Vous aimerez peut-être aussi
- Cours Informatique S1 PDFDocument77 pagesCours Informatique S1 PDFaziz dadass50% (2)
- Programmation Avancée Langage CDocument129 pagesProgrammation Avancée Langage CLyes AkramPas encore d'évaluation
- Traité d'économétrie financière: Modélisation financièreD'EverandTraité d'économétrie financière: Modélisation financièrePas encore d'évaluation
- ProgrammerDocument281 pagesProgrammerKacou FatimPas encore d'évaluation
- Rapport de Stage Réalisation D'un ERPDocument51 pagesRapport de Stage Réalisation D'un ERPAkram Dridi95% (63)
- Machines-Outils À Commande Numérique Structure, Modélisation Et RéglageDocument67 pagesMachines-Outils À Commande Numérique Structure, Modélisation Et RéglageMohamed El Hadi Redjaimia69% (16)
- Résumé Et TD RDM TractionDocument23 pagesRésumé Et TD RDM TractionRym KrPas encore d'évaluation
- Pcasm Book FrenchDocument199 pagesPcasm Book FrenchToinoux VisualPas encore d'évaluation
- ProgrammerDocument321 pagesProgrammerkansie_sam100% (1)
- Rapport Final PfeDocument79 pagesRapport Final PfeNouha Ben Marzouk100% (2)
- La Conception Et Le Développement D'une Application de Gestion Des Projets de Fin D'étude LicenceDocument31 pagesLa Conception Et Le Développement D'une Application de Gestion Des Projets de Fin D'étude Licencetinanour100% (1)
- Cours Robotique Intéressant PDFDocument143 pagesCours Robotique Intéressant PDFokacha0amraouy100% (1)
- Introduction à l’analyse des données de sondage avec SPSS : Guide d’auto-apprentissageD'EverandIntroduction à l’analyse des données de sondage avec SPSS : Guide d’auto-apprentissagePas encore d'évaluation
- 2610f Production A Commande Numerique FraisageDocument16 pages2610f Production A Commande Numerique FraisageBoutef El Hachemi0% (1)
- Rapport Pfe 5G C-RANDocument71 pagesRapport Pfe 5G C-RANYoussef ameurPas encore d'évaluation
- Prof: Fayssal: Exercice 01Document11 pagesProf: Fayssal: Exercice 01Safaa Nac50% (2)
- Introduction À La Programmation Des Systèmes Robotiques Industriels. Stéphane BazeilleDocument46 pagesIntroduction À La Programmation Des Systèmes Robotiques Industriels. Stéphane Bazeilleomar100% (1)
- Matlab TPDocument86 pagesMatlab TPkoukouafiri100% (3)
- Chapitre 5 Torsion SimpleDocument12 pagesChapitre 5 Torsion SimpleTech KingPas encore d'évaluation
- Notes de Cours VLSIDocument198 pagesNotes de Cours VLSIMahmoud Doughan50% (2)
- Merlo Roto 45.19MCSS RicambiDocument165 pagesMerlo Roto 45.19MCSS RicambiRene Krebs100% (1)
- Polycopie Cours FaoDocument63 pagesPolycopie Cours FaoDick Man0% (1)
- Projet de Construction Des Machines Machine Signer Q2 2021 2022 BaroneDocument89 pagesProjet de Construction Des Machines Machine Signer Q2 2021 2022 BaroneChristopherBaronePas encore d'évaluation
- TP ASEDocument38 pagesTP ASEferjani yusufPas encore d'évaluation
- tp1 5Document37 pagestp1 5Mathys FlandrePas encore d'évaluation
- Poly PMPDocument46 pagesPoly PMPAbichou IssaPas encore d'évaluation
- TM SJF VersionDocument108 pagesTM SJF VersionFree RdpPas encore d'évaluation
- Rapport BEDocument49 pagesRapport BEiheb.benlakhelPas encore d'évaluation
- Polycopie Systeme À Microcontroller NewDocument85 pagesPolycopie Systeme À Microcontroller NewKamologne UlrichPas encore d'évaluation
- Presentation Cast3MDocument92 pagesPresentation Cast3MThérence Lovel AngouéPas encore d'évaluation
- Cours II2-2014Document89 pagesCours II2-2014NEUILLY DARIUS CHOUDJA FOTSOPas encore d'évaluation
- Robotic ProjectDocument36 pagesRobotic ProjectALA SOUISSIPas encore d'évaluation
- Cours - BOULFEKHAR Samra - Algorithmique Et Structure de Données 1Document91 pagesCours - BOULFEKHAR Samra - Algorithmique Et Structure de Données 1Primer XPas encore d'évaluation
- Rapport Arij Yosra WorkflowDocument90 pagesRapport Arij Yosra WorkflowAhmed HaddadPas encore d'évaluation
