Vous aimerez peut-être aussi
- Ab Al-Ksim Ibn Sadrah. Grammaire D'arabe Régulier, Morphologie, Syntaxe, Metrique. 1898.Document548 pagesAb Al-Ksim Ibn Sadrah. Grammaire D'arabe Régulier, Morphologie, Syntaxe, Metrique. 1898.Patrologia Latina, Graeca et Orientalis100% (1)
- Traité d'économétrie financière: Modélisation financièreD'EverandTraité d'économétrie financière: Modélisation financièrePas encore d'évaluation
- Les macros avec OpenOffice CALC: La programmation BASIC pour tousD'EverandLes macros avec OpenOffice CALC: La programmation BASIC pour tousPas encore d'évaluation
- Exercices Audit General Fsjes 19 20 PDFDocument6 pagesExercices Audit General Fsjes 19 20 PDFroudaniPas encore d'évaluation
- Rapport Mini Projet PersonnaliséDocument17 pagesRapport Mini Projet PersonnaliséSaf Bes100% (7)
- AutomatesDocument36 pagesAutomatesomariosoft100% (3)
- Cours Step 7 Siemens 60 PagesDocument60 pagesCours Step 7 Siemens 60 Pagesعماد الدين الغريبPas encore d'évaluation
- Porte Metallique Techniques Catalogue PDFDocument210 pagesPorte Metallique Techniques Catalogue PDFClay Rios100% (1)
- L Automate Programmable Industriel 1Document18 pagesL Automate Programmable Industriel 1soufyan100% (2)
- TP3 RipDocument3 pagesTP3 RipabdelraoufPas encore d'évaluation
- Feuille D'exercices Sur Le Chapitre 2Document3 pagesFeuille D'exercices Sur Le Chapitre 2Ilyes OunnediPas encore d'évaluation
- TD GNS3 RouteursDocument13 pagesTD GNS3 RouteursOtia Oba0% (1)
- Aide TP Switch Cisco 2950Document18 pagesAide TP Switch Cisco 2950Rémi AdamPas encore d'évaluation
- Mise en Oeuvre de La Liaison CanOpen Entre Un M241 Et Un Variateur Lexium 32 Avec Les Registres CMD ETA EtcDocument14 pagesMise en Oeuvre de La Liaison CanOpen Entre Un M241 Et Un Variateur Lexium 32 Avec Les Registres CMD ETA Etcdenix49100% (1)
- Liaison CanOpen Entre Un M340 Et Un Variateur ATV32 Avec Utilisation Des MFBs V1Document14 pagesLiaison CanOpen Entre Un M340 Et Un Variateur ATV32 Avec Utilisation Des MFBs V1kernaniPas encore d'évaluation
- Presentation Automate ProgrammableDocument21 pagesPresentation Automate ProgrammableAmine100% (1)
- Présentation Détaillée Formation of VTIDocument4 pagesPrésentation Détaillée Formation of VTILeila BahriPas encore d'évaluation
- 2.1.4.9 Lab - Establishing A Console Session With Tera Term PDFDocument11 pages2.1.4.9 Lab - Establishing A Console Session With Tera Term PDFkonan franckPas encore d'évaluation
- 890 Exploiter Canopen m340Document31 pages890 Exploiter Canopen m340Thierry LAMBOTTEPas encore d'évaluation
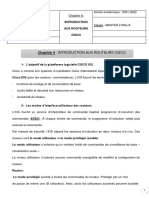
- Chapitre 4 - Introduction Aux Routeurs CISCODocument5 pagesChapitre 4 - Introduction Aux Routeurs CISCODrissa Michael CoulibalyPas encore d'évaluation
- Partie 1Document6 pagesPartie 1A.HoussainPas encore d'évaluation
- Liaison CanOpen Entre Un M340 Et Un Variateur ATV32 Avec Utilisation Des MFBs V1Document14 pagesLiaison CanOpen Entre Un M340 Et Un Variateur ATV32 Avec Utilisation Des MFBs V1Nabil Annaba100% (1)
- 10.3.1.11 Lab - Configure and Verify Password Recovery PDFDocument5 pages10.3.1.11 Lab - Configure and Verify Password Recovery PDFBrahim HAMDIPas encore d'évaluation
- TP Ensa07Document14 pagesTP Ensa07The geek CuestaPas encore d'évaluation
- TP UpDocument14 pagesTP UpJunior Yoann NzangPas encore d'évaluation
- RoboDK Doc FR Robots FanucDocument12 pagesRoboDK Doc FR Robots FanucMbaye DiengPas encore d'évaluation
