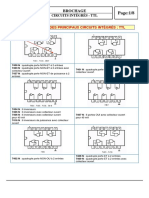
- Brochage Des Principaux CI-TTL PDFDocument8 pagesBrochage Des Principaux CI-TTL PDFFerjani Mohamed100% (1)
- Le système d'approvisionnement en terres dans les villes d'Afrique de l'Ouest: L’exemple de BamakoD'EverandLe système d'approvisionnement en terres dans les villes d'Afrique de l'Ouest: L’exemple de BamakoPas encore d'évaluation
- CHAPITRE II Circuits Séquentiels PDFDocument35 pagesCHAPITRE II Circuits Séquentiels PDFTimble PuteurPas encore d'évaluation
- Récupération D'Énergie: Transformer l'énergie ambiante présente dans l'environnement en énergie électriqueD'EverandRécupération D'Énergie: Transformer l'énergie ambiante présente dans l'environnement en énergie électriquePas encore d'évaluation
- Cours - Composants Logiques Programmables Et VHDLDocument141 pagesCours - Composants Logiques Programmables Et VHDLYoussef Elalaoui0% (1)
- Cours Labview 09Document66 pagesCours Labview 09hassenbb100% (1)
- Chapitre 4 Analyse en Régime SinusoïdalDocument3 pagesChapitre 4 Analyse en Régime SinusoïdalsalimiyounessPas encore d'évaluation
- Chap. 1 TTL CMOSDocument15 pagesChap. 1 TTL CMOSGhazi DayehPas encore d'évaluation
- Chapitre 3 Filtrage Signaux Deterministes Temps ContinuDocument7 pagesChapitre 3 Filtrage Signaux Deterministes Temps Continuarbaoui11Pas encore d'évaluation
- Multiplexeur PDFDocument10 pagesMultiplexeur PDFtarikmlilasPas encore d'évaluation
- A22-Opérations D'arithmétique Binaire - v19 - 2Document6 pagesA22-Opérations D'arithmétique Binaire - v19 - 2Rafik Ben AmorPas encore d'évaluation
- Travaux Pratiques Electronique NumériqueDocument10 pagesTravaux Pratiques Electronique NumériqueOumaima RhayaPas encore d'évaluation
- Rapport de - Projet RobotinoDocument26 pagesRapport de - Projet RobotinoZaroui Benamor AliPas encore d'évaluation
- Décodeur Et CodeurDocument12 pagesDécodeur Et CodeurOUINOU NGASSALA RomainPas encore d'évaluation
- LesmemoiresDocument44 pagesLesmemoiresouissemPas encore d'évaluation
- TP Moto 6809Document7 pagesTP Moto 6809gamerzxs681Pas encore d'évaluation
- Rapport de AKAFFOUDocument16 pagesRapport de AKAFFOUkpea chris dylanPas encore d'évaluation
- Corrigé Type Examen Final Microprocesseurs Et API Master ELMDocument4 pagesCorrigé Type Examen Final Microprocesseurs Et API Master ELMMohammed ALMUSHIAAPas encore d'évaluation
- TDDocument10 pagesTDredPas encore d'évaluation
- ! Exercices - Systemes-Sequentiels - Fonctions-MémoiresDocument9 pages! Exercices - Systemes-Sequentiels - Fonctions-MémoiresTimo ShmittPas encore d'évaluation
- TP1 Len62 PDFDocument5 pagesTP1 Len62 PDFbengheniaPas encore d'évaluation
- Chapitre 2 - SNL - Plan de PhaseDocument9 pagesChapitre 2 - SNL - Plan de PhaseFe ThiPas encore d'évaluation
- Exercice Sur Le Transcodeur GRAY-binaire-corrigeDocument1 pageExercice Sur Le Transcodeur GRAY-binaire-corrigeChichi HachemiPas encore d'évaluation
- TH Capteur 1Document30 pagesTH Capteur 1mehdiHRPas encore d'évaluation
- Fox G20Document21 pagesFox G20Omar Zemrani100% (1)
- Rapport Brohage Des AOPDocument5 pagesRapport Brohage Des AOPAli Moustapha NourPas encore d'évaluation
- Verins Pneumatiques E12c-2Document2 pagesVerins Pneumatiques E12c-2dsiscnPas encore d'évaluation
- Correction TD3 ENPDocument17 pagesCorrection TD3 ENPgolden aaaPas encore d'évaluation
- Compte Rendu TP4 CSDDocument9 pagesCompte Rendu TP4 CSDRyzeFrodexPas encore d'évaluation
