Vous aimerez peut-être aussi
- Groupes ApplicationsDocument55 pagesGroupes ApplicationsSaly KaPas encore d'évaluation
- SpheriquesDocument59 pagesSpheriquesStaff Health ICRC AmePas encore d'évaluation
- Topologie - WikipédiaDocument4 pagesTopologie - WikipédiajeanpcochetPas encore d'évaluation
- GeoAgreg 2017 CoursDocument117 pagesGeoAgreg 2017 Coursilyasff2006Pas encore d'évaluation
- A. Généralités.: Equations DifférentiellesDocument58 pagesA. Généralités.: Equations DifférentiellesMarc TentiPas encore d'évaluation
- Transformation Coordonnees PDFDocument46 pagesTransformation Coordonnees PDFBassem BhiriPas encore d'évaluation
- polyUE8 PDFDocument30 pagespolyUE8 PDFLotfi AllalPas encore d'évaluation
- Decompositions en OndelettesDocument24 pagesDecompositions en OndeletteshorsmiPas encore d'évaluation
- ViewDocument20 pagesViewbouhrara faroukPas encore d'évaluation
- Theorie Ensemble1Document20 pagesTheorie Ensemble1طارق المالكيPas encore d'évaluation
- GALM2Document73 pagesGALM2Raphael BihayPas encore d'évaluation
- Forcing Et Semantique de Kripke-JoyalDocument34 pagesForcing Et Semantique de Kripke-JoyalbouyaPas encore d'évaluation
- DPaffineDocument26 pagesDPaffinemdrouguiPas encore d'évaluation
- TSF Kahane2Document8 pagesTSF Kahane2Xander HrPas encore d'évaluation
- David Hilbert: Les Grands Articles d'UniversalisD'EverandDavid Hilbert: Les Grands Articles d'UniversalisPas encore d'évaluation
- Grothendieck - Un Héritage Mathématique Fertile - Pour La ScienceDocument15 pagesGrothendieck - Un Héritage Mathématique Fertile - Pour La Scienceclydebarrow92Pas encore d'évaluation
- Géométrie Et Théorie Des Groupes Les Groupes Hyperboliques de Gromov (Michel Coornaert, Thomas Delzant Etc.) @le ChatDocument175 pagesGéométrie Et Théorie Des Groupes Les Groupes Hyperboliques de Gromov (Michel Coornaert, Thomas Delzant Etc.) @le Chatjeanmarcnicolas45Pas encore d'évaluation
- Chilov G. - Analyse Mathematique. Fonctions D'une Variable. Tome 2, 3me Partie - Mir (1978)Document306 pagesChilov G. - Analyse Mathematique. Fonctions D'une Variable. Tome 2, 3me Partie - Mir (1978)Hicham YangPas encore d'évaluation
- Aogs MSHDocument40 pagesAogs MSHAntone CalotPas encore d'évaluation
- L3M1 Cohomologie Des Groupes Topologiques Et Des Algèbres de Lie by Alain GuichardetDocument422 pagesL3M1 Cohomologie Des Groupes Topologiques Et Des Algèbres de Lie by Alain GuichardetNicolas Hounto Hotegbe0% (1)
- Topologie ULgDocument95 pagesTopologie ULgFati KONFEPas encore d'évaluation
- Evide On FR Corrado MalangaDocument70 pagesEvide On FR Corrado MalangaOmniColorePas encore d'évaluation
- Notions de Logique Mathematique - Tim Van Der LindenDocument63 pagesNotions de Logique Mathematique - Tim Van Der LindenBPas encore d'évaluation
- Afst 1911 3 3 209 0Document169 pagesAfst 1911 3 3 209 0Rémy BELTRAPas encore d'évaluation
- CoursDocument104 pagesCoursbadro88Pas encore d'évaluation
- Equations DifférentiellesDocument62 pagesEquations DifférentiellesaverroesPas encore d'évaluation
- Krivine J.-L. - Théorie Des Ensembles - 1998Document282 pagesKrivine J.-L. - Théorie Des Ensembles - 1998kunzjacqPas encore d'évaluation
- 2 NdordreDocument36 pages2 NdordreFred MesnardPas encore d'évaluation
- MSH 4272Document24 pagesMSH 4272de ChaumarayPas encore d'évaluation
- Naissance Des Feuilletages, D'ehresmann-Reeb A NovikovDocument16 pagesNaissance Des Feuilletages, D'ehresmann-Reeb A NovikovcalamartPas encore d'évaluation
- Théorème de Stokes - WikipédiaDocument7 pagesThéorème de Stokes - WikipédiaEmmanuel BELGOSPas encore d'évaluation
- JMSouriau ThermoGeo1978Document21 pagesJMSouriau ThermoGeo1978Youssoupha NdoyePas encore d'évaluation
- Expose Sur L'application Des MathDocument12 pagesExpose Sur L'application Des MathonealPas encore d'évaluation
