Vous aimerez peut-être aussi
- MVA013 Exos Equ Diff Matrices Corrige Cle092b96 PDFDocument4 pagesMVA013 Exos Equ Diff Matrices Corrige Cle092b96 PDFMalik MakPas encore d'évaluation
- Td4commun IDocument8 pagesTd4commun IYassminaPas encore d'évaluation
- Cor - TD Edo 2020 5 Exos3 4Document2 pagesCor - TD Edo 2020 5 Exos3 4Ahmed AbbassiPas encore d'évaluation
- Equations Diff ErentiellesDocument2 pagesEquations Diff ErentiellesSidaoui Med AliPas encore d'évaluation
- Tpe SNLDocument6 pagesTpe SNLdilanho takamPas encore d'évaluation
- TD5 L3 EdoDocument2 pagesTD5 L3 EdoAdam Mahamat AbdramanePas encore d'évaluation
- TD de Systèmes Dyn - Chaos2015 - 2016Document9 pagesTD de Systèmes Dyn - Chaos2015 - 2016Cédric KuetePas encore d'évaluation
- Cours ProbasL3-Chap4Document8 pagesCours ProbasL3-Chap4mouna MAYOUFPas encore d'évaluation
- TD6 MP-PEIP Calculus 21 Eq - DiifDocument2 pagesTD6 MP-PEIP Calculus 21 Eq - DiifjordanxvierPas encore d'évaluation
- TD6 MP-PEIP Calculus 21 Eq - Diif CorrigéDocument5 pagesTD6 MP-PEIP Calculus 21 Eq - Diif CorrigéjordanxvierPas encore d'évaluation
- TD Probabilité 2Document3 pagesTD Probabilité 2Allouan JeanPas encore d'évaluation
- Taik TD1 AN3Document5 pagesTaik TD1 AN3atika kabouyaPas encore d'évaluation
- EDO EDP m1-td3-2020Document4 pagesEDO EDP m1-td3-2020Marc TentiPas encore d'évaluation
- Equation de La ChaleurDocument6 pagesEquation de La ChaleurKader MilanoPas encore d'évaluation
- TD MatlabDocument5 pagesTD MatlabMbarka AadiPas encore d'évaluation
- Esa Examen Analyse Numerique GC SUPER STACO 2019 2020Document2 pagesEsa Examen Analyse Numerique GC SUPER STACO 2019 2020CRUZ FXPas encore d'évaluation
- GMM Devoir - Mstat - 2020 2021Document3 pagesGMM Devoir - Mstat - 2020 2021Mano AgbodoPas encore d'évaluation
- td4 Proba 11 12Document5 pagestd4 Proba 11 12fille120507Pas encore d'évaluation
- TD2 EccDocument2 pagesTD2 EcclayeSekou KabaPas encore d'évaluation
- Série 2 Et SolutionDocument7 pagesSérie 2 Et Solutionayoub benaliPas encore d'évaluation
- Exoscolle - Inconnu (E)Document3 pagesExoscolle - Inconnu (E)Shanito Not'onbut'offPas encore d'évaluation
- Chapitre 1Document24 pagesChapitre 1OUSSAMA ELBAHARPas encore d'évaluation
- Cours 2Document9 pagesCours 2Zak BelPas encore d'évaluation
- 07 - Reduction D Endomorphismes Corriges ClassiquesDocument8 pages07 - Reduction D Endomorphismes Corriges ClassiquesAIMAD ESSAKHIPas encore d'évaluation
- Cours 3 BDocument49 pagesCours 3 BJean HovozounkouPas encore d'évaluation
- CHAPITRE 2 - Loi DiscreteDocument10 pagesCHAPITRE 2 - Loi Discreteayumihyesu2Pas encore d'évaluation
- TD3 PDFDocument4 pagesTD3 PDFMay SsenPas encore d'évaluation
- 1.4. Exercice FormatifDocument6 pages1.4. Exercice FormatifSebastián IsaíasPas encore d'évaluation
- Partiel MLG 17-18Document7 pagesPartiel MLG 17-18Farouk MhamdiPas encore d'évaluation
- EDO Lin EairesDocument2 pagesEDO Lin EairesKlyrdeePas encore d'évaluation
- Exercices an numDocument10 pagesExercices an numbennaysanae6Pas encore d'évaluation
- AL7MA04TEPA0013 Sequence 04 PDFDocument41 pagesAL7MA04TEPA0013 Sequence 04 PDFPepePas encore d'évaluation
- TD2 ECC CorrectionDocument5 pagesTD2 ECC CorrectionSalma YousfiPas encore d'évaluation
