Vous aimerez peut-être aussi
- Cas IS AmortissementsDocument3 pagesCas IS AmortissementsT. AndersonPas encore d'évaluation
- Is - Corrigé de L - Étude de Cas Ayda (Version 2016)Document5 pagesIs - Corrigé de L - Étude de Cas Ayda (Version 2016)Hicham DaouchPas encore d'évaluation
- TD1 L3 AnumDocument2 pagesTD1 L3 AnumYoussef DahaniPas encore d'évaluation
- TD Méthode Numérique 1 2 3 4 5 6 2022Document28 pagesTD Méthode Numérique 1 2 3 4 5 6 2022aymen.hoggas400Pas encore d'évaluation
- MMCDocument2 pagesMMCYouss EfPas encore d'évaluation
- Sujet TP1Document3 pagesSujet TP1v9vw7zrrmqPas encore d'évaluation
- TD MatlabDocument5 pagesTD MatlabMbarka AadiPas encore d'évaluation
- Systime LiniéreDocument3 pagesSystime LiniéreYassinPas encore d'évaluation
- Modes DirichletDocument2 pagesModes Dirichletjean-christophe ToussaintPas encore d'évaluation
- Exam Math 6 PDFDocument5 pagesExam Math 6 PDFAbderrahmanePas encore d'évaluation
- TP1 AjustementDocument1 pageTP1 AjustementNinjaBearPas encore d'évaluation
- 2022_TD_MA100_MNDocument18 pages2022_TD_MA100_MNsixdelav76Pas encore d'évaluation
- MA Examen 0506Document11 pagesMA Examen 0506Samir KarimPas encore d'évaluation
- TD05Document22 pagesTD05JoasPas encore d'évaluation
- 6142fc4aa5489ISE CL AS 2021 SujetsDocument13 pages6142fc4aa5489ISE CL AS 2021 SujetsIvan AdouPas encore d'évaluation
- Exam Math 6Document5 pagesExam Math 6Rebhi Akram oualidPas encore d'évaluation
- MT09 A10 EM CorrigeDocument6 pagesMT09 A10 EM CorrigeDjimramadji JosuéPas encore d'évaluation
- polySeriesChros PDFDocument31 pagespolySeriesChros PDFNoureddineLahouelPas encore d'évaluation
- Yaya Toure L2Modelisation Projet EDO Simulation Numerique Du Systeme OscillantDocument15 pagesYaya Toure L2Modelisation Projet EDO Simulation Numerique Du Systeme OscillantYaya TouréPas encore d'évaluation
- An1 tp1Document3 pagesAn1 tp1Manal ChehbiPas encore d'évaluation
- Eq Non LineaireDocument5 pagesEq Non LineaireAmel Elfirjani100% (2)
- Enl 22Document8 pagesEnl 22hnainia mohamed dhiaaPas encore d'évaluation
- TP 4 Mines OptimDocument3 pagesTP 4 Mines OptimMohamed DallagiPas encore d'évaluation
- 20 Trigo TDocument10 pages20 Trigo TBIKOLA FFPas encore d'évaluation
- Série 2 Analyse Numérique 1Document2 pagesSérie 2 Analyse Numérique 1k.mkami211Pas encore d'évaluation
- Chapitre 1 Introduction Et Définition de L'analyse Numérique PDFDocument7 pagesChapitre 1 Introduction Et Définition de L'analyse Numérique PDFETUSUPPas encore d'évaluation
- L 3 Algo 2021 TD7Document3 pagesL 3 Algo 2021 TD7Malek MradPas encore d'évaluation
- Sujet IG-2006Document8 pagesSujet IG-2006Atou RamPas encore d'évaluation
- Sec Mines 2006 Mathsspe PDFDocument4 pagesSec Mines 2006 Mathsspe PDFprepamontaPas encore d'évaluation
- Devoir d'analyse numérique MI3Document2 pagesDevoir d'analyse numérique MI3Daouda KaborePas encore d'évaluation
