
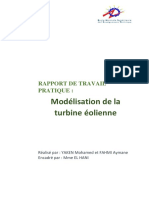
4.2.2 Modèle A Deux Masses
4.2.2 Modèle A Deux Masses
Vous aimerez peut-être aussi
- Sne TP5Document12 pagesSne TP5Matheus Oliveira de FreitasPas encore d'évaluation
- B 7401 g211 Dossier QuestionsDocument10 pagesB 7401 g211 Dossier Questionsmihai_1957Pas encore d'évaluation
- Cours Operations Aerienes Me 06 2023Document194 pagesCours Operations Aerienes Me 06 2023TinePas encore d'évaluation
- Résumé ÉnergieDocument7 pagesRésumé Énergiemimita mahboulista100% (1)
- Serie1 Aerodynamique 2019 2020Document2 pagesSerie1 Aerodynamique 2019 2020Oussama Ridene0% (1)
- Turbomachine ExposéDocument4 pagesTurbomachine ExposéNouha AbdessamedPas encore d'évaluation
- 2011 Dimensionnement Support Antenne F1AHO PDFDocument11 pages2011 Dimensionnement Support Antenne F1AHO PDFhamcha1969Pas encore d'évaluation
- EOLIENNEDocument4 pagesEOLIENNEHamouchePas encore d'évaluation
- DM EnrDocument12 pagesDM EnrRaouf BenabdesselamPas encore d'évaluation
- MicrosimounDocument7 pagesMicrosimounBouallegue MounirPas encore d'évaluation
- 4.2 Estimation Du Couple Aérodynamique 4.2.1 Estimation Par Filtrage de KalmanDocument2 pages4.2 Estimation Du Couple Aérodynamique 4.2.1 Estimation Par Filtrage de KalmanMendil likiaPas encore d'évaluation
- Chapitre 4 Modélisation Et Simulation Du Système Mécanique de L'éolienDocument11 pagesChapitre 4 Modélisation Et Simulation Du Système Mécanique de L'éolienSalmi Nour E'ddinePas encore d'évaluation
- Les SupportsDocument14 pagesLes SupportsAsser EmmanuellaPas encore d'évaluation
- Introduction GeneraleDocument54 pagesIntroduction Generaleامين البحري꧁Pas encore d'évaluation
- DYN-Dynamique Du Véhicule ÉlectriqueDocument4 pagesDYN-Dynamique Du Véhicule ÉlectriquePutin PutoutPas encore d'évaluation
- Aeroport3 1Document39 pagesAeroport3 1yassineePas encore d'évaluation
- Chap03 PDFDocument129 pagesChap03 PDFnebilePas encore d'évaluation
- Aérage Dans Les MinesDocument2 pagesAérage Dans Les Minesyoussef elmoudenPas encore d'évaluation
- Bac S 2013 Sciences IngenieurDocument11 pagesBac S 2013 Sciences IngenieurLETUDIANTPas encore d'évaluation
- Construction AbaqueDocument16 pagesConstruction AbaqueadsrjmPas encore d'évaluation
- Expose TurbomachineDocument11 pagesExpose TurbomachineKamel Lafala0% (1)
- Dual Inlet Ducted Ramjet CombustorDocument11 pagesDual Inlet Ducted Ramjet CombustorCliff ThrivePas encore d'évaluation
- Les Techniques DétalonnageDocument9 pagesLes Techniques DétalonnageScribdTranslationsPas encore d'évaluation
- Art10!2!10 Dimensionnement Pales Meth ElePale 4Document16 pagesArt10!2!10 Dimensionnement Pales Meth ElePale 4James SmithPas encore d'évaluation
- Caracteristiques AerodynamiquesDocument20 pagesCaracteristiques AerodynamiquesMechmedPas encore d'évaluation
- Simulation Numérique de L'écoulement Autour D'une Éolienne À Axe HorizontalDocument13 pagesSimulation Numérique de L'écoulement Autour D'une Éolienne À Axe HorizontalSel MaPas encore d'évaluation
- TP 3Document13 pagesTP 3Chemseddine kardiPas encore d'évaluation
- MAximisation de La Production de L'énergie ÉolienneDocument6 pagesMAximisation de La Production de L'énergie ÉolienneBibliothèque Al-itkanPas encore d'évaluation
- Les SupportsDocument7 pagesLes SupportsKossai GribPas encore d'évaluation
