Vous aimerez peut-être aussi
- Le Numerique Au Service Des Sciences CognitivesDocument7 pagesLe Numerique Au Service Des Sciences CognitivesJeanPas encore d'évaluation
- Bride À Machoire (Corrigé) PDFDocument9 pagesBride À Machoire (Corrigé) PDFNaoufel Fares67% (3)
- Enrouleur de RessortDocument5 pagesEnrouleur de RessortMountaser Bouaoud100% (1)
- Projection Orthogonale Dessin Technique PDFDocument2 pagesProjection Orthogonale Dessin Technique PDFBrahim Tires67% (3)
- Devoir de Contrôle N°3 Avec Correction - Génie Mécanique Guidage en Rotation Touret A Meuler - 3ème Technique (2012-2013)Document6 pagesDevoir de Contrôle N°3 Avec Correction - Génie Mécanique Guidage en Rotation Touret A Meuler - 3ème Technique (2012-2013)Kouchad Fouad88% (8)
- Cours PHP Et Mvc1Document44 pagesCours PHP Et Mvc1Sara BenPas encore d'évaluation
- DRM CorrigéDocument6 pagesDRM CorrigéNajet MarsPas encore d'évaluation
- 1.6. Pré-Requis. Installation de Maarch Sous Linux Et Windows. Sommaire. Environnement de La Machine D'installationDocument10 pages1.6. Pré-Requis. Installation de Maarch Sous Linux Et Windows. Sommaire. Environnement de La Machine D'installationSabah El ghrissi100% (1)
- Usiner 4 Rainures Sur Un Arbre Cylindrique: 1. Etude Fonctionnelle: (1.75 PT)Document6 pagesUsiner 4 Rainures Sur Un Arbre Cylindrique: 1. Etude Fonctionnelle: (1.75 PT)Najet MarsPas encore d'évaluation
- L1-PMI - TP 5 Dessin Industriel 2Document4 pagesL1-PMI - TP 5 Dessin Industriel 2Soufa Ane100% (1)
- Dispositif Management Risques Projet Recouvrement STEGDocument85 pagesDispositif Management Risques Projet Recouvrement STEGHamza HajbiPas encore d'évaluation
- Devoir de Contrôle N°2 - Technologie Unité de Préparation de Membrane de Pile À Cmbustible - Bac Technique (2011-2012) MR ABDELLATIF HENI PDFDocument8 pagesDevoir de Contrôle N°2 - Technologie Unité de Préparation de Membrane de Pile À Cmbustible - Bac Technique (2011-2012) MR ABDELLATIF HENI PDFabdelbasset11Pas encore d'évaluation
- Correction Ds1 Systeme Automatise de Marquage de BoitesDocument4 pagesCorrection Ds1 Systeme Automatise de Marquage de BoitesAlami ElPas encore d'évaluation
- TD 1: Compresseur: ON DONNE: Trois Vues Réduites Du Compresseur D'airDocument99 pagesTD 1: Compresseur: ON DONNE: Trois Vues Réduites Du Compresseur D'airCHOKRI Atef100% (1)
- Aller Plus Loin - Apprenez À Créer Votre Site Web Avec HTML5 Et CSS3 - OpenClassroomsDocument8 pagesAller Plus Loin - Apprenez À Créer Votre Site Web Avec HTML5 Et CSS3 - OpenClassroomsandroid itelPas encore d'évaluation
- Devoir de Synthèse N°2 - Technologie MALAXEUR DE SABLE - Bac Technique (2010-2011) MR ZAAFOURI MehrezDocument5 pagesDevoir de Synthèse N°2 - Technologie MALAXEUR DE SABLE - Bac Technique (2010-2011) MR ZAAFOURI MehrezAmira JebaliPas encore d'évaluation
- PygtkDocument109 pagesPygtkSalman Al FarisiPas encore d'évaluation
- Squid Et GuardSquidDocument14 pagesSquid Et GuardSquidSamiLouissePas encore d'évaluation
- Ch1 - Modelisation Des Liaisons-Prof Page 3-7Document8 pagesCh1 - Modelisation Des Liaisons-Prof Page 3-7Sheikh Al-shoteriPas encore d'évaluation
- Technologie: Note: ./20Document3 pagesTechnologie: Note: ./20Marouen MekkiPas encore d'évaluation
- DossiertravailDocument9 pagesDossiertravailMENGUE Benjamin BienvenuPas encore d'évaluation
- Dess 1 Cours - Modelisation - Des - Liaisons - eDocument7 pagesDess 1 Cours - Modelisation - Des - Liaisons - eelvis etiennePas encore d'évaluation
- Devoir de Controle +Liaisons+MécaniquesN2 1AS 2021Document4 pagesDevoir de Controle +Liaisons+MécaniquesN2 1AS 2021Razan KhPas encore d'évaluation