- UTC6041920Document2 pagesUTC6041920nour1960Pas encore d'évaluation
- MathDocument8 pagesMathalaskaPas encore d'évaluation
- Serie 3 Analyse 2Document5 pagesSerie 3 Analyse 2Group 7 PFE100% (1)
- Serie 3Document2 pagesSerie 3Youssef AMirounePas encore d'évaluation
- 17 Systemes Equations LineairesDocument4 pages17 Systemes Equations LineairesdeltafossoPas encore d'évaluation
- $2012 ESSEC E2 CorrigéDocument20 pages$2012 ESSEC E2 CorrigéClémentine BRUGUEROLLEPas encore d'évaluation
- Equations Differentielles Et StabiliteDocument8 pagesEquations Differentielles Et StabiliteTRANPas encore d'évaluation
- Corrige Topo3 PDFDocument13 pagesCorrige Topo3 PDFNantenainaTojoRakotondrafaraPas encore d'évaluation
- Partiel AmphiA 236 2023Document6 pagesPartiel AmphiA 236 2023Ibrahim CoulibalyPas encore d'évaluation
- TD2 ProbaDocument4 pagesTD2 ProbaPFAPas encore d'évaluation
- TD ProbabilitéDocument3 pagesTD ProbabilitéAboubacar sidik DaoPas encore d'évaluation
- PCSI5 Chapitre25Document16 pagesPCSI5 Chapitre25Ÿóüss Ęf ŸøūssêfPas encore d'évaluation
- TD Analyse NumériqueDocument19 pagesTD Analyse NumériqueWissal ElmouhiPas encore d'évaluation
- L1CalcMath 1314 TD5 CorrigeDocument6 pagesL1CalcMath 1314 TD5 CorrigeBrahim MouhcinePas encore d'évaluation
- Methodes NumériquesDocument3 pagesMethodes NumériquesKOUTOPas encore d'évaluation
- Exos 4Document3 pagesExos 4stevy darelPas encore d'évaluation
- Licence SME UE19 TD4 CorrectionDocument5 pagesLicence SME UE19 TD4 CorrectionqkdjzlzkjaPas encore d'évaluation
- 19droites SystemesMDocument6 pages19droites SystemesMRawan ZorkotPas encore d'évaluation
- Ex Form QDocument4 pagesEx Form QDoucet LeloPas encore d'évaluation
- DM Variables Aleatoires A Densite+inegalites PDFDocument1 pageDM Variables Aleatoires A Densite+inegalites PDFAbdellah MazighiPas encore d'évaluation
- Examen IFDocument2 pagesExamen IFSADOKPas encore d'évaluation
- Exam1 Géométrie DifférentielleDocument2 pagesExam1 Géométrie Différentielleayala stardicePas encore d'évaluation
- Mat RiceDocument17 pagesMat RiceIbra AdraouiPas encore d'évaluation
- TD2 Math 22022Document3 pagesTD2 Math 22022Hafsa SlamiPas encore d'évaluation
- Équations différentielles: Les Grands Articles d'UniversalisD'EverandÉquations différentielles: Les Grands Articles d'UniversalisPas encore d'évaluation
- Annales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésD'EverandAnnales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
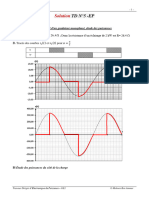
- Solution TD n5 EP GradateursDocument6 pagesSolution TD n5 EP Gradateurshnainia mohamed dhiaaPas encore d'évaluation
- Détermination Analytique Des Paramètres de Potier D'une Machine Synchrone Par La Méthode Des PentesDocument16 pagesDétermination Analytique Des Paramètres de Potier D'une Machine Synchrone Par La Méthode Des PentesbenkhelilmalikPas encore d'évaluation
- Crrection ExamenDocument7 pagesCrrection ExamenHØu ÇîNePas encore d'évaluation
- TP Tds SpiceDocument14 pagesTP Tds Spicehnainia mohamed dhiaaPas encore d'évaluation
- PH5 Oscillations Mécaniques LibresDocument17 pagesPH5 Oscillations Mécaniques LibresMouhamed Ali SahbaniPas encore d'évaluation
- Exercices Divers ISTS1Document16 pagesExercices Divers ISTS1abdelhamid djaloulPas encore d'évaluation