- CHAPITRE 1 La Physique en TSDocument54 pagesCHAPITRE 1 La Physique en TSmalickcoumibaly68Pas encore d'évaluation
- Cours de Cinématique - L1Document37 pagesCours de Cinématique - L1Guy Ygal100% (1)
- Aihp 1938 8 3 111 0Document40 pagesAihp 1938 8 3 111 0Oussama Faratas LainePas encore d'évaluation
- Théorie Du Champ D UniteDocument25 pagesThéorie Du Champ D UniteLaugierPas encore d'évaluation
- Geometrie ProjectiveDocument41 pagesGeometrie ProjectiveherringtsuPas encore d'évaluation
- SPHM-Dieudonne-La Domination Universelle de La GéométrieDocument8 pagesSPHM-Dieudonne-La Domination Universelle de La GéométrieAriel BorgesPas encore d'évaluation
- Buser P. - Géométrie RiemannienneDocument60 pagesBuser P. - Géométrie Riemanniennewsdm100% (1)
- Anshrly 00992384 AJDocument91 pagesAnshrly 00992384 AJSlaven007Pas encore d'évaluation
- Analyse Complexe: Modifier Modifier Le CodeDocument3 pagesAnalyse Complexe: Modifier Modifier Le CodeKarl ZinsouPas encore d'évaluation
- Syllabus GPDocument252 pagesSyllabus GPmuledidaniel8Pas encore d'évaluation
- Serre1991 AsterisqueDocument18 pagesSerre1991 AsterisqueBoutet de Monvel JacquesPas encore d'évaluation
- Kirillov, Gvichiani - Théorèmes Et Problèmes D'analyse Fonctionnelle - Mir - 1982Document323 pagesKirillov, Gvichiani - Théorèmes Et Problèmes D'analyse Fonctionnelle - Mir - 1982Hicham Yang100% (2)
- Groupes Et Algebres de LieDocument44 pagesGroupes Et Algebres de LieTayeb TitoubPas encore d'évaluation
- Poincare Et Son DisqueDocument34 pagesPoincare Et Son DisqueOlivier TORLAIPas encore d'évaluation
- Lobachevsky Etudes Geometriques Sur La Theorie Des ParallelesDocument48 pagesLobachevsky Etudes Geometriques Sur La Theorie Des ParalleleszikibrunoPas encore d'évaluation
- Géométrie Différentielle - WikipédiaDocument5 pagesGéométrie Différentielle - Wikipédianicobar14Pas encore d'évaluation
- TSG2012Document22 pagesTSG2012imane ElarouiPas encore d'évaluation
- Fondements Des Mathématiques PDFDocument21 pagesFondements Des Mathématiques PDFwesh007Pas encore d'évaluation
- IntroductionDocument11 pagesIntroductionaliboy25Pas encore d'évaluation
- UnifDocument25 pagesUniflaumaillervanessaPas encore d'évaluation
- 2 LimiteDocument79 pages2 LimiteMamadouPas encore d'évaluation
- StableDocument5 pagesStableJean HurtePas encore d'évaluation
- Analyse MathématiqueDocument32 pagesAnalyse Mathématiqueahmado35641Pas encore d'évaluation
- Godement - Topologie Algebrique Et Theorie Des FaisceauxDocument289 pagesGodement - Topologie Algebrique Et Theorie Des FaisceauxBoutet de Monvel JacquesPas encore d'évaluation
- 4M024-TD01 Groupes Et Algebres de Lie Exercices TD 1 M1 MathematiquesDocument2 pages4M024-TD01 Groupes Et Algebres de Lie Exercices TD 1 M1 MathematiquesbradenlyPas encore d'évaluation
- Propriétés de la parabole Lindsay-Rosie: suivi de Western pour deux AméricainesD'EverandPropriétés de la parabole Lindsay-Rosie: suivi de Western pour deux AméricainesPas encore d'évaluation
- EDT-M2 MASS POP-2223 - AutomneDocument8 pagesEDT-M2 MASS POP-2223 - AutomneQu CPas encore d'évaluation
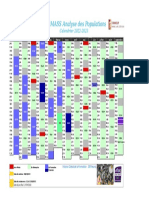
- Calendrier M2masspop 2223 220228Document1 pageCalendrier M2masspop 2223 220228Qu CPas encore d'évaluation
- Parler Breton Comme Un Breton (PDFDrive)Document139 pagesParler Breton Comme Un Breton (PDFDrive)Qu CPas encore d'évaluation
- QGIS Seance 1Document20 pagesQGIS Seance 1Qu CPas encore d'évaluation
- Mazurka 4soeursDocument1 pageMazurka 4soeursQu CPas encore d'évaluation
- QGIS ExercicesDocument5 pagesQGIS ExercicesQu CPas encore d'évaluation
- GLM Poly Logistique Web PDFDocument140 pagesGLM Poly Logistique Web PDFBerrouynePas encore d'évaluation
