Vous aimerez peut-être aussi
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesD'EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesPas encore d'évaluation
- Les Liaisons Non Permanentes (ASSEMBLAGES) CH 04 1er Année GPLDocument14 pagesLes Liaisons Non Permanentes (ASSEMBLAGES) CH 04 1er Année GPLTom BriderPas encore d'évaluation
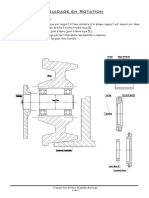
- Devoir de Contrôle N°3 Avec Correction - Génie Mécanique Guidage en Rotation Touret A Meuler - 3ème Technique (2012-2013)Document6 pagesDevoir de Contrôle N°3 Avec Correction - Génie Mécanique Guidage en Rotation Touret A Meuler - 3ème Technique (2012-2013)Kouchad Fouad88% (8)
- 01-Lecon1 Analyse Fonctionnelle 2012-13Document8 pages01-Lecon1 Analyse Fonctionnelle 2012-13Med Aymen Bensalem100% (1)
- Devoir de Contrôle N°3 - Technologie - TOUR SEMI-AUTOMATIQUE - 3ème Technique (2015-2016) MR Mnejja SlimDocument7 pagesDevoir de Contrôle N°3 - Technologie - TOUR SEMI-AUTOMATIQUE - 3ème Technique (2015-2016) MR Mnejja SlimMed Aymen Bensalem67% (3)
- Le Plan Astral - C.W.leadbeaterDocument150 pagesLe Plan Astral - C.W.leadbeaterk_shunettePas encore d'évaluation
- Devoir de Contrôle N°1 - Génie Mécanique DC Pompe D'alimentation - 3ème Technique (2013-2014) MR Mlaouhi SlaheddineDocument6 pagesDevoir de Contrôle N°1 - Génie Mécanique DC Pompe D'alimentation - 3ème Technique (2013-2014) MR Mlaouhi SlaheddineBen nasseur Mohamed aliPas encore d'évaluation
- Exercice ReducteurDocument8 pagesExercice ReducteurGyPas encore d'évaluation
- Unité de Remplissage de BouteillesDocument4 pagesUnité de Remplissage de BouteillesMed Aymen Bensalem0% (1)
- 07-TD Modelisation Des Liaisons-EDocument5 pages07-TD Modelisation Des Liaisons-EMed Aymen BensalemPas encore d'évaluation
- 07-TD Modelisation Des Liaisons-EDocument5 pages07-TD Modelisation Des Liaisons-EMed Aymen BensalemPas encore d'évaluation
- Cotes Tolerancees EleveDocument2 pagesCotes Tolerancees Elevesamir ghebouliPas encore d'évaluation
- Archimede - de La Mesure Du CercleDocument9 pagesArchimede - de La Mesure Du CerclejprolinPas encore d'évaluation
- 27 Lubrification ÉtanchéitéDocument4 pages27 Lubrification ÉtanchéitéAnonymous Zu0p0SWg7Pas encore d'évaluation
- TD Compresseur PR PDFDocument6 pagesTD Compresseur PR PDFzohirPas encore d'évaluation
- Procedes D'asemblageDocument85 pagesProcedes D'asemblageImed SeghierPas encore d'évaluation
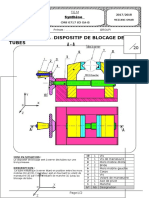
- Devoir de Controle N3-1AS-2014-Blocage Des TubesDocument3 pagesDevoir de Controle N3-1AS-2014-Blocage Des TubesomatrPas encore d'évaluation
- Chapitre 2 - Partie 1 - CSMTDocument28 pagesChapitre 2 - Partie 1 - CSMTsalman wardiPas encore d'évaluation
- Reparation Et Protection Des Ouvrages en Beton. NIT 231. 2007 - CSTC - BEDocument66 pagesReparation Et Protection Des Ouvrages en Beton. NIT 231. 2007 - CSTC - BEkakem61100% (3)
