Vous aimerez peut-être aussi
- Sujet C6Document39 pagesSujet C6Md AhmedPas encore d'évaluation
- Présentation Architecture MultiplexéeDocument17 pagesPrésentation Architecture Multiplexéeali_amrani_1Pas encore d'évaluation
- TD Mase531 Version EtudiantDocument14 pagesTD Mase531 Version EtudiantDahPas encore d'évaluation
- 7-1-18 COURS CORRIGE Initiation Au MultiplexageDocument11 pages7-1-18 COURS CORRIGE Initiation Au Multiplexageclaude ROYPas encore d'évaluation
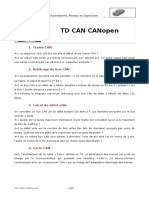
- TD Can Canopen 2011Document12 pagesTD Can Canopen 2011Anas BlalPas encore d'évaluation
- Le Bus CANDocument21 pagesLe Bus CANMartinezPas encore d'évaluation
- L Architecture MultiplexeDocument6 pagesL Architecture Multiplexeanass sbniPas encore d'évaluation
- Bus-CANDocument9 pagesBus-CANReda ChofiPas encore d'évaluation
- CAN Support Cours 3GEDocument6 pagesCAN Support Cours 3GEAdil EL AttarPas encore d'évaluation
- Cours Bus CANDocument38 pagesCours Bus CANWarpynew C.L.APas encore d'évaluation
- Diapo PFEDocument55 pagesDiapo PFEKhadija Lakhdiri100% (2)
- TP1 Bus CAN-2Document7 pagesTP1 Bus CAN-2samsoum1Pas encore d'évaluation
- Info IndustrielDocument79 pagesInfo Industrielhoussin unusPas encore d'évaluation
- 9296 Tp7com Bus Cansujet PDFDocument2 pages9296 Tp7com Bus Cansujet PDFfatihaPas encore d'évaluation
- Bus CANDocument8 pagesBus CANAhmed Arrouj100% (2)
- Cours Systèmes Embarqués - Le Bus CANDocument1 pageCours Systèmes Embarqués - Le Bus CANSamira cherifPas encore d'évaluation
- Chapitre - 2 - Le Bus CANDocument59 pagesChapitre - 2 - Le Bus CANsid ali saidjPas encore d'évaluation
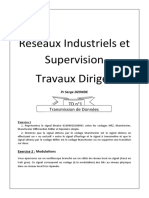
- Réseaux Industriels Et Supervision Travaux Dirigés: Transmission de DonnéesDocument8 pagesRéseaux Industriels Et Supervision Travaux Dirigés: Transmission de DonnéesNdolo KamerPas encore d'évaluation
- Bus CANDocument9 pagesBus CANato ndongo fabricePas encore d'évaluation
- PrésentationfinaleDocument101 pagesPrésentationfinalesarah bejaouiPas encore d'évaluation
- 1 BusCAN TrameDocument16 pages1 BusCAN Trameabdousewager100% (1)
- Seminaire Bus-Industriel CANDocument98 pagesSeminaire Bus-Industriel CANChafik BouguezourPas encore d'évaluation
- Mux 4Document10 pagesMux 4CintiaGonçalvesPas encore d'évaluation
- Chapitre 2 Le Bus CANDocument59 pagesChapitre 2 Le Bus CANbrezzy miraPas encore d'évaluation
- TP2 Bus CanDocument12 pagesTP2 Bus Cansamsoum1100% (1)
- Bus CanDocument50 pagesBus CanbabersonPas encore d'évaluation
- Le MultiplexageDocument12 pagesLe MultiplexageTSCHANNPas encore d'évaluation
- TD1 - Etude Du Bus CANDocument6 pagesTD1 - Etude Du Bus CANbbaaziz200550% (2)
- 7150 F Techniques de CommunicationDocument42 pages7150 F Techniques de CommunicationAchraf elouerghiPas encore d'évaluation
- Bsi PDFDocument98 pagesBsi PDFwidespirit50% (2)
- Mux PDFDocument9 pagesMux PDFkalombo100% (1)
- Gestion de L'information Par Bus-CanDocument17 pagesGestion de L'information Par Bus-Cankalico67Pas encore d'évaluation
- Iste DE FiguresDocument13 pagesIste DE FiguresYoussef AitbenaliPas encore d'évaluation
- Archimat 2Document68 pagesArchimat 2Hichem HamdiPas encore d'évaluation
