Vous aimerez peut-être aussi
- Annales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésD'EverandAnnales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- Algèbre linéaire: Les Grands Articles d'UniversalisD'EverandAlgèbre linéaire: Les Grands Articles d'UniversalisPas encore d'évaluation
- GISEMENTDocument4 pagesGISEMENTTouré AbdoulPas encore d'évaluation
- Geometrie Pour Dao2 PDFDocument161 pagesGeometrie Pour Dao2 PDFlekouf43100% (1)
- Applications MatricesDocument37 pagesApplications MatricesNeoXana01Pas encore d'évaluation
- TP Conduction CompletDocument10 pagesTP Conduction Complethamza layachi75% (4)
- Api RestDocument8 pagesApi RestfogoPas encore d'évaluation
- Leçons sur les séries trigonométriques : professées au Collège de FranceD'EverandLeçons sur les séries trigonométriques : professées au Collège de FrancePas encore d'évaluation
- Chapitre 1 - Eléments de Physique NucléaireDocument69 pagesChapitre 1 - Eléments de Physique NucléaireMohamed El Hadi Redjaimia100% (1)
- TF06 P09 MedianDocument4 pagesTF06 P09 MedianAyt Moha BrahimPas encore d'évaluation
- Rapport de L'exposé de CF1Document8 pagesRapport de L'exposé de CF1HAIBA ESSAOUAKIAPas encore d'évaluation
- Cours de Geometrie AffineDocument16 pagesCours de Geometrie AffineMawuko MatyPas encore d'évaluation
- AL3 CC1 2223 CorrDocument3 pagesAL3 CC1 2223 Corrzain zagoraPas encore d'évaluation
- Cours - Automorphismes Orthogonaux Et Matrices OrthogonalesDocument9 pagesCours - Automorphismes Orthogonaux Et Matrices OrthogonalesamenzouPas encore d'évaluation
- Resume Geometrie AffineDocument8 pagesResume Geometrie Affine1234t0411Pas encore d'évaluation
- Chap 3Document19 pagesChap 3Kouamé Illan KonanPas encore d'évaluation
- Alg' Ebre Lin Eaire Exercices: Universit e de ToulonDocument48 pagesAlg' Ebre Lin Eaire Exercices: Universit e de ToulonMohamed aminePas encore d'évaluation
- Algèbre 2 Résumé N°04Document10 pagesAlgèbre 2 Résumé N°04khalid camaroPas encore d'évaluation
- 1 Applications LinéairesDocument64 pages1 Applications LinéairesZelake WilfriedPas encore d'évaluation
- Resume 2Document10 pagesResume 2PhanaPas encore d'évaluation
- Espaces AffinesDocument4 pagesEspaces AffinesKhmer ChamPas encore d'évaluation
- PCSI5 Complement4Document10 pagesPCSI5 Complement4Bakrim OumaimaPas encore d'évaluation
- EDO-2003 - Analyse Numerique (Lecture Notes)Document73 pagesEDO-2003 - Analyse Numerique (Lecture Notes)isaacneumannPas encore d'évaluation
- Espace AffineDocument6 pagesEspace Affinesamuellamboni918Pas encore d'évaluation
- Cours - Automorphismes Orthogonaux Et Matrices Orthogonales 29Document9 pagesCours - Automorphismes Orthogonaux Et Matrices Orthogonales 29SCRIBD CONTACT100% (1)
- EuclDocument7 pagesEuclMuhammed TǎiëbPas encore d'évaluation
- Chapitre 2Document86 pagesChapitre 2Anouar MddPas encore d'évaluation
- TD MTH108Document2 pagesTD MTH108edoholivier111Pas encore d'évaluation
- Cours 30 - Automorphis1mes Orthogonaux Et Matrices OrthogonalesDocument9 pagesCours 30 - Automorphis1mes Orthogonaux Et Matrices OrthogonalesZakariaElkatibPas encore d'évaluation
- M PT Esp JMF 03 PDFDocument3 pagesM PT Esp JMF 03 PDFhanane mariaPas encore d'évaluation