- Devoir de Synthèse N°1 - Technologie - 2ème Sciences Exp (2018-2019) MR KMIMECH Adel PDFDocument7 pagesDevoir de Synthèse N°1 - Technologie - 2ème Sciences Exp (2018-2019) MR KMIMECH Adel PDFadnenPas encore d'évaluation
- Normale Corigé 2012 PDFDocument8 pagesNormale Corigé 2012 PDFGuiliassPas encore d'évaluation
- Dess 1 Cours - Modelisation - Des - Liaisons - eDocument7 pagesDess 1 Cours - Modelisation - Des - Liaisons - eelvis etiennePas encore d'évaluation
- Cours Modelisation Des Liaisons PRDocument4 pagesCours Modelisation Des Liaisons PRAgriIT •Pas encore d'évaluation
- Cours Modelisation Des LiaisonsDocument4 pagesCours Modelisation Des LiaisonsAristide DOSSOUPas encore d'évaluation
- Dossier Réponses Page 1 / 8 Unite de Remplissage de FlaconsDocument3 pagesDossier Réponses Page 1 / 8 Unite de Remplissage de FlaconsMortadha RabahPas encore d'évaluation
- امتحان علوم المهندسDocument12 pagesامتحان علوم المهندسMoradLeglilPas encore d'évaluation
- NnneDocument10 pagesNnneYACOUBA BIYRNPas encore d'évaluation
- Devoir de Contrôle N°1 (DP) - Technologie - 3ème Tech (2009-2010) MR Jemmali Hassen Main de RobotDocument4 pagesDevoir de Contrôle N°1 (DP) - Technologie - 3ème Tech (2009-2010) MR Jemmali Hassen Main de RobotArfaoui AymenPas encore d'évaluation
- Etau Orientable PDFDocument6 pagesEtau Orientable PDFTALMOUDI HEDIAPas encore d'évaluation
- CS LP TP Pyvot SujetDocument20 pagesCS LP TP Pyvot Sujetpierre chantelotPas encore d'évaluation
- Technologie: Devoir de Contrôle N°1 Section Sciences Techniques ÉpreuveDocument2 pagesTechnologie: Devoir de Contrôle N°1 Section Sciences Techniques ÉpreuveBouabdellaoui saif ennasrPas encore d'évaluation
- Ve ReglableDocument1 pageVe Reglablesarah09112008Pas encore d'évaluation
- Dessin de Construction Mécanique Par M. NGOUPAYEDocument70 pagesDessin de Construction Mécanique Par M. NGOUPAYEChristian DinhoPas encore d'évaluation
- ChainesFermees Applications 01Document4 pagesChainesFermees Applications 01Tigma AarousPas encore d'évaluation
- Liaison EncastrementDocument18 pagesLiaison Encastrementkhocine100% (1)
- 208 Prehenseur CorrigeDocument4 pages208 Prehenseur CorrigeAhmed TalsiPas encore d'évaluation
- Devoir de Contrôle N°2 - Technologie Bride de Serrage Bride de Serrage - 1ère AS (2011-2012) MR HENI ABDELLATIF PDFDocument3 pagesDevoir de Contrôle N°2 - Technologie Bride de Serrage Bride de Serrage - 1ère AS (2011-2012) MR HENI ABDELLATIF PDFAnta diama sambePas encore d'évaluation
- Corrigé Des Exercices Module Technologie Exercices: Surface Ou L'organe de LiaisonDocument8 pagesCorrigé Des Exercices Module Technologie Exercices: Surface Ou L'organe de LiaisonpinamarkPas encore d'évaluation
- Progr WAMBA + Plan TECHNO CONST-2019-2020Document4 pagesProgr WAMBA + Plan TECHNO CONST-2019-2020Christian NoelPas encore d'évaluation