- 2-Air Comprime 4pDocument4 pages2-Air Comprime 4pAbdelali Choufani100% (1)
- Commande Automatique Dune Eolienne Mars 2023 (Rectified)Document5 pagesCommande Automatique Dune Eolienne Mars 2023 (Rectified)Aym HafPas encore d'évaluation
- TurbinesNN 2 PDFDocument8 pagesTurbinesNN 2 PDFBboubrahim BbnnPas encore d'évaluation
- L'AnémomètreDocument25 pagesL'Anémomètreben massoud RamzyPas encore d'évaluation
- C3F1014Document4 pagesC3F1014woomacPas encore d'évaluation
- TP EolienneDocument8 pagesTP EolienneYahye GuirrehPas encore d'évaluation
- CH 1Document48 pagesCH 1Bilel Ben Amira86% (7)
- Rapport TP ÉolieneDocument14 pagesRapport TP ÉolieneYoussef Amhine100% (6)
- Maximisation de La Puissance ÉolienneDocument3 pagesMaximisation de La Puissance ÉolienneHamouchePas encore d'évaluation
- 4368 Dossier Questions Epreuve E4 Bts Ava 2012 2Document10 pages4368 Dossier Questions Epreuve E4 Bts Ava 2012 2Gabriel ArnalPas encore d'évaluation
- Les Calculs Et Résultats (Avec FLUENT)Document5 pagesLes Calculs Et Résultats (Avec FLUENT)El Pacha SalemPas encore d'évaluation
- Contrôle 4 - 2023Document4 pagesContrôle 4 - 2023Bilal LaakelPas encore d'évaluation
- Partie IIDocument6 pagesPartie IIi.baddouPas encore d'évaluation
- Mah 4973Document118 pagesMah 4973hassen baccarPas encore d'évaluation
- PC GENE SUJET 040 Exo2 Phy CyclismeDocument4 pagesPC GENE SUJET 040 Exo2 Phy CyclismeElias AthanassiadisPas encore d'évaluation
- Article en FrançaisDocument42 pagesArticle en FrançaisOussama MaarirPas encore d'évaluation
- f779x1 2015Document37 pagesf779x1 2015latyrniangPas encore d'évaluation
- SujetDocument4 pagesSujetL'aigle ImposantPas encore d'évaluation
- Fabrica de EmbraguesDocument40 pagesFabrica de EmbraguesJohn Alexander Ramos VargasPas encore d'évaluation
- Probleme de La Motorisation Dun VehiculeDocument22 pagesProbleme de La Motorisation Dun Vehiculeexpert.caleb7Pas encore d'évaluation
- Etude Dun Actionneur Electroactif Pour Deformation de Surface Portante Pour Optimiser LaDocument14 pagesEtude Dun Actionneur Electroactif Pour Deformation de Surface Portante Pour Optimiser LaYoussef NajihPas encore d'évaluation
- Simulation Des Performances Aerodynamiques D'Une Eolienne A Axe HorizontalDocument3 pagesSimulation Des Performances Aerodynamiques D'Une Eolienne A Axe HorizontalMohammed LachhabPas encore d'évaluation
- 03-2023 BS F Banc de Puissance Bases PhysiquesDocument2 pages03-2023 BS F Banc de Puissance Bases PhysiquesOlivier IschiPas encore d'évaluation
- Corrélation Entre Paramètres de Forage Et Profils Pressiométriques Par Autoforage Du Tubage RotostafDocument8 pagesCorrélation Entre Paramètres de Forage Et Profils Pressiométriques Par Autoforage Du Tubage Rotostaftouhami benzakourPas encore d'évaluation
- Cours 6 Eolien 2017Document4 pagesCours 6 Eolien 2017abd elhamid mabroukPas encore d'évaluation
- Projet EolienneDocument9 pagesProjet EolienneAmal ElPas encore d'évaluation
- Asservissement en Attitude D'un DroneDocument10 pagesAsservissement en Attitude D'un DroneYolo BringPas encore d'évaluation
- Chapitre 2 Distribution Du Vent PDFDocument12 pagesChapitre 2 Distribution Du Vent PDFZino MohPas encore d'évaluation
- Filtre adaptatif: Améliorer la vision par ordinateur grâce au filtrage adaptatifD'EverandFiltre adaptatif: Améliorer la vision par ordinateur grâce au filtrage adaptatifPas encore d'évaluation



























