- Integration SegmentDocument16 pagesIntegration SegmentMed RhaiouzPas encore d'évaluation
- ALLOGO1Document12 pagesALLOGO1AllogogermainPas encore d'évaluation
- PrepisometrieDocument3 pagesPrepisometrieNobel MponguiPas encore d'évaluation
- Applications LinéairesDocument7 pagesApplications LinéairesHoucinePas encore d'évaluation
- Euclidien Hermitien - 2021 22Document5 pagesEuclidien Hermitien - 2021 22Walter RafaPas encore d'évaluation
- Fiche Ensemble - Application PDFDocument4 pagesFiche Ensemble - Application PDFSaliPas encore d'évaluation
- Khol 14Document2 pagesKhol 14Max tekouPas encore d'évaluation
- CoursDocument54 pagesCourssino spago100% (1)
- 132 PDFDocument5 pages132 PDFFranklin TchindaPas encore d'évaluation
- Chapitre 2 QRDocument22 pagesChapitre 2 QRrhzakariyaePas encore d'évaluation
- MP MATHS X 1 2017.enonceDocument5 pagesMP MATHS X 1 2017.enonceAhmed KallelPas encore d'évaluation
- tdmth222 Topo1617Document3 pagestdmth222 Topo1617Felix AFEKUPas encore d'évaluation
- Raisonnement EnsemblesDocument15 pagesRaisonnement EnsemblesSimo KardoudiPas encore d'évaluation
- Chapitre II Analyse Fonctionnelle Avec Démonstrations Et Solutions Des ExercicesDocument13 pagesChapitre II Analyse Fonctionnelle Avec Démonstrations Et Solutions Des ExercicesasmatopologiePas encore d'évaluation
- Cours7bis SMPEDocument10 pagesCours7bis SMPEJohan Steve Njossu NjossuPas encore d'évaluation
- Elements D'Algebre Commutative: Ma Itrise de Math Ematiques Universit e D'angers 2003/04 D. SchaubDocument14 pagesElements D'Algebre Commutative: Ma Itrise de Math Ematiques Universit e D'angers 2003/04 D. SchaubNantenainaTojoRakotondrafaraPas encore d'évaluation
- Chap 1Document13 pagesChap 1routaboulePas encore d'évaluation
- TD3, Applications Lineaires 2020, SMA, BOUADocument3 pagesTD3, Applications Lineaires 2020, SMA, BOUAlol testPas encore d'évaluation
- MP MATHS MINES 1 2017.enonceDocument4 pagesMP MATHS MINES 1 2017.enonceWalid El BaharPas encore d'évaluation
- td4MHT413 PDFDocument2 pagestd4MHT413 PDFDIAMIL100% (1)
- Bousquet P. Cours de Géométrie Affine Et Euclidienne Pour L'agrégationDocument82 pagesBousquet P. Cours de Géométrie Affine Et Euclidienne Pour L'agrégationMario PuppiPas encore d'évaluation
- I Some TriesDocument16 pagesI Some TriesOdile ChichignoudPas encore d'évaluation
- Feuille 2Document4 pagesFeuille 2Hugo paléoPas encore d'évaluation
- Chap4 Applications Lineaires SansligneDocument17 pagesChap4 Applications Lineaires SansligneWang-jaPas encore d'évaluation
- Topologie Chap2Document15 pagesTopologie Chap2victoiremayenge940Pas encore d'évaluation
- Algebre OrthogDocument5 pagesAlgebre OrthogEld AyoubPas encore d'évaluation
- Ds 1Document3 pagesDs 1Aymen HAJIFIPas encore d'évaluation
- Chapitre 4 - Applications Lineaires v1Document24 pagesChapitre 4 - Applications Lineaires v1Charle StonksPas encore d'évaluation
- Application Linéaire en PDFDocument2 pagesApplication Linéaire en PDFkhedrimahaPas encore d'évaluation
- Chap2 AlgèbreDocument4 pagesChap2 AlgèbrestreamPas encore d'évaluation
- Théorie Des Graphes Et CombinatoiresDocument67 pagesThéorie Des Graphes Et CombinatoiresTarek BouazzaPas encore d'évaluation