- EXERCICE10Document8 pagesEXERCICE10akouPas encore d'évaluation
- DTDocument3 pagesDTMrnadhir MecaniquePas encore d'évaluation
- CH 2 Dessin D'ensemble 2022Document4 pagesCH 2 Dessin D'ensemble 2022Tarek AyariPas encore d'évaluation
- 01 Exercice BanderoleuseDocument1 page01 Exercice BanderoleuseESSOME ESSOME OLIVIER STEPHANEPas encore d'évaluation
- Guidage en Translation PDFDocument10 pagesGuidage en Translation PDFAzerty DelegfrPas encore d'évaluation
- Exercice REPRESENTATION DES FILETAGESDocument1 pageExercice REPRESENTATION DES FILETAGESkingslimPas encore d'évaluation
- Cours MicrDocument30 pagesCours MicrDOUNIAPas encore d'évaluation
- Serre Joint Dessin D'ensembleDocument1 pageSerre Joint Dessin D'ensembleAbdeslam Elmrabet100% (1)
- Ge Esa 2018Document16 pagesGe Esa 2018othmane mrichPas encore d'évaluation
- 04 Came PDFDocument1 page04 Came PDFSam DikoPas encore d'évaluation
- 8c64r Projection PDFDocument21 pages8c64r Projection PDFkhalid3mendounPas encore d'évaluation
- Tct-Controle-N2 S2Document5 pagesTct-Controle-N2 S2Ayyub ShabibPas encore d'évaluation
- app6-STE-STM-SMB - Destribution de Tubes - RepDocument10 pagesapp6-STE-STM-SMB - Destribution de Tubes - RepTouriya MoukhlesPas encore d'évaluation
- TD Systèmes ArticulésDocument6 pagesTD Systèmes ArticulésAya El RhayourPas encore d'évaluation
- Compléter L'actigramme A0 de La Fonction Globale D'un CompresseurDocument2 pagesCompléter L'actigramme A0 de La Fonction Globale D'un CompresseurNoureddine HermetienPas encore d'évaluation
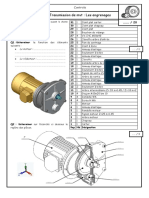
- Transm TCTDocument9 pagesTransm TCTMohamed LarbiPas encore d'évaluation
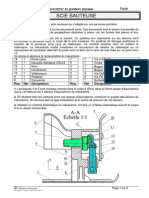
- TP Scie SauteuseDocument5 pagesTP Scie SauteuseremivsnPas encore d'évaluation
- Cours Composition de Mouvement de Vitesse LvesDocument5 pagesCours Composition de Mouvement de Vitesse LvesziedttPas encore d'évaluation
- 6 - Bride de SerrageDocument3 pages6 - Bride de SerrageElmouden MustaphaPas encore d'évaluation
- TD 30 - Représentation D'une Fonction Logique PDFDocument4 pagesTD 30 - Représentation D'une Fonction Logique PDFbhs channelPas encore d'évaluation
- 4 - Montage Des Roulements Et Des CoussinetsDocument10 pages4 - Montage Des Roulements Et Des CoussinetsISMAILPas encore d'évaluation
- TD20 Scie SauteuseDocument2 pagesTD20 Scie SauteuseNabiha LabidiPas encore d'évaluation
- Corrige DS2 3ST DT DR GM GE Region KairouanDocument8 pagesCorrige DS2 3ST DT DR GM GE Region KairouanBouabdellaoui saif ennasrPas encore d'évaluation
- DS1 - 1èr STEDocument4 pagesDS1 - 1èr STEmasteratsii100% (1)
- Cine Graph EleveDocument8 pagesCine Graph EleveMohammed DahbiPas encore d'évaluation
- 8fa9r GriffeDocument2 pages8fa9r GriffeSimo StitPas encore d'évaluation
- 2-Devoir de Controle N1-2AS-2021.31Document4 pages2-Devoir de Controle N1-2AS-2021.31Youssef Aouadi100% (1)