- Enrouleurderessortcorrig 150227132516 Conversion Gate02Document5 pagesEnrouleurderessortcorrig 150227132516 Conversion Gate02Otman OtoPas encore d'évaluation
- Devoir de Controle +Liaisons+MécaniquesN2 1AS 2021Document4 pagesDevoir de Controle +Liaisons+MécaniquesN2 1AS 2021Hamza IsksiouiPas encore d'évaluation
- LiaisonDocument7 pagesLiaisonFadi ZouariPas encore d'évaluation
- Cours - Génie Mécanique - Schéma Cinématique Appui Réglable - 3ème Technique (2016-2017) MR ABIDI MOURAD PDFDocument8 pagesCours - Génie Mécanique - Schéma Cinématique Appui Réglable - 3ème Technique (2016-2017) MR ABIDI MOURAD PDFANDAHMOUPas encore d'évaluation
- Liaisons Schema EleveDocument2 pagesLiaisons Schema ElevewoulkanPas encore d'évaluation
- Devoir de Contrôle N°2 - Technologie MEULE MANUELLE - 1ère AS (2022-2023) MR KMIMECH AdelDocument4 pagesDevoir de Contrôle N°2 - Technologie MEULE MANUELLE - 1ère AS (2022-2023) MR KMIMECH AdelAnta diama sambe100% (1)
- Cours Les Liaison Mecaniques 2016 2017 (ABIDI MOURAD) (Lycée de Fériana)Document8 pagesCours Les Liaison Mecaniques 2016 2017 (ABIDI MOURAD) (Lycée de Fériana)Youssef CherniPas encore d'évaluation
- TD CompresseurDocument7 pagesTD CompresseurNaoufel FaresPas encore d'évaluation
- L1-PMI - TP3 Dessin IndustrièlDocument4 pagesL1-PMI - TP3 Dessin IndustrièlJonathan wawehPas encore d'évaluation
- Liaisons - Cours LiaisonsDocument9 pagesLiaisons - Cours Liaisonsstylo azreg100% (1)
- Chap 4 L5 Symboles Et Mobilité Des LiaisonsDocument38 pagesChap 4 L5 Symboles Et Mobilité Des LiaisonsAbdel Moula ChouchenePas encore d'évaluation
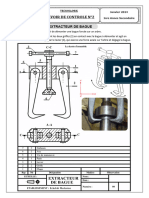
- DC2-2024-Extracteur bague-1ASDocument5 pagesDC2-2024-Extracteur bague-1ASgmar.ghaziPas encore d'évaluation
- Dev 123Document3 pagesDev 123Anis GharbiPas encore d'évaluation
- TD Borne de Reglage EleveDocument6 pagesTD Borne de Reglage EleveDJ-NONO-88 emilioPas encore d'évaluation
- Cours Modelisation Des Liaisons eDocument7 pagesCours Modelisation Des Liaisons eMed Aymen Bensalem100% (1)
- CintreuseDocument6 pagesCintreuseAbdoPas encore d'évaluation
- DS1 3 11 12DPMécaDocument4 pagesDS1 3 11 12DPMécaBouabdellaoui saif ennasr100% (1)
- Chariot Satellite ExerciceDocument4 pagesChariot Satellite ExerciceHAMZAPas encore d'évaluation
- TD Sur Les Embrayage - FreinDocument5 pagesTD Sur Les Embrayage - Freingerard correa86% (7)
- Correction3dr ds1Document4 pagesCorrection3dr ds1zouaghitaher76Pas encore d'évaluation
- Devoir de Synthese #2: Travail DemandéDocument4 pagesDevoir de Synthese #2: Travail DemandéBouabdellaoui saif ennasr100% (1)
- Contrôle Ste 3docxDocument2 pagesContrôle Ste 3docxMouhamed DiengPas encore d'évaluation
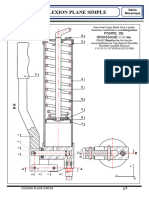
- Flexion Plane SimpleDocument7 pagesFlexion Plane SimpletaiebshowPas encore d'évaluation
- Devoir de Contrôle N°2 - Technologie Mécanisme de Serrage - 2ème Sciences (2011-2012) MR BEMRI - Unlocked BackupDocument4 pagesDevoir de Contrôle N°2 - Technologie Mécanisme de Serrage - 2ème Sciences (2011-2012) MR BEMRI - Unlocked BackupRasmi BaananouPas encore d'évaluation
- Devoir de Contrôle N°2 - Technologie Mécanisme de Serrage - 2ème Sciences (2011-2012) MR BEMRIDocument4 pagesDevoir de Contrôle N°2 - Technologie Mécanisme de Serrage - 2ème Sciences (2011-2012) MR BEMRIAhmed OssamaPas encore d'évaluation
- Dev 12Document3 pagesDev 12Anis GharbiPas encore d'évaluation
- Dev 12345Document3 pagesDev 12345Anis GharbiPas encore d'évaluation
- 3-Liaisons Mécaniques - 3Document7 pages3-Liaisons Mécaniques - 3Alice BenkhabechechePas encore d'évaluation