- Xch3 LongmhemmDocument22 pagesXch3 LongmhemmneddoPas encore d'évaluation
- Les Applications 1SMATHS BIOFDocument2 pagesLes Applications 1SMATHS BIOFMohamed LhachimiPas encore d'évaluation
- Serie3 11Document2 pagesSerie3 11Felix AFEKUPas encore d'évaluation
- Cours - Isometries Vectorielles Et Matrices OrthogonalesDocument8 pagesCours - Isometries Vectorielles Et Matrices OrthogonalesL'atelier de licornePas encore d'évaluation
- Exo1 26Document7 pagesExo1 26Imane FarrassPas encore d'évaluation
- DS SDM S1 2015 CorrectionDocument2 pagesDS SDM S1 2015 CorrectiondsiscnPas encore d'évaluation
- PdM3 Guide Corrige Vrac Repros C4Document2 pagesPdM3 Guide Corrige Vrac Repros C4Eva BteichPas encore d'évaluation
- Incendie: I-Prévention Et ProtectionDocument4 pagesIncendie: I-Prévention Et Protectionraid bazizPas encore d'évaluation
- Mémoire de Master-YF-Post Soutenance-20200610Document70 pagesMémoire de Master-YF-Post Soutenance-20200610Yacinthe FAYE100% (1)
- Corrige TD 8 1920 2Document5 pagesCorrige TD 8 1920 2friends diaryPas encore d'évaluation
- FeuilletageDocument25 pagesFeuilletageLē JøkērPas encore d'évaluation
- Poly JavaDocument176 pagesPoly JavaLeonzoConstantiniPas encore d'évaluation
- Serco FDocument26 pagesSerco FRV PenrroiPas encore d'évaluation
- Howto L3 IntervlanroutingDocument7 pagesHowto L3 IntervlanroutingWilford ToussaintPas encore d'évaluation
- CC 1 Analyse Natalia Borbón TorresDocument3 pagesCC 1 Analyse Natalia Borbón TorresNatalia Borbon TorresPas encore d'évaluation
- Ajust ExpoDocument4 pagesAjust ExpoMme_Sos100% (1)
- TD Regime de Neutre TTDocument4 pagesTD Regime de Neutre TTOlivier FLOHRPas encore d'évaluation
- Cours Lignes de Transmission Séance Adaptation D'impédance 2011 2012Document8 pagesCours Lignes de Transmission Séance Adaptation D'impédance 2011 2012benlamlihPas encore d'évaluation
- Examen de Fin de Formation 2008 Tsri Pratique Variante 9Document5 pagesExamen de Fin de Formation 2008 Tsri Pratique Variante 9FatimaLEPas encore d'évaluation
- TD6 PhysiqueDocument4 pagesTD6 PhysiqueEric DeumoPas encore d'évaluation
- Maths X PSI 1998 (Enoncé)Document7 pagesMaths X PSI 1998 (Enoncé)LM --Pas encore d'évaluation
- UE Cybersécurité-Initiation Metasploit v0.3Document17 pagesUE Cybersécurité-Initiation Metasploit v0.3didierPas encore d'évaluation
- NF EN 1431 (Mai 2009)Document19 pagesNF EN 1431 (Mai 2009)Fatima BouhajaPas encore d'évaluation
- Cahier de Charge Du ProjetDocument4 pagesCahier de Charge Du ProjetMehdi KhaledPas encore d'évaluation
- Transferts en PoreuxDocument644 pagesTransferts en PoreuxYacine KaPas encore d'évaluation
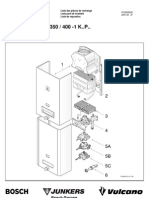
- W - 250 - 275 - 325 - 350 - 400 - 1 K..p..Document28 pagesW - 250 - 275 - 325 - 350 - 400 - 1 K..p..joviadoPas encore d'évaluation
- TP 1Document1 pageTP 1djennati100% (1)
- Unite 71 Manuel OpératoireDocument110 pagesUnite 71 Manuel OpératoireAbdessalem Bougoffa50% (2)
- ANNONCES ASSISTANTS MATERNELS-Disponibilités Secteur Lyautey Du 12 Juin 2020Document3 pagesANNONCES ASSISTANTS MATERNELS-Disponibilités Secteur Lyautey Du 12 Juin 2020younes amaraPas encore d'évaluation