Vous aimerez peut-être aussi
- Sne TP5Document12 pagesSne TP5Matheus Oliveira de FreitasPas encore d'évaluation
- B 7401 g211 Dossier QuestionsDocument10 pagesB 7401 g211 Dossier Questionsmihai_1957Pas encore d'évaluation
- Cours Operations Aerienes Me 06 2023Document194 pagesCours Operations Aerienes Me 06 2023TinePas encore d'évaluation
- Résumé ÉnergieDocument7 pagesRésumé Énergiemimita mahboulista100% (1)
- Serie1 Aerodynamique 2019 2020Document2 pagesSerie1 Aerodynamique 2019 2020Oussama Ridene0% (1)
- Turbomachine ExposéDocument4 pagesTurbomachine ExposéNouha AbdessamedPas encore d'évaluation
- 2011 Dimensionnement Support Antenne F1AHO PDFDocument11 pages2011 Dimensionnement Support Antenne F1AHO PDFhamcha1969Pas encore d'évaluation
- EOLIENNEDocument4 pagesEOLIENNEHamouchePas encore d'évaluation
- DM EnrDocument12 pagesDM EnrRaouf BenabdesselamPas encore d'évaluation
- MicrosimounDocument7 pagesMicrosimounBouallegue MounirPas encore d'évaluation
- 4.2 Estimation Du Couple Aérodynamique 4.2.1 Estimation Par Filtrage de KalmanDocument2 pages4.2 Estimation Du Couple Aérodynamique 4.2.1 Estimation Par Filtrage de KalmanMendil likiaPas encore d'évaluation
- Chapitre 4 Modélisation Et Simulation Du Système Mécanique de L'éolienDocument11 pagesChapitre 4 Modélisation Et Simulation Du Système Mécanique de L'éolienSalmi Nour E'ddinePas encore d'évaluation
- Les SupportsDocument14 pagesLes SupportsAsser EmmanuellaPas encore d'évaluation
- Introduction GeneraleDocument54 pagesIntroduction Generaleامين البحري꧁Pas encore d'évaluation
- DYN-Dynamique Du Véhicule ÉlectriqueDocument4 pagesDYN-Dynamique Du Véhicule ÉlectriquePutin PutoutPas encore d'évaluation
- Aeroport3 1Document39 pagesAeroport3 1yassineePas encore d'évaluation
- Chap03 PDFDocument129 pagesChap03 PDFnebilePas encore d'évaluation
- Aérage Dans Les MinesDocument2 pagesAérage Dans Les Minesyoussef elmoudenPas encore d'évaluation
- Bac S 2013 Sciences IngenieurDocument11 pagesBac S 2013 Sciences IngenieurLETUDIANTPas encore d'évaluation
- Construction AbaqueDocument16 pagesConstruction AbaqueadsrjmPas encore d'évaluation
- Expose TurbomachineDocument11 pagesExpose TurbomachineKamel Lafala0% (1)
- Dual Inlet Ducted Ramjet CombustorDocument11 pagesDual Inlet Ducted Ramjet CombustorCliff ThrivePas encore d'évaluation
- Les Techniques DétalonnageDocument9 pagesLes Techniques DétalonnageScribdTranslationsPas encore d'évaluation
- Art10!2!10 Dimensionnement Pales Meth ElePale 4Document16 pagesArt10!2!10 Dimensionnement Pales Meth ElePale 4James SmithPas encore d'évaluation
- Caracteristiques AerodynamiquesDocument20 pagesCaracteristiques AerodynamiquesMechmedPas encore d'évaluation
- Simulation Numérique de L'écoulement Autour D'une Éolienne À Axe HorizontalDocument13 pagesSimulation Numérique de L'écoulement Autour D'une Éolienne À Axe HorizontalSel MaPas encore d'évaluation
- TP 3Document13 pagesTP 3Chemseddine kardiPas encore d'évaluation
- MAximisation de La Production de L'énergie ÉolienneDocument6 pagesMAximisation de La Production de L'énergie ÉolienneBibliothèque Al-itkanPas encore d'évaluation
- Les SupportsDocument7 pagesLes SupportsKossai GribPas encore d'évaluation
- 2-Air Comprime 4pDocument4 pages2-Air Comprime 4pAbdelali Choufani100% (1)