- 4 Logique Sequentielle PDFDocument24 pages4 Logique Sequentielle PDFkhocinePas encore d'évaluation
- TP Initiation A La Programmation Du C PIC 16F84A en Mikro CDocument6 pagesTP Initiation A La Programmation Du C PIC 16F84A en Mikro CPaty MuyengwaPas encore d'évaluation
- TP5-1 FeuxDocument6 pagesTP5-1 FeuxsakiinaPas encore d'évaluation
- TD02Document3 pagesTD02Aicha B'mhPas encore d'évaluation
- TD ENP LP Composants RedresseursDocument4 pagesTD ENP LP Composants RedresseursNouh Hamnal100% (1)
- TD Regul PDFDocument11 pagesTD Regul PDFSouhaib LoudaPas encore d'évaluation
- Book 1Document15 pagesBook 1Hossam EddinPas encore d'évaluation
- Microprocesseur 6809 - ExpoDocument44 pagesMicroprocesseur 6809 - ExpoZAAIRA HAMZAPas encore d'évaluation
- Tavaux DirigésDocument2 pagesTavaux DirigésHakimAgüeroPas encore d'évaluation
- Travail DemandeDocument4 pagesTravail DemandeMike NkouetchaPas encore d'évaluation
- Chap6 - Les Registres Et CompteursDocument12 pagesChap6 - Les Registres Et CompteursMOHAMED AIT HADDOUCHPas encore d'évaluation
- ECE 2004-Corrige PDFDocument6 pagesECE 2004-Corrige PDFbaydiPas encore d'évaluation
- TP E. Numérique (EEA)Document38 pagesTP E. Numérique (EEA)Tas ManPas encore d'évaluation
- Les Compteurs Et Les Décompteurs.Document19 pagesLes Compteurs Et Les Décompteurs.Khadija Ait MhamedPas encore d'évaluation
- Les Bascules BistablesDocument8 pagesLes Bascules BistablesTopina Rahim100% (1)
- Tp3 Mux DemuxDocument6 pagesTp3 Mux DemuxAliou DialloPas encore d'évaluation
- Commande Electronique Des Machines ElectriquesDocument28 pagesCommande Electronique Des Machines ElectriqueshassenbbPas encore d'évaluation
- Filtres ActifsDocument3 pagesFiltres ActifsMouad Elmekaoui100% (1)
- Commande en EPDocument25 pagesCommande en EPAbdelkader AlgérienPas encore d'évaluation
- Mikro CDocument23 pagesMikro COUSKRIPas encore d'évaluation
- Test 1 Systemes SequentielsDocument4 pagesTest 1 Systemes SequentielsChristianPas encore d'évaluation
- tp1 - Prise en Main de Lemulateur Emu8086 Et ArchitectureDocument2 pagestp1 - Prise en Main de Lemulateur Emu8086 Et Architecturewalid kahlounPas encore d'évaluation
- Temporisation Logicielle 68HC11 PDFDocument2 pagesTemporisation Logicielle 68HC11 PDFTOUFIQPas encore d'évaluation
- Cours Systémes Echantillonnés 1Document13 pagesCours Systémes Echantillonnés 1Shompinho Matloaa100% (1)
- TD 1 - Analyse II - CorrectionDocument8 pagesTD 1 - Analyse II - CorrectionHamza BouzammitPas encore d'évaluation
- Ado 1ap 21-22 TD4Document2 pagesAdo 1ap 21-22 TD4Hamza BoutlihPas encore d'évaluation
- Connaissances RecommandeesDocument7 pagesConnaissances RecommandeesBobby StayPas encore d'évaluation
- TP - LCS - Séance 1Document1 pageTP - LCS - Séance 1hlm100% (2)
- Electronique Numérique Lie Cned 2 Année. Analyse Et Synthèse Des Systèmes SéquentielsDocument170 pagesElectronique Numérique Lie Cned 2 Année. Analyse Et Synthèse Des Systèmes SéquentielsAnonymous 52meuyHlGm100% (1)
- Devoir de Contrôle N°2 - Génie Électrique - Bac Technique (2012-2013) MR Abdallah RAOUAFIDocument4 pagesDevoir de Contrôle N°2 - Génie Électrique - Bac Technique (2012-2013) MR Abdallah RAOUAFIAmira JebaliPas encore d'évaluation
- TD4 2022 CombinatoireDocument2 pagesTD4 2022 CombinatoireAhmed Doghmi100% (1)