- BenzinaDocument51 pagesBenzinaAbdelhamid BenallelPas encore d'évaluation
- TNS TP 2011Document46 pagesTNS TP 2011Zakaria HalouiPas encore d'évaluation
- Rep Stage Rochette CFDDocument54 pagesRep Stage Rochette CFDKhadidja DouPas encore d'évaluation
- Book TMEAutomaticDocument120 pagesBook TMEAutomaticAlix GraccusPas encore d'évaluation
- Cours Infortique Et ProgrammationDocument189 pagesCours Infortique Et ProgrammationdocteurgynecoPas encore d'évaluation
- Aid Mohamed AmineDocument68 pagesAid Mohamed AmineghilesPas encore d'évaluation
- 0410 Bases Informatique ProgrammationDocument189 pages0410 Bases Informatique ProgrammationFloriat BoukatouPas encore d'évaluation
- 0410 Bases Informatique ProgrammationDocument6 pages0410 Bases Informatique ProgrammationHervé DupuisPas encore d'évaluation
- 0127 Formation Architecture OrdinateursDocument110 pages0127 Formation Architecture OrdinateursSalah AllouchiPas encore d'évaluation
- Cours SeDocument115 pagesCours Seilyes ben jemaaPas encore d'évaluation
- Informatique G1 2020 2021Document160 pagesInformatique G1 2020 2021Alexis GinzambaPas encore d'évaluation
- HistSys 2Document290 pagesHistSys 2iyoriePas encore d'évaluation
- Rapport Final Drone Ba3Document43 pagesRapport Final Drone Ba3Léo Vander BekenPas encore d'évaluation
- M221 UserGuide FR EIO0000000977.03Document930 pagesM221 UserGuide FR EIO0000000977.03Amal BATOUPas encore d'évaluation
- Matlab SimulinkDocument80 pagesMatlab SimulinkCrytocom CrytocomPas encore d'évaluation
- Le PID Utilisé en Régulation de Position Et/ou de Vitesse de Moteurs ÉlectriquesDocument24 pagesLe PID Utilisé en Régulation de Position Et/ou de Vitesse de Moteurs ÉlectriquesAlaa BergayaPas encore d'évaluation
- Cours Module ApiDocument80 pagesCours Module ApiChouaibPas encore d'évaluation
- Parcours FreecadDocument191 pagesParcours FreecadnemoxenoPas encore d'évaluation
- Somachine GuideDocument268 pagesSomachine GuideAlioune Badara MboupPas encore d'évaluation
- Poly C++2ADocument83 pagesPoly C++2ATadessé NicolyPas encore d'évaluation
- 0598 Programmation en CDocument94 pages0598 Programmation en CBitsindouPas encore d'évaluation
- Grami 3bisDocument94 pagesGrami 3bis3aslemaa2Pas encore d'évaluation
- Cours MO À CN Djamaa 2020 1Document44 pagesCours MO À CN Djamaa 2020 1hachtilyassPas encore d'évaluation
- PolyDocument147 pagesPolynadinekhPas encore d'évaluation
- SDD Et AlgoDocument80 pagesSDD Et AlgoFidele Baimi BadjouaPas encore d'évaluation
- Chapitre 4Document6 pagesChapitre 4Tech KingPas encore d'évaluation
- Exercices D'application Transmission Par Poulies-Courroies: Construction MécaniqueDocument4 pagesExercices D'application Transmission Par Poulies-Courroies: Construction MécaniqueTech KingPas encore d'évaluation
- Chapitre 1Document8 pagesChapitre 1killersPas encore d'évaluation
- Formulaire D Attestation Sur L Honneur D Absence de Lien de Parente Ou D AllianceDocument2 pagesFormulaire D Attestation Sur L Honneur D Absence de Lien de Parente Ou D AllianceTech KingPas encore d'évaluation
- Attest Prise en ChargeDocument1 pageAttest Prise en ChargeTech KingPas encore d'évaluation
- TD CHAPITRE 4 - Caractéristiques Géométriques Des Sections DroitesDocument7 pagesTD CHAPITRE 4 - Caractéristiques Géométriques Des Sections DroitesTech KingPas encore d'évaluation
- Mécanique Fine 1Document6 pagesMécanique Fine 1Tech KingPas encore d'évaluation
- Correction Examen MN 2STDocument2 pagesCorrection Examen MN 2STTech KingPas encore d'évaluation
- Mécanique Des Matériaux 1Document3 pagesMécanique Des Matériaux 1Tech KingPas encore d'évaluation
- Mécanique Des Matériaux 2Document2 pagesMécanique Des Matériaux 2Tech KingPas encore d'évaluation