- Brochure M2 MASS POPDocument22 pagesBrochure M2 MASS POPQu CPas encore d'évaluation
- 6-Pratique Regression LogistiqueDocument274 pages6-Pratique Regression LogistiqueSoleil SucréPas encore d'évaluation
- Apprentissage: Régression LogistiqueDocument3 pagesApprentissage: Régression LogistiqueQu CPas encore d'évaluation
- Cours GalerneDocument38 pagesCours GalerneQu CPas encore d'évaluation
- Introduction Aux Modèles GraphiquesDocument8 pagesIntroduction Aux Modèles GraphiquesQu CPas encore d'évaluation
- Calcul Des LongrinesDocument4 pagesCalcul Des Longrinesmadjid tighiltPas encore d'évaluation
- Thermo 3Document4 pagesThermo 3lilian01.larochePas encore d'évaluation
- Cours Automate Scheinder TSX2-2-2Document12 pagesCours Automate Scheinder TSX2-2-2Eliance GrahoPas encore d'évaluation
- TD ELECTROSTATIQUE Serie 2 2022 - 2023Document2 pagesTD ELECTROSTATIQUE Serie 2 2022 - 2023miguelrikoudomedjoPas encore d'évaluation
- Méthode Des Différences Finies Pour Les EDP Évolution PDFDocument11 pagesMéthode Des Différences Finies Pour Les EDP Évolution PDFAzize Razam100% (1)
- S6 Chapitre 4 Energie ChimiqueDocument16 pagesS6 Chapitre 4 Energie ChimiqueMed Raslene AlouiPas encore d'évaluation
- JANAF Termochemical TablesDocument96 pagesJANAF Termochemical TablesAlan Quintanar HaroPas encore d'évaluation
- Rapport de Travaux Pratiques de Mécanique Des Sols - Groupe 1 - Sous Groupe 1 PDFDocument34 pagesRapport de Travaux Pratiques de Mécanique Des Sols - Groupe 1 - Sous Groupe 1 PDFOumarPas encore d'évaluation
- Aprue 10Document8 pagesAprue 10Ariel Angelo ElegbedePas encore d'évaluation
- TP 4 Matlab-SimulinkDocument6 pagesTP 4 Matlab-SimulinkBelhamidi Mohammed HoussamePas encore d'évaluation
- CI 2020 CorrigéDocument2 pagesCI 2020 Corrigéعبدالرحمان معامريةPas encore d'évaluation
- AA4-Critères de Convergence Des Séries À Termes PositifsDocument42 pagesAA4-Critères de Convergence Des Séries À Termes Positifseya nasfiPas encore d'évaluation
- Sommaire Codap 2010x Rev 03-11 X Rev10-12Document47 pagesSommaire Codap 2010x Rev 03-11 X Rev10-12Our SalahEddinePas encore d'évaluation
- Exercices Moteur AsynchroneDocument8 pagesExercices Moteur AsynchroneyourparadisPas encore d'évaluation
- PanelsDocument7 pagesPanelsalioua aliPas encore d'évaluation
- Théorème de Banach-SteinhausDocument3 pagesThéorème de Banach-Steinhausاميرة النومPas encore d'évaluation
- La Lumière Illus-CouleursDocument52 pagesLa Lumière Illus-Couleurszemarcelo8Pas encore d'évaluation
- Milieux PoreuxDocument12 pagesMilieux PoreuxMed JimiPas encore d'évaluation
- TriphaséserieDocument7 pagesTriphaséserieanas_hanouna100% (1)
- EMD S1 CM 2023 M2 CM (Récupération Automatique)Document3 pagesEMD S1 CM 2023 M2 CM (Récupération Automatique)nawel mezighechePas encore d'évaluation
- Tour R+9Document134 pagesTour R+9RÊDÄ ÜhPas encore d'évaluation
- Cours RDM - MS1 - Partie 1Document53 pagesCours RDM - MS1 - Partie 1gcd19Pas encore d'évaluation
- Nouveau Document Microsoft WordDocument10 pagesNouveau Document Microsoft WordxlxlxlxlPas encore d'évaluation
- Atf 45-3Document15 pagesAtf 45-3ragkaraPas encore d'évaluation
- Publier Un StatutDocument5 pagesPublier Un StatutAbdourahmane FayePas encore d'évaluation
- LE MURMURE DU SERPENT ANCIEN - 26 Mots de Force. Pratiques Secrétés de Sorc PDFDocument14 pagesLE MURMURE DU SERPENT ANCIEN - 26 Mots de Force. Pratiques Secrétés de Sorc PDFBAGAYOKO75% (4)
- Rapport FinaleDocument162 pagesRapport FinaleArij Naily Ep HammamiPas encore d'évaluation
- Traitement de L'air Et Climatisation. Généralités. (O)Document17 pagesTraitement de L'air Et Climatisation. Généralités. (O)BozoPas encore d'évaluation
- Isometrie Exo CorDocument2 pagesIsometrie Exo CorCédric SorghoPas encore d'évaluation