- Etld Mi s2 STRM 2015 2016 CorrigeDocument7 pagesEtld Mi s2 STRM 2015 2016 CorrigeRe Sab RinaPas encore d'évaluation
- E C Compteurs Asynchrones 2Document10 pagesE C Compteurs Asynchrones 2Mohamed MathématicienPas encore d'évaluation
- TPDocument12 pagesTPAhmed AttaouiPas encore d'évaluation
- Chap 3Document10 pagesChap 3mohcenPas encore d'évaluation
- Chap2 Circuits CombinatoiresDocument34 pagesChap2 Circuits CombinatoiresASSIA SAOUDIPas encore d'évaluation
- Chapitre 6 Les Circuits CombinatoiresDocument25 pagesChapitre 6 Les Circuits Combinatoireskouame narcisse kouakouPas encore d'évaluation
- Modes D AdressageDocument26 pagesModes D Adressagebasma hassaniPas encore d'évaluation
- TD5 CNDocument4 pagesTD5 CNPapeCheikh SYLLAPas encore d'évaluation
- Cours FpgaDocument33 pagesCours Fpgaso heibPas encore d'évaluation
- Méthode de Synthèse Des Compteurs SynchronesDocument9 pagesMéthode de Synthèse Des Compteurs SynchronesNarkhiss TaPas encore d'évaluation
- Merged 20200609 191118Document8 pagesMerged 20200609 191118Angeauden DidoPas encore d'évaluation
- Exos de Logique SéquentielleDocument5 pagesExos de Logique SéquentielleSabrine Khoualdi100% (1)
- Serie N1Document9 pagesSerie N1khalifakarouiPas encore d'évaluation
- TPBAC2023Document128 pagesTPBAC2023labossefPas encore d'évaluation
- Examen Fin de Module Année de Formation: 2020/2021 Module N°: 19 Intitulé: Logique SequentielleDocument3 pagesExamen Fin de Module Année de Formation: 2020/2021 Module N°: 19 Intitulé: Logique SequentielleBilal FitsemPas encore d'évaluation
- Examen VHDL +correction 1ere Session 2008Document5 pagesExamen VHDL +correction 1ere Session 2008Med0% (1)
- Cours de Registres Num Riques 2015-2016Document28 pagesCours de Registres Num Riques 2015-2016leila settiPas encore d'évaluation
- Les BasculesDocument20 pagesLes BasculesakremibechirPas encore d'évaluation
- Algèbre Et Logique CombinatoireDocument34 pagesAlgèbre Et Logique CombinatoireNihal DakkounePas encore d'évaluation
- Compte UrsDocument11 pagesCompte Ursmaiga mohamedPas encore d'évaluation
- Cours Logiques Sequentielles Comptage DecomptageDocument6 pagesCours Logiques Sequentielles Comptage DecomptageCephas WogninPas encore d'évaluation
- Les BasculesDocument14 pagesLes BasculesDjouweinannodji Yves100% (1)
- TP Bind9Document379 pagesTP Bind9Mariam MaaroufPas encore d'évaluation
- Examauto 8Document11 pagesExamauto 8ak penPas encore d'évaluation
- Decodeur 7Document1 pageDecodeur 7khaled fawazPas encore d'évaluation
- Le guide du hacker : le guide simplifié du débutant pour apprendre les bases du hacking avec Kali LinuxD'EverandLe guide du hacker : le guide simplifié du débutant pour apprendre les bases du hacking avec Kali LinuxÉvaluation : 5 sur 5 étoiles5/5 (2)
- Wi-Fi Hacking avec kali linux Guide étape par étape : apprenez à pénétrer les réseaux Wifi et les meilleures stratégies pour les sécuriserD'EverandWi-Fi Hacking avec kali linux Guide étape par étape : apprenez à pénétrer les réseaux Wifi et les meilleures stratégies pour les sécuriserPas encore d'évaluation
- Apprendre Python rapidement: Le guide du débutant pour apprendre tout ce que vous devez savoir sur Python, même si vous êtes nouveau dans la programmationD'EverandApprendre Python rapidement: Le guide du débutant pour apprendre tout ce que vous devez savoir sur Python, même si vous êtes nouveau dans la programmationPas encore d'évaluation
