Vous aimerez peut-être aussi
- CCP 2011 MP m2 CorrigeDocument5 pagesCCP 2011 MP m2 CorrigeSara MarouchePas encore d'évaluation
- CR TransfoFourrierDocument19 pagesCR TransfoFourrierJulio TusambaPas encore d'évaluation
- Guide Utilisateur Prestashop 1.7Document312 pagesGuide Utilisateur Prestashop 1.7wxcvPas encore d'évaluation
- 3 Continuité Et DérivabilitéDocument5 pages3 Continuité Et Dérivabilitélvtmath100% (2)
- Check-List Hse BouiraDocument8 pagesCheck-List Hse BouiraManseur AmarPas encore d'évaluation
- Exercice AcpDocument4 pagesExercice AcpRashid Laanaya100% (1)
- Interpolation (Cours Math 4 "Usthb")Document51 pagesInterpolation (Cours Math 4 "Usthb")laperouse2008100% (2)
- Corrigé5Document5 pagesCorrigé5Ibtissam RouichiPas encore d'évaluation
- Examen MLG SP 22 23Document4 pagesExamen MLG SP 22 23Ferdaws ZiadiaPas encore d'évaluation
- Corrige STL Bio Antilles-Guyane Juin2016 FHDocument8 pagesCorrige STL Bio Antilles-Guyane Juin2016 FHToumany FofanaPas encore d'évaluation
- Cosinus SureleveDocument12 pagesCosinus SureleveJalila MahmoudPas encore d'évaluation
- DS 2014 2015Document4 pagesDS 2014 2015FitzPas encore d'évaluation
- Mines MP 2014 M1Document4 pagesMines MP 2014 M1OmaMansouPas encore d'évaluation
- Determinants 2020Document33 pagesDeterminants 2020Yves BeaudouinPas encore d'évaluation
- Ex EndDocument5 pagesEx EndAngus MakPas encore d'évaluation
- DL1812Document2 pagesDL1812marouan8bounaderPas encore d'évaluation
- SOFT AG IIA5 23 24 TD5 Etudiant CorrigéDocument4 pagesSOFT AG IIA5 23 24 TD5 Etudiant CorrigéMalak ChefridPas encore d'évaluation
- Corrige STL Biotechnologies Metropole Juin2014Document6 pagesCorrige STL Biotechnologies Metropole Juin2014unsheatedsword55Pas encore d'évaluation
- TPP6Document17 pagesTPP6louai beznisPas encore d'évaluation
- Projet Analyse NumeriqueDocument3 pagesProjet Analyse NumeriqueAlphonsinePas encore d'évaluation
- Modèles Statistiques Et Intervalles de ConfianceDocument21 pagesModèles Statistiques Et Intervalles de ConfianceKarin RiveraPas encore d'évaluation
- Exam S2 MPC 2018-2019-FinalDocument4 pagesExam S2 MPC 2018-2019-FinalAziz JridiPas encore d'évaluation
- Le modèle sinusoïdal:: = Asin (ωt +ϕ)Document6 pagesLe modèle sinusoïdal:: = Asin (ωt +ϕ)Piero CtPas encore d'évaluation
- Stat1 2Document4 pagesStat1 2yacine.koubaPas encore d'évaluation
- BEN CHEIKH Othman D M1 Electrotechnique IndustrielleDocument2 pagesBEN CHEIKH Othman D M1 Electrotechnique IndustrielleELmokhtar HamrouniPas encore d'évaluation
- Études Statique Et Dynamique Du Ressort: Safa Benelmekadem Safae Ouchen Adam Belabdi Ilyas Elasri Ousssama El AzoukiDocument7 pagesÉtudes Statique Et Dynamique Du Ressort: Safa Benelmekadem Safae Ouchen Adam Belabdi Ilyas Elasri Ousssama El Azoukimmm aaPas encore d'évaluation
- 12 Exercices Avec Solutions en ElectrostatiqueDocument10 pages12 Exercices Avec Solutions en ElectrostatiqueAdnane BelPas encore d'évaluation
- Chap7 876Document39 pagesChap7 876hafekog343Pas encore d'évaluation
- CH2 - Tests Pour Un Seul Echantillon - SlidesDocument83 pagesCH2 - Tests Pour Un Seul Echantillon - SlidesJames OptimistePas encore d'évaluation
- (D) Identification2Document9 pages(D) Identification2Yacine AlajijePas encore d'évaluation
- Fiche 4 Transmission Des Données NumériquesDocument12 pagesFiche 4 Transmission Des Données NumériquesMustapha MesselekPas encore d'évaluation