- 01 TD Virgule FlottanteDocument4 pages01 TD Virgule FlottanteHanen ChaibPas encore d'évaluation
- TD 1Document2 pagesTD 1Wilson GoullaPas encore d'évaluation
- Examen 2013 PDFDocument4 pagesExamen 2013 PDFEl MagoPas encore d'évaluation
- TD3 Algebre2 S2 A 2020 2021Document2 pagesTD3 Algebre2 S2 A 2020 2021Loic EffaPas encore d'évaluation
- ST Uipa 2020Document5 pagesST Uipa 2020Javis Anderson100% (1)
- 2019 ML TD3 - CorDocument7 pages2019 ML TD3 - Corzizou zouziPas encore d'évaluation
- Ds 01Document3 pagesDs 01Ouss BenPas encore d'évaluation
- TD2___Résolution_numérique_d_équations_hyperboliques_linéaires_en_1DDocument33 pagesTD2___Résolution_numérique_d_équations_hyperboliques_linéaires_en_1DselsabilrouahiPas encore d'évaluation
- TDs Outils MathsDocument4 pagesTDs Outils MathsYoucef BoukhalfaPas encore d'évaluation
- Anx 12Document10 pagesAnx 12drissamohamedfanePas encore d'évaluation
- Apprentissage Automatique Feuille D'exercices: Exercice 1Document6 pagesApprentissage Automatique Feuille D'exercices: Exercice 1Med Djameleddine Bougrine100% (1)
- SVT Examen Session Rat 2019 2020Document1 pageSVT Examen Session Rat 2019 2020Reda BPas encore d'évaluation
- Cours 2012Document39 pagesCours 2012alexandre diakhatePas encore d'évaluation
- Examen MNI Mai 2019 PDFDocument2 pagesExamen MNI Mai 2019 PDFsloPas encore d'évaluation
- TD Calcul NumériqueDocument3 pagesTD Calcul NumériqueDiop AhmadPas encore d'évaluation
- TD2201 ReponsesDocument5 pagesTD2201 ReponsesDavid SalahPas encore d'évaluation
- 06 Devoir 07 01 2013Document2 pages06 Devoir 07 01 2013Bourama DjirePas encore d'évaluation
- dst2 2023Document4 pagesdst2 2023ezida diwePas encore d'évaluation
- Examen09 CorrigeDocument8 pagesExamen09 CorrigehamzaPas encore d'évaluation
- Exemples TpsDocument20 pagesExemples TpsSarra BÉCHIRIPas encore d'évaluation
- Exercice S Geo DiffDocument10 pagesExercice S Geo DiffGEOFFROY AIHOU100% (1)
- Esa Examen Analyse Numerique GC SUPER STACO 2019 2020Document2 pagesEsa Examen Analyse Numerique GC SUPER STACO 2019 2020CRUZ FXPas encore d'évaluation
- Exament Corriger Paris 7Document4 pagesExament Corriger Paris 7Saaid WebPas encore d'évaluation
- Ise CL As 2023 SujetsDocument12 pagesIse CL As 2023 SujetsSchadrac Sylvestre Bouilong BaliabaPas encore d'évaluation
- Examen-2023-2024Document4 pagesExamen-2023-2024Ludovic NtepPas encore d'évaluation
- CC3 v3Document2 pagesCC3 v3ogPas encore d'évaluation
- Examen MLG SP 22 23Document4 pagesExamen MLG SP 22 23Ferdaws ZiadiaPas encore d'évaluation
- 2 OndesDocument13 pages2 OndesddouaPas encore d'évaluation
- Cnaem Maths Ect 2017Document5 pagesCnaem Maths Ect 2017Profchaari SciencesPas encore d'évaluation
- Concours_Commun_Polytechniques_(CCINP)_2017_MP_Mathématiques_1_caDocument5 pagesConcours_Commun_Polytechniques_(CCINP)_2017_MP_Mathématiques_1_camap35.chessPas encore d'évaluation
- Corrige TypeDocument4 pagesCorrige Typedjamel bentorkiaPas encore d'évaluation
