Vous aimerez peut-être aussi
- Syst EquaDocument13 pagesSyst EquaNaila HananePas encore d'évaluation
- Systèmes LinéairesDocument16 pagesSystèmes Linéaireska.Pas encore d'évaluation
- Bibmath AlgebreDocument5 pagesBibmath AlgebreLY SENGHUO100% (1)
- Systemes LineairesDocument4 pagesSystemes LineairesseriannyPas encore d'évaluation
- Systeme LineaireDocument10 pagesSysteme LineaireMeryem SlimPas encore d'évaluation
- Déterminant D'un MatriceDocument3 pagesDéterminant D'un MatricesaaniPas encore d'évaluation
- Chap1 Diallo AlgebreDocument8 pagesChap1 Diallo Algebrebassiroudabo370Pas encore d'évaluation
- BCGDocument6 pagesBCGLawrd RrafiePas encore d'évaluation
- Chapitre 2 Systèmes D'équations LinéairesDocument7 pagesChapitre 2 Systèmes D'équations LinéairesGhandour Sana100% (1)
- Syslinch2Document24 pagesSyslinch2imranelalami1Pas encore d'évaluation
- Systeme LineaireDocument64 pagesSysteme LineaireSmaïl DarbanePas encore d'évaluation
- 8-Résolution de Systèmes LinéairesDocument16 pages8-Résolution de Systèmes LinéairesRachid MounirPas encore d'évaluation
- Chapitre 9 Equation Droite Systeme EquationsDocument9 pagesChapitre 9 Equation Droite Systeme EquationsLouis DefunesiPas encore d'évaluation
- Chap 2Document20 pagesChap 2karimPas encore d'évaluation
- MC6 SystlnDocument8 pagesMC6 SystlnTeddy RavatsyPas encore d'évaluation
- Chapitre III.l2.h.moussaDocument17 pagesChapitre III.l2.h.moussaSylvain DidyPas encore d'évaluation
- CH3 Eq LinDocument17 pagesCH3 Eq LinceczczcPas encore d'évaluation
- 06 Petits Systemes Lineaires ChapitreDocument6 pages06 Petits Systemes Lineaires ChapitreOussama McPas encore d'évaluation
- Resume SystemesDocument2 pagesResume SystemesMeriem AabidPas encore d'évaluation
- TLM1 Pivot de GaussDocument10 pagesTLM1 Pivot de Gausssoumia100% (1)
- TD NumDocument14 pagesTD NumSFatima-EzzahraPas encore d'évaluation
- Matrices 1 IntroductionDocument7 pagesMatrices 1 IntroductionAnahi MaâroufPas encore d'évaluation
- TP Analyse Numerique PDFDocument21 pagesTP Analyse Numerique PDFEl Hassane El MchichiPas encore d'évaluation
- Beamer SystèmeDocument36 pagesBeamer SystèmeDavidPas encore d'évaluation
- Systeme Lineaire (Methode de Gauss) PDFDocument8 pagesSysteme Lineaire (Methode de Gauss) PDFFao DPas encore d'évaluation
- Chapitre1-Systèmes LinéairesDocument26 pagesChapitre1-Systèmes LinéairesIlyas FaqirPas encore d'évaluation
- Chapitre 4_Systèmes d’équations linéairesDocument9 pagesChapitre 4_Systèmes d’équations linéairesArij ChouchenePas encore d'évaluation
- MAT16003Document19 pagesMAT16003A LZPas encore d'évaluation
- Chapitre 5-Syst-Eq-AlgDocument25 pagesChapitre 5-Syst-Eq-AlgZàhira ZahiraPas encore d'évaluation
- Systemes de Deux Equations A Deux InconnuesDocument16 pagesSystemes de Deux Equations A Deux InconnueszlimitounePas encore d'évaluation
- An ch2Document37 pagesAn ch2gabinleePas encore d'évaluation
- CH SyslinDocument10 pagesCH Syslinmohamed Amine TiferninePas encore d'évaluation
- Systeme LineaireDocument26 pagesSysteme Lineaireemile loviPas encore d'évaluation
- 4-Chapitre IVDocument7 pages4-Chapitre IVElogri AdnanePas encore d'évaluation
- TP 3025Document11 pagesTP 3025ALFRED FOKOUNG DOUOPas encore d'évaluation
- Algorithme Gauss/JordanDocument3 pagesAlgorithme Gauss/JordanAmine Rem'sPas encore d'évaluation
- Chapitre 1 - Analyse Numérique - 2023-2024Document13 pagesChapitre 1 - Analyse Numérique - 2023-2024chihabhamaz19Pas encore d'évaluation
- CH SyslinDocument10 pagesCH SyslinAbdou YahiPas encore d'évaluation
- Iedf Cours TQ Semestre1 MatricesDocument13 pagesIedf Cours TQ Semestre1 MatricesAltafallah MissaouiPas encore d'évaluation