- Hacking pour débutant Le guide ultime du débutant pour apprendre les bases du hacking avec Kali Linux et comment se protéger des hackersD'EverandHacking pour débutant Le guide ultime du débutant pour apprendre les bases du hacking avec Kali Linux et comment se protéger des hackersPas encore d'évaluation
- Secrets du Marketing des Médias Sociaux 2021: Conseils et Stratégies Extrêmement Efficaces votre Facebook (Stimulez votre Engagement et Gagnez des Clients Fidèles)D'EverandSecrets du Marketing des Médias Sociaux 2021: Conseils et Stratégies Extrêmement Efficaces votre Facebook (Stimulez votre Engagement et Gagnez des Clients Fidèles)Évaluation : 4 sur 5 étoiles4/5 (2)
- Python | Programmer pas à pas: Le guide du débutant pour une initiation simple & rapide à la programmationD'EverandPython | Programmer pas à pas: Le guide du débutant pour une initiation simple & rapide à la programmationPas encore d'évaluation
- Dark Python : Apprenez à créer vos outils de hacking.D'EverandDark Python : Apprenez à créer vos outils de hacking.Évaluation : 3 sur 5 étoiles3/5 (1)
- Technologie automobile: Les Grands Articles d'UniversalisD'EverandTechnologie automobile: Les Grands Articles d'UniversalisPas encore d'évaluation
- Revue des incompris revue d'histoire des oubliettes: Le Réveil de l'Horloge de Célestin Louis Maxime Dubuisson aliéniste et poèteD'EverandRevue des incompris revue d'histoire des oubliettes: Le Réveil de l'Horloge de Célestin Louis Maxime Dubuisson aliéniste et poèteÉvaluation : 3 sur 5 étoiles3/5 (3)
- Hacking pour débutants : Le guide complet du débutant pour apprendre les bases du hacking avec Kali LinuxD'EverandHacking pour débutants : Le guide complet du débutant pour apprendre les bases du hacking avec Kali LinuxÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- Dans l'esprit des grand investisseurs: Un voyage à la découverte de la psychologie utilisée par les plus grands investisseurs de tous les temps à travers des analyses opérationnellD'EverandDans l'esprit des grand investisseurs: Un voyage à la découverte de la psychologie utilisée par les plus grands investisseurs de tous les temps à travers des analyses opérationnellÉvaluation : 4.5 sur 5 étoiles4.5/5 (3)
- Kali Linux pour débutant : Le guide ultime du débutant pour apprendre les bases de Kali Linux.D'EverandKali Linux pour débutant : Le guide ultime du débutant pour apprendre les bases de Kali Linux.Évaluation : 5 sur 5 étoiles5/5 (1)
- L'analyse fondamentale facile à apprendre: Le guide d'introduction aux techniques et stratégies d'analyse fondamentale pour anticiper les événements qui font bouger les marchésD'EverandL'analyse fondamentale facile à apprendre: Le guide d'introduction aux techniques et stratégies d'analyse fondamentale pour anticiper les événements qui font bouger les marchésÉvaluation : 3.5 sur 5 étoiles3.5/5 (4)
- L'analyse technique facile à apprendre: Comment construire et interpréter des graphiques d'analyse technique pour améliorer votre activité de trading en ligne.D'EverandL'analyse technique facile à apprendre: Comment construire et interpréter des graphiques d'analyse technique pour améliorer votre activité de trading en ligne.Évaluation : 3.5 sur 5 étoiles3.5/5 (6)