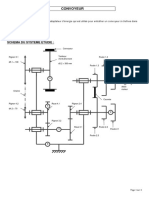
- Exercice ConvoyeurDocument6 pagesExercice ConvoyeurHajar AmalouPas encore d'évaluation
- CC1 Im1 Ie1 17 18Document1 pageCC1 Im1 Ie1 17 18Hamza RimiPas encore d'évaluation
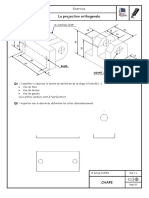
- Exercice Chape Dessin CoteDocument2 pagesExercice Chape Dessin CoteABDELHAKIMPas encore d'évaluation
- d2 Éme C1Document4 pagesd2 Éme C1Med Aymen BensalemPas encore d'évaluation
- 2-Devoir de Controle N1-1AS-2021-FLBDocument2 pages2-Devoir de Controle N1-1AS-2021-FLBMed Aymen BensalemPas encore d'évaluation
- Exercice LiaisonDocument2 pagesExercice LiaisonMed Aymen BensalemPas encore d'évaluation
- DS3 LAISONS FL-1AS-Bride+a+machoires - 2015Document5 pagesDS3 LAISONS FL-1AS-Bride+a+machoires - 2015Med Aymen BensalemPas encore d'évaluation
- Devoir de Contrôle N°1 (2A) TMDocument4 pagesDevoir de Contrôle N°1 (2A) TMMed Aymen BensalemPas encore d'évaluation
- Correction Devoirdecontrolen2 1as 2019Document2 pagesCorrection Devoirdecontrolen2 1as 2019Med Aymen BensalemPas encore d'évaluation
- 02 TerminologieDocument16 pages02 TerminologiekhocinePas encore d'évaluation
- Soll I CitationDocument1 pageSoll I CitationMed Aymen BensalemPas encore d'évaluation
- 2A Devoir S1 (TM)Document8 pages2A Devoir S1 (TM)Med Aymen BensalemPas encore d'évaluation
- Test2 1°A SollcitationDocument1 pageTest2 1°A SollcitationMed Aymen BensalemPas encore d'évaluation
- DC 1 Devoir DC G2 CorrectionDocument4 pagesDC 1 Devoir DC G2 CorrectionMed Aymen BensalemPas encore d'évaluation
- Devoir SollicitationDocument1 pageDevoir SollicitationMed Aymen BensalemPas encore d'évaluation
- Devoir de Synthèse N°1 - Technologie - 1ère AS (2002-2003) MR GassoumiDocument4 pagesDevoir de Synthèse N°1 - Technologie - 1ère AS (2002-2003) MR GassoumiMed Aymen BensalemPas encore d'évaluation
- Application 1 Er AnnéeDocument1 pageApplication 1 Er AnnéeMed Aymen BensalemPas encore d'évaluation
- Représentation Fonctionnelle D'un Système 2012Document5 pagesReprésentation Fonctionnelle D'un Système 2012Med Aymen BensalemPas encore d'évaluation
- Cours Guidage TranslationDocument12 pagesCours Guidage TranslationKali Abdennour0% (1)
- Liaisons PDFDocument8 pagesLiaisons PDFTriki BilelPas encore d'évaluation
- Logique CombinatoireDocument5 pagesLogique CombinatoireMed Aymen BensalemPas encore d'évaluation
- N3 2013 MecanismeDeReglageDeCapteurDocument5 pagesN3 2013 MecanismeDeReglageDeCapteurMed Aymen Bensalem100% (1)
- Dimensionnement ClavetteDocument4 pagesDimensionnement ClavetteSimoMonkadPas encore d'évaluation
- Chariot MonorailDocument1 pageChariot MonorailMed Aymen BensalemPas encore d'évaluation
- Analyse Fonct InterneDocument9 pagesAnalyse Fonct InterneMed Aymen BensalemPas encore d'évaluation