- Chap 12 SystemesDocument6 pagesChap 12 SystemesJohan FaberPas encore d'évaluation
- CHP 5Document26 pagesCHP 5othmane hanaPas encore d'évaluation
- Chapitre 2Document106 pagesChapitre 2bezaPas encore d'évaluation
- Systeme EquationsDocument14 pagesSysteme EquationsBulaPas encore d'évaluation
- Méthodes NumériquesDocument76 pagesMéthodes Numériquesأبو كعب علاء الدينPas encore d'évaluation
- Index - 2024-01-11T204650.395Document7 pagesIndex - 2024-01-11T204650.395Yaniss RadiPas encore d'évaluation
- Maths2 RangDocument7 pagesMaths2 RangMustapha Berami100% (1)
- TP1 2019Document2 pagesTP1 2019Yanis DiabloPas encore d'évaluation
- TD4 Séance.1.Document4 pagesTD4 Séance.1.Badre OuzougarPas encore d'évaluation
- CH SyslinDocument10 pagesCH SyslinYounes JaaidaniPas encore d'évaluation
- Fiche Cours Skema EquationsDocument8 pagesFiche Cours Skema EquationsDidier SixquartPas encore d'évaluation
- TP1Document2 pagesTP1Angèle BoudaPas encore d'évaluation
- Systemes Resume de Cours 1Document1 pageSystemes Resume de Cours 1YassminePas encore d'évaluation
- Seriessysteme LineaireDocument3 pagesSeriessysteme LineaireAmina ChelloumPas encore d'évaluation
- Math 1 Et 2Document13 pagesMath 1 Et 2oslomalumaPas encore d'évaluation
- Systèmes LinéairesDocument5 pagesSystèmes LinéairescosinusPas encore d'évaluation
- Chapitre 3 (Partie III) - Systemes Linéaires D'équations LinéairesDocument10 pagesChapitre 3 (Partie III) - Systemes Linéaires D'équations Linéairesmoh koubaPas encore d'évaluation
- Algébre-S1 - Systéme D'équation LinéaireDocument28 pagesAlgébre-S1 - Systéme D'équation LinéaireKamelia BedadPas encore d'évaluation
- Chapitre II PDFDocument12 pagesChapitre II PDFyounesrguigPas encore d'évaluation
- Chap2 Systemes LineairesDocument18 pagesChap2 Systemes LineairesHouda GharrabouPas encore d'évaluation
- Cours GOE Master I SIADDocument29 pagesCours GOE Master I SIADhossein kouahiPas encore d'évaluation
- EDT-FCA de La Semaine Du 10 JuilletDocument2 pagesEDT-FCA de La Semaine Du 10 Juillethossein kouahiPas encore d'évaluation
- Rapport Final Corrigé-1Document57 pagesRapport Final Corrigé-1hossein kouahiPas encore d'évaluation
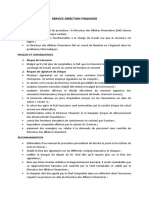
- Service Direction FinancierDocument2 pagesService Direction Financierhossein kouahiPas encore d'évaluation
- Powerpoint AndréaDocument19 pagesPowerpoint Andréahossein kouahiPas encore d'évaluation
- Power Point KINI SABINEDocument22 pagesPower Point KINI SABINEhossein kouahiPas encore d'évaluation
- Devoir cas pratique Droit pénal des affaires Diarra Sary ChristianDocument3 pagesDevoir cas pratique Droit pénal des affaires Diarra Sary Christianhossein kouahiPas encore d'évaluation
- Prevalence Et Evolution de La DengueDocument9 pagesPrevalence Et Evolution de La Denguehossein kouahiPas encore d'évaluation
- Karaté Pour TousDocument5 pagesKaraté Pour Toushossein kouahiPas encore d'évaluation
- Déclaration Droits Homme - SimplifDocument2 pagesDéclaration Droits Homme - Simplifhossein kouahiPas encore d'évaluation
- Fiche Méthode 4: Comment Organiser Mon Travail Personnel ?Document3 pagesFiche Méthode 4: Comment Organiser Mon Travail Personnel ?hossein kouahiPas encore d'évaluation
- Site Otmani1981 Histoire-Des-OrdinateurDocument9 pagesSite Otmani1981 Histoire-Des-Ordinateurhossein kouahiPas encore d'évaluation
- La Charte de Kuruka FugaDocument6 pagesLa Charte de Kuruka Fugahossein kouahiPas encore d'évaluation
- Chapitre 2 Formation ESE PDFDocument4 pagesChapitre 2 Formation ESE PDFhossein kouahiPas encore d'évaluation