- Guide Pour Les Débutants En Matière De Piratage Informatique: Comment Pirater Un Réseau Sans Fil, Sécurité De Base Et Test De Pénétration, Kali LinuxD'EverandGuide Pour Les Débutants En Matière De Piratage Informatique: Comment Pirater Un Réseau Sans Fil, Sécurité De Base Et Test De Pénétration, Kali LinuxÉvaluation : 1 sur 5 étoiles1/5 (1)
- Wireshark pour les débutants : Le guide ultime du débutant pour apprendre les bases de l’analyse réseau avec Wireshark.D'EverandWireshark pour les débutants : Le guide ultime du débutant pour apprendre les bases de l’analyse réseau avec Wireshark.Pas encore d'évaluation
- Le trading en ligne facile à apprendre: Comment devenir un trader en ligne et apprendre à investir avec succèsD'EverandLe trading en ligne facile à apprendre: Comment devenir un trader en ligne et apprendre à investir avec succèsÉvaluation : 3.5 sur 5 étoiles3.5/5 (19)
- WiFi Hacking : Le guide simplifié du débutant pour apprendre le hacking des réseaux WiFi avec Kali LinuxD'EverandWiFi Hacking : Le guide simplifié du débutant pour apprendre le hacking des réseaux WiFi avec Kali LinuxÉvaluation : 3 sur 5 étoiles3/5 (1)
- Le Guide Rapide Du Cloud Computing Et De La CybersécuritéD'EverandLe Guide Rapide Du Cloud Computing Et De La CybersécuritéPas encore d'évaluation
- Le plan marketing en 4 étapes: Stratégies et étapes clés pour créer des plans de marketing qui fonctionnentD'EverandLe plan marketing en 4 étapes: Stratégies et étapes clés pour créer des plans de marketing qui fonctionnentPas encore d'évaluation
- Le guide pratique du hacker dans les tests d’intrusion IoT : Le livre indispensable pour identifiez les vulnérabilités et sécurisez vos objets intelligentsD'EverandLe guide pratique du hacker dans les tests d’intrusion IoT : Le livre indispensable pour identifiez les vulnérabilités et sécurisez vos objets intelligentsPas encore d'évaluation
- Les Chandeliers Japonaises facile à apprendre: Le guide d'introduction aux voiles japonaises et les stratégies d'analyse technique les plus efficacesD'EverandLes Chandeliers Japonaises facile à apprendre: Le guide d'introduction aux voiles japonaises et les stratégies d'analyse technique les plus efficacesÉvaluation : 4.5 sur 5 étoiles4.5/5 (5)
- La psychologie du trading facile à apprendre: Comment appliquer les stratégies et les attitudes psychologiques des traders gagnants pour réussir dans le trading.D'EverandLa psychologie du trading facile à apprendre: Comment appliquer les stratégies et les attitudes psychologiques des traders gagnants pour réussir dans le trading.Évaluation : 4 sur 5 étoiles4/5 (2)
- Gestion de projet : outils pour la vie quotidienneD'EverandGestion de projet : outils pour la vie quotidienneÉvaluation : 5 sur 5 étoiles5/5 (2)
- Python pour les hackers : Le guide des script kiddies : apprenez à créer vos propres outils de hackingD'EverandPython pour les hackers : Le guide des script kiddies : apprenez à créer vos propres outils de hackingÉvaluation : 5 sur 5 étoiles5/5 (1)
- Piraté: Guide Ultime De Kali Linux Et De Piratage Sans Fil Avec Des Outils De Test De SécuritéD'EverandPiraté: Guide Ultime De Kali Linux Et De Piratage Sans Fil Avec Des Outils De Test De SécuritéPas encore d'évaluation
- Python Offensif : Le guide du débutant pour apprendre les bases du langage Python et créer des outils de hacking.D'EverandPython Offensif : Le guide du débutant pour apprendre les bases du langage Python et créer des outils de hacking.Pas encore d'évaluation