- Mini Projet de RéducteurDocument14 pagesMini Projet de RéducteurWissem OthmaniPas encore d'évaluation
- Chapitre V Calcul Aux E.LDocument22 pagesChapitre V Calcul Aux E.LMehdi DmPas encore d'évaluation
- Synthese RDMDocument7 pagesSynthese RDMfd_haslerPas encore d'évaluation
- Etude Du Planchers:: Figure III.1: Coupe Transversale Du Plancher. Les Charges Des PoutrellesDocument32 pagesEtude Du Planchers:: Figure III.1: Coupe Transversale Du Plancher. Les Charges Des PoutrellesdaoosPas encore d'évaluation
- TP 1: Incertitudes de MesureDocument6 pagesTP 1: Incertitudes de Mesuremmm aaPas encore d'évaluation
- 02 CHAPITRE 1 La Pollution HarmoniquesDocument6 pages02 CHAPITRE 1 La Pollution HarmoniquesYass561Pas encore d'évaluation
- Nombres ComplexespDocument14 pagesNombres ComplexespHouria DinariPas encore d'évaluation
- Chapitre - I ElectrotechniqueDocument56 pagesChapitre - I ElectrotechniqueMaroua SederPas encore d'évaluation
- U15 1662 Abbas 2013Document65 pagesU15 1662 Abbas 2013Abderrazzak ZOUANEPas encore d'évaluation
- Les Chemins de La ConnaissanceDocument124 pagesLes Chemins de La ConnaissancehemeraudePas encore d'évaluation
- Slides CoquesDocument149 pagesSlides CoquesPierre BPas encore d'évaluation
- TP1 Reflexion RefractionDocument3 pagesTP1 Reflexion Refractionfafoulol100% (1)
- Fiche Autorisation Travail XavierDocument1 pageFiche Autorisation Travail XavierMercelatPas encore d'évaluation
- Raideur Des Artic de La Main Rééducation Et AppareillageDocument57 pagesRaideur Des Artic de La Main Rééducation Et AppareillageHasnaaPas encore d'évaluation
- Rappel Semi-Conducteur Et Jonction PNDocument6 pagesRappel Semi-Conducteur Et Jonction PNAicha ZEBIRI100% (1)
- Cours Cinétique Enzymatique. 21docxDocument7 pagesCours Cinétique Enzymatique. 21docxKEBIR ZAHRAPas encore d'évaluation
- La Généralité Sur La Compensation de Puissance RéactiveDocument24 pagesLa Généralité Sur La Compensation de Puissance RéactiveChakib ZendaguiPas encore d'évaluation
- Rapport BCH211 N°2,2023 - 055457Document9 pagesRapport BCH211 N°2,2023 - 055457itchamgbabikPas encore d'évaluation
- IPhO LANDRAUD Cours Electricité Partie 1 IPHO 2018Document28 pagesIPhO LANDRAUD Cours Electricité Partie 1 IPHO 2018Yassine RiahiPas encore d'évaluation
- Applications Linéaires (3 - 4) - Exercices Corrigés - MathprepaDocument6 pagesApplications Linéaires (3 - 4) - Exercices Corrigés - Mathprepazakaria amirPas encore d'évaluation
- FP - Ingelec - Luminaires - Led - Projecteurs Soltek - VaDocument5 pagesFP - Ingelec - Luminaires - Led - Projecteurs Soltek - VaYoussef AcherquiPas encore d'évaluation
- Chapitre 4Document9 pagesChapitre 4Al Amin BelloPas encore d'évaluation
- 1 e Dictionnaire 2Document3 pages1 e Dictionnaire 2hend boussaadaPas encore d'évaluation
- l2 Geomorphologie 2014 - 2015Document94 pagesl2 Geomorphologie 2014 - 2015BTI YokotaPas encore d'évaluation
- DC3 4ScT (09-10)Document9 pagesDC3 4ScT (09-10)Wagih MrassiPas encore d'évaluation
- A01Document2 pagesA01ABDERRAHMANE DERMOUNPas encore d'évaluation
- Hecht-PhysiqueDocument30 pagesHecht-PhysiqueadrienscaleaPas encore d'évaluation
- X2018 TelescopeDeFéryDocument8 pagesX2018 TelescopeDeFéryAbdellah BouhanikPas encore d'évaluation