- Chimie QuantiqueDocument5 pagesChimie Quantiquedavinccicode100% (1)
- AFAM - Projet de RechercheDocument23 pagesAFAM - Projet de RechercheAlbert Francis Abega MekongoPas encore d'évaluation
- Cours 3 ProthèseDocument4 pagesCours 3 ProthèseDDan2005Pas encore d'évaluation
- Distr ProbaDocument37 pagesDistr ProbaOumaima OughnimaPas encore d'évaluation
- Cours OrdonnacementDocument17 pagesCours OrdonnacementMed ArefPas encore d'évaluation
- AUguste Blanqui L'Éternité Par Les AstresDocument79 pagesAUguste Blanqui L'Éternité Par Les AstresYvan KalievPas encore d'évaluation
- Methode de TravailDocument2 pagesMethode de Travailamal akhoulouPas encore d'évaluation
- Mur Types PDFDocument76 pagesMur Types PDFWafaa ElyaâgoubiPas encore d'évaluation
- TIG Ta33 Panneau de Commande FRDocument22 pagesTIG Ta33 Panneau de Commande FRk.a55Pas encore d'évaluation
- Chauffeur SPLDocument1 pageChauffeur SPLmeryem.vfsPas encore d'évaluation
- Hygiène HospitalièreDocument4 pagesHygiène HospitalièreJamal MalouPas encore d'évaluation
- Examples Questions Examen AcoustiqueDocument4 pagesExamples Questions Examen AcoustiquePierreFontenellePas encore d'évaluation
- Les Thèmes Du Dalf C1Document28 pagesLes Thèmes Du Dalf C1Ioana Babarus100% (1)
- 1sm G Fonction Ex SeulDocument5 pages1sm G Fonction Ex SeulSouhail El AsferPas encore d'évaluation
- Syllabus LAITS ET PRODUITS LAITIERS - 2Document3 pagesSyllabus LAITS ET PRODUITS LAITIERS - 2Gedion DouaPas encore d'évaluation
- Matièreexamen 4 Ème Aet DDocument6 pagesMatièreexamen 4 Ème Aet DToby 17Pas encore d'évaluation
- Item 362 - AesDocument4 pagesItem 362 - AesSofia RhellabPas encore d'évaluation
- Estem: Eau Dans Le SolDocument27 pagesEstem: Eau Dans Le SolAlli BoukhchPas encore d'évaluation
- Page D'accueil - Espace Élèves - PRONOTE 2023.0.2.7 - Centre National d' Enseignement E-LearningDocument1 pagePage D'accueil - Espace Élèves - PRONOTE 2023.0.2.7 - Centre National d' Enseignement E-LearningzhcczgfbmwPas encore d'évaluation
- Solution TD3 Module POO Univ OuarglaDocument7 pagesSolution TD3 Module POO Univ OuarglaEmna KanzariPas encore d'évaluation
- Exam MDMDocument4 pagesExam MDMHaithem AminePas encore d'évaluation
- Sup'air SellettesDocument1 pageSup'air SellettesStefanoPas encore d'évaluation
- Sco BP1Document5 pagesSco BP1Philippe Diego DelasvegasPas encore d'évaluation
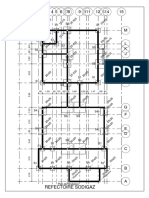
- Structure REFECTOIRE SODIGAZ PDFDocument44 pagesStructure REFECTOIRE SODIGAZ PDFheheheyPas encore d'évaluation
- ToyotismeDocument4 pagesToyotismeAbdelkarimPas encore d'évaluation
- TD2 MCC Corrigé InfotroniqueDocument3 pagesTD2 MCC Corrigé InfotroniqueRima AlayaPas encore d'évaluation
- S o Mortaiseuse MechesDocument2 pagesS o Mortaiseuse Mechesp bwPas encore d'évaluation
- NF EN 1993-1-7 NA Aout 2008Document4 pagesNF EN 1993-1-7 NA Aout 2008fauvyPas encore d'évaluation