- 2.1.4.7 Lab - Establishing A Console Session With Tera TermDocument11 pages2.1.4.7 Lab - Establishing A Console Session With Tera Termaicha Guefrachi100% (1)
- UCenter RTK GuideDocument27 pagesUCenter RTK GuideGui CarmaxPas encore d'évaluation
- Exolab - Decouverte Routage CiscoDocument11 pagesExolab - Decouverte Routage CiscococyoPas encore d'évaluation
- 2.3.8 Lab - Navigate The Ios by Using Tera Term For Console Connectivity - FR FRDocument9 pages2.3.8 Lab - Navigate The Ios by Using Tera Term For Console Connectivity - FR FRamalou warda0% (1)
- VM260FRDocument67 pagesVM260FRPatrick NgwangPas encore d'évaluation
- Self-Study Installation For SMB - Edition 07 DT00CTE100Document72 pagesSelf-Study Installation For SMB - Edition 07 DT00CTE100MalikBoussettaPas encore d'évaluation
- Arduino Uno SchematicDocument5 pagesArduino Uno SchematicTabet KhPas encore d'évaluation
- Formation Interface Communication 30Document50 pagesFormation Interface Communication 30kader boudiPas encore d'évaluation
- Unité4 TPDocument5 pagesUnité4 TPAzzeddine EL-OhnPas encore d'évaluation
- Fiche Technique Variateur: SommaireDocument33 pagesFiche Technique Variateur: SommaireMahdjoub araibiPas encore d'évaluation
- MTELecoGO CONF FRDocument125 pagesMTELecoGO CONF FRRabcap BhzPas encore d'évaluation
- Chapitre 9 - Concept Basic SWITCH & ConfigurationDocument47 pagesChapitre 9 - Concept Basic SWITCH & ConfigurationOmar BiteyePas encore d'évaluation
- RL TP3Document9 pagesRL TP3SALMA GUESMIPas encore d'évaluation
- ESwitching Lab 5 5 1Document10 pagesESwitching Lab 5 5 1yanisPas encore d'évaluation
- Compte Rendu TP3 DIOMEDocument16 pagesCompte Rendu TP3 DIOMELandry NayirePas encore d'évaluation
- Examin Partie 14 Ccna2 FRDocument50 pagesExamin Partie 14 Ccna2 FRRiadh SalhiPas encore d'évaluation
- Programmer Sous Unity Pro API Modicon M340Document29 pagesProgrammer Sous Unity Pro API Modicon M340Sabah LoumitiPas encore d'évaluation
- 72Document18 pages72MALLOUK .MOUTAOUAKILPas encore d'évaluation
- NT00188 FR 06Document63 pagesNT00188 FR 06BOUCHTAOUI IlyassPas encore d'évaluation
- Port Miroring Avec Switch CiscoDocument3 pagesPort Miroring Avec Switch CiscoKouman BasilePas encore d'évaluation
- TP7 Switching 2021 LSDDocument2 pagesTP7 Switching 2021 LSDAnass BoutslighoiPas encore d'évaluation
- TP FR OspfDocument16 pagesTP FR OspfidimarboyPas encore d'évaluation
- Enonce TP2Document4 pagesEnonce TP2Leo GuedPas encore d'évaluation
- Guide FlowcodeDocument13 pagesGuide FlowcodebellalPas encore d'évaluation
- DS2016Document6 pagesDS2016Heythem DhaouadiPas encore d'évaluation
- Cisco Netacad SRWE Version 7 FRDocument53 pagesCisco Netacad SRWE Version 7 FRRiadh SalhiPas encore d'évaluation
- Liaison CanOpen Entre Un M241 Et Un Variateur ATV32 Avec Modules FonctionnelsDocument15 pagesLiaison CanOpen Entre Un M241 Et Un Variateur ATV32 Avec Modules Fonctionnelsaldo peñaPas encore d'évaluation
- Examen TP CiscoDocument17 pagesExamen TP Ciscodream0231Pas encore d'évaluation
- ApiDocument8 pagesApiochwaiaPas encore d'évaluation
- TP 2020 Part2Document16 pagesTP 2020 Part2Ben IbrahimPas encore d'évaluation
- 892 Programmer Sous Unity m340Document29 pages892 Programmer Sous Unity m340Med GuerPas encore d'évaluation
- Documentation Routeur Cisco 2008Document15 pagesDocumentation Routeur Cisco 2008glabsounet100% (1)
- Projet Fin Formation gns3pdf PDF FreeDocument32 pagesProjet Fin Formation gns3pdf PDF Freeboughabdellah2066Pas encore d'évaluation