- Statistique A Deux VariablesDocument5 pagesStatistique A Deux Variablesr00TPas encore d'évaluation
- Cours Prob INSADocument60 pagesCours Prob INSADocPas encore d'évaluation
- Cours GLM SimpleDocument19 pagesCours GLM Simpleothniel GnanPas encore d'évaluation
- Cours Sur Les Séries de FourierDocument5 pagesCours Sur Les Séries de Fourierprs59Pas encore d'évaluation
- Examen9 Structure MachineDocument6 pagesExamen9 Structure MachineAbdel Malek RahaliPas encore d'évaluation
- Calc Matr - TDDocument5 pagesCalc Matr - TDamine2017khalilPas encore d'évaluation
- Compte Rendu TP4 Pendule Elastique PDFDocument5 pagesCompte Rendu TP4 Pendule Elastique PDFOussama hartley100% (1)
- Révision Echantillonnage Estimation TestDocument16 pagesRévision Echantillonnage Estimation TestMustapha ZettifPas encore d'évaluation
- Individus Sains Individus Malades Individus Gu Ris 0,05 0,20Document5 pagesIndividus Sains Individus Malades Individus Gu Ris 0,05 0,20Antoine PacoPas encore d'évaluation
- 4.logarithme Correction-2015 PDFDocument10 pages4.logarithme Correction-2015 PDFmontassarPas encore d'évaluation
- td10 11!!!!!!!!!!!Document20 pagestd10 11!!!!!!!!!!!taikyousseflogfrPas encore d'évaluation
- Chapitre2 Modèle Linéaire MultipleDocument14 pagesChapitre2 Modèle Linéaire Multiplesanae belhajPas encore d'évaluation
- Serie 2Document2 pagesSerie 2Nesrine HajriPas encore d'évaluation
- 2 Moyenne, VarianceDocument6 pages2 Moyenne, VariancelvtmathPas encore d'évaluation
- Travail A Rendre Du StatistiqueDocument11 pagesTravail A Rendre Du StatistiqueLOUBNA EL GOURICHIPas encore d'évaluation
- M02rm3ea 1Document4 pagesM02rm3ea 1ALI ALIPas encore d'évaluation
- SUJET - Mathématiques (MP-MPI-PC-PSI)Document4 pagesSUJET - Mathématiques (MP-MPI-PC-PSI)zinougftnPas encore d'évaluation
- Exercices Sur Les StatistiquesDocument3 pagesExercices Sur Les StatistiquesMuhammad RacimPas encore d'évaluation
- Exoscorr VADocument4 pagesExoscorr VASorelle TakoukamPas encore d'évaluation
- 1 ψ (0, 0; t = 0) = 1 T T n∈Document6 pages1 ψ (0, 0; t = 0) = 1 T T n∈hamza aouaichiaPas encore d'évaluation
- Estimation Chap2Document16 pagesEstimation Chap2Mouhamd ChimouPas encore d'évaluation
- MP MATHS MINES 1 2014.enonceDocument4 pagesMP MATHS MINES 1 2014.enonceLandry YobouePas encore d'évaluation
- Notation ScientifiqueDocument10 pagesNotation Scientifiqueelhafianenabil2024Pas encore d'évaluation
- Cours de Statistiques DescriptivesDocument43 pagesCours de Statistiques DescriptivesDantedebroca DantePas encore d'évaluation
- Maths1 2016 L'XDocument6 pagesMaths1 2016 L'XOmar DebbaghPas encore d'évaluation
- LFSR PDFDocument72 pagesLFSR PDFRaniaPas encore d'évaluation
- Inégalité de TchebychevDocument4 pagesInégalité de TchebychevKarimaPas encore d'évaluation
- Cours de Statistique 2Document25 pagesCours de Statistique 2Jéros Vigan100% (1)
- Tan InterpolationDocument5 pagesTan InterpolationAyman LazrekPas encore d'évaluation
- TD Courbesparametrees CorrectionDocument11 pagesTD Courbesparametrees CorrectionAbdellatif KhafifPas encore d'évaluation
- Matrice de Rotation - WikipédiaDocument13 pagesMatrice de Rotation - Wikipédiamaroukabbej02Pas encore d'évaluation
- Maths TD5Document7 pagesMaths TD5maroukabbej02Pas encore d'évaluation
- Maths TD3Document4 pagesMaths TD3maroukabbej02Pas encore d'évaluation