- Commande Automatique Dune Eolienne Mars 2023 (Rectified)Document5 pagesCommande Automatique Dune Eolienne Mars 2023 (Rectified)Aym HafPas encore d'évaluation
- TurbinesNN 2 PDFDocument8 pagesTurbinesNN 2 PDFBboubrahim BbnnPas encore d'évaluation
- L'AnémomètreDocument25 pagesL'Anémomètreben massoud RamzyPas encore d'évaluation
- C3F1014Document4 pagesC3F1014woomacPas encore d'évaluation
- TP EolienneDocument8 pagesTP EolienneYahye GuirrehPas encore d'évaluation
- CH 1Document48 pagesCH 1Bilel Ben Amira86% (7)
- Rapport TP ÉolieneDocument14 pagesRapport TP ÉolieneYoussef Amhine100% (6)
- Maximisation de La Puissance ÉolienneDocument3 pagesMaximisation de La Puissance ÉolienneHamouchePas encore d'évaluation
- 4368 Dossier Questions Epreuve E4 Bts Ava 2012 2Document10 pages4368 Dossier Questions Epreuve E4 Bts Ava 2012 2Gabriel ArnalPas encore d'évaluation
- Les Calculs Et Résultats (Avec FLUENT)Document5 pagesLes Calculs Et Résultats (Avec FLUENT)El Pacha SalemPas encore d'évaluation
- Contrôle 4 - 2023Document4 pagesContrôle 4 - 2023Bilal LaakelPas encore d'évaluation
- Partie IIDocument6 pagesPartie IIi.baddouPas encore d'évaluation
- Mah 4973Document118 pagesMah 4973hassen baccarPas encore d'évaluation
- PC GENE SUJET 040 Exo2 Phy CyclismeDocument4 pagesPC GENE SUJET 040 Exo2 Phy CyclismeElias AthanassiadisPas encore d'évaluation
- Article en FrançaisDocument42 pagesArticle en FrançaisOussama MaarirPas encore d'évaluation
- f779x1 2015Document37 pagesf779x1 2015latyrniangPas encore d'évaluation
- SujetDocument4 pagesSujetL'aigle ImposantPas encore d'évaluation
- Fabrica de EmbraguesDocument40 pagesFabrica de EmbraguesJohn Alexander Ramos VargasPas encore d'évaluation
- Probleme de La Motorisation Dun VehiculeDocument22 pagesProbleme de La Motorisation Dun Vehiculeexpert.caleb7Pas encore d'évaluation
- Etude Dun Actionneur Electroactif Pour Deformation de Surface Portante Pour Optimiser LaDocument14 pagesEtude Dun Actionneur Electroactif Pour Deformation de Surface Portante Pour Optimiser LaYoussef NajihPas encore d'évaluation
- Simulation Des Performances Aerodynamiques D'Une Eolienne A Axe HorizontalDocument3 pagesSimulation Des Performances Aerodynamiques D'Une Eolienne A Axe HorizontalMohammed LachhabPas encore d'évaluation
- 03-2023 BS F Banc de Puissance Bases PhysiquesDocument2 pages03-2023 BS F Banc de Puissance Bases PhysiquesOlivier IschiPas encore d'évaluation
- Corrélation Entre Paramètres de Forage Et Profils Pressiométriques Par Autoforage Du Tubage RotostafDocument8 pagesCorrélation Entre Paramètres de Forage Et Profils Pressiométriques Par Autoforage Du Tubage Rotostaftouhami benzakourPas encore d'évaluation
- Cours 6 Eolien 2017Document4 pagesCours 6 Eolien 2017abd elhamid mabroukPas encore d'évaluation
- Projet EolienneDocument9 pagesProjet EolienneAmal ElPas encore d'évaluation
- Asservissement en Attitude D'un DroneDocument10 pagesAsservissement en Attitude D'un DroneYolo BringPas encore d'évaluation
- Chapitre 2 Distribution Du Vent PDFDocument12 pagesChapitre 2 Distribution Du Vent PDFZino MohPas encore d'évaluation
- Filtre adaptatif: Améliorer la vision par ordinateur grâce au filtrage adaptatifD'EverandFiltre adaptatif: Améliorer la vision par ordinateur grâce au filtrage adaptatifPas encore d'évaluation