- Examen1 Notion Déléments de MachinesDocument4 pagesExamen1 Notion Déléments de MachinesTech KingPas encore d'évaluation
- TD #1 LiaisonsDocument5 pagesTD #1 LiaisonsTech KingPas encore d'évaluation
- Cours CostructionDocument26 pagesCours CostructionTech KingPas encore d'évaluation
- Métaux Et AlliagesDocument4 pagesMétaux Et AlliagesTech KingPas encore d'évaluation
- Serie N1 Foncts Elemtrs S2015 GDocument1 pageSerie N1 Foncts Elemtrs S2015 GTech KingPas encore d'évaluation
- Force HydrostatiqueDocument8 pagesForce HydrostatiqueTech KingPas encore d'évaluation
- Controle 2020 MDFDocument1 pageControle 2020 MDFTech KingPas encore d'évaluation
- SerieN1FonctsElemtrsS2013Solution USTHBDocument4 pagesSerieN1FonctsElemtrsS2013Solution USTHBTech KingPas encore d'évaluation
- En PC Biof 2008 SNDocument6 pagesEn PC Biof 2008 SNEL MEHDI EL HAMDOUCHIPas encore d'évaluation
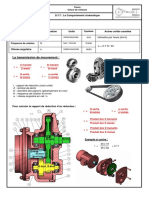
- 7.1 Cours À Remplir FONCTION 3eme Janv2022Document3 pages7.1 Cours À Remplir FONCTION 3eme Janv2022Marguerite DuncanPas encore d'évaluation
- 2797Document4 pages2797Mohammed AmliehPas encore d'évaluation
- Représentation Fonctionnelle D'un Système Technique Doc Prof 2009-2010Document5 pagesReprésentation Fonctionnelle D'un Système Technique Doc Prof 2009-2010Arwa BerrichPas encore d'évaluation
- TD3-Circuits MagnétiquesDocument4 pagesTD3-Circuits MagnétiquesGhizlane FaroukiPas encore d'évaluation
- Analyse MathsDocument66 pagesAnalyse MathskoffiyaowilfriedbrouPas encore d'évaluation
- Série DDocument7 pagesSérie DMessAoudi SaBerPas encore d'évaluation
- MAGISTER. GEE. HACHEMI Naima Nee SEBBATIDocument159 pagesMAGISTER. GEE. HACHEMI Naima Nee SEBBATIhissein ousmanPas encore d'évaluation
- Cours Hydraulique À Surface LibreDocument71 pagesCours Hydraulique À Surface LibreAhmed SoutaissiPas encore d'évaluation
- Criteres D'acceptation - Radiographie - API 1104Document1 pageCriteres D'acceptation - Radiographie - API 1104Karim HADDADPas encore d'évaluation
- Ads Maths MP-3.1 - 2019Document13 pagesAds Maths MP-3.1 - 2019ahmed aboulkacemPas encore d'évaluation
- Solaire À Concentration, Du Présent Au Futur: Gilles FlamantDocument37 pagesSolaire À Concentration, Du Présent Au Futur: Gilles FlamantYou MajPas encore d'évaluation
- Rotation 3ème MathématiquesDocument3 pagesRotation 3ème MathématiquesGhofran NahdiPas encore d'évaluation
- 2018 19 Examen Mai CorrectionDocument5 pages2018 19 Examen Mai CorrectionRidersPas encore d'évaluation
- Lois de Composition InterneDocument3 pagesLois de Composition InterneAhlam El BechariPas encore d'évaluation
- Mpsem 2Document14 pagesMpsem 2Ossama FarajiPas encore d'évaluation
- DL N°3 MPSI4 ElecDocument4 pagesDL N°3 MPSI4 ElecKaoutar SalamPas encore d'évaluation
- Résumé Produit Scalaire Plan 1bacDocument1 pageRésumé Produit Scalaire Plan 1bacjilalixmcPas encore d'évaluation
- Laplace TPDocument4 pagesLaplace TPHanine HmidaPas encore d'évaluation
- BobineDocument5 pagesBobineAmine MohamedPas encore d'évaluation
- Les Expériences de Kirchhoff Et Le Principe de Spectroscopie - RapportDocument19 pagesLes Expériences de Kirchhoff Et Le Principe de Spectroscopie - RapportRifat BALLOTPas encore d'évaluation
- Compte Rendu Du TP N CBDocument9 pagesCompte Rendu Du TP N CBMourad TlmPas encore d'évaluation
- ComposantsPassifs MultonDocument91 pagesComposantsPassifs MultontittouPas encore d'évaluation
- Phys 2 Chap 3Document9 pagesPhys 2 Chap 3Mo HaPas encore d'évaluation
- Compte Rendu TP1 Regulation ELTDocument5 pagesCompte Rendu TP1 Regulation ELTNounou BoulouPas encore d'évaluation
- Fiche Methode 8 Suites GéométriquesDocument2 pagesFiche Methode 8 Suites GéométriqueshPas encore d'évaluation
- Calcul de VitessesDocument2 pagesCalcul de VitessesOualid OuadoudiPas encore d'évaluation