- Maths TD2Document2 pagesMaths TD2maroukabbej02Pas encore d'évaluation
- Convergence Critere ArretDocument7 pagesConvergence Critere Arretmaroukabbej02Pas encore d'évaluation
- Chapitre 5 Réseaux Mobiles SatellitairesDocument22 pagesChapitre 5 Réseaux Mobiles Satellitairesmohamed amine boukariPas encore d'évaluation
- Manuel GigamediaDocument5 pagesManuel GigamediaLaurent OlivierPas encore d'évaluation
- Chapitre 4 AvanceDocument59 pagesChapitre 4 AvanceTATAPas encore d'évaluation
- Cable Distribution FRDocument1 pageCable Distribution FRyoyorigolo9Pas encore d'évaluation
- Schema Des EtudesDocument1 pageSchema Des EtudesLechelonPas encore d'évaluation
- Contrat Entre Modele Et PhotographeDocument1 pageContrat Entre Modele Et PhotographeKilianPas encore d'évaluation
- Circuits Triphasés ÉquilibrésDocument45 pagesCircuits Triphasés Équilibrésothman azPas encore d'évaluation
- Ia l3 2019 CC SolutionsDocument3 pagesIa l3 2019 CC SolutionsAbdallahi SidiPas encore d'évaluation
- E TRACKER S DPT FRDocument62 pagesE TRACKER S DPT FRGábor NémethPas encore d'évaluation
- Netiquette PédagogiqueDocument2 pagesNetiquette PédagogiqueFrédéric GagnonPas encore d'évaluation
- Cei 60044-2Document9 pagesCei 60044-2Abdelghani BouhouchePas encore d'évaluation
- Votre Reçu de Billet Électronique Courjonodile 25sep2023 Paris MadridDocument2 pagesVotre Reçu de Billet Électronique Courjonodile 25sep2023 Paris Madridodile.courjonPas encore d'évaluation
- Malaxage Beton LCPC Oa41Document211 pagesMalaxage Beton LCPC Oa41dino cedricPas encore d'évaluation
- ExposéDocument14 pagesExposérofeida lamraniPas encore d'évaluation
- TP CCF 3h Programmation Centrale ELA 3000 2010-01Document4 pagesTP CCF 3h Programmation Centrale ELA 3000 2010-01Alain GeoffroyPas encore d'évaluation
- Protocols PDFDocument25 pagesProtocols PDFnya ngassaPas encore d'évaluation
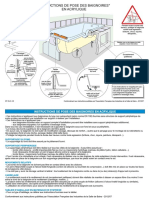
- Instructions de Pose Des Baignoires en AcryliqueDocument2 pagesInstructions de Pose Des Baignoires en Acryliquecloud adsophPas encore d'évaluation
- DEP Mécanique Dengin de Chantier Eleve ÉtrangerDocument3 pagesDEP Mécanique Dengin de Chantier Eleve ÉtrangerMch HamidiPas encore d'évaluation
- Cours RedactionDocument29 pagesCours RedactionBadia MahmoudiPas encore d'évaluation
- Projet TutorielDocument12 pagesProjet TutorielGaetan FondjoPas encore d'évaluation
- Check-List CamionDocument1 pageCheck-List CamionabdouPas encore d'évaluation
- CV Abdelkebir DebbaghDocument1 pageCV Abdelkebir DebbaghAbdelkebir DEBBAGHPas encore d'évaluation
- Cahier Des Charges Logo DjiboutiDocument5 pagesCahier Des Charges Logo DjiboutiPierrick SossahPas encore d'évaluation
- L'Essentiel Automatismes Et Contrôle (PDFDrive)Document290 pagesL'Essentiel Automatismes Et Contrôle (PDFDrive)RénélicPas encore d'évaluation
- Coursinformatique Id3249 PDFDocument19 pagesCoursinformatique Id3249 PDFBelmeche IsmahanePas encore d'évaluation
- Exercices Algebre Relationnelle+SQL-V2Document2 pagesExercices Algebre Relationnelle+SQL-V2Yassin HawariPas encore d'évaluation
- Etude Des PompesDocument8 pagesEtude Des Pompessaif amriPas encore d'évaluation
- Vade-Mecum de Kinésithérapie Et de Rééducation Fonctionnelle Télécharger, Lire PDFDocument6 pagesVade-Mecum de Kinésithérapie Et de Rééducation Fonctionnelle Télécharger, Lire PDFAchraf RabadiPas encore d'évaluation