- Python pour Débutants : Guide Complet pour Apprendre la Programmation Pas à PasD'EverandPython pour Débutants : Guide Complet pour Apprendre la Programmation Pas à PasPas encore d'évaluation
- Zootechnie - SP - Ciale - Docx Filename - UTF-8''zootechnie SpécialeDocument52 pagesZootechnie - SP - Ciale - Docx Filename - UTF-8''zootechnie SpécialeAhmed MessabihPas encore d'évaluation
- Magoe Cours Electrotech 2015Document53 pagesMagoe Cours Electrotech 2015mykherinossaoromouPas encore d'évaluation
- Moteur CCDocument10 pagesMoteur CCMohamed MouchrifPas encore d'évaluation
- Cycle de Vie Dune VoitureDocument75 pagesCycle de Vie Dune VoitureIheb BelhsanPas encore d'évaluation
- Autocad Structure 2011 PDFDocument1 pageAutocad Structure 2011 PDFAlseni SoumahPas encore d'évaluation
- 1990 - Jeammaud A. - La Règle de Droit Comme Modèle PDFDocument18 pages1990 - Jeammaud A. - La Règle de Droit Comme Modèle PDFGuyMoquette100% (1)
- Sujet Principal - BTS - BAT - 2017Document2 pagesSujet Principal - BTS - BAT - 2017Hasnae Ben khaldounPas encore d'évaluation
- Monétique CamiDocument6 pagesMonétique CamiCam EliaPas encore d'évaluation
- Fiche Prevention No3 - PapDocument5 pagesFiche Prevention No3 - Papjordi puigPas encore d'évaluation
- Oeuvres de Napoléon Bonaparte IV-VDocument35 pagesOeuvres de Napoléon Bonaparte IV-VRaúl Ignacio GaraycocheaPas encore d'évaluation
- Cours - Math Etude de Fonction - Bac Toutes Sections (2013-2014) MR Khammour KhalilDocument2 pagesCours - Math Etude de Fonction - Bac Toutes Sections (2013-2014) MR Khammour KhalilibxxxPas encore d'évaluation
- Cours 1 Anapath - Mode de CompatibilitéDocument46 pagesCours 1 Anapath - Mode de Compatibilitémanalyoubi00Pas encore d'évaluation
- DS PV3543 FR FR 76436Document6 pagesDS PV3543 FR FR 76436Sabi BORDJIHANEPas encore d'évaluation
- Les Idées Qu'exprime La Nourrice en Ce Qui Concerne Les FillesDocument2 pagesLes Idées Qu'exprime La Nourrice en Ce Qui Concerne Les FillesSouhaila Nagib100% (2)
- Toussaint Cahier de Vacances Gratuit GS MaternelleDocument13 pagesToussaint Cahier de Vacances Gratuit GS Maternelleroums65Pas encore d'évaluation
- 1981 Rahan (Divers) - Bibliothèque de Travail (BT) : Naissance D'une Bande Dessinée: RahanDocument2 pages1981 Rahan (Divers) - Bibliothèque de Travail (BT) : Naissance D'une Bande Dessinée: RahanFrédéric GonetPas encore d'évaluation
- Rapport Final PER Volume1 - Octobre 2009Document166 pagesRapport Final PER Volume1 - Octobre 2009Arnaud RAOUMBAPas encore d'évaluation
- Dcnum Ouvrir ProgDocument2 pagesDcnum Ouvrir Progapi-489017636Pas encore d'évaluation
- Introduction Aux AlgorigrammesDocument37 pagesIntroduction Aux AlgorigrammesIsabelle54Pas encore d'évaluation
- Carte TassinDocument8 pagesCarte TassinAntoukanhotmail.frPas encore d'évaluation
- Ethique Et Deontologie ProfessionnelleDocument6 pagesEthique Et Deontologie ProfessionnelleEmmanuel BombulaPas encore d'évaluation
- Séance 3-Jeu Let's BioDocument4 pagesSéance 3-Jeu Let's BioYosr charekPas encore d'évaluation
- 5 EpDocument3 pages5 Epfaris aliPas encore d'évaluation
- TdcisailDocument1 pageTdcisailMohamedBejjaPas encore d'évaluation
- 25 Objectifs Per Ted Gunderson PDFDocument12 pages25 Objectifs Per Ted Gunderson PDFFabrice BectPas encore d'évaluation
- Biochimie-Révélateurs SynthèseDocument18 pagesBiochimie-Révélateurs SynthèseAntonios MpasinasPas encore d'évaluation