- Gestionnaire Des Ressources Humaines PDFDocument3 pagesGestionnaire Des Ressources Humaines PDFhossein kouahiPas encore d'évaluation
- TD Serie 1 Des Effet de Commerce (Exercice Corrigé Avec Rappel Du CoursDocument10 pagesTD Serie 1 Des Effet de Commerce (Exercice Corrigé Avec Rappel Du Courshossein kouahiPas encore d'évaluation
- Livret - Mets - Nationaux - Cuisine BurkinabèDocument60 pagesLivret - Mets - Nationaux - Cuisine Burkinabèhossein kouahi100% (1)
- Livret Recette Secret SpicesDocument16 pagesLivret Recette Secret Spiceshossein kouahiPas encore d'évaluation
- Ngani Kouahi Hossein Martin: ProfilDocument1 pageNgani Kouahi Hossein Martin: Profilhossein kouahiPas encore d'évaluation
- Cours à - Ducation Aux Valeurs - Chap 1 - ISMTDocument20 pagesCours à - Ducation Aux Valeurs - Chap 1 - ISMThossein kouahiPas encore d'évaluation
- Module 2 Vendre La PratiqueDocument17 pagesModule 2 Vendre La Pratiquehossein kouahiPas encore d'évaluation
- Expose 4 Plantes Medecinales-3Document84 pagesExpose 4 Plantes Medecinales-3hossein kouahiPas encore d'évaluation
- Cuisine BurkinabèDocument97 pagesCuisine Burkinabèhossein kouahiPas encore d'évaluation
- Lettre de MotivationDocument1 pageLettre de Motivationhossein kouahiPas encore d'évaluation
- Initiations Ngunza V1Document6 pagesInitiations Ngunza V1hossein kouahiPas encore d'évaluation
- Escat - Emplois Du Temps - S1 - 2021 - 2022Document13 pagesEscat - Emplois Du Temps - S1 - 2021 - 2022hossein kouahiPas encore d'évaluation
- Carte de Noël 2Document1 pageCarte de Noël 2hossein kouahiPas encore d'évaluation
- Fiche Technico-Economique Canne A Sucre Dosso Juin2017Document3 pagesFiche Technico-Economique Canne A Sucre Dosso Juin2017hossein kouahi100% (1)
- 2006 Cog NgunzismeDocument5 pages2006 Cog Ngunzismehossein kouahiPas encore d'évaluation
- Cours EqDiffDocument7 pagesCours EqDiffsteve kamguiaPas encore d'évaluation
- Programme Maths2 Pour Les Premières Année LMDDocument41 pagesProgramme Maths2 Pour Les Premières Année LMDHINDPas encore d'évaluation
- SommaireDocument24 pagesSommairesabir abdelilahPas encore d'évaluation
- Exercices Et Corrigés de CdI-2Document151 pagesExercices Et Corrigés de CdI-2romy94496Pas encore d'évaluation
- Les Systèmes D'équations LinéairesDocument12 pagesLes Systèmes D'équations LinéairesTatiana NaranjoPas encore d'évaluation
- Exo Equations Diff É Rent I EllesDocument5 pagesExo Equations Diff É Rent I EllesNy Fahendrena IhanyPas encore d'évaluation
- Algèbre Linéaire Et Géométrie Vectorielle - Plan de CoursDocument11 pagesAlgèbre Linéaire Et Géométrie Vectorielle - Plan de CourschloePas encore d'évaluation
- 1.support de Cours L2-Équations Différentielles Et Intégrales - BisDocument36 pages1.support de Cours L2-Équations Différentielles Et Intégrales - BisGuillaume KOUASSIPas encore d'évaluation
- Piskunov - Calcul Differéntiel Et Intégral - Tome 2 - MirDocument616 pagesPiskunov - Calcul Differéntiel Et Intégral - Tome 2 - MirABDELKADER GUENAIZI100% (1)
- Chapitre 26Document19 pagesChapitre 26Shakespeare Rahma100% (1)
- Exercices Corrigés Sur Les Équations Différentielles: Pierre-Jean HormièreDocument84 pagesExercices Corrigés Sur Les Équations Différentielles: Pierre-Jean Hormièresout françoisPas encore d'évaluation
- EquationDocument5 pagesEquationhassna ait aliPas encore d'évaluation
- Chapitre 1Document13 pagesChapitre 1Nassim MillanoPas encore d'évaluation
- Algorithmes de Calcul Formel Et Numérique PDFDocument408 pagesAlgorithmes de Calcul Formel Et Numérique PDFTheodore KOUTCHANOUPas encore d'évaluation
- 01 EzDocument31 pages01 EzOutmane FdtPas encore d'évaluation