- Bus-CAN FDocument9 pagesBus-CAN FAziz BouzainePas encore d'évaluation
- Cours - API Et Programmation L3 AutoDocument17 pagesCours - API Et Programmation L3 AutoimenenouvellePas encore d'évaluation
- Le Bus CANDocument17 pagesLe Bus CANInspec TricePas encore d'évaluation
- Bus de Communication Et Réseaux Industriels: Chapitre 2: AS-i Actuator & Sensor InterfaceDocument22 pagesBus de Communication Et Réseaux Industriels: Chapitre 2: AS-i Actuator & Sensor InterfaceZeghdoud raounekPas encore d'évaluation
- Bus CanDocument21 pagesBus CanSCORSAM1Pas encore d'évaluation
- Cours Bus CANDocument30 pagesCours Bus CANnawzat100% (1)
- Bus CAN (Controller Area Network)Document22 pagesBus CAN (Controller Area Network)Youcef Bch100% (1)
- Can BusDocument18 pagesCan BusEssaid AjanaPas encore d'évaluation
- SommaireDocument14 pagesSommaireMohamed DahiPas encore d'évaluation
- Gino Aka Akamas2.0 - FRDocument6 pagesGino Aka Akamas2.0 - FRharratmoussa6Pas encore d'évaluation
- Document de Formation Sans Mise A Jour Consultez Le Manuel de ReparationDocument24 pagesDocument de Formation Sans Mise A Jour Consultez Le Manuel de ReparationBORIS FIRMIN MOMENE DONGMOPas encore d'évaluation
- Chapitre 1 Généralités Sur Les Bus de TerrainDocument12 pagesChapitre 1 Généralités Sur Les Bus de TerrainMy Space100% (1)
- Exercices Rli 1Document9 pagesExercices Rli 1alex bbapPas encore d'évaluation
- Cours CANDocument32 pagesCours CANMarwen SellamiPas encore d'évaluation
- TP1 Can Oc2Document9 pagesTP1 Can Oc2samsoum1Pas encore d'évaluation
- Sujet Proposé 2 BTS ETDocument3 pagesSujet Proposé 2 BTS ETDimitry MabomPas encore d'évaluation
- Intro CAN Color PDFDocument42 pagesIntro CAN Color PDFKaddouri KaddaPas encore d'évaluation
- MUX Et BUS CANDocument34 pagesMUX Et BUS CANJoão Dantas100% (2)
- Res Can02Document25 pagesRes Can02fchgkgdhnPas encore d'évaluation
- Watteco FT 50-70-045 TICSO-v4Document2 pagesWatteco FT 50-70-045 TICSO-v4frederic.olkPas encore d'évaluation
- Reseaux IndustrielsDocument16 pagesReseaux IndustrielsAdil AbouelhassanPas encore d'évaluation
- TDu CDocument49 pagesTDu CnawzatPas encore d'évaluation
- 9100 Dossier Candidac BDHDocument23 pages9100 Dossier Candidac BDHato ndongo fabricePas encore d'évaluation
- Transformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiqueD'EverandTransformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiquePas encore d'évaluation
- Grille Intelligente: Échange d'électricité et d'informations entre les maisons et les centrales électriquesD'EverandGrille Intelligente: Échange d'électricité et d'informations entre les maisons et les centrales électriquesPas encore d'évaluation
- Batterie Lithium Fer Phosphate: Détrôner le lithium-ion dans les véhicules électriques, les mobiles et les ordinateurs portablesD'EverandBatterie Lithium Fer Phosphate: Détrôner le lithium-ion dans les véhicules électriques, les mobiles et les ordinateurs portablesPas encore d'évaluation
- ThéodoliteDocument5 pagesThéodoliteIchiban Iji100% (1)
- Chapitre II. Schémas Et Appareillage PDFDocument7 pagesChapitre II. Schémas Et Appareillage PDFfarouq habchiPas encore d'évaluation