- 2019-2020-DSN°2-1ère-Vé RéglableDocument7 pages2019-2020-DSN°2-1ère-Vé RéglableAdam BensaidPas encore d'évaluation
- 2016 - 3ISM-Robo Indu-RattDocument5 pages2016 - 3ISM-Robo Indu-Rattcha benPas encore d'évaluation
- Devoir de Contrôle N°3 - Technologie Malaxeur - 1ère AS (2013-2014) MR Laamari Abdallah PDFDocument4 pagesDevoir de Contrôle N°3 - Technologie Malaxeur - 1ère AS (2013-2014) MR Laamari Abdallah PDFchanguelhPas encore d'évaluation
- TP Boite de Vitesses D'un Tour Parallèle 2014 (DR) PDFDocument6 pagesTP Boite de Vitesses D'un Tour Parallèle 2014 (DR) PDFKarim Kilani100% (2)
- N3 2013 MecanismeDeReglageDeCapteurDocument5 pagesN3 2013 MecanismeDeReglageDeCapteurMed Aymen Bensalem100% (1)
- D Synthèse3 2019 1SDocument6 pagesD Synthèse3 2019 1SAdel KmimechPas encore d'évaluation
- CISAILLEMENT 2STM ÉlèveDocument6 pagesCISAILLEMENT 2STM ÉlèveAlami ElPas encore d'évaluation
- Devoir de Synthèse N°2 - Technologie - 1ère AS (2012-2013) MR Abdallah RaouafiDocument4 pagesDevoir de Synthèse N°2 - Technologie - 1ère AS (2012-2013) MR Abdallah RaouafiMounir Ben AouidhaPas encore d'évaluation
- Sym Et Axes de SymetrieDocument3 pagesSym Et Axes de SymetriengonoguerlinPas encore d'évaluation
- Liaisons 2021 DistancielDocument4 pagesLiaisons 2021 DistancielFreezeXPas encore d'évaluation
- Recueil Travaux Dirigés Tech Const PDFDocument62 pagesRecueil Travaux Dirigés Tech Const PDFWafa Raboudi100% (6)
- Genie LogicielDocument142 pagesGenie LogicielMENGA EmmanuelPas encore d'évaluation
- Commandes WindowsDocument3 pagesCommandes WindowsFOOVI Komlan MawuliPas encore d'évaluation
- Chapitre 2Document33 pagesChapitre 2Warda FloraPas encore d'évaluation
- Duolingo - Recherche GoogleDocument1 pageDuolingo - Recherche GoogleIsmail TchichPas encore d'évaluation
- Pense Bête DBA - Fiche 1Document26 pagesPense Bête DBA - Fiche 1Moïse KouadioPas encore d'évaluation
- Exercice Synthese 4 CorrigeDocument4 pagesExercice Synthese 4 CorrigeCotedivoireFreedomPas encore d'évaluation
- Cet Article Vous Permettra de Bien Configurer Le Firewall Zone Alarm ProDocument13 pagesCet Article Vous Permettra de Bien Configurer Le Firewall Zone Alarm ProSef SandManPas encore d'évaluation
- Eyes of NetworkDocument32 pagesEyes of NetworkMohsine Merzouk100% (4)
- POO C++ - 2 - OpenClassroomsDocument9 pagesPOO C++ - 2 - OpenClassroomsJosias NdjikiPas encore d'évaluation
- ExercicesDocument9 pagesExercicesAsmaa Marzak El HanniPas encore d'évaluation
- Faq AccessDocument428 pagesFaq Accessregismalt100% (2)
- Docker - Exposé Document FinalDocument25 pagesDocker - Exposé Document FinalIvan ApedoPas encore d'évaluation
- Etude de Cas QuickDocument18 pagesEtude de Cas QuickbourdonPas encore d'évaluation
- Stratégie Et Contrôle - Séance IV-Chapitre IntroductifDocument29 pagesStratégie Et Contrôle - Séance IV-Chapitre IntroductifAbdelaziz MoufakkirPas encore d'évaluation
- CV - HBA - Français - 3-12-19-TechDocument2 pagesCV - HBA - Français - 3-12-19-TechaminPas encore d'évaluation
- Sujet TP SambaDocument2 pagesSujet TP SambaImade EddinePas encore d'évaluation
- 1mdu02005 FR Re 216Document1 098 pages1mdu02005 FR Re 216chichid2008Pas encore d'évaluation
- Comptage Temporaire Du Trafic RoutierDocument76 pagesComptage Temporaire Du Trafic RoutierSouFiane MansouRiPas encore d'évaluation
- SommaireDocument11 pagesSommaireAchraf IbrahimiPas encore d'évaluation
- TUTO PythonDocument9 pagesTUTO PythonAlbin PuelPas encore d'évaluation
- Cours SGBDDocument5 pagesCours SGBDMed Amine RihaniPas encore d'évaluation
- EBP Devis Facturation GuideDocument36 pagesEBP Devis Facturation Guiderome220181Pas encore d'évaluation