- MillMax® - IAA - Juillet 2007 - 2Document4 pagesMillMax® - IAA - Juillet 2007 - 2Sidi IbrahimPas encore d'évaluation
- Milieux PoreuxDocument12 pagesMilieux PoreuxMed JimiPas encore d'évaluation
- DIV-1999-0053 Lois de Comportement Des Geomateriaux Et Modelisation Par La Methode Des Elements FinisDocument196 pagesDIV-1999-0053 Lois de Comportement Des Geomateriaux Et Modelisation Par La Methode Des Elements FinisAntoine PhilippePas encore d'évaluation
- Cours - Sciences Physiques Oscillations Forcées - Bac Sciences Exp (2014-2015) MR Sdiri AnisDocument4 pagesCours - Sciences Physiques Oscillations Forcées - Bac Sciences Exp (2014-2015) MR Sdiri AnistorkitaherPas encore d'évaluation
- Mini Projet LaserDocument13 pagesMini Projet Lasersihamarbaz14Pas encore d'évaluation
- AO102Document203 pagesAO102Mahmoud HamdiPas encore d'évaluation
- Corrige ES Centres Etrangers 13 Juin 2019 RRDocument5 pagesCorrige ES Centres Etrangers 13 Juin 2019 RRMamadou diopPas encore d'évaluation
- CCS MP 2016 BrasManipulateurCollaboratif SujetDocument15 pagesCCS MP 2016 BrasManipulateurCollaboratif Sujetkim AYAPas encore d'évaluation
- Module ThermoDocument6 pagesModule ThermoSara LoryPas encore d'évaluation
- Chapitre 5Document6 pagesChapitre 5Monkey D luffyPas encore d'évaluation
- Equations DifferentiellesDocument46 pagesEquations DifferentiellesTHONYPas encore d'évaluation
- Fiche de Travaux Diriges Tles C Suites CorrigesDocument78 pagesFiche de Travaux Diriges Tles C Suites CorrigesBadara Aliou Kone100% (1)
- Calculer La Pression OsmotiqueDocument4 pagesCalculer La Pression OsmotiqueBen Yahya Ezzeddine100% (1)
- TD 22018 SolDocument5 pagesTD 22018 SolsabrinePas encore d'évaluation
- Test MatemathiquesDocument28 pagesTest MatemathiquesPaul Giovanny MaPas encore d'évaluation
- Movitrac 31CDocument108 pagesMovitrac 31Cmourad bjijPas encore d'évaluation
- Panne CDocument1 pagePanne CAndo Jean RochelPas encore d'évaluation
- Espaces Vectoriels (Chap21)Document28 pagesEspaces Vectoriels (Chap21)AIMAD ESSAKHIPas encore d'évaluation
- Chap IDocument64 pagesChap ITaheni Ben AmorPas encore d'évaluation
- Exercices Sur Les PrimitivesDocument3 pagesExercices Sur Les Primitivessjaubert100% (3)
- Glossaire Lettre CDocument16 pagesGlossaire Lettre Ckakem61Pas encore d'évaluation
- CH 6 Analyse Dimensionnelle Et SimilitudesDocument19 pagesCH 6 Analyse Dimensionnelle Et SimilitudesAhamadi Elhouyoun100% (1)
- TD Espaces Vectoriels 2019Document7 pagesTD Espaces Vectoriels 2019Masro Masro2018Pas encore d'évaluation
- TP Analyse GranulométriqueDocument3 pagesTP Analyse GranulométriqueLalia MimiPas encore d'évaluation
- GC Enit Pfe2013Document23 pagesGC Enit Pfe2013saddi akramPas encore d'évaluation
- Notes de CoursDocument85 pagesNotes de Courskajjoui mohamedPas encore d'évaluation
- LounisAzzedine YamouneODocument118 pagesLounisAzzedine YamouneOZorba ZorbaPas encore d'évaluation