- SSP 610 (Audi A3 '13 Réseau de Bord Et Multiplexage)Document44 pagesSSP 610 (Audi A3 '13 Réseau de Bord Et Multiplexage)ainginerPas encore d'évaluation
- Correction D.Rep GE DS3 MAI2022Document4 pagesCorrection D.Rep GE DS3 MAI2022Arfaoui Aymen100% (1)
- 1993-Pompe Peristaltique CorrigéDocument4 pages1993-Pompe Peristaltique CorrigéChabehouPas encore d'évaluation
- Soft Start Tempo DC Rev1Document2 pagesSoft Start Tempo DC Rev1Enos Marcos BastosPas encore d'évaluation
- Peugeot Alternateur Description Technique 11/65Document17 pagesPeugeot Alternateur Description Technique 11/65JulienPas encore d'évaluation
- Cantons ModelismeDocument27 pagesCantons Modelismeanon_417971952Pas encore d'évaluation
- Tsge Eff Corrige Var 2Document8 pagesTsge Eff Corrige Var 2addou100% (4)
- PspiceDocument8 pagesPspiceBounegab YoucefPas encore d'évaluation
- Manitou MRT 3255 (FR)Document8 pagesManitou MRT 3255 (FR)ManitouPas encore d'évaluation
- Electrodistributeur NoticeDocument1 pageElectrodistributeur NoticeCarlosPas encore d'évaluation
- Feuilletage (1) Obtenez Le Maximum Du Canon EOS 70DDocument25 pagesFeuilletage (1) Obtenez Le Maximum Du Canon EOS 70Dmohamed amidPas encore d'évaluation
- 6 Instrumentation Industrielle Transmetteur PDFDocument17 pages6 Instrumentation Industrielle Transmetteur PDFDODOHICHAMPas encore d'évaluation
- 13-Ayebi NourredineDocument64 pages13-Ayebi Nourredineoussama kherbouchePas encore d'évaluation
- TD RedressementDocument3 pagesTD RedressementCatherine Comme La VillePas encore d'évaluation
- MpegDocument33 pagesMpegTaoufiqDZNPas encore d'évaluation
- Secteur de Boot D'une Partition: OctetsDocument2 pagesSecteur de Boot D'une Partition: OctetsossoblkPas encore d'évaluation
- 0 - Etat Initial RAC-23-J61NPPXB06Document12 pages0 - Etat Initial RAC-23-J61NPPXB06yannic bouttierPas encore d'évaluation
- Bruits FerroviairesDocument10 pagesBruits FerroviairesAnonymous On47lKi100% (1)
- Manual de Partes D6N PDFDocument732 pagesManual de Partes D6N PDFYonny Colque100% (1)
- Installations ElectriquesDocument11 pagesInstallations Electriquesarfi missakilaPas encore d'évaluation
- Manual HT-R390 290 FrEsDocument108 pagesManual HT-R390 290 FrEsmarcu100Pas encore d'évaluation
- TP 02 1meltiDocument4 pagesTP 02 1meltikdjgkldfjlPas encore d'évaluation
- Tesys F - FG - Cr1f Et V - lc1f4004Document2 pagesTesys F - FG - Cr1f Et V - lc1f4004lucasPas encore d'évaluation
- Activer L'accès D'administration D'un Switch Via Telnet - CiscoMadeSimpleDocument16 pagesActiver L'accès D'administration D'un Switch Via Telnet - CiscoMadeSimpleDesquith BDPas encore d'évaluation
- Securité Chap2Document5 pagesSecurité Chap2Lilya ChaatalPas encore d'évaluation
- Offre de Stage Postdoctoral IRH 2014 - Gestion Locale de La DemandeDocument2 pagesOffre de Stage Postdoctoral IRH 2014 - Gestion Locale de La DemandedelislesPas encore d'évaluation
- CH 1 ThyristorDocument8 pagesCH 1 Thyristorcharletb toubiaPas encore d'évaluation
- Transmetteurs de Température Série PM:: 2-3 Autres InstrumentsDocument5 pagesTransmetteurs de Température Série PM:: 2-3 Autres Instrumentstaibaoui MohamedPas encore d'évaluation